JP7520262B2 - Elevator emergency stop device - Google Patents
Elevator emergency stop device Download PDFInfo
- Publication number
- JP7520262B2 JP7520262B2 JP2023580049A JP2023580049A JP7520262B2 JP 7520262 B2 JP7520262 B2 JP 7520262B2 JP 2023580049 A JP2023580049 A JP 2023580049A JP 2023580049 A JP2023580049 A JP 2023580049A JP 7520262 B2 JP7520262 B2 JP 7520262B2
- Authority
- JP
- Japan
- Prior art keywords
- movable member
- guide rail
- eccentric roller
- emergency stop
- operating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003213 activating effect Effects 0.000 claims description 2
- 238000012806 monitoring device Methods 0.000 description 11
- 230000002093 peripheral effect Effects 0.000 description 9
- 230000001133 acceleration Effects 0.000 description 7
- 238000004080 punching Methods 0.000 description 5
- 239000000725 suspension Substances 0.000 description 5
- 238000013459 approach Methods 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 239000006096 absorbing agent Substances 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000035939 shock Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
- B66B5/16—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well
- B66B5/18—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well and applying frictional retarding forces
- B66B5/22—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well and applying frictional retarding forces by means of linearly-movable wedges
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
Description
本開示は、エレベータの非常止め作動装置に関するものである。 This disclosure relates to an elevator emergency stop operating device.
従来のエレベータの停止装置では、昇降体の過大速度での落下が検知部によって検知されると、アクチュエータが駆動され、一対の小楔片が引き上げられる。これにより、レールに対する一対の小楔片の移動が抑制される。この状態から昇降体がさらに落下すると、一対の連結部を介して、一対の楔片が引き上げられ、昇降体が停止する(例えば、特許文献1参照)。In conventional elevator stopping devices, when a detector detects that a moving body is falling at an excessive speed, an actuator is driven and a pair of small wedge pieces are pulled up. This prevents the pair of small wedge pieces from moving against the rail. If the moving body falls further from this state, the pair of wedge pieces are pulled up via a pair of connecting parts, and the moving body is stopped (see, for example, Patent Document 1).
上記のような従来のエレベータの停止装置では、昇降体を停止させた後の停止装置の復帰動作のために、アクチュエータの容量を大きくする必要があった。 In conventional elevator stopping devices such as those described above, it was necessary to increase the actuator capacity in order to restore the stopping device after stopping the lifting body.
本開示は、上記のような課題を解決するためになされたものであり、アクチュエータを小容量化することができるエレベータの非常止め作動装置を得ることを目的とする。 This disclosure has been made to solve the problems described above, and aims to provide an elevator emergency stop operating device that can reduce the capacity of the actuator.
本開示に係るエレベータの非常止め作動装置は、ガイドレールに沿って昇降する昇降体に設けられており、第1通常位置と第1作動位置との間で変位可能な第1可動部材、第1ローラ軸を中心として第1順方向と第1逆方向とに回転可能に第1可動部材に設けられており、ガイドレールに接触しているとき、昇降体の昇降に伴ってガイドレールに接触しながら回転する第1偏心ローラ、第1偏心ローラに連結されており、第1偏心ローラがガイドレールに接触しながら第1順方向に回転することにより引き上げられ、非常止め装置を作動させる引き上げ棒、第1作動位置に変位させる力を第1可動部材に付与している作動ばね装置、及び非常止め装置の非作動時に作動ばね装置に抗して第1可動部材を第1通常位置に保持し、非常止め装置を作動させる作動指令信号に応じて、第1通常位置への第1可動部材の保持を解除するアクチュエータを備え、第1ローラ軸は、第1偏心ローラの中心からずれた位置に位置しており、作動指令信号に応じてアクチュエータによる第1可動部材の保持が解除されると、作動ばね装置によって第1可動部材が第1通常位置から第1作動位置に変位して、第1偏心ローラがガイドレールに接触し、昇降体の下降による第1順方向への第1偏心ローラの回転によって、引き上げ棒が引き上げられるとともに、作動ばね装置に抗して第1可動部材が第1通常位置側に戻される。The elevator emergency stop operating device according to the present disclosure comprises a first movable member provided on a lifting body that rises and falls along a guide rail and displaceable between a first normal position and a first operating position, a first eccentric roller provided on the first movable member so as to be rotatable in a first forward direction and a first reverse direction about a first roller axis and which, when in contact with the guide rail, rotates while in contact with the guide rail as the lifting body rises and falls, a lifting rod connected to the first eccentric roller and is pulled up as the first eccentric roller rotates in the first forward direction while in contact with the guide rail, thereby operating the emergency stop device, an operating spring device that applies a force to the first movable member to displace it to the first operating position, and a spring for the emergency stop device The actuator holds the first movable member in a first normal position against the operating spring device when not in operation, and releases the first movable member from the first normal position in response to an operation command signal that activates the emergency stop device, and the first roller shaft is positioned at a position offset from the center of the first eccentric roller.When the actuator releases the hold of the first movable member in response to the operation command signal, the operating spring device displaces the first movable member from the first normal position to the first operating position, causing the first eccentric roller to contact the guide rail, and the lifting rod is pulled up by the rotation of the first eccentric roller in the first forward direction due to the descent of the lifting body, and the first movable member is returned to the first normal position against the operating spring device.
本開示のエレベータの非常止め作動装置によれば、アクチュエータを小容量化することができる。 According to the elevator emergency stop operating device disclosed herein, the actuator capacity can be reduced.
以下、実施の形態について、図面を参照して説明する。
実施の形態1.
図1は、実施の形態1によるエレベータを示す構成図である。図において、昇降路1の上には、機械室2が設けられている。機械室2には、巻上機3、そらせ車4、制御装置5、及び安全監視装置6が設置されている。
Hereinafter, embodiments will be described with reference to the drawings.
