The following readme gives a short introduction on how to use the docker container on Linux and on Windows.
Note that it is not possible to communicate with other hosts (e.g. Turtlebot) via wifi nor lan if you use docker on Windows.
- Install docker (here are the instructions: Ubuntu Windows )
- Copy the downloaded files to a destination of your choice. e.g. ~/Documents/Docker/FHTW/
- Install VcXsrv as X11-Server: link
Make sure that you allow VcXsrv access to public and private networks
- Now you can either build the container from source or pull it from the docker hub (recommended).
- Build locally:
docker build -t "fhtw/ros-noetic:latest" --rm .- Use the image on the docker hub:
docker pull georgno/fhtw-ros:latest - To start the docker container execute the following commands:
- With local build:
bash run_docker_from_local_build.sh- With hub:
bash run_docker_from_hub.sh
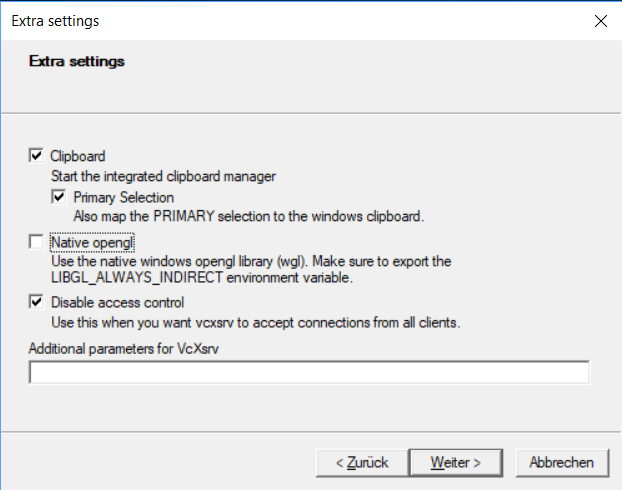
- Start VcXsrv (XLaunch) with following configuration:
- Now you can either build the container from source or pull it from the docker hub
- Build:
- Navigate to the downloaded folder using file explorer
- Double klick on build_docker_container.bat
- Pull:
docker pull georgno/fhtw-ros:latest
- Build:
- To start the docker container double klick on either run_docker_from_hub.bat or run_docker_from_local_build.bat On the first start docker will ask for permissions to mount catkin_ws/src folder (for more see below).

To make it easier to develope within the docker container, create a folder "./catkin_ws/src/" (which must be located directly in the folder from which you run the run_docker_from_hub/local). This folder is mounted into the docker container to "/home/fhtw_user/catkin_ws/src/fhtw". This allows you to save your projects on your host computer and execute them in the docker container.
If you want to work with a IDE we recommand to use Visual Studio Code and the following plugins:
- Remote Development (ms-vscode-remote.vscode-remote-extensionpack)
- ROS (ms-iot.vscode-ros)
- C++ Intellisense (austin.code-gnu-global)
Further to work with multiple terminals inside docker we recommend using tmux which is set as the default shell.
To store changes (such as newly installed software) you need to commit these changes from your command line (we recommand powershell for windows and the normal terminal for linux).
# docker commit [CONTAINER_ID] fhtw_ros_local:latest -m "Commit message"