Table of Contents generated with DocToc
尝试在arm32/arm64/cortex-m/riscv64上学习一些裸板编程
arm32/mmu arm64/mmu cortex-m/hello riscv/mmu
编译选项
-mthumb -mcpu=cortex-a7
qemu
qemu-system-arm -M virt -cpu cortex-a7
此示例可以在嵌入式mcu中建立c运行时环境。 实现汇编代码初始化c语言运行环境的示例 ".data"段的加载地址指向__etext,将".data"的数据放置在".text"段的后面,同时实现DATA_COPY,在启动时拷贝__etext起始的数据到".data"中,这种".data"的链接地址和加载地址不同的做法通常是在嵌入式MCU中比较常用,由于芯片只能在rom或flash中保存代码,".data"段中的初始值也必须保存在rom或flash中,所以".data"加载地址通常放在".text"段末尾。 还实现了ZERO_SET用于".bss"段初始化。
测试不加如下选项,生成的elf文件的差异
# CFLAGS += -fno-builtin -ffreestanding
# LDFLAGS += -nostdlib
# LDFLAGS += -L/Users/starot/bin/gcc-arm-none-eabi-10.3-2021.10/lib/gcc/arm-none-eabi/10.3.1/ -lgcc
未完成
编译选项
-march=armv8-a -mcpu=cortex-a57
qemu
qemu-system-aarch64 -M virt -cpu cortex-a57
简单的串口串口打印示例
编译选项
-march=armv7-m -mcpu=cortex-m3
qemu
qemu-system-arm -M lm3s6965evb -cpu cortex-m3
未完成
进入相应子目录会看到如下目录结构
$ tree
.
├── link.ld
├── Makefile
├── README.md
└── src
├── xxx.S
├── xxx.h
└── xxx.c
执行make qemu命令可以运行示例代码,退出qemu,先同时按ctrl+a然后松开之后按下x键。
以riscv/yield为例
使用xxx-none-gnu-gdb或安装gdb-multiarch
在第一个终端里运行
make qemu-gdb
启动第二个终端运行
