Mise en place d'un PCB Can Bus sur la tête d'impression
Click here for the English version
BTT Cartes EBB et U2C
Pince à CRIMP si vous n'en avez pas
Pinces coupantes
Thermistance ATC Semitec 104GT-2
Cartouche chauffante 50W
Si vous avez déjà monté une imprimante ou changé le câblage, vous savez à quel point ça peut prendre du temps. En plus, ce n'est pas la partie la plus drôle...
Si vous faites une modification sur votre tête d'impression (changement de hotend, ajout d'un ABL, ajout d'un capteur, etc, etc) ça devient vite ennuyant de devoir ajouter des câbles dans nos gaines/chaines. C'est là qu'un PCB CAN BUS prend tout son sens.
Selon moi, les avantages sont :
- Faciliter le câblage. On a plus que 4 fils qui vont de la carte mère à la tête d'impression (Alimentation 24V et communication CAN)
- Flexibilité : cela facilite grandement toute modification que l'on veut effectuer sur notre chariot X
Les désavantages :
- Ajoute de la complexité : Un mcu supplémentaire et déclarer un CAN BUS dans Linux (c'est tout relatif car c'est à faire une seule fois)
- Ca prend un peu de place mais en général on sait s'en sortir :)
J'utilise une carte CAN BUS de chez Mellow sur ma Voron 2.4 depuis quelques mois. C'est que du bonheur, ça fonctionne très bien même en imprimant rapidement. Je fais ce tuto avec une carte BTT EBB et U2C que j'ai achetée pour ma Sidewinder X1. La raison est que celles-ci sont moins cher :)

La Raspberry Pi (ou tout autre mini ordinateur) n'a pas de bus CAN intégré. Il faut nous faut donc un convertisseur USB vers CAN. C'est ici que la carte U2C entre en jeu.

- CAN_IN : Rélié à un port USB de la Raspberry Pi, c'est la communication USB.
- Power : A relier à notre alimentation 24V, ce sera l'alimentation de notre tête d'impresison.
- CAN_OUT : On peut utiliser une de ces 4 sorties pour cabler notre tête d'impression. On utilisera une des deux du bas vu les courrants qui vont circuler (40W minimum pour rien que pour la cartouche de chauffe)
- CAN_OUT* : Ces 2 connecteurs USB sont des ports CAN sur lesquels ont peut brancher une carte mère compatible. Ce ne sera pas notre cas ici, notre carte mère est reliée en USB à la Rpi.
- CAN 120R : Ces jumpers connectent les terminaisons du CAN BUS. Ils sont à placer.
Cette carte sera celle qui se trouvera sur notre tête d'impression.

- TYPE-C : Port USB que nous utiliserons pour flasher (une seule fois) le MCU avec un Bootloader. Cela permetra de pourvoir flasher le MCU en CAN BUS à l'avenir.
- En bleu,le BUS CAN, à relier à la carte U2C.
- Probe : peut être utilisé pour n'importe quel ABL. Ici nous utiliserons un BL Touch.
- I2C : Connecteur rélié à l'I2C du MCU. Peut être utilisé pour brancher différents capteurs. Nous ne l'utiliserons pas dans ce tuto.
- RGB : Peut être utilisé pour relier des leds type Néopixel. Très utile si on l'utilise sur un StealthBurner. Nous ne l'utiliserons pas dans ce tuto.
- Endstop : Est utilisé pour câbler les endstops. Si vos Endstops X et Y sont sur le chariot X, c'est très pratique :)
- PT100/PT1000 : Ne sera pas utilisé dans ce tuto car on utilise une sonde de température standard type Generic 3950 ou ATC Semitec 104GT-2.
- TH0 : Capteur de température Hotend.
- FAN1 & FAN2 : seront utilisés pour le ventillateur Hotend & Buse.
- Hotend 0 : Ce bornier alimente la cartouche chauffante.
- E motor : C'est ici que l'on branchera notre moteur extrudeur. (Un TMC2209 est intégré à la carte)
Normalement la carte U2C est programmée d'usine. Si toutefois ce n'étais pas le cas, nous allons voir comment faire.
- Téléchargez le programme https://www.st.com/en/development-tools/stm32cubeide.html et décompressez le à l'endroit souhaité.
- Connectez la carte U2C à votre PC en maintenant le bouton sur la photo pour la faire rentrer en mode DFU (La led "Status" bleue doit s'alumer).

