A4988, DRV8825 and generic two-pin stepper motor driver library. Currently supported:
- DRV8834 Low-Voltage Stepper Motor Driver up to 1:32
- A4988 Stepper Motor Driver up to 1:16
- DRV8825 up to 1:32
- any 2-pin stepper via DIR and STEP pins.
4-wire bipolar stepper motor or some 6-wire unipolar in 4-wire configuration (leaving centers out).
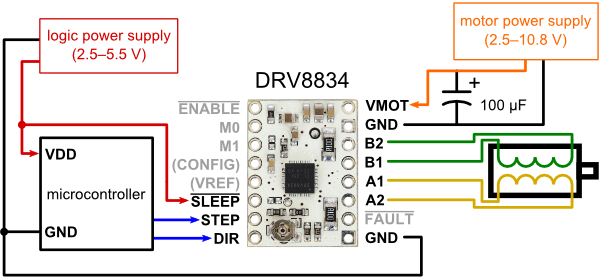
Minimal configuration from Pololu DRV8834 page:
-
Arduino to driver board:
- DIR - D8
- STEP - D9
- SLEEP - HIGH (Vdd)
- GND - Arduino GND
- GND - Motor power GND
- VMOT - Motor power (check driver-specific voltage range)
- A4988/DRV8825 microstep control
- MS1/MODE0 - D10
- MS2/MODE1 - D11
- MS3/MODE2 - D12
- DRV8834 microstep control
- M0 - D10
- M1 - D11
- ~ENABLE (optional) recommend D13 to visually check if coils are active
-
driver board to motor (this varies from motor to motor, check motor coils schematic). I just list the motor wires counter-clockwise
- A1 - RED
- A2 - GRN
- B1 - YEL
- B2 - BLU
-
100uF capacitor between GND - VMOT
-
Set the max current on the driver board to the motor limit (see below).
-
Have a motor power supply that can deliver that current.
The max current is set via the potentiometer on board. Turn it while measuring voltage at the passthrough next to it. The formula is V = I5R where I=max current, R=current sense resistor installed onboard
-
DRV8834 Pololu board, R=0.1 and V = 0.5 * max current(A). For example, for 1A you will set it to 0.5V.
-
DRV8825 low-current board, R=0.33 and V = 1.65 * max current(A). For example, for 0.5A the reference voltage should be 0.82V
See the BasicStepperDriver example for a generic driver that should work with any board supporting the DIR/STEP indexing mode.
The Microstepping example works with a DRV8834 board.
For example, to show what is possible, here is the ClockStepper example that moves a stepper motor like the seconds hand of a watch:
#include <Arduino.h>
#include "A4988.h"
// using a 200-step motor (most common)
// pins used are DIR, STEP, MS1, MS2, MS3 in that order
A4988 stepper(200, 8, 9, 10, 11, 12);
void setup() {
// Set target motor RPM to 1RPM
stepper.setRPM(1);
// Set full speed mode (microstepping also works for smoother hand movement
stepper.setMicrostep(1);
}
void loop() {
// Tell motor to rotate 360 degrees. That's it.
stepper.rotate(360);
}- Arduino-compatible board
- A stepper motor driver, for example DRV8834, DRV8825, DRV8824, A4988.
- A Stepper Motor.
- 1 x 100uF capacitor
For DRV8834, if 1:4 and 1:32 microstepping modes do not work, add a 470K resistor from M0 to GND.