gdb-multiarch -tui -q -iex "set auto-load safe-path ./"
使用xxx-none-gnu-gdb或安装gdb-multiarch,下载vscode,安装native-debug插件(C/C++插件的调试没有成功)
- 在示例目录下新建.vscode文件夹
- 在.vscode文件夹新建launch.json文件,内容参考如下
{
"configurations": [
{
"name": "(native-debug) Attach to gdbserver",
"type": "gdb",
"request": "attach",
"executable": "${workspaceFolder}/build/main.elf",
"target": "127.0.0.1:26000",
"remote": true,
"cwd": "${workspaceFolder}",
"gdbpath": "/usr/bin/gdb-multiarch",
"debugger_args": [
],
"valuesFormatting": "parseText"
},
]
}
- 在终端中运行
make qemu-gdb
- vscode中先在汇编代码中添加断点(也可以先不加断点),点击Run->Start Debugging开启调试
使用xxx-none-gnu-gdb或安装gdb-multiarch,下载Eclipse IDE for Embedded C/C++ Developers
- 先在终端中执行"make qemu-gdb"
- 点击File->New->Project
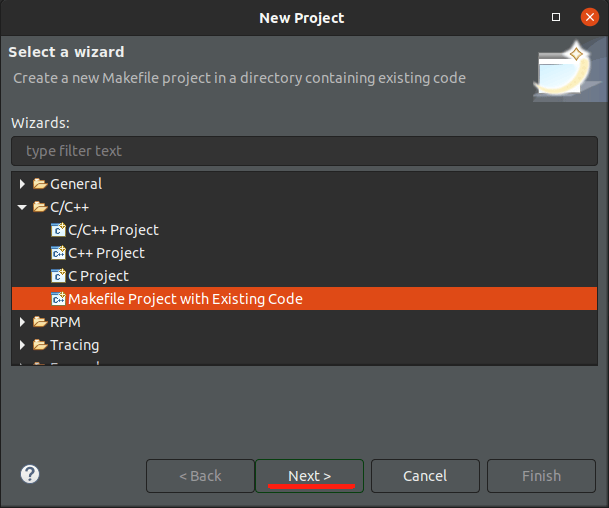
- 选择Makefile Project with Existing Code,点击Next
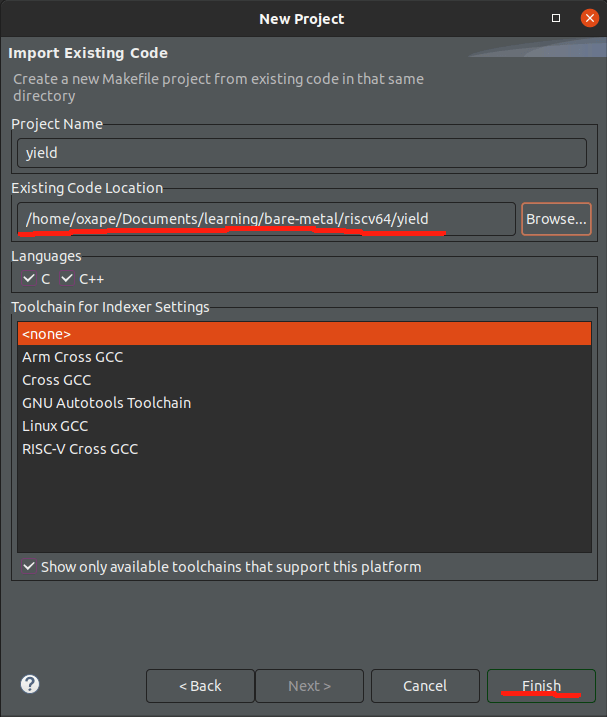
- 点击Browse选择示例目录,点击Finish
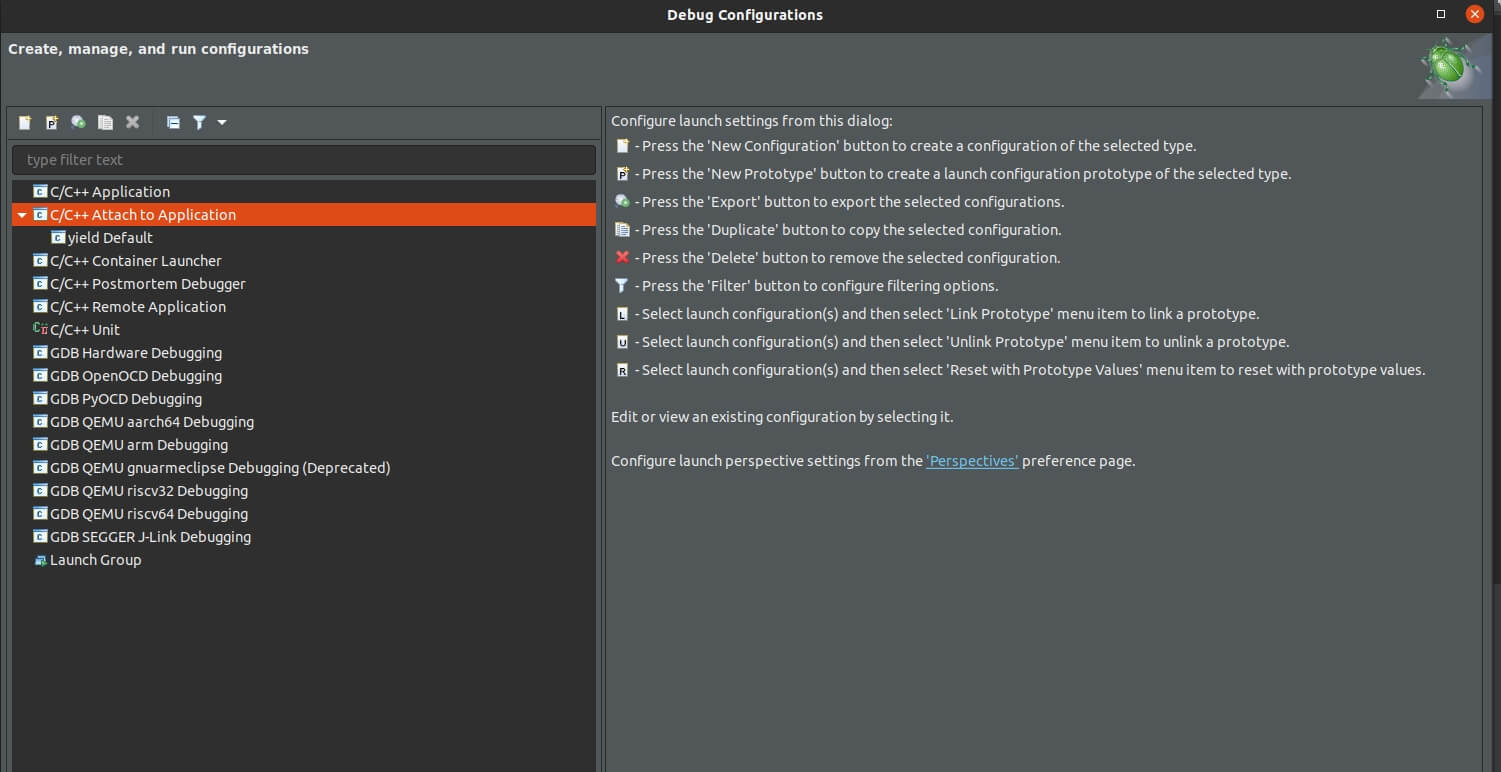
- 点击Run->Debug Configurations,双击C/C++ Attach to Application会新建一个配置,可以根据需要重名
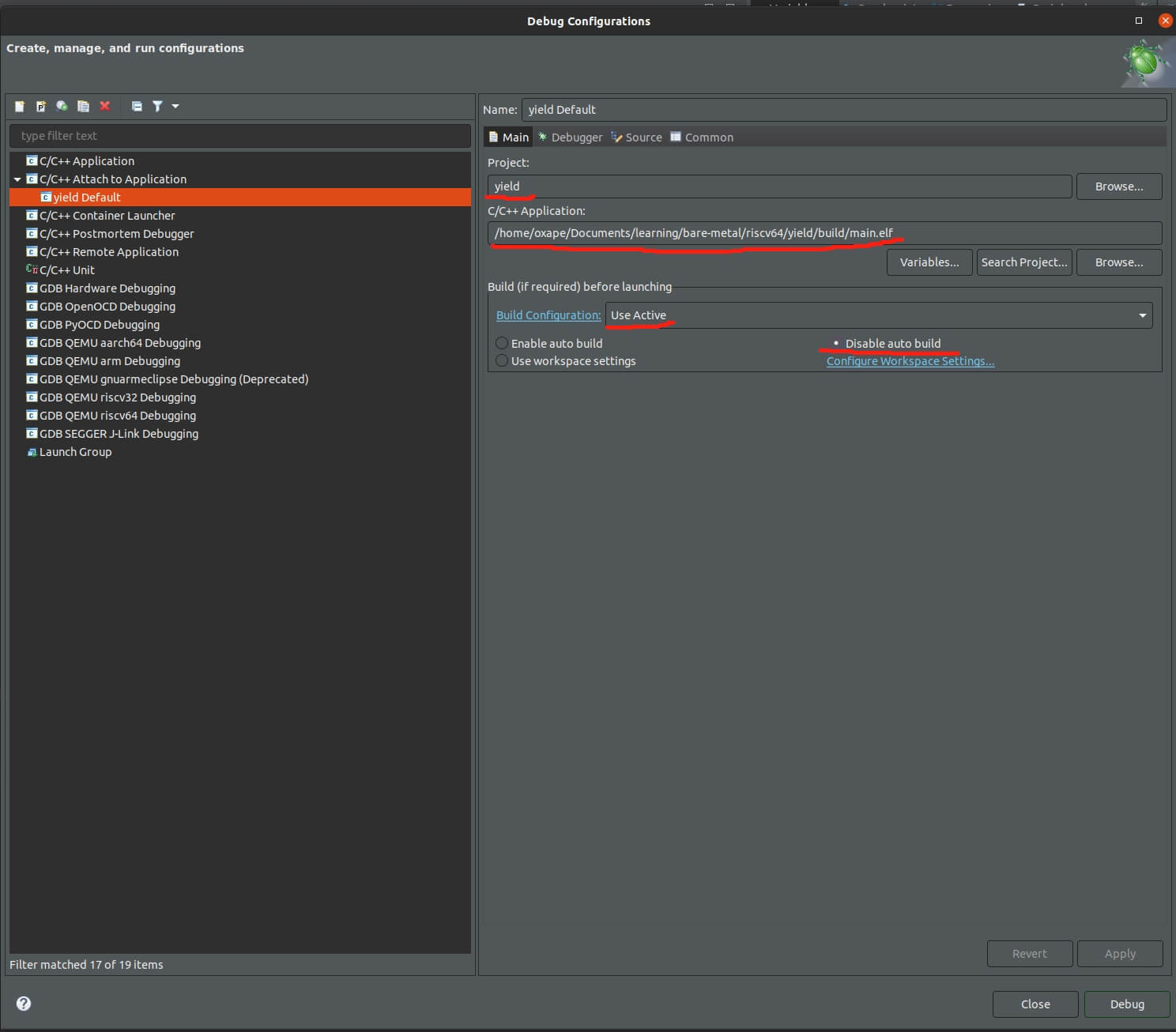
- 选择刚刚新建的配置,点击左侧Main选项卡,Project中点击Browse选择刚刚创建的工程yield,C/C++ Application中点击Browse选择make生成的main.elf文件。Build(if required)before launching选择Disable auto build
