This package contains a python implementation of the B-spline Surface SLAM algorithm, a Simultaneous Localization and Mapping (SLAM) algorithm for range-based measurements using B-spline surfaces maps.
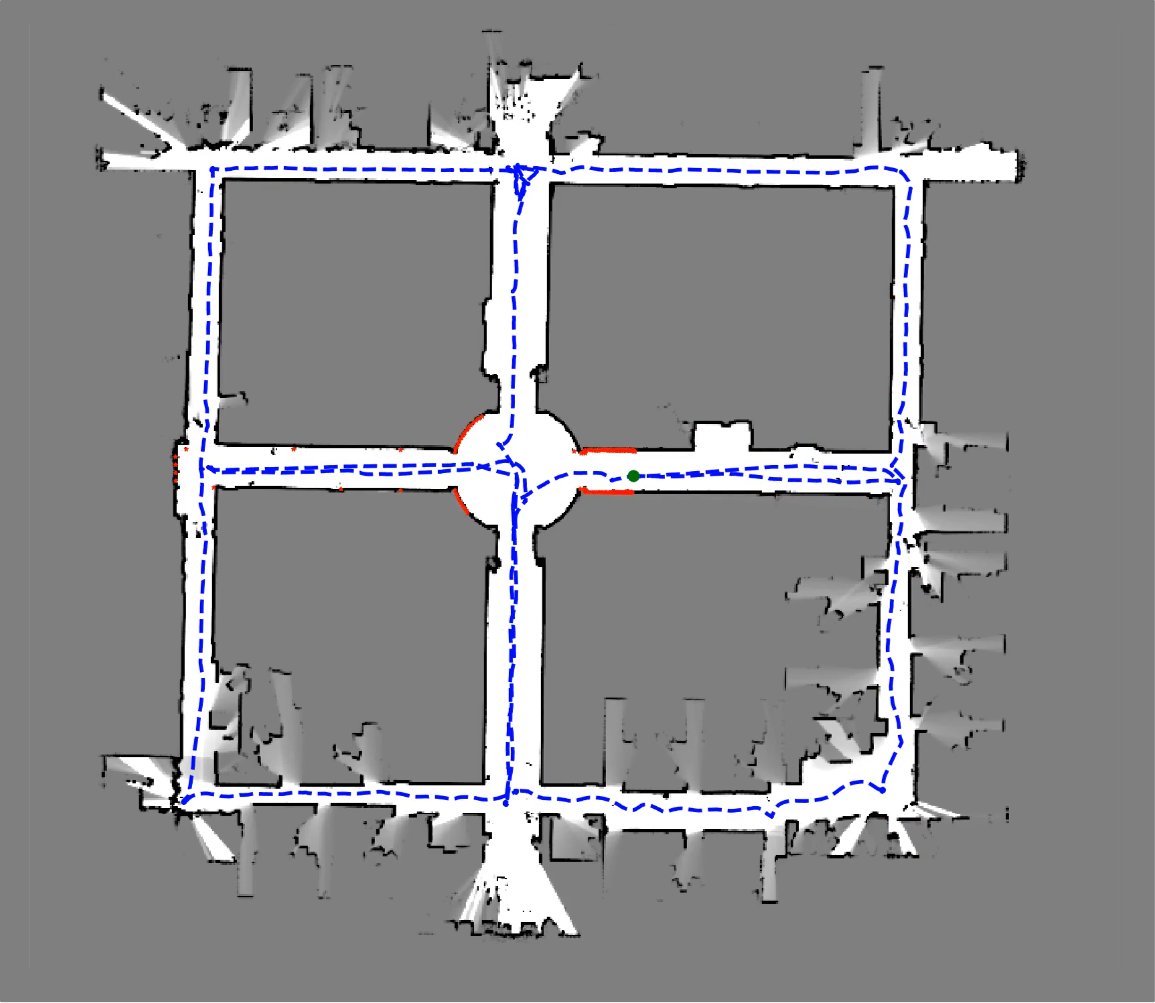
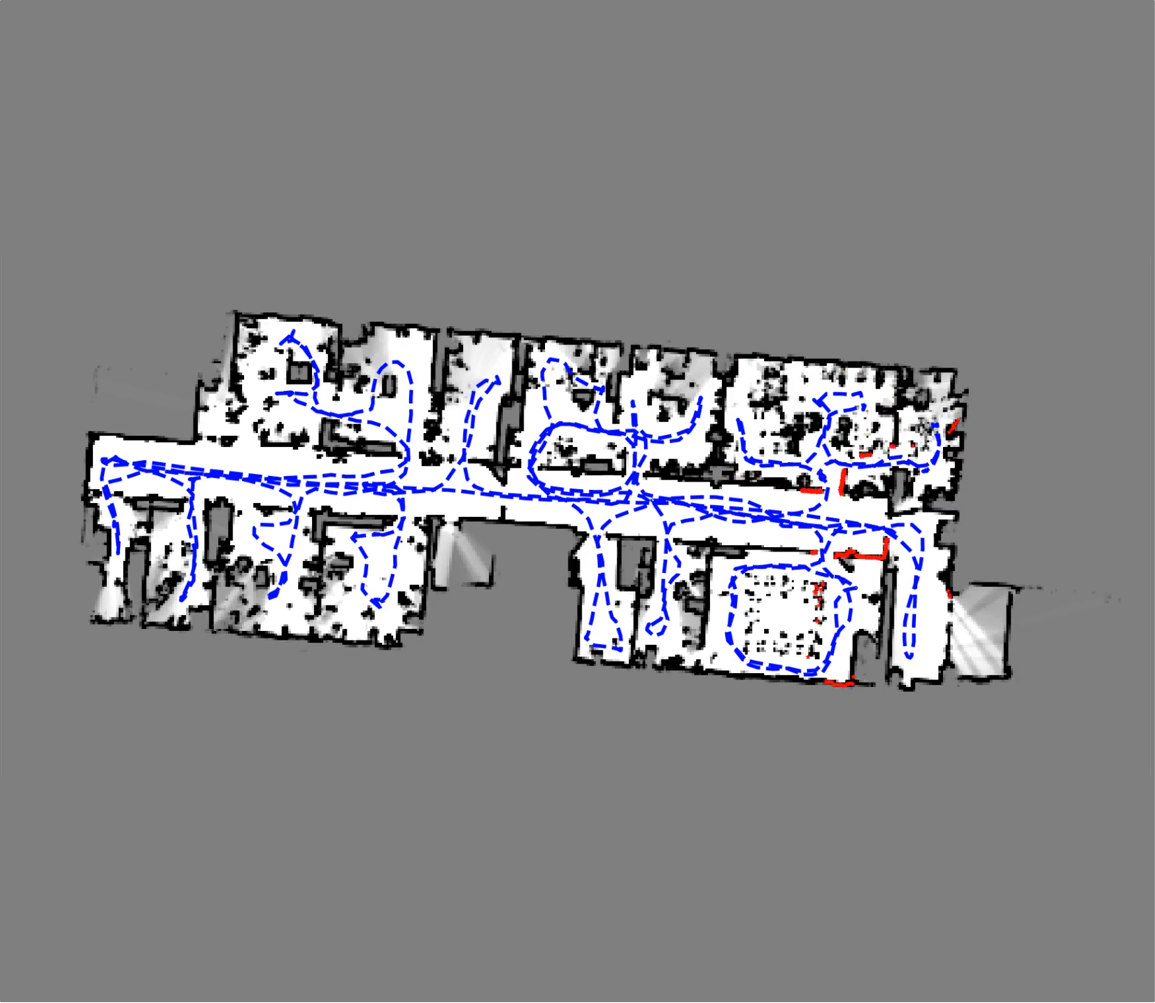
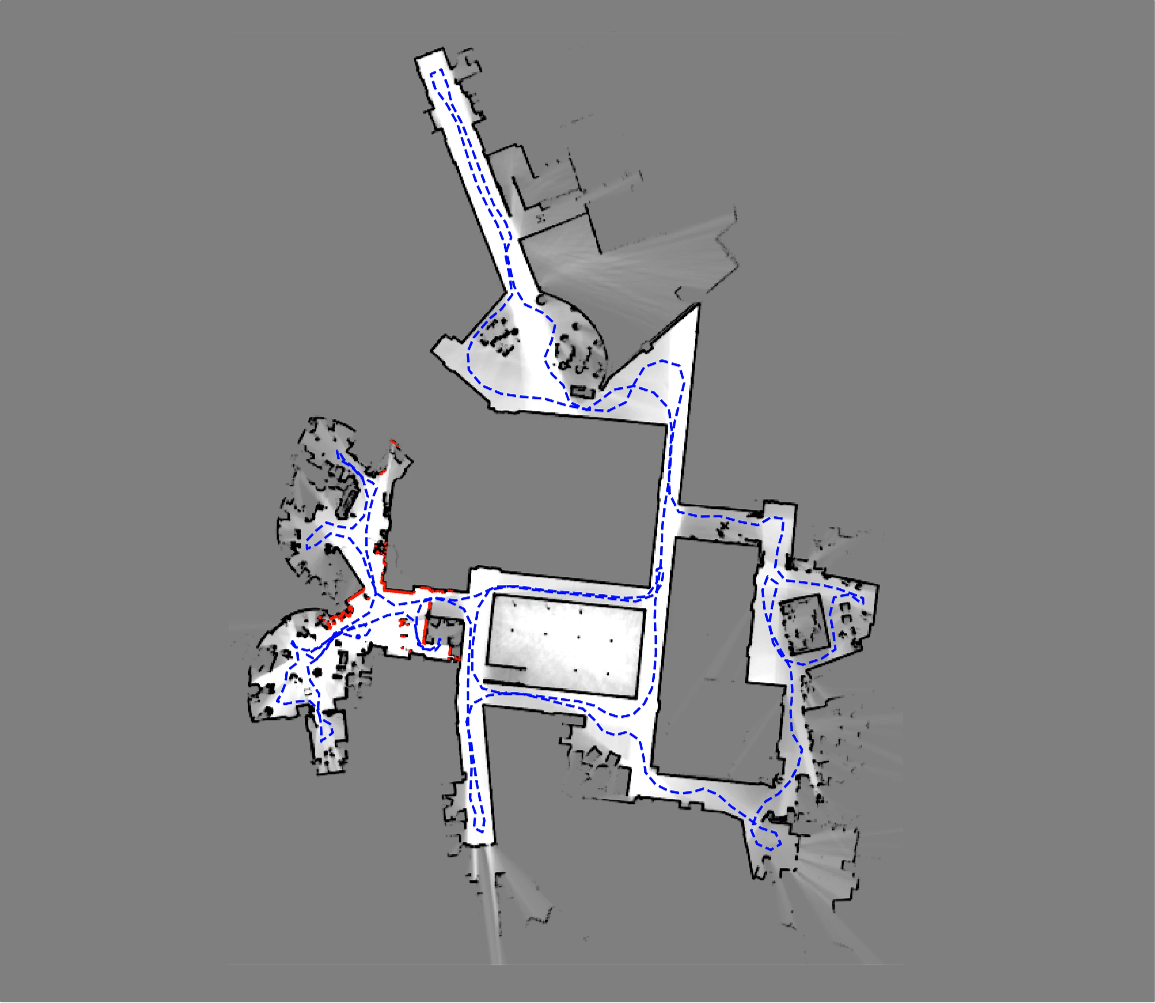