Embodiment 1.
Fig. 1 is a configuration diagram showing an elevator according to embodiment 1. In the figure, a
巻上機3は、駆動シーブ7、図示しない巻上機モータ、及び図示しない巻上機ブレーキを有している。巻上機モータは、駆動シーブ7を回転させる。巻上機ブレーキは、駆動シーブ7の静止状態を保持する。また、巻上機ブレーキは、駆動シーブ7の回転を制動する。The
駆動シーブ7及びそらせ車4には、懸架体8が巻き掛けられている。懸架体8としては、複数本のロープ、又は複数本のベルトが用いられている。懸架体8の第1端部には、かご11が接続されている。懸架体8の第2端部には、釣合おもり12が接続されている。A
かご11及び釣合おもり12は、懸架体8により昇降路1内に吊り下げられている。また、かご11及び釣合おもり12は、駆動シーブ7を回転させることにより昇降路1内を昇降する。The
制御装置5は、巻上機3を制御することにより、設定された速度でかご11を昇降させる。安全監視装置6は、かご11の速度が過大速度に達していないかどうかを監視する。また、安全監視装置6は、かご11の加速度が過大加速度に達していないかどうかを監視する。安全監視装置6には、過大速度及び過大加速度が予め設定されている。制御装置5の機能及び安全監視装置6の機能は、それぞれコンピュータにより実現することができる。
The
昇降路1内には、一対のかごガイドレール13、及び一対の釣合おもりガイドレール14が設置されている。図1では、1つのかごガイドレール13及び1つの釣合おもりガイドレール14のみが示されている。A pair of
一対のかごガイドレール13は、かご11の昇降を案内する。即ち、かご11は、一対のかごガイドレール13に沿って昇降する。実施の形態1における昇降体は、かご11である。The pair of
一対の釣合おもりガイドレール14は、釣合おもり12の昇降を案内する。即ち、釣合おもり12は、一対の釣合おもりガイドレール14に沿って昇降する。The pair of
昇降路1の底部には、かご緩衝器15及び釣合おもり緩衝器16が設置されている。
A car shock absorber 15 and a
かご11の下部には、非常止め装置17が設けられている。非常止め装置17は、一対のかごガイドレール13を把持してかご11を非常停止させる。An
安全監視装置6は、かご11の速度が過大速度に達した場合、及びかご11の加速度が過大加速度に達した場合、作動指令信号を発生する。作動指令信号は、非常止め装置17を作動させる信号である。The
かご11には、非常止め作動装置30が搭載されている。非常止め作動装置30は、作動装置本体31と、引き上げ棒32とを有している。The
作動装置本体31は、かご11の上部に設置されている。また、作動装置本体31は、安全監視装置6からの作動指令信号に応じて、引き上げ棒32を引き上げ、非常止め装置17を作動させる。The operating device
引き上げ棒32の上端は、作動装置本体31に連結されている。引き上げ棒32の下端は、非常止め装置17に連結されている。The upper end of the
図2は、図1の非常止め装置17の概略の構成を示す正面図である。非常止め装置17は、作動レバー18、連動レバー19、連結棒20、第1把持部21、及び第2把持部22を有している。
Figure 2 is a front view showing the schematic configuration of the
作動レバー18は、作動レバー軸18aを中心として回転可能である。引き上げ棒32の下端は、作動レバー18に回転可能に連結されている。連動レバー19は、連動レバー軸19aを中心として回転可能である。The
連結棒20は、作動レバー18及び連動レバー19にそれぞれ回転可能に連結されている。また、連結棒20は、作動レバー18の回転を連動レバー19に伝達し、連動レバー19を作動レバー18に連動して回転させる。このとき、連動レバー軸19aに対する連動レバー19の回転方向は、作動レバー軸18aに対する作動レバー18の回転方向とは反対である。The connecting
引き上げ棒32が引き上げられることにより、作動レバー18は図2の反時計方向へ回転し、連動レバー19は図2の時計方向へ回転する。When the lifting
作動レバー18は、第1把持部21に接続されている。第1把持部21は、作動レバー18が図2の反時計方向へ回転することにより、一対のかごガイドレール13のうちの一方を把持する。The operating
連動レバー19は、第2把持部22に接続されている。第2把持部22は、連動レバー19が図2の時計方向へ回転することにより、一対のかごガイドレール13のうちの他方を把持する。The interlocking
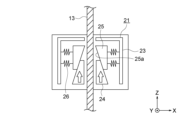
図3は、図2の第1把持部21を示す正面図であり、非常止め装置17の非作動時の状態を示している。図4は、非常止め装置17の作動時における第1把持部21を示す正面図である。なお、第2把持部22の構成は、第1把持部21と同様である。
Figure 3 is a front view showing the first gripping
第1把持部21は、枠23、一対の楔部材24、一対の楔ガイド25、及び複数の楔ガイドばね26を有している。The first gripping
一対の楔部材24は、対応するかごガイドレール13にそれぞれ対向している。各楔ガイド25には、傾斜面25aが設けられている。傾斜面25aは、上方へ行くに従ってかごガイドレール13に近付いている。A pair of
各楔部材24は、対応する楔ガイド25の傾斜面25aに沿って、枠23に対して上下動可能である。複数の楔ガイドばね26は、枠23と一対の楔ガイド25との間に設けられている。Each
通常時には、一対の楔部材24は、図3に示すように、対応するかごガイドレール13に隙間を介して対向している。これに対して、非常止め装置17の作動時には、引き上げ棒32によって、一対の楔部材24が同時に引き上げられる。このとき、各楔部材24は、対応する傾斜面25aに案内されてかごガイドレール13に近付いて行き、かごガイドレール13に接触する。3, under normal circumstances, the pair of
