{kind=link}

A Python implementation of a Morse code translator. Uses a Raspberry Pi to encode text into Morse Code which is flashed by an LED. A second computer with a webcam is then used to decode the LED flashes into human-readable text. Written by Alex Todd and Jake Broughton
- Connect an LED to GPIO 18 on the Raspberry Pi.
- Connect a 470\ohm resistor between the LED's ground pin and ground on the Raspberry Pi
- Ensure
TextToLights.pyandmorse_function.pyis on the Rasberry Pi and the rest of the files are on a computer with a webcam.
-
Run
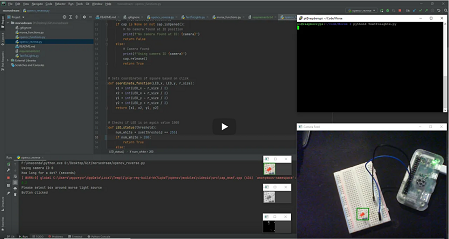
opencv_reverse.py, which will bring up a video feed from the computer's primary webcam. It will askhow long for a dot?. This question is also asked by the script ran on the Raspberry Pi, and need to be consistent. A value of 0.2 seconds is reasonable. -
Place the LED in view of the camera feed, then double click the LED to place a green box around it. Three smaller windows will pop up, showing the cropped video, greyscale video and video with threshold applied.
-
You may need to adjust the threshhold value in the code. The threshold video feed should be almost entirely black.

-
Log into the Raspberry Pi and run
TextToLights.py. Enter the same dot time length as entered in step 1 when prompted. Enter a phrase to translate when prompted, and hit enter. -
Once
TextToLights.pyhas finished running, closeopencv_reverse.py, which will return the translated phrase entered in step 4.
Requirements listed in requirements.txt are as follows:
- opencv-python~=4.5.1.48
- numpy~=1.20.1