Download and unzip this repository to your preffered location.
Or,
Run the following commands to download this repository to the desktop
Run the following commands first in terminal to update and upgrade rpi packages and version
sudo apt-get update
sudo apt-get upgradeNext thing to do is to install the Arduino IDE by entering the command in the terminal.
sudo apt-get install arduinoNow open the Arduino IDE from the main menu option of the Raspberry Pi.

To install the library with Library Manager, open Arduino IDE and then go to Sketch > Include Library > Manage Libraries. Make sure your computer is connected to the internet.
To install QMC5883LCompass library, search QMC5883LCompass on Library Manager and install version 1.1.1 by MRPrograms
Python should be installed by default on raspberry pi, if not we will install Python3 using the following command in the terminal:
sudo apt-get install python3Now, install the pip module which is required to install the packages in Python3. So we use the following command for installation:
sudo apt install python3-pipNow we are done with python setup and start with the package installation
- Install
pyserialby following command
sudo pip3 install pyserial- Install
BeautifulSoupby following command
sudo pip3 install beautifulsoup4-
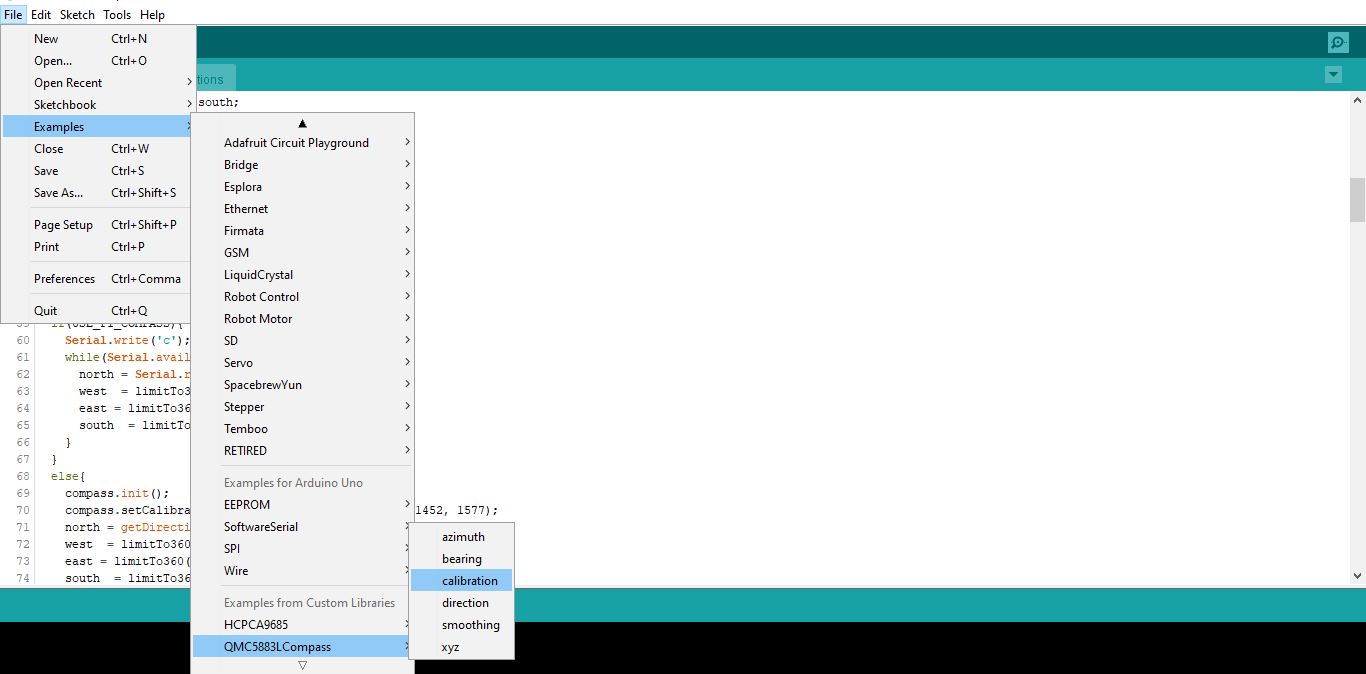
Open Aduino IDE and go to File > Examples > QMC5883LCompass and open calibration sketch.
-
Upload the sketch and open serial monitor to follow instrctions there to get a set of values. Copy that beforehand.
-
Open V2(BoundaryWires) > arduinoFirmware > arduinoFirmware.ino
-
Search for the line
compass.setCalibration -
Relace these values here with values copied values from serial monitor.



- Open V2(BoundaryWires) > testBoundaryWires > testBoundaryWires.ino
- Upload the sketch and open serial monitor to checkout values received while sensors are on boundary wire and not.
- Make best guess to find a threshold value that seperats those states.
- Relace new thresholod value on arduinoFirmware.ino


Upload arduinoFirmware.ino and you will be good to go...