This repo provides minimal hands-on code for MuJoCo Robotics Algorithms.
(This repository only covers the MuJoCo simulation. Realworld is not included)
MuJoCo related code is employed from following repos:
- [MuJoCo] https://github.com/deepmind/mujoco
- [YAMT] https://github.com/sjchoi86/yet-another-mujoco-tutorial-v3
Some of the robot models referenced mujoco_menagerie
- [mujoco_menagerie] https://github.com/deepmind/mujoco_menagerie
This repo is tested on following environment:
- Ubuntu: 20.04
- Python: 3.8.10
- mujoco: 2.3.2
Mujoco Engine
pip install mujoco
pip install mujoco-python-viewerBelow is a list of files and their descriptions:
-
Kinematic Solver
- Solve inverse kinematics in various method with
- [General]

 >
>
- [Augmented],
- [Nullspace projection]
- [Repelling]
- [RRT*]
- [General]
- Solve inverse kinematics in various method with
-
Trajectory Planning method
- [Task space planning]
- [Quintic]
* [Minimum Jerk] * [Linear movement]

- [Velocity profile method]:
- [Trapezoidal]
- [s-Spline method]
- [Task space planning]
-
Demos
- [Pick-n-Place]
- [Pick-n-Place]
-
Mobile Planning method
- [Mobile Velocity Control]
- [Global planner]
- [A*]
- [RRT]
- [RRT*]
- [Local planner]
- [Pure-pursuit]
- [Mobile Velocity Control]
-
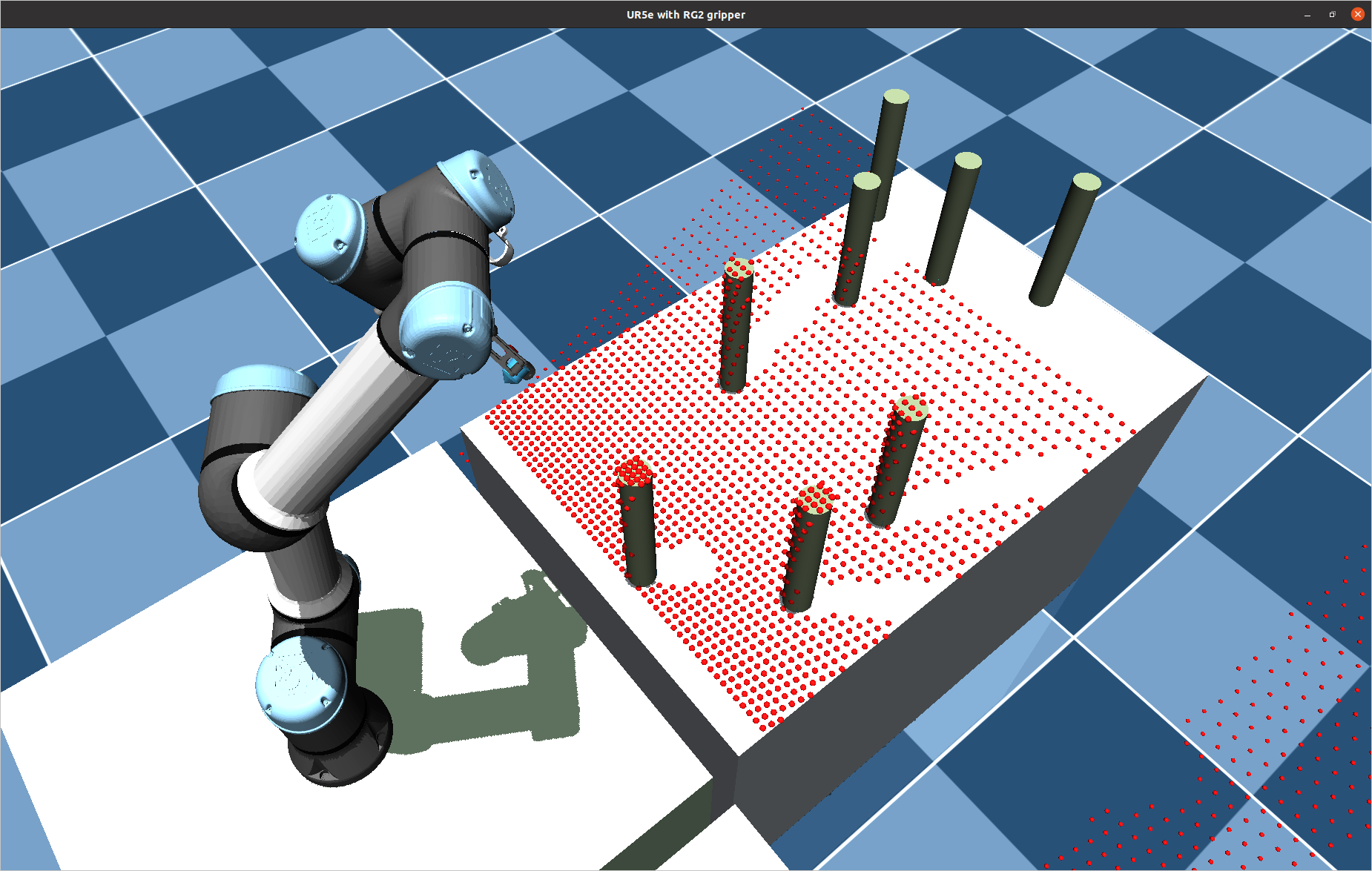
Point-cloud
-
[Point-cloud Projection]
-
[RANSAC]
-
[Iterative Closet Point]
-
[Extrinsic calibration]
-
-
Segmentations
-
Miscellaneous
- [Multi-vivwer] Add Multi-Viewer toy examples: Get images from camera defined in an XML(MJCF) files.

 >
>
- [Multi-vivwer] Add Multi-Viewer toy examples: Get images from camera defined in an XML(MJCF) files.