一対の楔部材24がさらに引き上げられると、一対の楔部材24は、複数の楔ガイドばね26を縮めるように一対の楔ガイド25を水平方向へ押しながら上方へ移動する。かごガイドレール13と一対の楔部材24との間に発生する摩擦力は、枠23に対する一対の楔部材24の上昇量に応じて増大する。これにより、かごガイドレール13は、一対の楔部材24によって把持され、かご9が非常停止する。
When the pair of
図5は、図1の作動装置本体31を示す斜視図である。図6は、図5の作動装置本体31の要部を模式的に示す正面図である。
Figure 5 is a perspective view showing the
作動装置本体31は、支持台33、第1可動部材34、第2可動部材35、繋ぎ板36、第1偏心ローラ37、第2偏心ローラ38、第1接触部としての第1小ローラ39、第2接触部としての第2小ローラ40、作動ばね装置41、及びアクチュエータ42を有している。The operating device
支持台33は、水平部33aと、垂直部33bとを有している。水平部33aは、かご11の上部に固定されている。垂直部33bは、水平部33aから上方へ突出している。また、垂直部33bは、かごガイドレール13に対向している。垂直部33bの上端には、第1切欠33c及び第2切欠33dが設けられている。The
第1可動部材34は、第1主軸43を中心として回転可能に垂直部33bに設けられている。また、第1可動部材34は、図6に示す第1通常位置と、図7に示す第1作動位置との間で変位可能である。第1作動位置は、第1通常位置に対して傾斜した位置である。The first
第1可動部材34は、第1部分34aと、第2部分34bとを有している。第1部分34aは、第1主軸43に対して一側、この例では上側の部分である。第2部分34bは、第1主軸43に対して他側、この例では下側の部分である。The first
第1部分34aの上端は、第1切欠33cに通されている。これにより、第1可動部材34の回転範囲が規制されている。The upper end of the
第2可動部材35は、第2主軸44を中心として回転可能に垂直部33bに設けられている。また、第2可動部材35は、図6に示す第2通常位置と、図7に示す第2作動位置との間で変位可能である。第2作動位置は、第2通常位置に対して傾斜した位置である。また、第2可動部材35は、かごガイドレール13を中心として、第1可動部材34に対称に配置されている。The second
第2可動部材35は、第3部分35aと、第4部分35bとを有している。第3部分35aは、第2主軸44に対して第1部分34aと同じ側、この例では上側の部分である。第4部分35bは、第2主軸44に対して第2部分34bと同じ側、この例では下側の部分である。The second
第3部分35aの上端は、第2切欠33dに通されている。これにより、第2可動部材35の回転範囲が規制されている。The upper end of the
第1主軸43及び第2主軸44は、水平、かつ、かご11の幅方向に平行に配置されている。かご11の幅方向は、真上から見て、一対のかごガイドレール13の中心を結ぶ直線に平行な方向であり、図5のY軸に平行な方向である。The first
繋ぎ板36は、垂直部33bに対向している。また、繋ぎ板36は、第1可動部材34及び第2可動部材35に対して垂直部33bとは反対側において、第1主軸43と第2主軸44とを繋いでいる。The connecting
第1偏心ローラ37は、第1部分34aに設けられている。また、第1偏心ローラ37は、第1ローラ軸45を中心として、第1順方向と第1逆方向とに回転可能である。また、第1偏心ローラ37の形状は、円板状である。第1偏心ローラ37の外周面には、ローレット加工が施されている。これにより、第1偏心ローラ37は、かごガイドレール13に接触しているとき、かご11の昇降に伴ってかごガイドレール13に接触しながら回転する。The first
第1順方向は、かご11の下降に伴う第1偏心ローラ37の回転方向であり、図6の反時計方向である。第1逆方向は、かご11の上昇に伴う第1偏心ローラ37の回転方向であり、図6の時計方向である。The first forward direction is the rotation direction of the first
第1ローラ軸45は、第1主軸43に平行に配置されている。また、第1ローラ軸45は、第1偏心ローラ37の中心からずれた位置に位置している。The
第1偏心ローラ37には、引き上げ棒32の上端が回転可能に連結されている。引き上げ棒32は、第1偏心ローラ37の中心から離れた位置において第1偏心ローラ37に連結されている。また、引き上げ棒32は、第1偏心ローラ37がかごガイドレール13に接触しながら第1順方向に回転することにより引き上げられ、非常止め装置17を作動させる。The upper end of the lifting
第2偏心ローラ38は、第3部分35aに設けられている。また、第2偏心ローラ38は、第2ローラ軸46を中心として、第2順方向と第2逆方向とに回転可能である。また、第2偏心ローラ38の形状は、円板状である。第2偏心ローラ38の外周面には、ローレット加工が施されている。これにより、第2偏心ローラ38は、かごガイドレール13に接触しているとき、かご11の昇降に伴ってかごガイドレール13に接触しながら回転する。The second
第2順方向は、かご11の下降に伴う第2偏心ローラ38の回転方向であり、図6の時計方向である。第2逆方向は、かご11の上昇に伴う第2偏心ローラ38の回転方向であり、図6の反時計方向である。The second forward direction is the rotation direction of the second
第2ローラ軸46は、第2主軸44に平行に配置されている。また、第2ローラ軸46は、第2偏心ローラ38の中心からずれた位置に位置している。The
第2偏心ローラ38は、かごガイドレール13を中心として、第1偏心ローラ37に対称に配置されている。
The second
第2偏心ローラ38には、追加錘47が設けられている。追加錘47は、かごガイドレール13を中心として、第1偏心ローラ37における引き上げ棒32の連結位置に対称となる位置に配置されている。追加錘47は、第2偏心ローラ38に別部材として取り付けられても、第2偏心ローラ38の一部に形成されてもよい。The second