Output using the RADISH repository (click on the image to load video)
| Intel Research Lab | ACES building | Freiburg 079 | MIT-CSAIL |
|---|---|---|---|
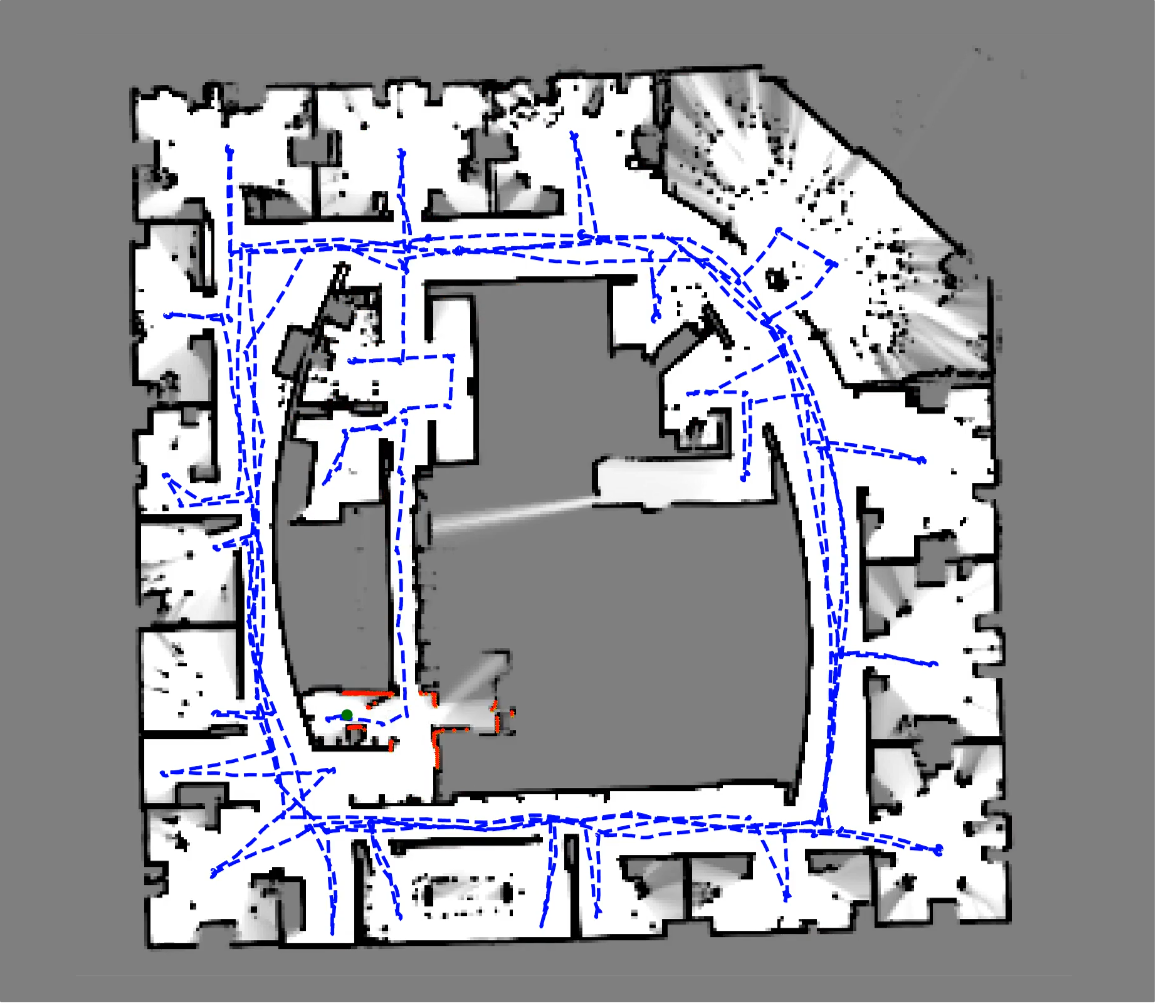 |
 |
 |
 |
The algorithm is implemented in python3. For installing the requires python packages, type the following command:
pip3 install numpy scipy matplotlib
After that, clone this repository. Open a terminal and navigate until the root folder of the package and enter
pip3 install -e .
The package has an example to run the algorithm from a log file. Each scan reading corresponds to a row in the log using the format described below:
| timestamp | odom.x | odom.y | odom.theta | range[0] | range[1] | ... | range[n-1] |
|---|
timestamp: scan reading time in seconds (optional)
odom.x: x position estimation from odometry (optional)
odom.y: y position estimation from odometry (optional)
odom.theta: orientation estimation from odometry (optional)
range[0] .. range[n-1]: n-readings from the range sensor
Optional fields must be set to 0.0 if no information is available.