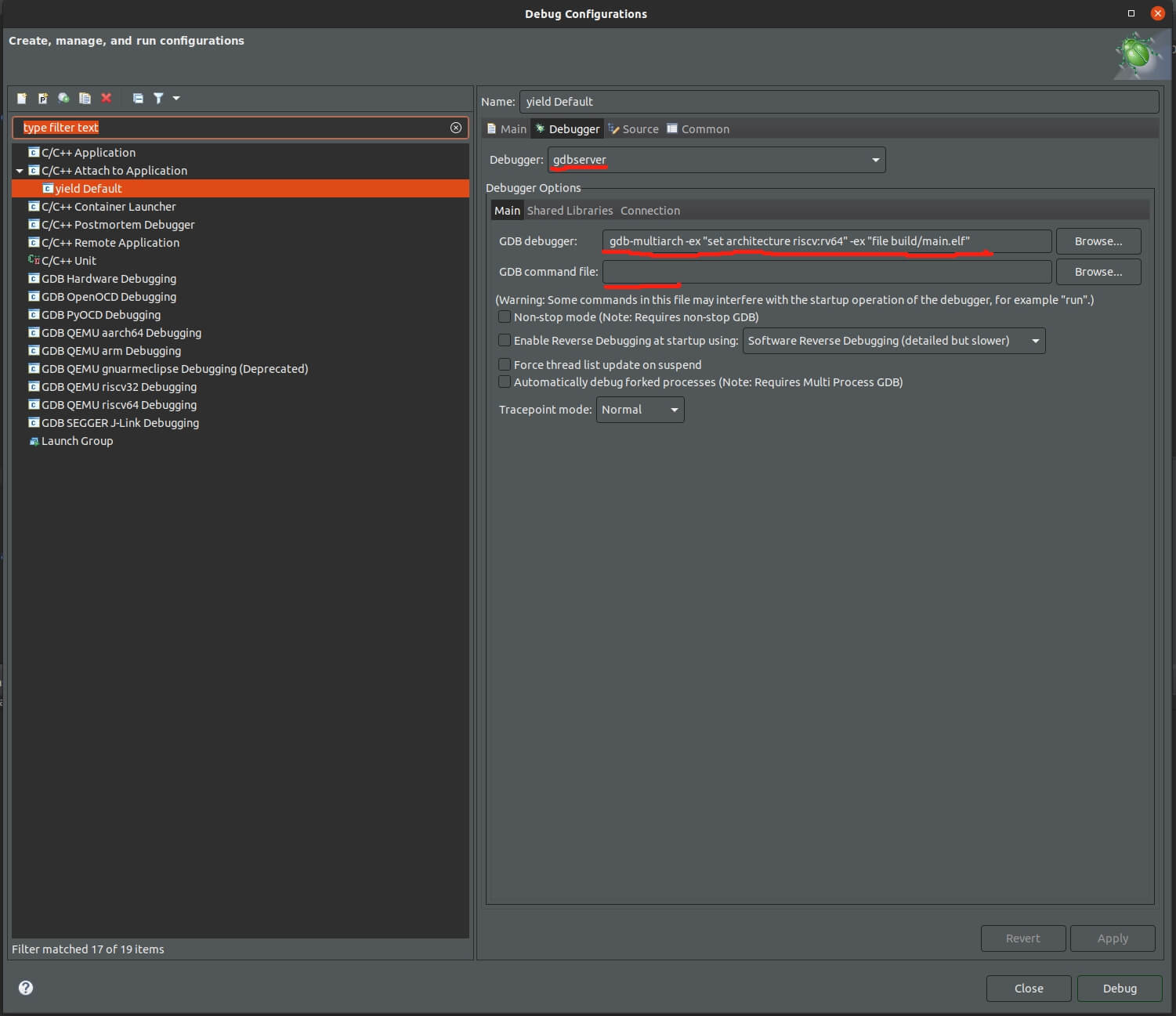
- 选择Debugger选项卡,选择gdbserver,下面的Main选项卡参照图片,GDB debugger填入
gdb-multiarch -ex "set architecture riscv:rv64" -ex "file build/main.elf",同时GDB command file删除里面的内容
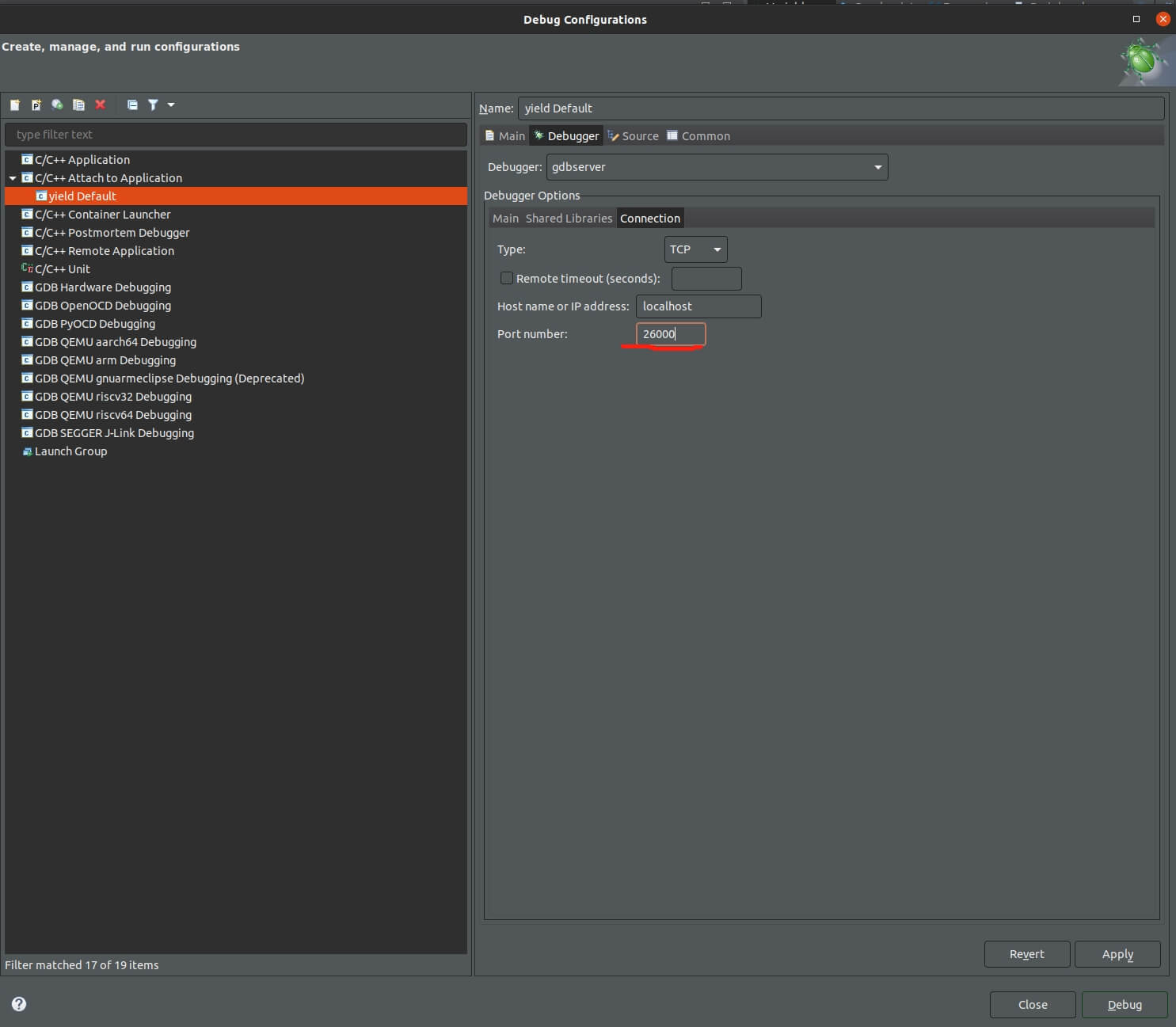
- Debugger选项卡,下面Connect选项卡,Type选择TCP,Port number选择26000
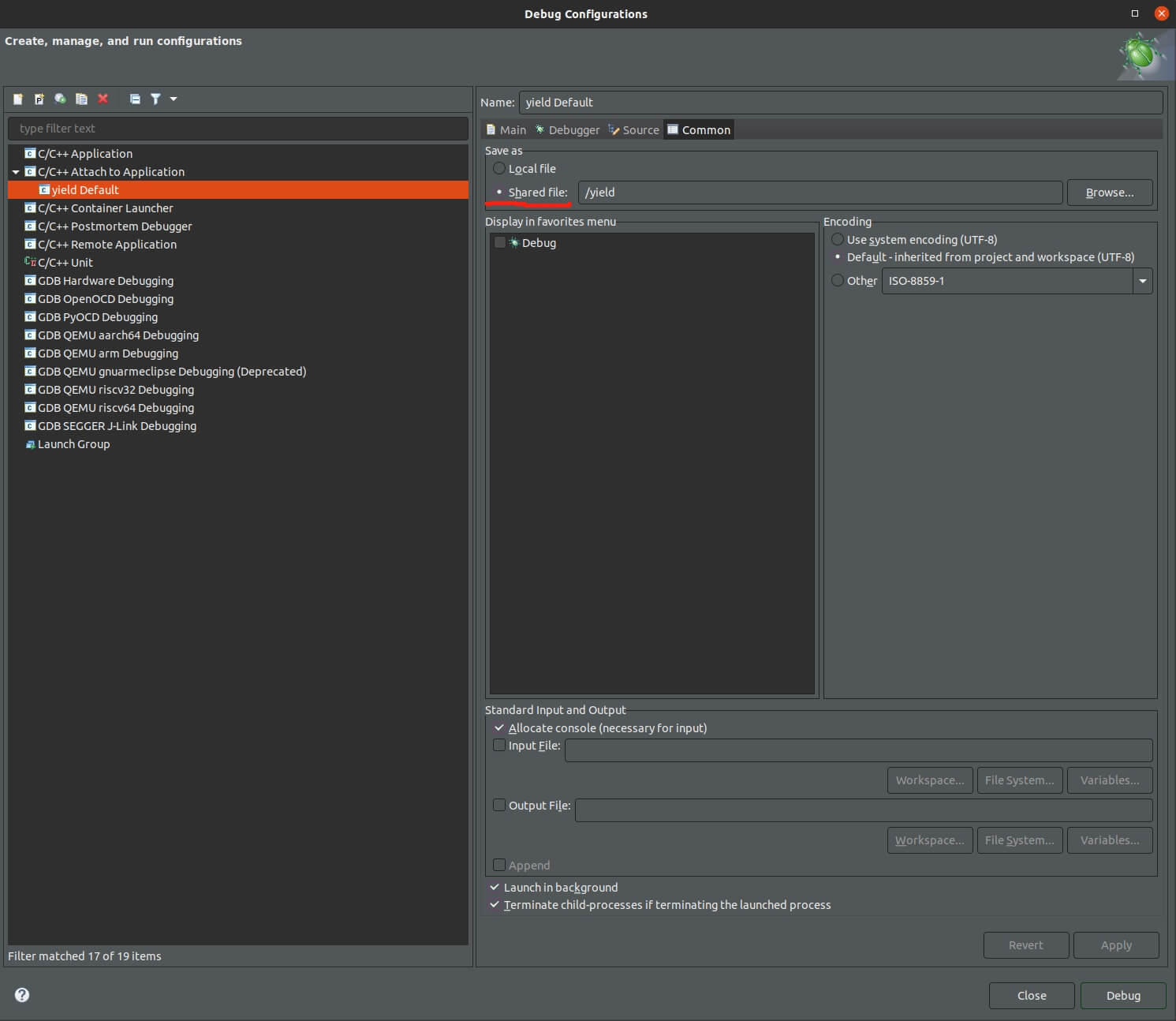
- Common选项卡,Save as选择Shared file
- 点击Apply,然后点击Debug(可以在Debug前先设置一个断点)。







gcc使用选项"-march=armv7-m -mcpu=cortex-m3"编译如下代码
LDR r0, =stack_bottom
ADD r0, r0, #1024
