This is a Linux kernel-mode driver, intended as an enhancement/substitution
of the standard Linux w1-gpio 1-wire bus master driver. Contrary to
the standard driver, w1-gpio-cl is not a platform device driver, therefore
doesn't need any specific device-tree overlay nor preconfigured kernel (except
usual 1-wire support via the wire module). Moreover, there is possible
coexistence between w1-gpio and w1-gpio-cl, provided no GPIOs conflict
exists.
w1-gpio-cl is fully configured via its command line parameters while loading
the driver. The configuration allows to launch many 1-wire bus masters
controlling different GPIO pins. For parasite powering support, it is
possible to choose the type of the strong pull-up to be used.
General configuration syntax is:
modprobe w1-gpio-cl m1="gdt:num[,od][,bpu|gpu:num[,rev]]" [m2="..." ...]
NOTE: : and , syntax tokens may be replaced by = and ; respectively,
so m1="gdt:4,od" is equivalent to m1="gdt:4;od", m1="gdt=4,od" or
m1="gdt=4;od".
m1, m2, ... mN - configure up to N (where N=5 for the standard module
compilation) bus masters, each one controlling different 1-wire bus connected
to its GPIO pin (specified in gdt). At least one bus master specification
(that is m1) must be provided. It's worth to note, the X index in mX
parameter specifies an order in which bus masters are registered in the 1-wire
subsystem. The index doesn't need to correspond to the bus master id assigned
by the kernel.
Each of bus master configurations consist of set of parameters listed below:
-
gdt- specifies GPIO number associated with the 1-wire data wire (the 1-wire bus). This parameter is obligatory for each bus master specification. -
od- if specified, the data wire GPIO (gdt) is of an open drain type. This parameter is deprecated and its support has been removed for kernels >= v6.5. -
bpu- if specified, parasite powering is enabled via the data wire strong pull-up bit-banging. This type of strong pull-up is possible only for non open-drain type of the data wire GPIO (gdt). -
gpu- specifies GPIO number used for controlling strong pull-up for parasite powering. The GPIO is working in the output mode and is set to the low state if the strong pull-up is active, and to the high state otherwise.The strong pull-up controlled by the
gpuGPIO is the only possibility for an open-drain type of the data wire GPIO (gdt). In this case thegpuGPIO may be connected to a P-channel MOSFET gate controlling theVccstrong pull-up as presented on the following figure.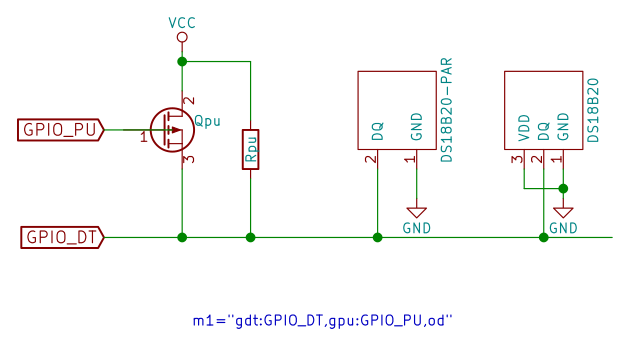
NOTE: In place of the MOSFET it's possible to use a PNP bipolar transistor with its emitter connected to
Vcc, collector to the data wire and base to the controlling GPIO (gpu). Current reducing resistor shall be placed between the transistor's base andgpupin. -
rev- if specified and thegpuparameter is provided, thegpuGPIO logic is reversed for the strong pull-up activation: GPIO in the high state if the strong pull-up is active, low state - otherwise.

NOTE: Strong pull-up along with parasite powering support is effectively disabled
if no bpu nor gpu is specified.

In this example, there have been configured three bus masters:
-
1st one on GPIO1 controlling non-parasitically powered thermometers.
-
2nd one on GPIO2 controlling parasitically powered thermometers. Strong pull-up is performed via the data wire bit-banging (non open-drain data GPIO).
-
3nd one devoted to handle iButton reader(s) only. Using separate 1-wire bus in this case is justified by the performance reason. The iButton bus is empty for most of its time, and is scanned/searched much more often than other buses for presence of authorized iButtons existence.
NOTE: GPIO1, GPIO2, GPIO3 are numbers specifying actual GPIO pins.