また、図5に示すように、第1偏心ローラ37には、複数の第1抜き孔37aが設けられている。これにより、第1偏心ローラ37において、複数の第1抜き孔37aが設けられている領域の質量が、複数の第1抜き孔37aが設けられていない領域の質量よりも小さくなっている。引き上げ棒32は、複数の第1抜き孔37aが設けられていない領域に連結されている。図6では、複数の第1抜き孔37aは省略されている。
As shown in Fig. 5, the first
第2偏心ローラ38には、複数の第2抜き孔38aが設けられている。これにより、第2偏心ローラ38において、複数の第2抜き孔38aが設けられている領域の質量が、複数の第2抜き孔38aが設けられていない領域の質量よりも小さくなっている。追加錘47は、複数の第2抜き孔38aが設けられていない領域に設けられている。図6では、複数の第2抜き孔38aは省略されている。The second
第1小ローラ39は、第1部分34aに設けられている。また、第1小ローラ39は、第1偏心ローラ37よりも下方に配置されている。The first
第2小ローラ40は、第3部分35aに設けられている。また、第2小ローラ40は、第2偏心ローラ38よりも下方に配置されている。第1小ローラ39と第2小ローラ40とは、上下方向の同じ位置において互いに対向している。The second
作動ばね装置41は、第2部分34bと第4部分35bとの間に設けられている。また、作動ばね装置41は、第2部分34bと第4部分35bとの間隔を押し広げる力を、第1可動部材34と第2可動部材35とに付与している。即ち、作動ばね装置41は、第1作動位置に変位させる力を第1可動部材34に付与しているとともに、第2作動位置に変位させる力を第2可動部材35に付与している。The
アクチュエータ42は、第1可動部材34と第2可動部材35との間に配置されている。また、アクチュエータ42は、非常止め装置17の非作動時に、作動ばね装置41に抗して、第1可動部材34を第1通常位置に保持するとともに第2可動部材35を第2通常位置に保持する。The
また、アクチュエータ42は、安全監視装置6からの作動指令信号に応じて、第1通常位置への第1可動部材34の保持を解除するとともに、第2通常位置への第2可動部材35の保持を解除する。
In addition, in response to an operation command signal from the
また、アクチュエータ42は、カム48と、アクチュエータ本体49とを有している。カム48は、図6に示す保持位置と、図7に示す退出位置との間で、上下方向に移動可能である。The
保持位置は、カム48が第1小ローラ39と第2小ローラ40との間に介在する位置である。カム48は、保持位置に位置しているとき、第1小ローラ39と第2小ローラ40とに挟まれている。これにより、第1可動部材34の第1作動位置への変位と、第2可動部材35の第2作動位置への変位とが規制されている。The holding position is a position where the
退出位置は、カム48が保持位置から外れた位置である。実施の形態1における退出位置は、保持位置よりも下方の位置である。カム48の上部には、上方へ行くに従って互いに近付くテーパ状の一対のカム斜面が形成されている。第1可動部材34が第1作動位置に変位し、第2可動部材35が第2作動位置に変位する際、第1小ローラ39及び第2小ローラ40は、一対のカム斜面上を転がる。
The exit position is a position where the
アクチュエータ本体49は、カム48の下方に位置している。また、アクチュエータ本体49は、保持位置と退出位置との間でカム48を移動させる。The
実施の形態1におけるアクチュエータ本体49は、ソレノイドである。アクチュエータ本体49は、通電時にカム48を保持位置に保持し、非通電時にカム48を退出位置に移動させる。The
かご11の通常運転中には、非常止め作動装置30は、図6に示す状態、即ち通常状態に保たれている。During normal operation of the
かご11の下降中に、安全監視装置6によって過大速度又は過大加速度が検出されると、安全監視装置6からアクチュエータ42に作動指令信号が送られる。そして、作動指令信号に応じて、アクチュエータ42による第1可動部材34及び第2可動部材35の保持が解除される。即ち、カム48が保持位置から退出位置に移動される。If the
これにより、図7に示すように、作動ばね装置41によって、第1可動部材34が第1通常位置から第1作動位置に変位し、第2可動部材35が第2通常位置から第2作動位置に変位する。第1偏心ローラ37及び第2偏心ローラ38は、それぞれかごガイドレール13に接触する。このとき、かごガイドレール13は、第1偏心ローラ37と第2偏心ローラ38との間に挟まれる。7, the first
図7の状態から、かご11がさらに下降すると、かご11の下降による第1順方向へ第1偏心ローラ37の回転によって、図8に示すように、引き上げ棒32が引き上げられ、非常止め装置17が作動する。
When the
また、第1ローラ軸45が第1偏心ローラ37の中心からずれた位置に位置しているため、引き上げ棒32の引き上げとともに、作動ばね装置41に抗して、第1可動部材34が第1通常位置に戻される。
In addition, since the
また、第2ローラ軸46が第2偏心ローラ38の中心からずれた位置に位置しているため、かご11の下降による第2順方向への第2偏心ローラ38の回転によって、作動ばね装置41に抗して、第2可動部材35が第2通常位置に戻される。
In addition, since the
この状態では、第1可動部材34は、アクチュエータ42によらず、第1偏心ローラ37によって第1通常位置に保持されている。また、第2可動部材35は、アクチュエータ42によらず、第2偏心ローラ38によって第2通常位置に保持されている。In this state, the first
非常止め装置17による制動状態を解除する場合、図9に示すように、カム48を退出位置から保持位置に移動させた後、かご11を上昇させる。When releasing the braking state applied by the