出现错误
src/start.S:4: Error: immediate value out of range
这是因为thumb-2模式中add立即数的范围是-255 到 +255
修改为如下代码即可
LDR r0, =stack_bottom
LDR r1, =1024
ADD r0, r0, r1

Cortex-M0 / M0+ / M1实现的是ARMv6-M架构[2],Cortex-M3实现的是ARMv7-M架构[3],Cortex-M4 / Cortex-M7实现的是ARMv7E-M架构[3]。Cortex-M23 / M33 / M35P实现的是ARMv8-M架构[15],Cortex-M55实现的是ARMv8.1-M架构[16]。这些架构是二进制的脚本,可以和ARMv6-M、 ARMv7-M、ARMv7E-M向上兼容。Cortex-M0 / Cortex-M0+ / Cortex-M1的脚本不用修改就可以在Cortex-M3 / Cortex-M4 / Cortex-M7上执行。Cortex-M3上可以执行的二进制代码不需修改就可以在Cortex-M4 / Cortex-M7 / Cortex-M33 / Cortex-M35P上执行[2][3]。Cortex-M架构中支持Thumb-1和Thumb-2的指令集,不支持早期的32-bit ARM指令集。
所有Cortex-M的核心都有一个共通的指令子集,包括大部分Thumb-1指令、一些Thumb-2指令,以及结果为32位的乘法。Cortex-M0 / Cortex-M0+ / Cortex-M1 / Cortex-M23设计目的就是希望让硅晶面积最小,因此其指令集也是Cortex-M家族中最少的。
Cortex-M0 / M0+ / M1中有Thumb-1指令,不过没有ARMv7-M架构才加入的指令(CBZ, CBNZ, IT)。Cortex-M0 / M0+ / M1包括一小部分的Thumb-2指令(BL, DMB, DSB, ISB, MRS, MSR)。Cortex-M3 / M4 / M7 / M33 / M35P 有所有基本的Thumb-1和Thumb-2指令。Cortex-M3加上了三个Thumb-1指令、所有的Thumb-2指令、硬件的整体除法、以及饱和运算指令。Cortex-M4加上了数字信号处理(DSP)指令,以及可选的单精度浮点运算器(VFPv4-SP)。Cortex-M7加上了可选的双精度浮点运算器(VFPv5)[2][3]。Cortex-M23 / M33加上了TrustZone指令。