The driver module may be compiled directly on the target machine or cross-compiled and the result to be copied into the target machine. If you are not familiar with the Linux kernel building process please refer to this link first. It provides good introduction to the topic of kernel compilation/cross-compilation for Raspberry Pi boards.
Prerequisites
-
Building tool-set.
-
For compilation on the target machine Linux kernel building tools may be installed by (for Debian based systems):
sudo apt-get install build-essential bc bison flex libssl-dev -
For cross-compilation appropriate target system tool-chain need to be installed on the compiling machine (e.g. package
crossbuild-essential-armhffor 32-bit orcrossbuild-essential-arm64for 64-bit ARM). Remaining tools to be installed on the compiling machine:sudo apt-get install make bc bison flex libssl-dev
-
-
Kernel headers and
kbuildscripts corresponding to the target kernel.-
For compilation on the target machine the required headers may be installed by:
sudo apt-get install linux-headers-KERNEL_RELEASEwhere
KERNEL_RELEASEcorresponds to the kernel release version on the target (to be checked byuname -r). In case the package repository contains kernel headers corresponding to the current kernel image the following command will install appropriate headers on the target machine:sudo apt-get install linux-headers-`uname -r`In case the target's system package repository doesn't contain kernel headers package in a required version (usually the case for Raspberry Pi Raspbian OS) there is a need to use kernel sources as described in the subsequent point.
-
For cross-compilation it's recommended to use Linux kernel sources corresponding to the kernel version installed on the target machine. The kernel sources need to be prepared via proper configuration and
modules_prepareas follows (launched from the kernel sources directory on the compiling machine):ARCH=... CROSS_COMPILE=... make CONFIG_TARGET modules_preparewhere
CONFIG_TARGETis a specific kernel target configuration (e.g. for Raspberry Pi boards the configuration shall be set tobcmrpi_defconfig,bcm2709_defconfig,bcm2711_defconfigorbcmrpi3_defconfigdepending on the platform version).ARCHandCROSS_COMPILEare required to indicate target architecture and cross-compiling tool-chain.NOTE 1: When using kernel sources while compiling on the target machine, there is no need to set
ARCHandCROSS_COMPILE, since the local tool-set is used for compilation.NOTE 2: When compiling for Raspberry Pi,
search_kernel_commit.shscript may be used to find commit on the official RPi kernel repository for target's kernel version.
-
Compilation
General compilation command syntax is as follows (launched from the w1-gpio-cl
project directory):
[KERNEL_SRC=...] [ARCH=...] [CROSS_COMPILE=...] [CONFIG_W1_MAST_MAX=...] make
The result is w1-gpio-cl.ko driver module located in the project directory.
All compilation definitions (KERNEL_SRC, ARCH, ...) are optional, with the
following meaning:
-
KERNEL_SRC: specifies kernel sources directory in case they are used instead of the pre-installed kernel headers (see above). -
ARCH,CROSS_COMPILE: are used for module cross-compilation exactly as for the Linux kernel. -
CONFIG_W1_MAST_MAX: by default the module is compiled to support up to 5 bus masters. This may be changed by setting this definition.
Installation
If the module was compiled on the target machine it's possible to install it into the destination directory by:
sudo make install
and uninstall by:
sudo make uninstall
If the module was cross-compiled, copy w1-gpio-cl.ko module into its destination
location on the target machine (/lib/modules/KERNEL_RELEASE/kernel/drivers/w1/masters)
and remake the kernel modules dependencies by sudo depmod.
Loading
sudo modprobe w1-gpio-cl MODULE_CONFIG
where the MODULE_CONFIG specifies 1-wire bus master(s) configuration as
described above.
If you need to load the module automatically create the following files:
/etc/modules-load.d/w1-gpio-cl.confwith content:
w1-gpio-cl
/etc/modprobe.d/w1-gpio-cl.confwith content:
options w1-gpio-cl MODULE_CONFIG
where the MODULE_CONFIG specifies 1-wire bus master(s) configuration.
DKMS
The module may be installed as part of DKMS
system. To install w1-gpio-cl as DKMS module launch the following commands
from the module source directory:
sudo dkms add .
sudo dkms install w1-gpio-cl/MODULE_VER
where MODULE_VER denotes module version. From now any kernel updates on the
target machine will precompile w1-gpio-cl module accordingly.
GNU GENERAL PUBLIC LICENSE v2. See LICENSE file for details.