図9は、第1偏心ローラ37と第2偏心ローラ38とがかごガイドレール13に接触し、アクチュエータ42により、第1可動部材34が第1通常位置に保持され、第2可動部材35が第2通常位置に保持された状態を示している。この状態から、かご11が上昇すると、第1偏心ローラ37は、かごガイドレール13に接触しながら第1逆方向へ回転してかごガイドレール13から離れる。9 shows a state in which the first
かごガイドレール13から離れた後、第1偏心ローラ37は、第1偏心ローラ37自体の質量の偏りと引き上げ棒32の自重とによって、第1逆方向へさらに回転し、図6の状態に戻る。After separating from the
第2偏心ローラ38は、図9の状態からかご11が上昇すると、かごガイドレール13に接触しながら第2逆方向へ回転してかごガイドレール13から離れる。When the
かごガイドレール13から離れた後、第2偏心ローラ38は、第2偏心ローラ38自体の質量の偏りと追加錘47の荷重とによって、第2逆方向へさらに回転し、図6の状態に戻る。After leaving the
このようなエレベータの非常止め作動装置30では、第1ローラ軸45は、第1偏心ローラ37の中心からずれた位置に位置している。また、アクチュエータ42による第1可動部材34の保持が解除されると、第1偏心ローラ37がかごガイドレール13に接触する。そして、かご11の下降による第1順方向への第1偏心ローラ37の回転によって、引き上げ棒32が引き上げられるとともに、作動ばね装置41に抗して第1可動部材34が第1通常位置に戻される。In this type of elevator emergency stop operating
このため、アクチュエータ42によって第1可動部材34を第1通常位置に戻す必要がなく、アクチュエータ42を小容量化することができる。
Therefore, there is no need for the
また、第1偏心ローラ37がかごガイドレール13に接触し、第1可動部材34が第1通常位置に保持された状態から、かご11が上昇すると、第1偏心ローラ37は、第1逆方向へ回転してかごガイドレール13から離れる。そして、第1偏心ローラ37は、引き上げ棒32の自重によって第1逆方向へさらに回転する。In addition, when the first
このため、非常止め作動装置30及び非常止め装置17の復帰動作を容易に行うことができる。
This makes it easy to perform the reset operation of the emergency stop operating
また、第1可動部材34は、第1主軸43を中心として回転可能にかご11に設けられている。そして、第1作動位置は、第1通常位置に対して傾斜した位置である。このため、簡単な構成により、第1偏心ローラ37を変位させることができる。The first
また、第2可動部材35及び第2偏心ローラ38は、かごガイドレール13を中心として、それぞれ第1可動部材34及び第1偏心ローラ37に対称に配置され、それぞれ第1可動部材34及び第1偏心ローラ37と同様に動作する。
In addition, the second
このため、非常止め装置17の作動時に、かごガイドレール13に偏心荷重がかかることを抑制し、非常止め作動装置30を安定して動作させることができる。
This prevents eccentric loads from being applied to the
また、第2偏心ローラ38がかごガイドレール13に接触し、第2可動部材35が第2通常位置に保持された状態から、かご11が上昇すると、第2偏心ローラ38は、第2逆方向へ回転してかごガイドレール13から離れる。そして、第2偏心ローラ38は、第2逆方向へさらに回転する。Furthermore, when the second
このため、非常止め作動装置30及び非常止め装置17の復帰動作を容易に行うことができる。
This makes it easy to perform the reset operation of the emergency stop operating
また、第2可動部材35は、第2主軸44を中心として回転可能にかご11に設けられている。そして、第2作動位置は、第2通常位置に対して傾斜した位置である。このため、簡単な構成により、第1偏心ローラ37を変位させることができる。The second
また、第1偏心ローラ37は第1部分34aに設けられており、第2偏心ローラ38は第3部分35aに設けられている。そして、作動ばね装置41は、第2部分34bと第4部分35bとの間隔を広げる力を第1可動部材34及び第2可動部材35に付与している。このため、簡単な構成により、第1可動部材34を第1作動位置にスムーズに変位させるとともに、第2可動部材35を第2作動位置にスムーズに変位させることができる。
The first
また、カム48は、アクチュエータ本体49によって、保持位置と退出位置との間で移動される。そして、保持位置は、カム48が第1部分34aと第3部分35aとの間に介在する位置であり、退出位置は、保持位置から外れた位置である。The
このため、簡単な構成により、第1可動部材34を第1通常位置に保持しつつ、第2可動部材35を第2通常位置に保持することができる。また、簡単な構成により、第1可動部材34及び第2可動部材35の保持状態を同時に解除することができる。
Therefore, with a simple configuration, the first
また、アクチュエータ本体49は、ソレノイドである。そして、アクチュエータ本体は、通電時にカム48を保持位置に保持し、非通電時にカム48を退出位置に移動させる。このため、簡単な構成により、第1可動部材34及び第2可動部材35の保持状態を同時に解除することができる。
The
また、作動装置本体31がかご11の上部に設置されているので、非常止め作動装置30に対する保守点検作業を、かご11の上部において容易に行うことができる。
In addition, since the operating device
なお、作動装置本体31は、かご11の上部以外に設置してもよい。
The operating device
また、第1接触部及び第2接触部のそれぞれは、例えば単なる突起部であってもよい。 Furthermore, each of the first contact portion and the second contact portion may be, for example, a simple protrusion portion.
