Approach to fix a MixFeeder
Toursteuerung eines Fütterungsroboters
- https://raspberryautomation.com/raspberry-pi-relay-module-via-gpio/
- https://dev.to/tardisgallifrey/raspberry-pi-gpio-4-ways-45do
- https://projects-raspberry.com/introduction-to-accessing-the-raspberry-pis-gpio-in-c-sysfs/
- https://www.youtube.com/watch?v=Uq7fkcl6PWs
- https://mklimenko.github.io/english/2016/07/08/managing-threads-qt-en/
- https://howchoo.com/g/ndy1zte2yjn/how-to-set-up-wifi-on-your-raspberry-pi-without-ethernet
- Raspberry OS über Etcher auf SD-Karte
wget https://downloads.raspberrypi.org/raspios_armhf/images/raspios_armhf-2020-12-04/2020-12-02-raspios-buster-armhf.zip
- WLAN-Einstellungen auf OS setzen, falls kein Bildschirm vorhanden
- On SD card:
cd boot sudo nano wpa_supplicant.conf
country=DE
ctrl_interface=DIR=/var/run/wpa_supplicant GROUP=netdev
network={
ssid="<Network name>"
psk="<password>"
key_mgmt=WPA-PSK
}
- Qt installieren
sudo apt-get updatesudo apt-get upgradesudo apt-get install qt5-defaultsudo apt-get qtcreatorsudo qtcreator
- Raspberry-Gerät erstellen für die Kompillierung
- Tools -> Options -> Devices -> Devices -> Add -> Generic Linux Device
- Kits -> Add
- Code von GitHub klonen
git clone https://github.com/PaulOberm/imboccaTauro.git
- Öffnen der .pro-Datei im QtCreator
- Testschaltung aufbauen
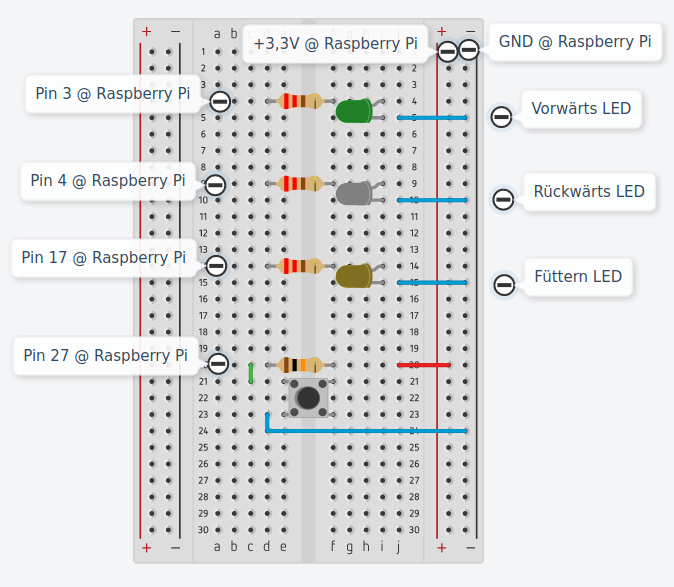

- GPIO @ Raspberry PI: https://www.raspberrypi.org/documentation/usage/gpio/
- Kompilieren auf Raspberry
- Ausführen
./FeederBlinkDemo
- 2 Not-Aus
- 1 Waage
- 1 Sensor für Klappe
- Stopp
- 2 Markörsensoren
- 4 - 8 Relais für Futtertypen
- 1 Relais für Mischmotor
- 1 Relais für Klappe
- 2 Relais für Antriebsmotor
- 1 Näherungsschalter Antriebswelle
- Je 3 Kontakte
- Temperaturabhängige Gewichtssteuerung (hohe Temperatur -> weniger Futter)
- Antrieb ohne gleichzeitige Positionsänderung (ohne Marköre) -> Störung (Indoor-Positionstechnologien?)
- Beidseitiges Auswerfen bzw. Steuerung der Auswerfrichtung