- Lancer STM32CubeProgrammer\bin\STM32CubeProgrammer.exe.
- La carte doit etre reconnue dans STM32CubeProgrammer.

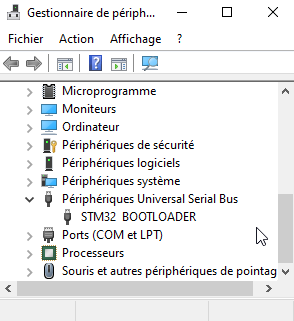
Elle apparait aussi dans le Gestionnaire de périphériques Windows.
- Cliquez sur connect.
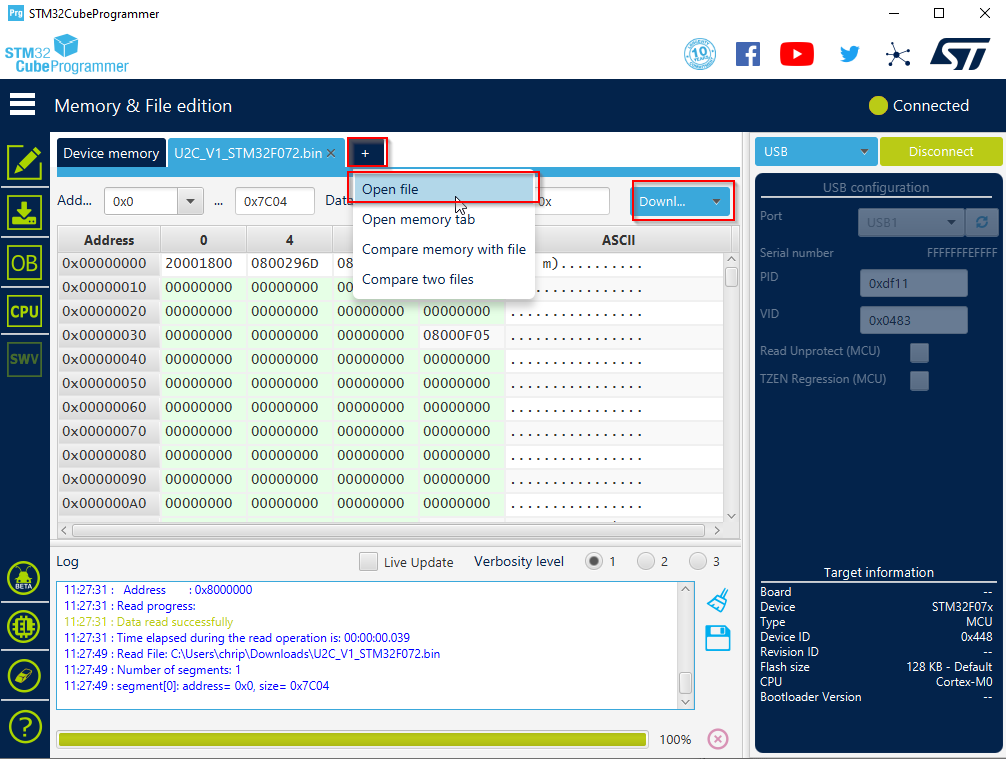
- Sélectionnez le fichier à programmer ici https://github.com/bigtreetech/U2C/tree/master/firmware
Pour savoir quel fichier choisir, il faut lire les annotations sur le MCU de la carte.

Pour moi il s'agit d'un STM32F072. - Ouvrez le fichier et appuyez sur le bouton Download pour flasher la carte.