また、第1偏心ローラ37の外周面、及び第2偏心ローラ38の外周面には、それぞれローレット加工以外の滑り止め加工が施されてもよい。また、第1偏心ローラ37の外周面、及び第2偏心ローラ38の外周面は、それぞれかごガイドレール13との間の摩擦係数が高い材料により構成されてもよい。In addition, the outer peripheral surface of the first
また、第1偏心ローラ37の外周面及び第2偏心ローラ38の外周面のそれぞれにおいて、引き上げ棒32が完全に引き上げられたときにかごガイドレール13に接する部分に、低摩擦部が設けられてもよい。各低摩擦部におけるかごガイドレール13に対する摩擦係数は、各低摩擦部に隣接する部分におけるかごガイドレール13に対する摩擦係数よりも小さい。In addition, a low-friction portion may be provided on each of the outer peripheral surfaces of the first
例えば、第1偏心ローラ37の外周面及び第2偏心ローラ38の外周面にそれぞれローレット加工が施される場合、各低摩擦部は、ローレット加工を施さない部分である。For example, if the outer peripheral surface of the first
このような構成では、引き上げ棒32が完全に引き上げられた状態、即ち非常止め装置17が作動した状態において、第1偏心ローラ37及び第2偏心ローラ38とかごガイドレール13との間の摩擦力が小さく抑えられる。このため、非常止め装置17の作動後に、かご11がかごガイドレール13に対して滑っても、小さな力で、非常止め作動装置30の姿勢を容易に維持することができる。In this configuration, when the lifting
また、作動ばね装置41は、第1可動部材34を変位させる第1ばねと、第2可動部材35を変位させる第2ばねとを有していてもよい。
The
また、アクチュエータ42は、第1可動部材34と第2可動部材35とを別々に保持してもよい。
The
また、第1可動部材34は、第1通常位置と第1作動位置との間でスライドしてもよい。同様に、第2可動部材35は、第2通常位置と第2作動位置との間でスライドしてもよい。The first
また、図8では、第1可動部材34が第1通常位置に戻され、第2可動部材35が第2通常位置に戻されている。しかし、第1可動部材34は、第1通常位置側に戻されれば、必ずしも完全に第1通常位置まで戻されなくてもよい。また、第2可動部材35は、第2通常位置側に戻されれば、必ずしも完全に第2通常位置まで戻されなくてもよい。この場合も、アクチュエータ42により第1可動部材34及び第2可動部材35を変位させる量が僅かであれば、アクチュエータ42を小容量化することができる。
Also, in FIG. 8, the first
また、第2可動部材35及び第2偏心ローラ38は、省略してもよい。
In addition, the second
また、安全監視装置6は、かご11の過大速度及びかご11の過大加速度のいずれか一方のみを監視してもよい。
In addition, the
また、非常止め装置17は、機械式調速機によっても作動するように構成されていてもよい。
The
また、昇降体は、釣合おもり12であっても、かご11及び釣合おもり12の両方であってもよい。
The lifting body may be a
また、エレベータ全体のレイアウトは、図1のレイアウトに限定されるものではない。例えば、ローピング方式は、2:1ローピング方式であってもよい。 In addition, the overall layout of the elevator is not limited to the layout in Figure 1. For example, the roping system may be a 2:1 roping system.
また、エレベータは、機械室レスエレベータ、ダブルデッキエレベータ、ワンシャフトマルチカー方式のエレベータ等であってもよい。ワンシャフトマルチカー方式は、上かごと、上かごの真下に配置された下かごとが、それぞれ独立して共通の昇降路を昇降する方式である。 The elevator may also be a machine room-less elevator, a double deck elevator, a one-shaft multi-car elevator, etc. The one-shaft multi-car system is a system in which an upper car and a lower car located directly below the upper car each independently ascend and descend in a common elevator shaft.
11 かご(昇降体)、13 かごガイドレール、17 非常止め装置、30 非常止め作動装置、32 引き上げ棒、34 第1可動部材、34a 第1部分、34b 第2部分、35 第2可動部材、35a 第3部分、35b 第4部分、37 第1偏心ローラ、38 第2偏心ローラ、39 第1小ローラ(第1接触部)、40 第2小ローラ(第2接触部)、41 作動ばね装置、42 アクチュエータ、43 第1主軸、44 第2主軸、45 第1ローラ軸、46 第2ローラ軸、48 カム、49 アクチュエータ本体。 11 Cage (lifting body), 13 Cage guide rail, 17 Emergency stop device, 30 Emergency stop operating device, 32 Lifting rod, 34 First movable member, 34a First part, 34b Second part, 35 Second movable member, 35a Third part, 35b Fourth part, 37 First eccentric roller, 38 Second eccentric roller, 39 First small roller (first contact portion), 40 Second small roller (second contact portion), 41 Operating spring device, 42 Actuator, 43 First main shaft, 44 Second main shaft, 45 First roller shaft, 46 Second roller shaft, 48 Cam, 49 Actuator body.
