「Raspberry Piで学ぶ ROSロボット入門」の6章から9章までをRaspberry Pi Catに対応させたプログラムです。
コードを書く際、上記書籍のpimouse_rosをraspicat_basicに読み替えながらプログラムを書くことで本リポジトリと同じプログラムが作成できるようになります。
そのほか本リポジトリではryuichiueda/raspimouse_book_infoにて公開されている修正点を反映した状態で公開しています。
- パッケージ名
- Raspberry Pi Cat固有のパラメータ
- TravisCIでエラーが出る問題
- 超音波センサの対応順(sideとforwardの関係)を実機に合わせて修正
- Travis CIのMelodic対応
Raspberry Pi CatはRasberry Pi Mouseとサイズが異なるため、指令された移動速度からモータへの指令を計算するためのノードに記述するパラメータが異なります。
詳しくはこちらに書いてあります: https://www.rt-shop.jp/blog/archives/11058
- Raspberry Pi Mouse (「Raspberry Piで学ぶ ROSロボット入門」のP.279参照)
- ホイール径: 45[mm]
- トレッド: 90[mm]
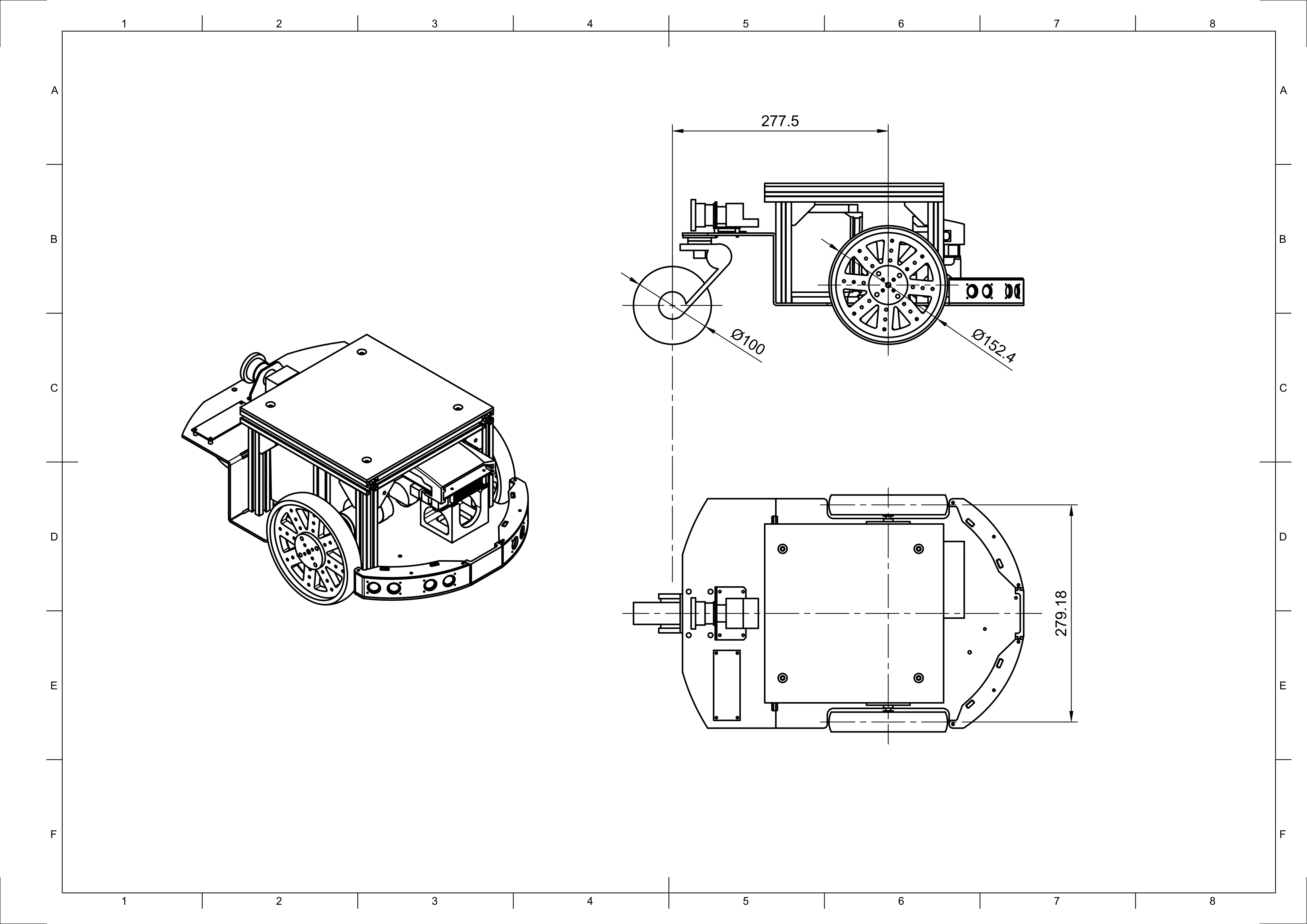
- Raspberry Pi Cat
- ホイール径: 152[mm]
- トレッド: 279[mm]