A custom firmware for the Wild Thumper Controller and an Android application to drive the controller. The Android app communicates with the controller using Bluetooth with a IOIO board
- Connect Pin7(UART TX) on the IOIO board to D0 pin (towards chip) on controller.
- Connect any GND pin on the IOIO board to any GND pin on controller.
- Compile the firmware by running
make - Edit the
Makefileand make sure theUARTPORTis set to the appropriate serial device - Flash the firmware by running
make flash
- Open with Android Studio and run as usual.
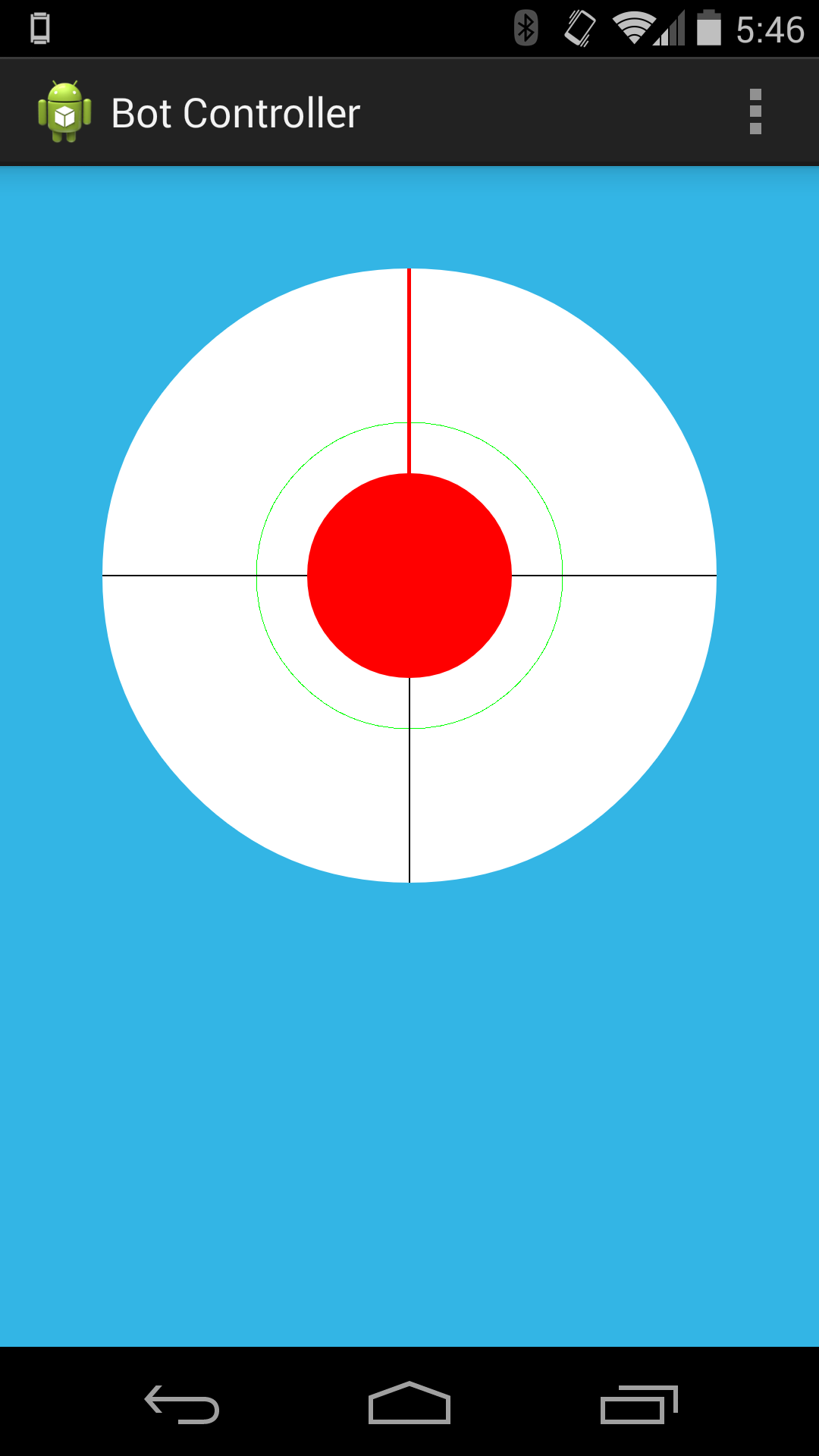
- Portrait orientation will present the user with a Joystick
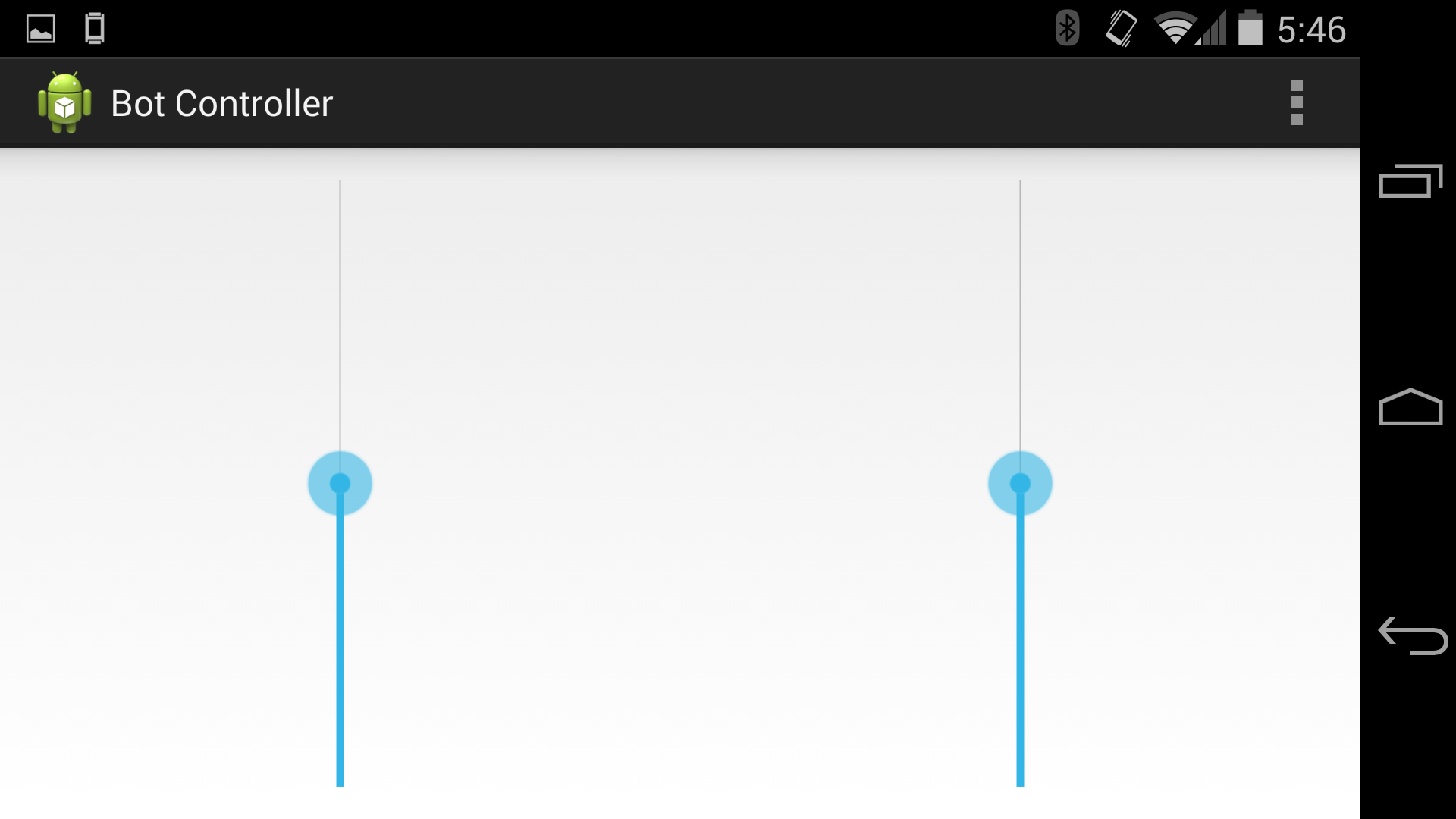
- Landscape orientation will present the user with tank tracks