Claims (10)
第1ローラ軸を中心として第1順方向と第1逆方向とに回転可能に前記第1可動部材に設けられており、前記ガイドレールに接触しているとき、前記昇降体の昇降に伴って前記ガイドレールに接触しながら回転する第1偏心ローラ、
前記第1偏心ローラに連結されており、前記第1偏心ローラが前記ガイドレールに接触しながら前記第1順方向に回転することにより引き上げられ、非常止め装置を作動させる引き上げ棒、
前記第1作動位置に変位させる力を前記第1可動部材に付与している作動ばね装置、及び
前記非常止め装置の非作動時に前記作動ばね装置に抗して前記第1可動部材を前記第1通常位置に保持し、前記非常止め装置を作動させる作動指令信号に応じて、前記第1通常位置への前記第1可動部材の保持を解除するアクチュエータ
を備え、
前記第1ローラ軸は、前記第1偏心ローラの中心からずれた位置に位置しており、
前記作動指令信号に応じて前記アクチュエータによる前記第1可動部材の保持が解除されると、前記作動ばね装置によって前記第1可動部材が前記第1通常位置から前記第1作動位置に変位して、前記第1偏心ローラが前記ガイドレールに接触し、前記昇降体の下降による前記第1順方向への前記第1偏心ローラの回転によって、前記引き上げ棒が引き上げられるとともに、前記作動ばね装置に抗して前記第1可動部材が前記第1通常位置側に戻されるエレベータの非常止め作動装置。 a first movable member provided on a lifting body that moves up and down along a guide rail and that is displaceable between a first normal position and a first operating position;
a first eccentric roller that is provided on the first movable member so as to be rotatable about a first roller shaft in a first forward direction and a first reverse direction, and that, when in contact with the guide rail, rotates while in contact with the guide rail in association with the elevation of the lifting body;
a lifting rod connected to the first eccentric roller, which is lifted up by the first eccentric roller rotating in the first forward direction while contacting the guide rail, thereby activating an emergency stop device;
an actuation spring device that applies a force to the first movable member to displace it to the first actuation position; and an actuator that holds the first movable member at the first normal position against the actuation spring device when the emergency stop device is not in operation, and releases the holding of the first movable member at the first normal position in response to an actuation command signal that actuates the emergency stop device,
the first roller shaft is positioned at a position offset from the center of the first eccentric roller,
When the actuator releases its hold on the first movable member in response to the operation command signal, the operating spring device displaces the first movable member from the first normal position to the first operating position, causing the first eccentric roller to contact the guide rail, and the lifting rod is pulled up by the rotation of the first eccentric roller in the first forward direction due to the descent of the lifting body, and the first movable member is returned to the first normal position against the operating spring device.
前記第1作動位置は、前記第1通常位置に対して傾斜した位置である請求項1又は請求項2に記載のエレベータの非常止め作動装置。 the first movable member is provided on the lift body so as to be rotatable about a first main shaft,
3. The emergency stop operating device for an elevator according to claim 1, wherein the first operating position is an inclined position with respect to the first normal position.
第2ローラ軸を中心として第2順方向と第2逆方向とに回転可能に前記第2可動部材に設けられており、前記ガイドレールに接触しているとき、前記昇降体の昇降に伴って前記ガイドレールに接触しながら回転する第2偏心ローラ
をさらに備え、
前記第2ローラ軸は、前記第2偏心ローラの中心からずれた位置に位置しており、
前記第2可動部材は、前記ガイドレールを中心として前記第1可動部材に対称に配置されており、
前記第2偏心ローラは、前記ガイドレールを中心として前記第1偏心ローラに対称に配置されており、
前記作動ばね装置は、前記第2作動位置に変位させる力を前記第2可動部材に付与しており、
前記アクチュエータは、前記非常止め装置の非作動時に前記作動ばね装置に抗して前記第2可動部材を前記第2通常位置に保持し、前記作動指令信号に応じて、前記第2通常位置への前記第2可動部材の保持を解除し、
前記作動指令信号に応じて前記アクチュエータによる前記第2可動部材の保持が解除されると、前記作動ばね装置によって前記第2可動部材が前記第2通常位置から前記第2作動位置に変位して、前記第2偏心ローラが前記ガイドレールに接触し、前記昇降体の下降による前記第2順方向への前記第2偏心ローラの回転によって、前記作動ばね装置に抗して前記第2可動部材が前記第2通常位置側に戻される請求項1記載のエレベータの非常止め作動装置。 a second movable member provided on the lifting body and displaceable between a second normal position and a second operating position; and a second eccentric roller provided on the second movable member so as to be rotatable about a second roller axis in a second forward direction and a second reverse direction, and when in contact with the guide rail, rotates while in contact with the guide rail in accordance with the lifting body being raised and lowered,
the second roller shaft is positioned at a position offset from the center of the second eccentric roller,
The second movable member is disposed symmetrically with respect to the first movable member with respect to the guide rail,
the second eccentric roller is disposed symmetrically to the first eccentric roller with respect to the guide rail;
the actuation spring device applies a force to the second movable member to displace it to the second actuation position;
the actuator holds the second movable member at the second normal position against the actuation spring device when the emergency stop device is not actuated, and releases the second movable member from the second normal position in response to the actuation command signal;
2. The emergency stop operating device for an elevator according to claim 1, wherein when the actuator releases its hold on the second movable member in response to the operating command signal, the operating spring device displaces the second movable member from the second normal position to the second operating position, causing the second eccentric roller to contact the guide rail, and the second movable member is returned to the second normal position against the operating spring device by the rotation of the second eccentric roller in the second forward direction due to the descent of the lifting body.
前記第1偏心ローラは、前記ガイドレールに接触しながら前記第1逆方向へ回転して前記ガイドレールから離れ、前記引き上げ棒の自重によって前記第1逆方向へさらに回転し、
前記第2偏心ローラは、前記ガイドレールに接触しながら前記第2逆方向へ回転して前記ガイドレールから離れ、前記第2逆方向へさらに回転する請求項4記載のエレベータの非常止め作動装置。 When the first eccentric roller and the second eccentric roller come into contact with the guide rail, and the lifting body rises from a state in which the first movable member is held at the first normal position and the second movable member is held at the second normal position by the actuator,
The first eccentric roller rotates in the first reverse direction while in contact with the guide rail, and separates from the guide rail, and further rotates in the first reverse direction due to the weight of the lifting rod,
5. The emergency stop operating device for an elevator according to claim 4, wherein the second eccentric roller rotates in the second reverse direction while in contact with the guide rail, separates from the guide rail, and further rotates in the second reverse direction.
前記第1作動位置は、前記第1通常位置に対して傾斜した位置であり、
前記第2可動部材は、第2主軸を中心として回転可能に前記昇降体に設けられており、
前記第2作動位置は、前記第2通常位置に対して傾斜した位置である請求項4又は請求項5に記載のエレベータの非常止め作動装置。 the first movable member is provided on the lift body so as to be rotatable about a first main shaft,
the first operating position is an inclined position relative to the first normal position,
the second movable member is provided on the lift body so as to be rotatable about a second main shaft,
6. The emergency stop operating device for an elevator according to claim 4 or 5, wherein the second operating position is a position inclined with respect to the second normal position.
