IK_Solver - Inverse Kinematic Solver for n-link serial chain
The interactive IK_Solver program graphically demonstrates implementation of several inverse kinematic solving techniques, as presented in the referenced documents, for two and three dimensional, revolute joint, n-link serial chains. The program is written entirely in version 2 and 3 compatible Python and requires SciPy, primarily for NumPy and Matplotlib packages. A MATLAB®/Octave script variant is also provided in the ./MATLAB subdirectory of this distribution. For both Python and MATLAB®/Octave variants, a video encoder application, such as ffmeg or avconv from Libav, is required to record graphic animations.
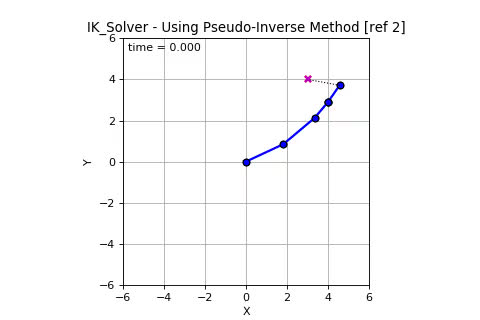
The following images and hyperlinked video clips depict the motion of two dimensional (2D) and three dimensional (3D) five revolute joint, 4-link serial chains (blue line) as the end-effector moves from its initial position (green line) towards a moving target (red x). Although 14 simulation seconds (140 frames @ 10FPS) are shown, it only took 2.52 and 5.44 seconds for the 2D and 3D link chains respectively to reach the target. In both cases the end-effector moves to a predicted intercept point (magenta x) along the target's path of motion. Joint rotation clamping and rotation rate limiting are utilized to provide a more realistic simulation of the link chain's movement. Even though only four links are apparent in the serial chains shown, both actually have five links. A zero length link separates two orthogonal revolute joints between the last two visible links; the last link considered as the end-effector.
| 2D 4-Link Frame 0 | 2D 4-Link Frame 140 |
|---|---|
 |
 |
| 3D 4-Link Frame 0 | 3D 4-Link Frame 140 |
|---|---|
 |
 |
If animation recording is not selected, then during 2D link chain animation the user can move the cursor to a location within the drawing area and press the middle mouse button to interrupt IK solving and place the target at the picked location. The link chain end-effector will then be directed toward intercepting the target as it moves from its new location. For non-recorded 3D link chain animation, pressing the middle mouse button causes the target to move to a randomly generated position -- left and right button presses combined with mouse motion will rotate, zoom and pan the 3D view space as determined by the Matplotlib figure manager and backend renderer. IK solving and link chain animation will stop when one of the following conditions occurs:
- the end-effector reaches the target (within 4% of the effector's length),
- it's determined the end-effector cannot reach the target, or
- 30 seconds has elapsed.
Closing the graphic animation window will terminate processing and the program will exit.
The IK_Solver program can be executed in two different configurations, as a single executable program, or as client/server programs.
-
To invoke as a single program, execute the following command in a terminal window.
python IK_Solver.py $1 $2 $3
where the command line arguments $1, $2 and $3 can be as follows.
$1 - The IK solver method option [1,2,3,4,5,6,7] where:
1 = Cyclic Coordinate Descent (CCD) 2 = Jacobian Transpose Method (JTM) 3 = Pseudo-inverse Jacobian method 2 (PIM2) 4 = Pseudo-inverse Jacobian method 3 (PIM3) 5 = Damped Least Squares (DLS) 6 = PIM3 solver with null space control 7 = DLS solver with null space control$2 - The reference frame and plotting mode (0=2D, 1=3D).
$3 - The animation recording switch (0=Off, 1=On). Note that animation recording requires ffmpeg or avconv.
-
To invoke as a client/server programs, first start the server program in a terminal window using the following command.
python IK_Solver_server.py
Next, start the client program in another terminal window using the command:
python IK_Server_client.py $1 $2 $3
where the command line arguments are the same as those presented above for the single executable program.
The n-link chain is defined in the IK_Solver_nlink.py file using displacement and rotation direction vectors, and not with Denavit-Hartenberg (DH) parameters. The target's initial position and fixed velocity are hard-coded within animate2D and animate3D functions in IK_Solver.py, and as IK_solver class attributes et0 and vt0 respectively in the IK_Solver_class.py file. For a 2D case, the pseudo-inverse null space may be used to coerce the orientation of the end-effector link segment to be pointing in the +X direction for the PIM3 and DLS methods. Similarly for the 3D case, the null space may be used to coerce the end-effector link segment to be pointing in the +X direction.
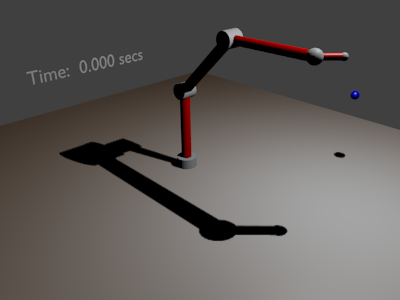
The utility of the IK_Solver client/server configuration will become apparent when it's demonstrated how IK_Solver can be used to drive an armature skeleton rigged 3D model of a robotic manipulator arm in Blender! See README.txt file under the ./Blender/FourLink3D subdirectory for instructions on using Blender 2.74 to animate the representative 3D 4-Link robotic manipulator arm illustrated in Matplotlib stick figure images above and as shown in Blender rendered images below. Clicking on the rendered images will link to a YouTube video or animated GIF image depicting robotic arm motion from initial pose (frame 0) to target intercept (frame 97).
| Blender Rendered 3D 4-Link Frame 0 | Blender Rendered 3D 4-Link Frame 97 |
|---|---|
 |
 |
| Blender OpenGL Render 3D 4-Link Frame 0 | Blender OpenGL Render 3D 4-Link Frame 97 |
|---|---|
 |
 |
- The interactive feature of the program is disabled when animation recording is selected. If frame images are saved after each figure drawing update, then the interactive feature may not have to be deactivated and a video could be assembled from the sequence of saved images as a post-process.
- The name and location of the saved video file is not currently a user specifiable option.
- Instead of the target velocity being hard coded, it could be generated by a parametric function or read from a trajectory file.
- Animation functions in IK_Solver.py and IK_Solver_client.py could be consolidated into a class to eliminate duplicative code.
- Enhancements to target intercept prediction could include earliest possible intercept, and smoothing and filtering to reduce prediction error.
- Python logging could be used instead of verbose print statements being manually uncommented/commented for debug, test and operational phases of the program's development and maintenance.
[1] Benjamin Kenwright, "Practical 01: Inverse Kinematics", September
2014, School of Computer Science, Edinburgh Napier University,
United Kingdom, Physics-Based Animation practical web available at
https://games.soc.napier.ac.uk/study/pba_practicals/Practical%2001%20-%20Inverse%20Kinematics.pdf
(2016 publication: https://github.com/edinburgh-napier/set09119/blob/master/workbook.pdf)
[2] Ben Kenwright, "Real-Time Character Inverse Kinematics using the Gauss-Seidel Iterative Approximation Method", July 2012, CONTENT 2012, The Fourth International Conference on Creative Content Technologies, web available at https://www.thinkmind.org/index.php?view=article&articleid=content_2012_4_10_60013
[3] Samuel R. Buss, "Introduction to Inverse Kinematics with Jacobian Transpose, Pseudoinverse and Damped Least Squares methods", October 2009, Department of Mathematics, University of California, San Diego, unpublished article web available at https://www.math.ucsd.edu/~sbuss/ResearchWeb/ikmethods/iksurvey.pdf
These reference documents are provided in the ./refs subdirectory in the event their associated web links are broken. For additional reference information, software, demos and tutorials on physics-based animation, inverse kinematics and 3D computer graphics see Ben Kenwright's XBDEV.NET website, Edinburgh Napier University Games Development Resources, and Sam Buss's Publications and Other Research web page.
- See the file DISCLAIMER
Python purists and the omnipotent PEP 8 style and naming conventions enforcement agents will no doubt take extreme umbrage to the IK_Solver program source code. For those grown accustomed to using IDEs with GUIs, editors with color and layout schemes, automated code inspection and refactoring, computers with wide screen high-def monitors, gigabytes of memory and storage, and gigahertz CPUs/GPUs, I present the user interface of my early programming experience.
Electromechanical typing and only 80 characters; tabbing, spacing and verbose statements were a luxury, not a necessity. And no, that's not me or my dad in the YouTube video presented when you click on the Hollerith card image.
The IK_Solver program's primary role is as a simple demonstration and learning tool for inverse kinematic algorithms, animated graphics and client/server communication. It is not intended to be representative of commercial software engineering practices. With the aforementioned capabilities and features of modern software development platforms, users of IK_Solver are well equipped to tailor the source code to their needs and whims.
Respectfully,
Gary E. Deschaines