Afin de flasher le bootloader, nous allons devoir mettre la carte EBB en mode DFU (comme pour la carte U2C précédement).
Pour ce faire, branchez la carte en USB à la Raspberry Pi en maintenant le bouton poussoir enfoncé. Si le 24V n'est pas encore relié, vous devrez aussi mettre le Jumper VBus pour alimenter la carte en USB.


Arksine nous a développé un SUPER bootloader CAN. Il permettra de mettre à jour Klipper en CAN directement. Nous n'aurons donc plus besoin de brancher le Cable USB ou de passer en mode DFU.
- Connectez-vous à votre Imprimante en SSH.
- Installez DFU_UTIL avec la commande suivante :
sudo apt install dfu-util -y - Assurez vous que votre carte est bien détectée en mode DFU :
lsusb
Si celle-ci ne l'est pas, faites un nouveau reset.
On peut déjà observer notre ID USB que l'on peut noter. Pour moi 0483:df11. - Téléchargons maintenant le CanBoot
git clone https://github.com/Arksine/CanBoot
cd CanBoot - On compile le CanBoot pour notre MCU.
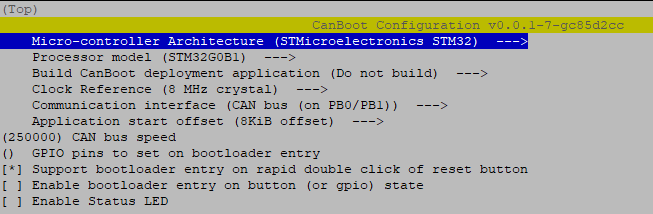
make menuconfig
⚠️ La carte U2C est programmée pour fonctionner à une fréquence CAN de 250000. Veillez bien à toujours utiliser cette valeur et non 500000 par défaut.
make
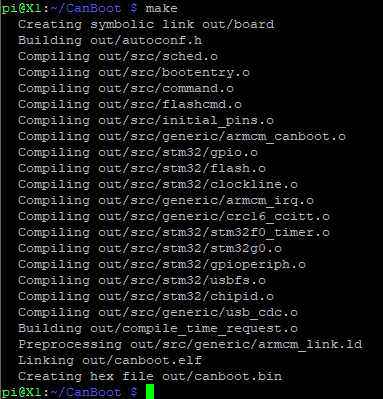
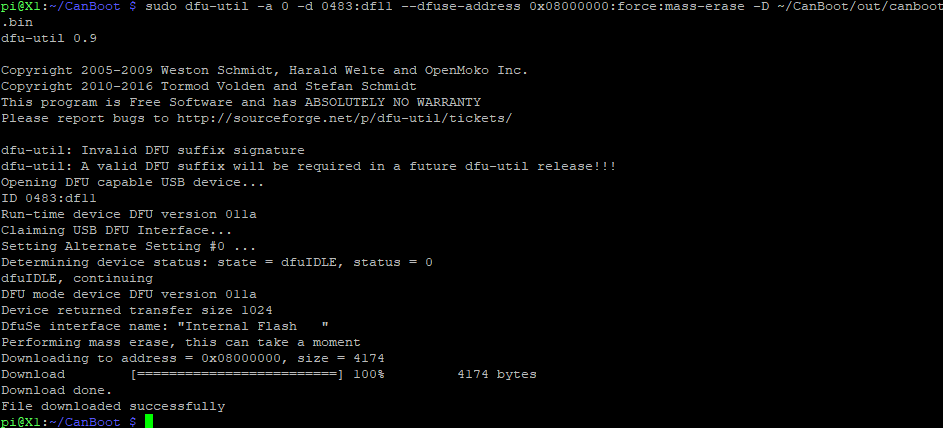
- On peut maintenant flasher le Bootloader qu'on a compilé
sudo dfu-util -a 0 -d 0483:df11 --dfuse-address 0x08000000:force:mass-erase -D ~/CanBoot/out/canboot.bin




- Installer nano si ce n'est pas déja fait
sudo apt update && sudo apt install nano -y - Créer le fichier de configuration pour le port CAN. Copier Coller d'un bloc.
sudo /bin/sh -c "cat > /etc/network/interfaces.d/can0" << EOF
allow-hotplug can0
iface can0 can static
bitrate 250000
up ifconfig \$IFACE txqueuelen 1024
EOF - Ouvrez le fichier et vérifiez le
sudo nano /etc/network/interfaces.d/can0
Il est possible que le$IFACEn'ai pas été copié. Ajoutez le si nécessaire et enregistrez avec CTRL+X - Y - ENTER - Activer automatiquement le CAN à la mise sous tension
sudo wget https://upyun.pan.zxkxz.cn/shell/can-enable -O /usr/bin/can-enable > /dev/null 2>&1 && sudo chmod +x /usr/bin/can-enable || echo "The operation failed"
sudo cat /etc/rc.local | grep "exit 0" > /dev/null || sudo sed -i '$a\exit 0' /etc/rc.local
sudo sed -i '/^exit\ 0$/i \can-enable -d can0 -b 250000 -t 1024' /etc/rc.local - On reboot la Rpi.
sudo reboot
Pour le cablage :
- 24V : Il faut garder à l'esprit que TOUTE l'alimentation passera par cette paire de cables. Cela inclut la cartouche de chauffe, le moteur, bl touch, etc.
Il faut donc prévoir une section suffisante pour supporter le courrant. Une section de min 0.5mm est recommandée. - La Communication CAN : Très peu de courrant passe ici. Vous pouvez utiliser les mêmes cables que pour le 24V ou choisir des plus fins.
Mon choix personnel est d'utiliser un cable Ethernet. J'utilise 3 paires pour le 24V et une paire tosadée pour la communication CAN.
Sur la carte U2C, il n'y a pas de pinout indiqué et la documentation ne le mentionne pas clairement.
Voici le pinout :


Sur la carte EBB, le Pinout est clairement indiqué :)

Les cartes sont maintenant montées et câblées, Il est maintenant temps de flasher Klipper sur la EBB.
- D'abord on Compile Klipper pour notre EBB
cd ~/klipper
make menuconfig

make clean
make - Ensuite, on va identifier notre périphérique CAN. On doit connaitre son ID pour le flasher.
sudo service klipper stop
cd ~/klipper/lib/canboot/
python3 flash_can.py -q
Mon CAN ID estebf7f23a7d85

- Et enfin on flash la EBB
python3 flash_can.py -i can0 -f ~/klipper/out/klipper.bin -u ebf7f23a7d85
sudo service klipper start
Lorsqu'une mise à jour sera nécessaire, cette étape sera le seule à devoir être répetée.
Il ne reste maintenant plus qu'à faire la configuration Klipper.


Dans le fichier printer.cfg, ajoutez [include EBB.cfg] et ajouter le fichier EBB.cfg dans la configuration klipper.
Commentez :
- Fan & Nozzle Fan
- Toute la partie extrudeur
- [bltouch]
sensor_pin:
control_pin:
Les nouvelles pins sont définies dans le fichier EBB.cfg
Dans le fichier EBB.cfg ajustez les paramètres : - Rotation distance (selon votre extrudeur)
- [tmc2209 extruder] run_current =
VOTRE VALEUR - Vérifiez que tous les autres paramètres correspondent à votre configuration.
Carte U2C BigTreeTech Github https://github.com/bigtreetech/U2C
Carte EBB BigTreeTech Github https://github.com/bigtreetech/EBB
STL de Montage des cartes Voron French Users Github https://github.com/elpopo-eng/VoronFrenchUsers/tree/main/Mod/Huvud_mounts
Can Bootloader https://github.com/Arksine/CanBoot
Mini tuto de Benoit V2.1277 Sur le Discord VoronFR https://discordapp.com/channels/811518442721116232/967097962582933586/967101437899337738
Documentation Mellow https://mellow.klipper.cn/#/board/fly_sht36_42/