前記第2可動部材は、前記第2主軸に対して、前記第1部分と同じ側の部分である第3部分と、前記第2主軸に対して、前記第2部分と同じ側の部分である第4部分とを有しており、
前記第1偏心ローラは、前記第1部分に設けられており、
前記第2偏心ローラは、前記第3部分に設けられており、
前記作動ばね装置は、前記第2部分と前記第4部分との間隔を広げる力を前記第1可動部材及び前記第2可動部材に付与している請求項6記載のエレベータの非常止め作動装置。 the first movable member has a first portion which is a portion on one side of the first main shaft and a second portion which is a portion on the other side of the first main shaft,
the second movable member has a third portion which is a portion on the same side as the first portion with respect to the second main shaft, and a fourth portion which is a portion on the same side as the second portion with respect to the second main shaft,
The first eccentric roller is provided in the first portion,
the second eccentric roller is provided in the third portion,
7. The emergency stop operating device for an elevator according to claim 6, wherein the operating spring device applies a force to the first movable member and the second movable member to increase the distance between the second portion and the fourth portion.
前記第3部分には、第2接触部が設けられており、
前記アクチュエータは、
前記第1接触部と前記第2接触部との間に介在する位置である保持位置と、前記保持位置から外れた位置である退出位置との間で移動可能なカムと、
前記カムを移動させるアクチュエータ本体と
を有している請求項7記載のエレベータの非常止め作動装置。 The first portion is provided with a first contact portion,
The third portion is provided with a second contact portion,
The actuator comprises:
a cam movable between a holding position, which is a position interposed between the first contact portion and the second contact portion, and a retracted position, which is a position away from the holding position;
8. The emergency stop operating device for an elevator according to claim 7, further comprising: an actuator body for moving the cam.
前記低摩擦部における前記ガイドレールに対する摩擦係数は、前記低摩擦部に隣接する部分における前記ガイドレールに対する摩擦係数よりも小さい請求項1から請求項9までのいずれか1項に記載のエレベータの非常止め作動装置。 a low-friction portion is provided on an outer circumferential surface of the first eccentric roller at a portion that comes into contact with the guide rail when the lifting bar is fully lifted up;
10. The emergency stop operating device for an elevator according to claim 1, wherein a coefficient of friction between the low friction portion and the guide rail is smaller than a coefficient of friction between a portion adjacent to the low friction portion and the guide rail.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/005704 WO2023152979A1 (en) | 2022-02-14 | 2022-02-14 | Elevator emergency stop actuator |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2023152979A1 JPWO2023152979A1 (en) | 2023-08-17 |
| JP7520262B2 true JP7520262B2 (en) | 2024-07-22 |
Family
ID=87564036
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023580049A Active JP7520262B2 (en) | 2022-02-14 | 2022-02-14 | Elevator emergency stop device |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7520262B2 (en) |
| CN (1) | CN118632816A (en) |
| WO (1) | WO2023152979A1 (en) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150251878A1 (en) | 2010-12-17 | 2015-09-10 | Inventio Ag | Activating a safety gear |
| CN212151249U (en) | 2020-04-21 | 2020-12-15 | 吉林中电投新能源有限公司 | Novel exempt from to climb ware |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4044035B2 (en) * | 2003-12-26 | 2008-02-06 | 三菱電機株式会社 | Elevator safety device |
| JP5345183B2 (en) * | 2011-07-14 | 2013-11-20 | 株式会社日立製作所 | Elevator emergency stop device |
-
2022
- 2022-02-14 CN CN202280090395.1A patent/CN118632816A/en active Pending
- 2022-02-14 WO PCT/JP2022/005704 patent/WO2023152979A1/en active Application Filing
- 2022-02-14 JP JP2023580049A patent/JP7520262B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150251878A1 (en) | 2010-12-17 | 2015-09-10 | Inventio Ag | Activating a safety gear |
| CN212151249U (en) | 2020-04-21 | 2020-12-15 | 吉林中电投新能源有限公司 | Novel exempt from to climb ware |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023152979A1 (en) | 2023-08-17 |
| WO2023152979A1 (en) | 2023-08-17 |
| CN118632816A (en) | 2024-09-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1607359B1 (en) | Emergency brake apparatus of elevator | |
| EP2112116B1 (en) | Safety device for elevator | |
| KR101033378B1 (en) | Safety device of elevator | |
| JP6633208B2 (en) | Elevator equipment | |
| JP5726374B2 (en) | Elevator equipment | |
| US8006806B2 (en) | Emergency brake of elevator | |
| CN108290713B (en) | Elevator device | |
| JP6485664B2 (en) | Elevator equipment | |
| JP6723472B2 (en) | Elevator emergency stop device | |
| JP5832669B2 (en) | Elevator equipment | |
| EP3328772B1 (en) | Safety block for elevator | |
| JP7520262B2 (en) | Elevator emergency stop device | |
| JP7146119B2 (en) | Elevator and its safety device | |
| JP2012158440A (en) | Elevator | |
| JP4433888B2 (en) | Multi car elevator | |
| KR100633948B1 (en) | Elevator | |
| WO2022249793A1 (en) | Emergency stop device, elevator, and method of restoring emergency stop device | |
| JP2016204061A (en) | Elevator device | |
| WO2023233462A1 (en) | Safety device for elevator | |
| JP5539044B2 (en) | Elevator braking device | |
| WO2018105036A1 (en) | Emergency stop operation mechanism for elevator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240215 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240611 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240709 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7520262 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |