JP7081704B1 - Autonomous mobile body management device - Google Patents
Autonomous mobile body management device Download PDFInfo
- Publication number
- JP7081704B1 JP7081704B1 JP2021026313A JP2021026313A JP7081704B1 JP 7081704 B1 JP7081704 B1 JP 7081704B1 JP 2021026313 A JP2021026313 A JP 2021026313A JP 2021026313 A JP2021026313 A JP 2021026313A JP 7081704 B1 JP7081704 B1 JP 7081704B1
- Authority
- JP
- Japan
- Prior art keywords
- moving body
- autonomous moving
- car
- command
- movement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005856 abnormality Effects 0.000 claims description 25
- 230000005540 biological transmission Effects 0.000 claims description 13
- 230000000694 effects Effects 0.000 claims description 8
- 238000010586 diagram Methods 0.000 abstract description 13
- 230000006870 function Effects 0.000 description 10
- 238000005259 measurement Methods 0.000 description 3
- 239000000725 suspension Substances 0.000 description 2
- 230000006399 behavior Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/02—Control systems without regulation, i.e. without retroactive action
- B66B1/06—Control systems without regulation, i.e. without retroactive action electric
- B66B1/14—Control systems without regulation, i.e. without retroactive action electric with devices, e.g. push-buttons, for indirect control of movements
- B66B1/18—Control systems without regulation, i.e. without retroactive action electric with devices, e.g. push-buttons, for indirect control of movements with means for storing pulses controlling the movements of several cars or cages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/34—Details, e.g. call counting devices, data transmission from car to control system, devices giving information to the control system
- B66B1/3415—Control system configuration and the data transmission or communication within the control system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/0006—Monitoring devices or performance analysers
- B66B5/0018—Devices monitoring the operating condition of the elevator system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Elevator Control (AREA)
Abstract
【課題】自律移動体が損傷することを抑制することができる自律移動体の管理装置を提供する。【解決手段】自律移動体の管理装置は、自律して移動する自律移動体に対してエレベーターのかごへ乗車する動作またはかごから降車する動作を行わせる移動指令を送信する移動指令部と、移動指令部から移動指令を送信された自律移動体に対して、かごへ乗車する動作またはかごから降車する動作を中止させる指令を送信する移動中止指令部と、を備えた。また、自律移動体の管理装置は、自律して移動する自律移動体に対して出入口装置を通行する動作を行わせる移動指令を送信する移動指令部と、移動指令部から移動指令を送信された自律移動体に対して、出入口装置を通行する動作を中止させる指令を送信する移動中止指令部と、を備えた。【選択図】図2PROBLEM TO BE SOLVED: To provide a management device for an autonomous mobile body capable of suppressing damage to the autonomous mobile body. SOLUTION: An autonomous moving body management device has a movement command unit for transmitting a moving command for causing an autonomous moving body to move into an elevator car or get off the car. It is equipped with a movement stop command unit that transmits a command to stop the operation of getting into the car or the operation of getting off the car to the autonomous moving body to which the movement command is transmitted from the command unit. In addition, the management device for the autonomous moving body is a movement command unit that transmits a movement command that causes the autonomous moving body to perform an operation of passing through the entrance / exit device, and a movement command unit that transmits the movement command. It is equipped with a movement stop command unit that sends a command to stop the operation of passing through the entrance / exit device to the autonomous moving body. [Selection diagram] Fig. 2
Description
本開示は、自律移動体の管理装置に関する。 The present disclosure relates to a management device for an autonomous mobile body.
特許文献1は、エレベーター装置を開示する。エレベーター装置は、自律移動体を搬送する際に自律移動体に重篤な異常が発生した場合、かごの運転を停止する。エレベーター装置は、自律移動体の異常によってエレベーター装置が故障することを回避し得る。 Patent Document 1 discloses an elevator device. The elevator device stops the operation of the car when a serious abnormality occurs in the autonomous moving body while transporting the autonomous moving body. The elevator device can avoid the failure of the elevator device due to the abnormality of the autonomous moving body.
しかしながら、特許文献1において、自律移動体またはエレベーター装置に異常が発生したとしてもかごの運転に支障が無い場合、エレベーター装置は、通常の運転を継続する。このため、自律移動体が損傷し得る。 However, in Patent Document 1, if there is no problem in the operation of the car even if an abnormality occurs in the autonomous moving body or the elevator device, the elevator device continues normal operation. Therefore, the autonomous moving body can be damaged.
本開示は、上述の課題を解決するためになされた。本開示の目的は、自律移動体が損傷することを抑制できる自律移動体の管理装置を提供することである。 The present disclosure has been made to solve the above-mentioned problems. An object of the present disclosure is to provide a management device for an autonomous mobile body capable of suppressing damage to the autonomous mobile body.
本開示に係る自律移動体の管理装置は、自律して移動する自律移動体に対してエレベーターのかごへ乗車する動作または前記かごから降車する動作を行わせる移動指令を送信する移動指令部と、前記移動指令部から前記移動指令を送信された前記自律移動体に対して、前記かごへ乗車する動作または前記かごから降車する動作を中止させる指令を送信する移動中止指令部と、前記移動指令部から前記移動指令を送信された前記自律移動体とは別の自律移動体が前記かごへ乗車する動作を行った場合に、前記エレベーターの制御装置に対して前記かごの運転を中止させる指令を送信する運転中止指令部と、を備え、前記移動中止指令部は、前記移動指令部から前記移動指令を送信された前記自律移動体とは別の自律移動体が前記かごへ乗車する動作を行った場合に、前記移動指令部から前記移動指令を送信された前記自律移動体に対して前記かごへ乗車する動作または前記かごから降車する動作を中止させる指令を送信する。 The management device for an autonomous moving body according to the present disclosure includes a movement command unit that transmits a movement command for causing an autonomous moving body to move into an elevator car or disembark from the car. A movement stop command unit that transmits a command to stop the operation of getting into the car or the operation of getting off the car to the autonomous moving body to which the movement command is transmitted from the movement command unit, and the movement command unit . When an autonomous moving body other than the autonomous moving body to which the moving command is transmitted performs an operation of getting into the car, a command to stop the operation of the car is transmitted to the control device of the elevator. The operation stop command unit is provided with an operation stop command unit, and the movement stop command unit performs an operation in which an autonomous moving body different from the autonomous moving body to which the movement command is transmitted from the movement command unit rides on the car. In this case, a command for stopping the operation of getting into the car or the operation of getting off the car is transmitted to the autonomous moving body to which the movement command is transmitted from the movement command unit .
本開示に係る自律移動体の管理装置は、自律して移動する自律移動体に対して出入口装置を通行する動作を行わせる移動指令を送信する移動指令部と、前記移動指令部から前記移動指令を送信された前記自律移動体に対して、前記出入口装置を通行する動作を中止させる指令を送信する移動中止指令部と、前記出入口装置を物体が通行できる状態にさせる指令を送信し、前記出入口装置を物体が通行できる状態にさせる指令を送信した後、前記移動指令部から前記移動指令を送信された前記自律移動体が前記出入口装置を通行する動作を完了するまでに異常が発生した場合に、前記出入口装置を物体が通行できない状態にさせる指令を送信する状態変更部と、を備え、前記移動中止指令部は、前記移動指令部から前記移動指令を送信された前記自律移動体とは別の自律移動体が前記出入口装置を通行する動作を行った場合に、前記移動指令部から前記移動指令を送信された前記自律移動体に対して前記出入口装置を通行する動作を中止させる指令を送信する。 The management device for an autonomous moving body according to the present disclosure includes a movement command unit that transmits a movement command that causes an autonomous moving body that moves autonomously to perform an operation of passing through an entrance / exit device, and a movement command unit that causes the movement command unit to perform the movement command. To the autonomous moving body that has been transmitted, a movement stop command unit that transmits a command to stop the operation of passing through the entrance / exit device and a command to make the entrance / exit device in a state where an object can pass are transmitted, and the entrance / exit device is transmitted. When an abnormality occurs before the autonomous moving body to which the movement command is transmitted from the movement command unit completes the operation of passing through the entrance / exit device after transmitting a command to make the device passable by an object. The movement stop command unit is separate from the autonomous moving body to which the movement command is transmitted from the movement command unit . When the autonomous moving body of the above performs an operation of passing through the entrance / exit device, a command for stopping the operation of passing through the entrance / exit device is transmitted to the autonomous moving body to which the movement command is transmitted from the movement command unit. To do .
本開示によれば、管理装置は、異常が発生した場合に、自律移動体または自律移動体が利用する装置に対して当該異常に応じた指令を送信する、または自律移動体が当該装置を使用しないように設定する。このため、自律移動体が損傷することを抑制することができる。 According to the present disclosure, when an abnormality occurs, the management device transmits a command corresponding to the abnormality to the autonomous moving body or the device used by the autonomous moving body, or the autonomous moving body uses the device. Set not to. Therefore, it is possible to prevent the autonomous moving body from being damaged.
本開示を実施するための形態について添付の図面に従って説明する。なお、各図中、同一または相当する部分には同一の符号が付される。当該部分の重複説明は適宜に簡略化ないし省略される。 The embodiment for carrying out the present disclosure will be described with reference to the accompanying drawings. In each figure, the same or corresponding parts are designated by the same reference numerals. The duplicate description of the relevant part will be simplified or omitted as appropriate.
実施の形態1.
図1は実施の形態1における自律移動体の管理装置が適用される建築物を示す図である。
Embodiment 1.
FIG. 1 is a diagram showing a building to which the management device for an autonomous moving body according to the first embodiment is applied.
図1に示されるように、エレベーターシステム1は、建築物に設けられる。昇降路2は、建築物の各階を貫く。機械室3は、昇降路2の直上に設けられる。複数の乗場4は、建築物の各階に設けられる。複数の乗場4の各々は、昇降路2に対向する。複数のかご5は、昇降路2の内部に設けられる。図1には、複数のかご5のうちの1つが示される。複数のかご5の各々は、昇降路2の内部を昇降し得るよう設けられる。かごドア6は、複数のかご5にそれぞれ設けられる。制御装置7は、機械室3に設けられる。制御装置7は、複数のかご5の各々の運転を制御し得るよう設けられる。
As shown in FIG. 1, the elevator system 1 is provided in a building. The
複数の自律移動体8は、建築物に配置される。複数の自律移動体8の各々は、建築物の各階において床面を自律して移動し得るよう設けられる。
The plurality of autonomous
例えば、管理装置9は、図示されない別の建築物に設けられる。管理装置9は、制御装置7と任意のタイミングで通信し得るよう設けられる。管理装置9は、複数の自律移動体8の各々と任意のタイミングで通信し得るよう設けられる。管理装置9は、複数の自律移動体8の各々の位置を把握し得るよう設けられる。
For example, the
例えば、管理装置9は、ある自律移動体8に対して現在の階から別の階へ移動する指令を送信する。この場合、当該指令を受信した自律移動体8は、現在の階における乗場4に移動する。当該自律移動体8が乗場4に到着した場合、管理装置9は、制御装置7に対して行先階の情報を含む当該乗場4へのかご呼び登録の情報を送信する。制御装置7は、管理装置9から受信したかご呼び登録の情報に基づいて、当該自律移動体8が存在する乗場4にかご5を配車する。
For example, the
かご5が乗場4に到着した際に、制御装置7は、かごドア6が全開になったことを検知する。この場合、管理装置9は、かご5が乗車できる状態であると判定する。管理装置9は、かご5が乗車できる状態であると判定した場合、当該自律移動体8にかご5へ乗車する動作を行わせる乗車の移動指令を当該自律移動体8に対して送信する。当該自律移動体8は、管理装置9から受信した乗車の移動指令に基づいてかご5に乗車する。当該自律移動体8がかご5へ乗車する動作を完了した場合、管理装置9は、かご5の運転を開始させる指令を制御装置7に送信する。制御装置7は、当該自律移動体8の行先階へ向けてかご5を発車させる。
When the
かご5が当該自律移動体8の行先階の乗場4に到着した際に、制御装置7は、かごドア6が全開になったことを検知する。管理装置9は、かご5が降車できる状態であると判定する。この場合、管理装置9は、当該自律移動体8にかご5から降車する動作を行わせる降車の移動指令を当該自律移動体8に対して送信する。当該自律移動体8は、管理装置9から受信した降車の移動指令に基づいてかご5から降車する。当該自律移動体8は、別の階へ移動する動作を完了する。当該自律移動体8がかご5から降車する動作を完了した場合、管理装置9は、かご5の運転を開始させる指令を制御装置7に送信する。制御装置7は、かご5の運転を開始させる。
When the
乗車の移動指令または降車の移動指令を送信された自律移動体8がかご5を利用する際に異常が発生した場合、管理装置9は、制御装置7または当該自律移動体8に対して当該異常に対応する指令を送信する。
When an abnormality occurs when the autonomous moving
例えば、かご5の内部に障害物が存在する場合、自律移動体8は、かご5の内部において規定の位置に停止する動作というかご5に乗車する動作を完了し得ない。この状態でかごドア6が開く上限時間よりも短い時間に設定された閾値時間が経過した場合、管理装置9は、自律移動体8に対してかご5へ乗車する動作を中止させる乗車の移動中止指令を送信する。この場合、自律移動体8は、かご5から離れる。自律移動体8は、当該かご5へ乗車する動作を中止した旨の乗車の移動中止通知を管理装置9に送信する。その後、かごドア6が開く上限時間が経過した場合、制御装置7は、かご5を発車させる。
For example, when an obstacle exists inside the
その後、当該障害物がかご5の内部に継続して存在した場合、自律移動体8は、当該かご5へ乗車する動作を行うたびに、当該かご5へ乗車する動作を中止した旨の乗車の移動中止通知を管理装置9に送信する。当該かご5へ乗車する動作を中止した旨の乗車の移動中止通知を管理装置9が受信した回数が規定の回数以上になった場合、管理装置9は、自律移動体8が当該かご5を使用しない設定にする。管理装置9は、あるかご5が使用しない設定である場合、当該かご5に乗車する動作を行う乗車の移動指令を自律移動体8に送信しない。
After that, if the obstacle continues to exist inside the
例えば、複数の自律移動体8のうちかご5へ乗車する動作を行わせる乗車の移動指令を送信された自律移動体8ではない別の自律移動体8に異常が発生した場合、当該別の自律移動体8は、当該かご5に乗車しようとすることがある。この場合、管理装置9は、制御装置7に対して当該かご5の運転を中止させる指令を送信する。制御装置7は、当該かご5の運転を中止する。管理装置9は、乗車の移動指令を送信した自律移動体8に対して当該かご5へ乗車する動作を中止させる乗車の移動中止指令を送信する。自律移動体8は、乗車の移動中止指令を受信した場合、当該かご5へ乗車する動作を中止する。
For example, if an abnormality occurs in another autonomous moving
例えば、かご5に存在する自律移動体8が移動できない場合、当該自律移動体8は、かご5から降車する動作を完了しない。この状態でかごドア6が開く上限時間よりも短い時間に設定された閾値時間が経過した場合、管理装置9は、自律移動体8に対してかご5から降車する動作を中止させる降車の移動中止指令を送信する。管理装置9は、当該かご5を使用しない設定にする。その後、かごドア6が開く上限時間が経過した場合、制御装置7は、かご5を発車させる。
For example, if the autonomous moving
例えば、かご5に存在する自律移動体8が移動できない状態で降車の移動指令を送信された場合、当該自律移動体8は、管理装置9に対してかご5から降車する動作を中止する移動中止通知を送信することがある。この場合、管理装置9は、当該かご5を使用しない設定にする。その後、かごドア6が開く上限時間が経過した場合、制御装置7は、かご5を発車させる。
For example, when a move command for disembarking is transmitted in a state where the autonomous moving
例えば、かご5に自律移動体8が存在する状態で地震が発生した場合、かご5は、最寄りの階に停止した後に当該最寄りの階で降車できる状態になる。この場合、管理装置9は、当該かご5が当該自律移動体8の行先階まで運転できなくなったと判定する。管理装置9は、当該最寄りの階において当該自律移動体8を退避させる位置の情報を当該自律移動体8に送信する。当該自律移動体8は、当該退避させる位置へ移動する。
For example, if an earthquake occurs in a state where the autonomous moving
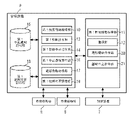
次に、図2を用いて、管理装置9を説明する。
図2は実施の形態1における自律移動体の管理装置のブロック図である。
Next, the
FIG. 2 is a block diagram of the management device for the autonomous mobile body according to the first embodiment.
図2に示されるように、管理装置9は、第1位置情報取得部10と第1制御情報取得部11と登録部12と第1移動指令部13と第1移動中止指令部14と第1中止通知記憶部15と第1中止通知受付部16と退避情報送信部17と第1使用可否記憶部18と第1使用可否設定部19と運転開始指令部20と運転中止指令部21とを備える。
As shown in FIG. 2, the
第1位置情報取得部10は、自律移動体8の位置を表す位置情報を自律移動体8から取得する。
The first position
第1制御情報取得部11は、制御装置7からエレベーターシステム1の制御情報を取得する。
The first control information acquisition unit 11 acquires the control information of the elevator system 1 from the
登録部12は、第1位置情報取得部10が取得した自律移動体8の位置情報を用いて自律移動体8が乗場4に到着したことを検出する。登録部12は、自律移動体8が乗場4に到着したことを検出した場合、当該自律移動体8の行先階の情報を含む当該乗場4へのかご呼び登録の情報を制御装置7に送信する。
The
第1移動指令部13は、第1位置情報取得部10が取得した位置情報を用いて自律移動体8が乗場4に到着したか否かを判定する。第1移動指令部13は、自律移動体8が乗場4に到着したと判定した場合、第1制御情報取得部11が取得した制御情報を用いて、かご5が乗車できる状態であるか否かを判定する。第1移動指令部13は、かご5が乗車できる状態であると判定した場合、自律移動体8にかご5に乗車する動作を行わせる乗車の移動指令を当該自律移動体8に対して送信する。
The first
自律移動体8がかご5に乗車しているときに、第1移動指令部13は、第1制御情報取得部11が取得した制御情報を用いて、かご5が降車できる状態であるか否かを判定する。第1移動指令部13は、かご5が降車できる状態であると判定した場合、自律移動体8にかご5から降車する動作を行わせる降車の移動指令を当該自律移動体8に対して送信する。
When the autonomous moving
第1移動指令部13によってかご5が乗車できる状態であると判定されたときに、第1移動中止指令部14は、時間の計測を開始する。第1移動中止指令部14は、自律移動体8がかご5に乗車する動作を完了した場合、時間の計測を停止し、計測した時間をリセットする。第1移動中止指令部14は、かご5が乗車できる状態になってから規定の時間が経過したか否かを判定する。第1移動中止指令部14は、かご5が乗車できる状態になってから規定の時間が経過したと判定したときに乗車の移動指令を送信された自律移動体8がかご5へ乗車する動作を完了していない場合、当該自律移動体8に対してかご5へ乗車する動作を中止させる乗車の移動中止指令を送信する。
When the first
制御装置7に対してかご5の運転を中止させる指令が送信された場合、第1移動中止指令部14は、自律移動体8に対してかご5へ乗車する動作を中止させる乗車の移動中止指令を送信する。
When a command to stop the operation of the
第1移動指令部13によってかご5が降車できる状態であると判定されたときに、第1移動中止指令部14は、時間の計測を開始する。第1移動中止指令部14は、自律移動体8がかご5から降車する動作を完了した場合、時間の計測を停止し、計測した時間をリセットする。第1移動中止指令部14は、かご5が降車できる状態になってから規定の時間が経過したか否かを判定する。第1移動中止指令部14は、かご5が降車できる状態になってから規定の時間が経過したと判定したときに降車の移動指令を送信された自律移動体8がかご5から降車する動作を完了していない場合、当該自律移動体8に対してかご5から降車する動作を中止させる降車の移動中止指令を送信する。
When the first
第1中止通知記憶部15は、自律移動体8がかご5へ乗車する動作またはかご5から降車する動作を中止した旨を示す移動中止通知の履歴情報を記憶する。
The first stop
第1中止通知受付部16は、自律移動体8から送信される移動中止通知を受信する。第1中止通知受付部16は、移動中止通知を受信した場合、当該移動中止通知を反映した移動中止通知の履歴情報を第1中止通知記憶部15に記憶させる。
The first cancellation
自律移動体8がかご5に乗車しているときに、退避情報送信部17は、第1制御情報取得部11が取得した制御情報を用いて、かご5が自律移動体8の行先階まで運転できなくなったか否かを判定する。退避情報送信部17は、かご5が自律移動体8の行先階まで運転できなくなったと判定した場合、第1制御情報取得部11が取得した制御情報を用いて、かご5が停止した階を特定する。その後、退避情報送信部17は、当該かご5が停止した階における自律移動体8を退避させる位置の情報を作成する。退避情報送信部17は、自律移動体8に対して、停止した階における当該自律移動体8を退避させる位置の情報を送信する。
When the autonomous moving
第1使用可否記憶部18は、複数のかご5の各々について、自律移動体8が当該かご5を使用する設定および当該かご5を使用しない設定のいずれであるかを示す使用可否情報を記憶する。
The first
第1使用可否設定部19は、自律移動体8に乗車の移動中止指令を送信していない状態で第1中止通知受付部16が当該自律移動体8からあるかご5に関する乗車の移動中止通知を受信したか否かを判定する。第1使用可否設定部19は、自律移動体8に乗車の移動中止指令を送信していない状態で第1中止通知受付部16が当該自律移動体8からあるかご5に関する乗車の移動中止通知を受信したと判定した場合、第1中止通知記憶部15が記憶する移動中止通知の履歴情報を用いて、設定された日時からこれまでの間に当該かご5に関する乗車の移動中止通知を受信した回数が規定の回数以上であるか否かを判定する。この際、第1中止通知受付部16は、全ての自律移動体8から送信された乗車の移動中止通知の履歴情報を参照する。第1使用可否設定部19は、当該かご5に関する乗車の移動中止通知を受信した回数が規定の回数以上であると判定した場合、当該かご5を使用しない設定にする。具体的には、この場合、第1使用可否設定部19は、第1使用可否記憶部18が記憶する使用可否情報において、当該かご5を使用しない設定に変更する。
The first
第1使用可否設定部19は、自律移動体8に降車の移動中止指令を送信していない状態で第1中止通知受付部16が当該自律移動体8からあるかご5に関する降車の移動中止通知を受信したか否かを判定する。第1使用可否設定部19は、自律移動体8に降車の移動中止指令を送信していない状態で第1中止通知受付部16が当該自律移動体8からあるかご5に関する降車の移動中止通知を受信したと判定した場合、当該かご5を使用しない設定にする。
The first
第1移動中止指令部14が自律移動体8に対して降車の移動中止指令を送信した場合、第1使用可否設定部19は、当該かご5を使用しない設定にする。
When the first movement
運転開始指令部20は、第1位置情報取得部10が取得した自律移動体8の位置情報を用いて、自律移動体8がかご5へ乗車する動作を完了したか否かを判定する。運転開始指令部20は、自律移動体8がかご5へ乗車する動作を完了したと判定した場合、制御装置7に当該かご5の運転を開始させる指令を送信する。
The operation
運転開始指令部20は、第1位置情報取得部10が取得した自律移動体8の位置情報を用いて、自律移動体8がかご5から降車する動作を完了したか否かを判定する。運転開始指令部20は、自律移動体8がかご5から降車する動作を完了したと判定した場合、制御装置7に当該かご5の運転を開始させる指令を送信する。
The operation
運転中止指令部21は、複数の自律移動体8の位置情報を用いて、第1移動指令部13が乗車の移動指令を送信した自律移動体8がかご5へ乗車する動作を完了する前に、複数の自律移動体8のうち第1移動指令部13が乗車の移動指令を送信した自律移動体8ではない別の自律移動体8がかご5に乗車する動作を行ったか否かを判定する。運転中止指令部21は、第1移動指令部13が乗車の移動指令を送信した自律移動体8がかご5へ乗車する動作を完了する前に、別の自律移動体8がかご5に乗車する動作を行ったと判定した場合、制御装置7に当該かご5の運転を中止させる指令を送信する。
The operation stop command unit 21 uses the position information of the plurality of autonomous
次に、図3を用いて、第1中止通知記憶部15が記憶する移動中止通知の履歴情報を説明する。
図3は実施の形態1における自律移動体の管理装置が記憶する移動中止通知の履歴情報を表す図である。
Next, the history information of the movement stop notification stored in the first stop
FIG. 3 is a diagram showing the history information of the movement stop notification stored in the management device of the autonomous moving body in the first embodiment.
図3に示されるように、移動中止通知の履歴情報は、「通知日時」の情報と「通知元」の情報と「対象装置」の情報と「乗車中止/降車中止」の情報とを対応付けた情報である。 As shown in FIG. 3, the history information of the movement cancellation notification associates the information of the "notification date and time", the information of the "notification source", the information of the "target device", and the information of the "boarding cancellation / disembarkation cancellation". Information.
「通知日時」の情報は、自律移動体8から移動中止通知を受信した日付と時間との情報である。「通知元」の情報は、移動中止通知を発信した自律移動体8を識別する情報である。「対象装置」の情報は、自律移動体8が移動することを中止した対象の装置を示す情報である。「乗車中止/降車中止」の情報は、当該移動中止通知が乗車の移動中止通知または降車の移動中止通知のいずれであるかを示す情報である。
The information of the "notification date and time" is the information of the date and time when the movement stop notification is received from the autonomous moving
次に、図4を用いて、第1使用可否記憶部18が記憶する使用可否情報を説明する。
図4は実施の形態1における自律移動体の管理装置が記憶する使用可否情報を表す図である。
Next, the usability information stored in the first
FIG. 4 is a diagram showing usability information stored in the management device of the autonomous mobile body in the first embodiment.
図4に示されるように、使用可否情報は、「対象装置」の情報と「使用可否」の情報とを対応付けた情報である。 As shown in FIG. 4, the usability information is information in which the information of the “target device” and the information of the “usability” are associated with each other.
「対象装置」の情報は、対象の装置を識別する情報である。「使用可否」の情報は、対象の装置が使用する設定または使用しない設定のいずれであるかを示す情報である。 The information of the "target device" is information for identifying the target device. The "availability" information is information indicating whether the setting is used or not used by the target device.
「使用可否」の情報における「使用可」の表示は、対象の装置が使用する設定であることを示す。「使用可否」の情報における「使用不可」の表示は、対象の装置が使用しない設定であることを示す。 The display of "Available" in the "Availability" information indicates that the setting is used by the target device. The display of "unusable" in the "usable / unusable" information indicates that the target device is not used.
次に、図5と図6とを用いて、管理装置9が行う動作を説明する。
図5は実施の形態1における自律移動体の管理装置が行う動作を説明するフローチャートである。図6は実施の形態1における自律移動体の管理装置が行う動作を説明するフローチャートである。
Next, the operation performed by the
FIG. 5 is a flowchart illustrating the operation performed by the management device of the autonomous moving body in the first embodiment. FIG. 6 is a flowchart illustrating the operation performed by the management device of the autonomous moving body in the first embodiment.
管理装置9は、ある自律移動体8が乗場4に到着した場合に、ステップS101の動作を開始する。
The
図5と図6とに示されるように、ステップS101において、管理装置9は、制御情報を用いて、かご5が乗車できる状態であるか否かを判定する。
As shown in FIGS. 5 and 6, in step S101, the
ステップS101で、当該かご5が乗車できる状態でないと判定した場合、管理装置9は、ステップS101の動作を繰り返す。
If it is determined in step S101 that the
ステップS101で、当該かご5が乗車できる状態であると判定した場合、管理装置9は、ステップS102の動作を行う。ステップS102において、管理装置9は、当該自律移動体8に当該かご5へ乗車する動作を行わせる乗車の移動指令を当該自律移動体8に対して送信する。
When it is determined in step S101 that the
その後、管理装置9は、ステップS103の動作を行う。ステップS103において、管理装置9は、当該かご5が乗車できる状態になってから規定の時間が経過したか否かを判定する。
After that, the
ステップS103で、当該かご5が乗車できる状態になってから規定の時間が経過していないと判定した場合、管理装置9は、ステップS104の動作を行う。ステップS104において、管理装置9は、移動指令を送信した自律移動体8ではない別の自律移動体8がかご5に乗車する動作を行ったか否かを判定する。
When it is determined in step S103 that the specified time has not elapsed since the
ステップS104で、別の自律移動体8がかご5に乗車する動作を行っていないと判定した場合、管理装置9は、ステップS105の動作を行う。ステップS105において、管理装置9は、当該自律移動体8に乗車の移動中止指令を送信していない状態で当該自律移動体8から当該かご5に関する乗車の移動中止通知を受信したか否かを判定する。
If it is determined in step S104 that another autonomous moving
ステップS105で、当該自律移動体8に乗車の移動中止指令を送信していない状態で当該自律移動体8から当該かご5に関する乗車の移動中止通知を受信していないと判定した場合、管理装置9は、ステップS106の動作を行う。ステップS106において、管理装置9は、当該自律移動体8が当該かご5へ乗車する動作を完了したか否かを判定する。
When it is determined in step S105 that the ride stop notice regarding the
ステップS106で、当該自律移動体8が当該かご5へ乗車する動作を完了していないと判定した場合、管理装置9は、ステップS103以降の動作を行う。
If it is determined in step S106 that the operation of the autonomous moving
ステップS106で、当該自律移動体8が当該かご5へ乗車する動作を完了したと判定した場合、管理装置9は、ステップS107の動作を行う。ステップS107において、管理装置9は、制御装置7に当該かご5の運転を開始させる指令を送信する。この場合、制御装置7は、当該かご5を運転させる。
When it is determined in step S106 that the operation of the autonomous moving
その後、管理装置9は、ステップS108の動作を行う。ステップS108において、管理装置9は、当該かご5の制御情報を用いて、当該かご5が当該自律移動体8の行先階まで運転できなくなったか否かを判定する。
After that, the
ステップS108で、当該かご5が当該自律移動体8の行先階まで運転できていると判定した場合、管理装置9は、ステップS109の動作を行う。ステップS109において、管理装置9は、当該かご5が降車できる状態であるか否かを判定する。
If it is determined in step S108 that the
ステップS109で、当該かご5が降車できる状態でないと判定した場合、管理装置9は、ステップS108以降の動作を行う。
If it is determined in step S109 that the
ステップS109で、当該かご5が降車できる状態であると判定した場合、管理装置9は、ステップS110の動作を行う。ステップS110において、管理装置9は、当該自律移動体8に対して当該かご5から降車する降車の移動指令を送信する。
When it is determined in step S109 that the
その後、管理装置9は、ステップS111の動作を行う。ステップS111において、管理装置9は、当該かご5が降車できる状態になってから規定の時間が経過したか否かを判定する。
After that, the
ステップS111で、当該かご5が降車できる状態になってから規定の時間が経過していないと判定した場合、管理装置9は、ステップ112の動作を行う。ステップS112において、管理装置9は、当該自律移動体8に降車の移動中止指令を送信していない状態で当該自律移動体8から当該かご5に関する降車の移動中止通知を受信したか否かを判定する。
If it is determined in step S111 that the specified time has not elapsed since the
ステップS112で、当該自律移動体8に降車の移動中止指令を送信していない状態で当該自律移動体8から当該かご5に関する降車の移動中止通知を受信していないと判定した場合、管理装置9は、ステップS113の動作を行う。ステップS113において、管理装置9は、当該自律移動体8の位置情報を用いて、当該自律移動体8が当該かご5から降車する動作を完了したか否かを判定する。
In step S112, when it is determined that the autonomous moving
ステップS113で、当該自律移動体8が当該かご5から降車する動作を完了していないと判定した場合、管理装置9は、ステップS111以降の動作を行う。
If it is determined in step S113 that the autonomous moving
ステップS113で、当該自律移動体8が当該かご5から降車する動作を完了したと判定した場合、管理装置9は、ステップS114の動作を行う。ステップS114において、制御装置7に当該かご5の運転を開始させる指令を送信する。この場合、制御装置7は、当該かご5を運転させる。
When it is determined in step S113 that the autonomous moving
その後、管理装置9は、動作を終了する。
After that, the
ステップS103で、当該かご5が乗車できる状態になってから規定の時間が経過したと判定した場合、管理装置9は、ステップS115の動作を行う。ステップS115において、管理装置9は、当該自律移動体8に対して、当該かご5へ乗車する動作を中止させる乗車の移動中止指令を送信する。その後、管理装置9は、動作を終了する。
When it is determined in step S103 that a predetermined time has elapsed since the
ステップS104で、別の自律移動体8が当該かご5に乗車する動作を行ったと判定した場合、管理装置9は、ステップS116の動作を行う。ステップS116において、管理装置9は、制御装置7に当該かご5の運転を中止させる指令を送信する。その後、管理装置9は、ステップS115以降の動作を行う。
If it is determined in step S104 that another autonomous moving
ステップS105で、当該自律移動体8に乗車の移動中止指令を送信していない状態で当該自律移動体8から当該かご5に関する乗車の移動中止通知を受信したと判定した場合、管理装置9は、ステップS117の動作を行う。ステップS117において、管理装置9は、第1中止通知記憶部15が記憶する移動中止通知情報に基づいて、当該かご5が関係する移動中止通知を受信した回数が規定の閾値以上であるか否かを判定する。
When it is determined in step S105 that the ride stop notice regarding the
ステップS117で、当該かご5が関係する移動中止通知を受信した回数が規定の閾値以上でないと判定した場合、管理装置9は、動作を終了する。
When it is determined in step S117 that the number of times the movement stop notification related to the
ステップS117で、当該かご5が関係する移動中止通知を受信した回数が規定の閾値以上であると判定した場合、管理装置9は、ステップS118の動作を行う。ステップS118において、管理装置9は、当該かご5を使用しない設定にする。その後、管理装置9は、動作を終了する。
When it is determined in step S117 that the number of times the movement stop notification related to the
ステップS108で、当該かご5が当該自律移動体8の行先階まで運転できなくなったと判定した場合、管理装置9は、ステップS119の動作を行う。ステップS119において、管理装置9は、当該自律移動体8に対して、停止した階において退避する位置の情報を送信する。その後、管理装置9は、動作を終了する。
If it is determined in step S108 that the
ステップS111で、当該かご5が降車できる状態になってから規定の時間が経過したと判定した場合、管理装置9は、ステップ120の動作を行う。ステップS120において、管理装置9は、当該自律移動体8に対して、当該かご5から降車する動作を中止させる降車の移動中止指令を送信する。
If it is determined in step S111 that a predetermined time has elapsed since the
ステップS120の動作を行った場合、またはステップS112で当該自律移動体8に降車の移動中止指令を送信していない状態で当該自律移動体8から当該かご5に関する降車の移動中止通知を受信したと判定した場合、管理装置9は、ステップS121の動作を行う。ステップS121において、管理装置9は、当該かご5を使用しないように設定する。その後、管理装置9は、動作を終了する。
When the operation of step S120 is performed, or when the autonomous moving
以上で説明した実施の形態1によれば、管理装置9は、自律移動体8に対してかご5へ乗車する動作またはかご5から降車する動作を中止させる移動中止指令を送信する。移動中止指令を受信した自律移動体8は、かご5のかごドア6から離れる動作を行う。このため、かごドア6に自律移動体8が挟まれることを抑制することができる。その結果、自律移動体8が損傷することを抑制することができる。また、かごドア6が損傷することを抑制することができる。
According to the first embodiment described above, the
また、管理装置9は、かご5が乗車できる状態またはかご5が降車できる状態になってから規定の時間が経過したときに、移動指令を送信した自律移動体8がかご5へ乗車する動作またはかご5から降車する動作を完了していない場合に、当該自律移動体8に対して移動中止指令を送信する。このため、管理装置9は、自律移動体8がかご5へ乗車する動作またはかご5から降車する動作に手間取った場合に、自律移動体8がかごドア6に衝突することを抑制することができる。
Further, the
また、管理装置9は、かご5へ乗車する乗車の移動指令を送信された自律移動体8ではない別の自律移動体8がかご5へ乗車する動作を行った場合、移動指令を送信された自律移動体8に対して移動中止指令を送信する。このため、管理装置9は、移動指令を送信された自律移動体8と別の自律移動体8とが衝突することを抑制することができる。なお、管理装置9は、かご5から降車する移動指令を送信された自律移動体8ではない別の自律移動体8がかご5へ乗車する動作を行った場合に、移動指令を送信された自律移動体8に対して移動中止指令を送信してもよい。この場合、仮に2つの自律移動体8が衝突したとしても、その衝突の衝撃を抑制することができる。その結果、自律移動体8が損傷することを抑制することができる。
Further, when the
また、例えば、従来のエレベーターシステム1において、ある自律移動体8が乗車できないと判断した異常がかご5の内部に発生したとしても、当該異常がかご5の運行に支障を与えない場合、当該自律移動体8とは別の自律移動体8は、当該かご5に乗車することがある。この場合、当該別の自律移動体8は、当該異常によって損傷することがある。実施の形態1によれば、管理装置9は、自律移動体8がかご5へ乗車する動作またはかご5から降車する動作を中止した旨の通知を受信した場合、当該かご5を使用しないように設定する。このため、ある自律移動体8が乗車できないと判断した異常が発生した場合、別の自律移動体8が当該かご5へ乗車することを抑制することができる。
Further, for example, in the conventional elevator system 1, even if an abnormality that is determined that the autonomous moving
また、管理装置9は、移動中止通知を受信した回数が規定の回数未満である場合、当該かご5を使用しないようには設定しない。例えば、自律移動体8に発生した故障が原因で当該自律移動体8が乗車の移動中止通知を管理装置9に送信した場合、管理装置9は、かご5への乗車の移動中止通知を一度だけ受信する。この場合、管理装置9は、当該かご5を使用しないようには設定しない。このため、かご5に異常が発生していないにも関わらず当該かご5を使用しないように設定されることで、かご5の運転効率が低下することを抑制することができる。
Further, the
また、例えば、移動中止通知を送信された自律移動体8とは別の自律移動体8の形状が当該行先階を移動することに適していない形状である場合、当該別の自律移動体8は、当該行先階において設備に衝突することで損傷する恐れがある。管理装置9は、移動指令を送信された自律移動体8とは別の自律移動体8がかご5へ乗車する行動をとった場合に、制御装置7に対してかご5の運転を中止させる指令を送信する。このため、当該別の自律移動体8が移動指令を送信された自律移動体8の行先階へ移動することを抑制できる。その結果、当該別の自律移動体8が損傷することを抑制することができる。
Further, for example, when the shape of the autonomous moving
また、例えば、従来のエレベーターシステム1において、移動指令を送信された自律移動体8とは別の自律移動体8がかご5に乗車したとき、当該別の自律移動体8は、移動指令を送信された自律移動体8の行先階まで移動し得る。当該別の自律移動体8は、当該行先階へ移動することがセキュリティの観点から許可されていないことがある。実施の形態1において、管理装置9は、移動指令を送信された自律移動体8とは別の自律移動体8がかご5へ乗車する行動をとった場合に、制御装置7に対してかご5の運転を中止させる指令を送信する。このため、当該別の自律移動体8が移動指令を送信された自律移動体8の行先階へ移動することを抑制できる。その結果、エレベーターシステム1のセキュリティを向上することができる。
Further, for example, in the conventional elevator system 1, when an autonomous moving
なお、管理装置9の運転中止指令部21は、かご5から降車する動作を行う降車の移動指令を送信された自律移動体8とは別の自律移動体8が当該かご5へ乗車する動作を行った場合に、制御装置7に対してかご5の運転を中止させる指令を送信してもよい。このため、当該別の自律移動体8が移動を許可されていない階へ移動することを抑制することができる。
The operation stop command unit 21 of the
また、例えば、従来のエレベーターシステム1において、地震発生時に自律移動体8に移動行動が設定されていない階にかご5が到着した場合、自律移動体8は、かご5の中から動かないことがある。この場合、自律移動体8は、当該地震によってかご5と共に損傷する恐れがある。実施の形態1において、かご5が自律移動体8の行先階に運転できずに行先階とは異なる階に停止した場合に、管理装置9は、当該異なる階において自律移動体8が退避する位置の情報を自律移動体8に送信する。この場合、自律移動体8は、当該退避する位置の情報に基づいて、かご5から降車する。このため、管理装置9は、自律移動体8が損傷することを抑制することができる。
Further, for example, in the conventional elevator system 1, when the
なお、第1移動指令部13は、かご5が乗車できる状態であるか否かを判定する際に、第1制御情報取得部11が取得した制御情報に含まれるかご5の位置、かごドア6の状態、等の情報を用いてもよい。第1移動指令部13は、かご5が降車できる状態であるか否かを判定する際に、第1制御情報取得部11が取得した制御情報に含まれるかご5の位置、かごドア6の状態、等の情報を用いてもよい。
When the first
なお、第1移動指令部13は、かご5が乗車できる状態であるか否かを判定する際に、第1使用可否記憶部18が記憶する使用可否情報を参照してもよい。具体的には、第1使用可否記憶部18が記憶する使用可否情報においてかご5が使用しない設定である場合、第1移動指令部13は、第1制御情報取得部11が取得した制御情報の内容に関わらずかご5が乗車できない状態であると判定してもよい。
The first
なお、第1移動中止指令部14は、自律移動体8がかご5に乗車しようとする動作を行った場合、自律移動体8がかご5へ乗車する動作を完了したと判定してもよい。具体的には、例えば、第1移動中止指令部14は、自律移動体8がかごドア6の間を通ったことを検知した場合、自律移動体8がかご5へ乗車する動作を完了したと判定してもよい。例えば、第1移動中止指令部14は、自律移動体8がかご5の内部で停止すべき位置の近傍に存在することを検知した場合、自律移動体8がかご5へ乗車する動作を完了したと判定してもよい。
When the autonomous moving
なお、第1移動中止指令部14は、運転中止指令部21の代わりに、複数の自律移動体8の位置情報を用いて、第1移動指令部13が乗車の移動指令を送信した自律移動体8がかご5へ乗車する動作を完了する前に、複数の自律移動体8のうち第1移動指令部13が乗車の移動指令を送信した自律移動体8ではない別の自律移動体8がかご5に乗車する動作を行ったか否かを判定してもよい。第1移動中止指令部14は、別の自律移動体8がかご5に乗車する動作を行ったと判定した場合、第1移動指令部13が乗車の移動指令を送信した自律移動体8に対してかご5から降車する動作を中止させる降車の移動中止指令を送信してもよい。この場合、運転中止指令部21は、制御装置7に当該かご5の運転を中止させる指令を送信してもよい。
In addition, the first movement
なお、第1使用可否設定部19は、かご5に関する乗車の移動中止通知を受信した回数が規定の回数以上であるか否かを判定する際に、判定する時点から規定の期間内に受信した乗車の移動中止通知の履歴情報を用いてもよい。
When determining whether or not the number of times the ride stop notification regarding the
なお、退避情報送信部17は、かご5が自律移動体8の行先階まで運転できなくなったか否かを判定する際に、第1制御情報取得部11が取得した制御情報に含まれるかご5の位置の情報、かごドア6の開閉状態の情報、等を用いてもよい。この場合、例えば、退避情報送信部17は、定められた時間よりも長い間かご5の位置が変化しないことを検知することで、かご5が自律移動体8の行先階まで運転できなくなったと判定してもよい。
The evacuation
なお、退避情報送信部17は、かご5が停止した階を特定する際に、第1制御情報取得部11が取得した制御情報を用いて、かご5がこれから停止しようとする階をかご5が停止した階とみなしてもよい。
When the evacuation
なお、退避情報送信部17は、自律移動体8を退避させる位置の情報として、かご5が停止した階において自律移動体8を退避させる範囲を表す情報を作成してもよい。退避情報送信部17は、複数の自律移動体8に対して複数の退避させる位置の情報を作成する場合、複数の自律移動体8の各々に応じた複数の退避させる位置の情報を作成してもよい。退避情報送信部17は、複数の自律移動体8の各々に応じた複数の退避させる位置の情報を作成することで、複数の自律移動体8が1か所に退避して混雑することを抑制する。
The evacuation
なお、運転開始指令部20は、自律移動体8がかご5へ乗車する動作を完了したか否かを判定する際に、自律移動体8がかご5へ乗車したことを直接的に表す状態情報を当該自律移動体8から取得してもよい。運転開始指令部20は、自律移動体8の位置情報の代わりに当該状態情報を用いて、当該自律移動体8がかご5へ乗車する動作を完了したと判定してもよい。運転開始指令部20は、自律移動体8がかご5から降車する動作を完了したか否かを判定する際に、自律移動体8がかご5から降車したことを直接的に表す状態情報を当該自律移動体8から取得してもよい。運転開始指令部20は、自律移動体8の位置情報の代わりに当該状態情報を用いて、当該自律移動体8がかご5から降車する動作を完了したと判定してもよい。
The operation
なお、運転中止指令部21は、第1移動指令部13が乗車の移動指令を送信した自律移動体8ではない別の自律移動体8がかご5へ乗車する動作を行ったか否かを判定する際に、別の自律移動体8がかご5に乗車する動作を行ったことを直接的に示す状態情報を当該別の自律移動体から取得してもよい。運転中止指令部21は、別の自律移動体8の位置情報の代わりに当該状態情報を用いて当該別の自律移動体がかご5へ乗車する動作を行ったと判定してもよい。
The operation stop command unit 21 determines whether or not the first
なお、運転中止指令部21は、別の自律移動体8がかご5に乗車しようとする動作を行った場合、別の自律移動体8がかご5に乗車する動作を行ったと判定してもよい。具体的には、例えば、運転中止指令部21は、複数の自律移動体8の位置情報を用いて別の自律移動体8がかごドア6を通行した行動を検知した場合、別の自律移動体8がかご5に乗車する動作を行ったと判定してもよい。例えば、運転中止指令部21は、複数の自律移動体8の位置情報を用いて別の自律移動体8がかごドア6の付近に移動したことを検知した場合、別の自律移動体8がかご5に乗車する動作を行ったと判定してもよい。
In addition, when another autonomous moving
次に、図7を用いて、管理装置9を構成するハードウェアの例を説明する。
図7は実施の形態1におけるエレベーターシステムの制御装置のハードウェア構成図である。
Next, an example of the hardware constituting the
FIG. 7 is a hardware configuration diagram of the control device of the elevator system according to the first embodiment.
管理装置9の各機能は、処理回路により実現し得る。例えば、処理回路は、少なくとも1つのプロセッサ100aと少なくとも1つのメモリ100bとを備える。例えば、処理回路は、少なくとも1つの専用のハードウェア200を備える。
Each function of the
処理回路が少なくとも1つのプロセッサ100aと少なくとも1つのメモリ100bとを備える場合、管理装置9の各機能は、ソフトウェア、ファームウェア、またはソフトウェアとファームウェアとの組み合わせで実現される。ソフトウェアおよびファームウェアの少なくとも一方は、プログラムとして記述される。ソフトウェアおよびファームウェアの少なくとも一方は、少なくとも1つのメモリ100bに格納される。少なくとも1つのプロセッサ100aは、少なくとも1つのメモリ100bに記憶されたプログラムを読み出して実行することにより、管理装置9の各機能を実現する。少なくとも1つのプロセッサ100aは、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、DSPともいう。例えば、少なくとも1つのメモリ100bは、RAM、ROM、フラッシュメモリ、EPROM、EEPROM等の、不揮発性または揮発性の半導体メモリ、磁気ディスク、フレキシブルディスク、光ディスク、コンパクトディスク、ミニディスク、DVD等である。
When the processing circuit includes at least one
処理回路が少なくとも1つの専用のハードウェア200を備える場合、処理回路は、例えば、単一回路、複合回路、プログラム化したプロセッサ、並列プログラム化したプロセッサ、ASIC、FPGA、またはこれらの組み合わせで実現される。例えば、管理装置9の各機能は、それぞれ処理回路で実現される。例えば、管理装置9の各機能は、まとめて処理回路で実現される。
If the processing circuit comprises at least one
管理装置9の各機能について、一部を専用のハードウェア200で実現し、他部をソフトウェアまたはファームウェアで実現してもよい。例えば、かご5に運転を開始させる指令を送信する機能については専用のハードウェア200としての処理回路で実現し、かご5に運転を開始させる機能以外の機能については少なくとも1つのプロセッサ100aが少なくとも1つのメモリ100bに格納されたプログラムを読み出して実行することにより実現してもよい。
For each function of the
このように、処理回路は、ハードウェア200、ソフトウェア、ファームウェア、またはこれらの組み合わせで管理装置9の各機能を実現する。
As described above, the processing circuit realizes each function of the
実施の形態2.
図8は実施の形態2における自律移動体の管理装置が適用される建築物の概要を示す図である。なお、実施の形態1の部分と同一又は相当部分には同一符号が付される。当該部分の説明は省略される。
FIG. 8 is a diagram showing an outline of a building to which the management device for an autonomous moving body according to the second embodiment is applied. The same or corresponding parts as those of the first embodiment are designated by the same reference numerals. The explanation of this part is omitted.
図8に示されるように、例えば、建築物の内部は、セキュリティのレベルに応じて外部エリアと共用エリアと個別エリアとに分けられる。 As shown in FIG. 8, for example, the inside of a building is divided into an external area, a common area, and an individual area according to the level of security.
ゲート22は、出入口装置として、建築物のエントランス階に設けられる。ゲート22は、建築物のエントランス階において、外部エリアと共用エリアとを区切る位置に設けられる。ゲート22は、利用者、自律移動体8、等を通行させ得るよう設けられる。
The
複数のドア23は、出入口装置として、建築物の各階に設けられる。複数のドア23は、建築物の各階において共用エリアと個別エリアとを区切る位置にそれぞれ設けられる。複数のドア23の各々は、利用者、自律移動体8、等を通行させ得るよう設けられる。
The plurality of
入退管理装置24は、機械室3に設けられる。入退管理装置24は、ゲート22と通信し得るよう設けられる。入退管理装置24は、複数のドア23の各々と通信し得るよう設けられる。入退管理装置24は、管理装置9と通信し得るよう設けられる。
The entry /
管理装置9は、自律移動体8と入退管理装置24とに指令を送信することで、自律移動体8に対象の出入口装置を通行させる。
The
例えば、管理装置9は、外部エリアに存在する自律移動体8に対して外部エリアから共用エリアへ移動する指令を送信する。この場合、管理装置9は、対象の出入口装置であるゲート22に物体の通行ができる状態にさせる指令を入退管理装置24に対して送信する。自律移動体8は、ゲート22の近傍に存在する待機領域へ移動する。入退管理装置24は、ゲート22を物体の通行ができる状態にさせる指令を受信した場合、ゲート22を閉じた状態から開いた状態に変更する。その後、入退管理装置24は、ゲート22が通行できる状態である旨の情報を管理装置9に送信する。
For example, the
管理装置9は、ゲート22が通行できる状態である旨の情報を受信したときに自律移動体8がゲート22の待機領域に存在する場合、自律移動体8にゲート22を通行する動作を行わせる通行の移動指令を当該自律移動体8に対して送信する。自律移動体8は、管理装置9から受信した通行の移動指令に基づいてゲート22を通行する。自律移動体8がゲート22を通行する動作を完了した場合、管理装置9は、ゲート22を物体の通行ができない状態にさせる指令を入退管理装置24に対して送信する。入退管理装置24は、ゲート22を物体の通行ができない状態にさせる指令を受信した場合、ゲート22を開いた状態から閉じた状態にする。
When the
通行の移動指令を送信された自律移動体8が対象の出入口装置を通行する際に異常が発生した場合、管理装置9は、当該自律移動体8および入退管理装置24の少なくとも一方に対して当該異常に対応する指令を送信する。
When an abnormality occurs when the autonomous moving
例えば、あるドア23において自律移動体8の進路に障害物が存在する場合、自律移動体8は、当該ドア23を通行できない。この状態で、当該ドア23が開く上限時間よりも短い時間に設定された規定の時間が経過した場合、管理装置9は、通行の移動指令を送信された自律移動体8に対して当該ドア23を通行する動作を中止させる通行の移動中止指令を送信する。この場合、自律移動体8は、当該ドア23から離れた位置へ移動する。自律移動体8は、当該ドア23を通行する動作を中止した旨の通行の移動中止通知を管理装置9に送信する。管理装置9は、当該ドア23を物体の通行ができない状態にさせる指令を入退管理装置24に送信する。入退管理装置24は、当該ドア23を閉じた状態にする。
For example, if an obstacle exists in the path of the autonomous moving
また、あるドア23において自律移動体8の進路に障害物が存在する場合、自律移動体8は、当該ドア23を通行できない旨を自律的に判断することがある。この場合、自律移動体8は、当該ドア23を通行する動作を中止し、当該ドア23から離れた位置へ移動する。自律移動体8は、当該ドア23を通行する動作を中止した旨の通行の移動中止通知を管理装置9に送信する。管理装置9は、当該ドア23を物体の通行ができない状態にさせる指令を入退管理装置24に送信する。入退管理装置24は、当該ドア23を閉じた状態にする。
Further, when an obstacle exists in the path of the autonomous moving
その後、当該障害物が当該ドア23において自律移動体8の進路に継続して存在した場合、自律移動体8は、当該ドア23を通行する動作を行うたびに、当該ドア23を通行する動作を中止した旨の通行の移動中止通知を管理装置9に送信する。当該ドア23に関する通行の移動中止通知を受信した回数が規定の回数以上になった場合、管理装置9は、当該ドア23を使用しない設定にする。管理装置9は、当該ドア23が使用しない設定である場合、当該ドア23を通行する動作を行う通行の移動指令を自律移動体8に送信しない。
After that, if the obstacle continues to exist in the path of the autonomous moving
次に、図9を用いて、ゲート22とゲート22の待機領域とを説明する。
図9は実施の形態2における自律移動体の管理装置が適用されるゲートの上面図である。
Next, the
FIG. 9 is a top view of the gate to which the management device for the autonomous moving body according to the second embodiment is applied.
図9に示されるように、例えば、ゲート22は、レーン22aとレーン22bとレーン22cとを備える。レーン22aとレーン22bとレーン22cとは、図9には図示されない自律移動体8が通行し得るよう設けられる。
As shown in FIG. 9, for example, the
ゲート22の待機領域25は、外部エリアと共用エリアとにそれぞれ設定される。待機領域25は、待機領域25に存在する自律移動体8が速やかにゲート22を通行する動作を完了できる程度にゲート22に近い位置に設定される。待機領域25は、一対の待機領域25aと一対の待機領域25bと一対の待機領域25cとからなる。
The
一対の待機領域25aは、レーン22aに対応する。一対の待機領域25aは、外部エリアと共用エリアとのそれぞれにおけるレーン22aに隣接した位置に設定される。待機領域25bは、レーン22bに対応する。待機領域25bは、外部エリアと共用エリアとのそれぞれにおけるレーン22bに隣接した位置に設定される。待機領域25cは、レーン22cに対応する。待機領域25cは、外部エリアと共用エリアとのそれぞれにおけるレーン22cに隣接した位置に設定される。
The pair of
次に、図10を用いて、ドア23とドア23の待機領域とを説明する。
図10は実施の形態2における自律移動体の管理装置が適用されるドアの要部の上面図である。
Next, the
FIG. 10 is a top view of a main part of the door to which the management device for the autonomous moving body according to the second embodiment is applied.
図10に示されるように、例えば、ドア23は、ドアレーン23aとドアレーン23bとを備える。ドアレーン23aは、図10には図示されない自律移動体8が通行し得るよう設けられる。ドアレーン23bは、自律移動体8が通行し得るよう設けられる。
As shown in FIG. 10, for example, the
ドア23の待機領域26は、共用エリアと個別エリアとにそれぞれ設定される。待機領域26は、待機領域26に存在する自律移動体8が速やかにドア23を通行する動作を完了できる程度にドア23に近い位置に設定される。待機領域26は、一対の待機領域26aと一対の待機領域26bとからなる。
The waiting
一対の待機領域26aは、ドアレーン23aに対応する。一対の待機領域26aは、共用エリアと個別エリアとのそれぞれにおけるドアレーン23aに隣接した位置に設定される。一対の待機領域26bは、ドアレーン23bに対応する。一対の待機領域26bは、共用エリアと個別エリアとのそれぞれにおけるドアレーン23bに隣接した位置に設定される。
The pair of
次に、図11を用いて、管理装置9を説明する。
図11は実施の形態2における自律移動体の管理装置のブロック図である。
Next, the
FIG. 11 is a block diagram of the management device for the autonomous mobile body according to the second embodiment.
図11に示されるように、管理装置9は、第2位置情報取得部27と第2制御情報取得部28と第2移動指令部29と第2移動中止指令部30と第2中止通知記憶部31と第2中止通知受付部32と第2使用可否記憶部33と第2使用可否設定部34と状態変更部35とを備える。
As shown in FIG. 11, the
第2位置情報取得部27は、自律移動体8の位置を表す位置情報を当該自律移動体8から取得する。
The second position information acquisition unit 27 acquires the position information representing the position of the autonomous moving
第2制御情報取得部28は、出入口装置の制御情報としてゲート22と複数のドア23との制御情報を入退管理装置24から取得する。
The second control
第2移動指令部29は、第2制御情報取得部28が取得した出入口装置の制御情報を用いて出入口装置が通行できる状態であるか否かを判定する。第2移動指令部29は、出入口装置が通行できる状態であると判定した場合、第2位置情報取得部27が取得した位置情報を用いて自律移動体8が当該出入口装置の待機領域に存在するか否かを判定する。第2移動指令部29は、自律移動体8が当該出入口装置の待機領域に存在すると判定した場合、自律移動体8に当該出入口装置を通行する動作を行わせる通行の移動指令を当該自律移動体8に対して送信する。
The second
第2移動指令部29によって出入口装置が通行できる状態であると判定されたときに、第2移動中止指令部30は、時間の計測を開始する。第2移動中止指令部30は、自律移動体8が出入口装置を通行する動作を完了した場合、時間の計測を停止し、計測した時間をリセットする。
When the second
第2移動中止指令部30は、出入口装置が通行できる状態になってから規定の時間が経過したか否かを判定する。第2移動中止指令部30は、出入口装置が通行できる状態になってから規定の時間が経過したと判定したときに通行の移動指令を送信された自律移動体8が当該出入口を通行する動作を完了していない場合、第2移動指令部29が通行の移動指令を送信した自律移動体8に対して当該出入口装置を通行する動作を中止させる通行の移動中止指令を送信する。
The second movement
第2移動中止指令部30は、第2位置情報取得部27が取得した複数の自律移動体8の位置情報を用いて、複数の自律移動体8のうち第2移動指令部29が通行の移動指令を送信した自律移動体8ではない別の自律移動体8が当該出入口装置を通行する動作を行ったか否かを判定する。第2移動中止指令部30は、別の自律移動体8が当該出入口装置を通行する動作を行ったと判定した場合、第2移動指令部29が通行の移動指令を送信した自律移動体8に対して当該出入口装置を通行する動作を中止させる通行の移動中止指令を送信する。
The second movement
第2中止通知記憶部31は、自律移動体8が出入口装置を通行する動作を中止した旨を示す移動中止通知の履歴情報を記憶する。
The second stop
第2中止通知受付部32は、自律移動体8から送信される移動中止通知を受信する。第2中止通知受付部32は、移動中止通知を受信した場合、当該移動中止通知を反映した移動中止通知の履歴情報を第2中止通知記憶部31に記憶させる。
The second cancellation
第2使用可否記憶部33は、ある出入口装置に関して自律移動体8が当該出入口装置を使用する設定および使用しない設定のいずれに設定されているかを示す使用可否情報を記憶する。
The second
第2使用可否設定部34は、自律移動体8に通行の移動中止指令を送信していない状態で第2中止通知受付部32が当該自律移動体8からある出入口装置に関する通行の移動中止通知を受信したか否かを判定する。第2使用可否設定部34は、自律移動体8に通行の移動中止指令を送信していない状態で第2中止通知受付部32が当該自律移動体8からある出入口装置に関する通行の移動中止通知を受信したと判定した場合、第2中止通知記憶部31が記憶する移動中止通知の履歴情報を用いて、設定された日時からこれまでの間に当該出入口装置に関する通行の移動中止通知を受信した回数が規定の回数以上であるか否かを判定する。この際、第2中止通知受付部32は、全ての自律移動体8から送信された通行の移動中止通知の履歴情報を参照する。第2使用可否設定部34は、当該出入口装置に関する通行の移動中止通知を受信した回数が規定の回数以上であると判定した場合、当該出入口装置を使用しない設定にする。具体的には、この場合、第2使用可否設定部34は、第2使用可否記憶部33が記憶する使用可否情報において、当該出入口装置を使用しない設定にする。
The second usability setting unit 34 sends a notice of stop of movement of the passage related to the entrance / exit device from the
状態変更部35は、出入口装置を物体が通行できる状態にさせる指令を入退管理装置24に対して送信する。状態変更部35は、第2位置情報取得部27が取得した自律移動体8の位置情報を用いて、自律移動体8が出入口装置を通行する動作を完了したか否かを判定する。状態変更部35は、自律移動体8が出入口装置を通行する動作を完了したと判定した場合、入退管理装置24に対して当該出入口を物体が通行できない状態に変更させる指令を送信する。
The
次に、図12を用いて、第2中止通知記憶部31が記憶する移動中止通知の履歴情報を説明する。
図12は実施の形態2における自律移動体の管理装置が記憶する移動中止通知の履歴情報を表す図である。
Next, the history information of the movement stop notification stored in the second stop
FIG. 12 is a diagram showing the history information of the movement stop notification stored in the management device of the autonomous moving body in the second embodiment.
図12に示されるように、移動中止通知の履歴情報は、「通知日時」の情報と「通知元」の情報と「対象出入口装置」の情報とを対応付けた情報である。 As shown in FIG. 12, the history information of the movement cancellation notification is information in which the information of the "notification date and time", the information of the "notification source", and the information of the "target entrance / exit device" are associated with each other.
「通知日時」の情報は、自律移動体8から移動中止通知を受信した日付と時間との情報である。「通知元」の情報は、移動中止通知を発信した自律移動体8を識別する情報である。「対象装置」の情報は、自律移動体8が通行する動作を中止した対象の出入口装置を示す情報である。
The information of the "notification date and time" is the information of the date and time when the movement stop notification is received from the autonomous moving
次に、図13を用いて、第2使用可否記憶部33が記憶する使用可否情報を説明する。
図13は実施の形態2における自律移動体の管理装置が記憶する使用可否情報を表す図である。
Next, the usability information stored in the second
FIG. 13 is a diagram showing usability information stored in the management device of the autonomous mobile body in the second embodiment.
図13に示されるように、使用可否情報は、「対象出入口装置」の情報と「使用可否」の情報とを対応付けた情報である。 As shown in FIG. 13, the usability information is information in which the information of the “target entrance / exit device” and the information of the “usability” are associated with each other.
「対象出入口装置」の情報は、対象の出入口装置を示す情報である。「使用可否」の情報は、対象の出入口装置の状態が使用する設定または使用しない設定のいずれの状態であるかを示す情報である。 The information of the "target entrance / exit device" is information indicating the target entrance / exit device. The "availability" information is information indicating whether the state of the target entrance / exit device is the state of the setting to be used or the state of the setting not to be used.
「使用可否」の情報における「使用可」は、対象の出入口装置が使用する設定であることを示す。「使用可否」の情報における「使用不可」は、対象の出入口装置が使用しない設定であることを示す。 "Available" in the "Availability" information indicates that the setting is used by the target entrance / exit device. "Unavailable" in the "Availability" information indicates that the target entrance / exit device is not used.
次に、図14を用いて、管理装置9が行う動作を説明する。
図14は実施の形態2における自律移動体の管理装置が行う動作を説明するフローチャートである。
Next, the operation performed by the
FIG. 14 is a flowchart illustrating the operation performed by the management device of the autonomous moving body in the second embodiment.
例えば、管理装置9は、自律移動体8が出入口装置の待機領域へ移動を開始した場合に、ステップS201以降の動作を開始する。
For example, the
図14に示されるように、ステップS201において、管理装置9は、当該出入口装置が通行できる状態であるか否かを判定する。
As shown in FIG. 14, in step S201, the
ステップS201で、当該出入口装置が通行できる状態でないと判定した場合、管理装置9は、ステップS201の動作を繰り返す。
If it is determined in step S201 that the entrance / exit device is not in a passable state, the
ステップS201で、当該出入口装置が通行できる状態であると判定した場合、管理装置9は、ステップS202の動作を行う。ステップS202において、管理装置9は、自律移動体8が当該出入口装置の待機領域に存在するか否かを判定する。
If it is determined in step S201 that the entrance / exit device is in a passable state, the
ステップS202で、自律移動体8が当該出入口装置の待機領域に存在しないと判定した場合、管理装置9は、ステップS201以降の動作を行う。
If it is determined in step S202 that the autonomous moving
ステップS202で、自律移動体8が当該出入口装置の待機領域に存在すると判定した場合、管理装置9は、ステップS203の動作を行う。ステップS203において、管理装置9は、自律移動体8に当該出入口装置を通行する動作を行わせる通行の移動指令を当該自律移動体8に対して送信する。
When it is determined in step S202 that the autonomous moving
その後、管理装置9は、ステップS204の動作を行う。ステップS204において、管理装置9は、当該出入口装置が通行できる状態になってから規定の時間が経過したか否かを判定する。
After that, the
ステップS204で、当該出入口装置が通行できる状態になってから規定の時間が経過していないと判定した場合、管理装置9は、ステップS205の動作を行う。ステップS205において、管理装置9は、通行の移動指令を送信された自律移動体8ではない別の自律移動体8が当該出入口装置を通行する動作を行ったか否かを判定する。
If it is determined in step S204 that the specified time has not elapsed since the entrance / exit device became passable, the
ステップS205で、別の自律移動体8が当該出入口装置を通行する動作を行っていないと判定した場合、管理装置9は、ステップS206の動作を行う。ステップS206において、管理装置9は、自律移動体8に通行の移動中止指令を送信していない状態で当該自律移動体8から当該出入口装置に関する通行の移動中止通知を受信したか否かを判定する。
If it is determined in step S205 that another autonomous moving
ステップS206で、自律移動体8に通行の移動中止指令を送信していない状態で当該自律移動体8から当該出入口装置に関する通行の移動中止通知を受信していないと判定した場合、管理装置9は、ステップS207の動作を行う。ステップS207において、管理装置9は、自律移動体8が当該出入口装置を通行する動作を完了したか否かを判定する。
If it is determined in step S206 that the autonomous moving
ステップS207で、自律移動体8が当該出入口装置を通行する動作を完了していないと判定した場合、管理装置9は、ステップS204以降の動作を行う。
If it is determined in step S207 that the autonomous moving
ステップS207で、自律移動体8が当該出入口装置を通行する動作を完了したと判定した場合、管理装置9は、ステップS208の動作を行う。ステップS208において、管理装置9は、入退管理装置24に対して、当該出入口装置を物体が通行できない状態にさせる指令を送信する。
When it is determined in step S207 that the autonomous moving
その後、管理装置9は、動作を終了する。
After that, the
ステップS204で当該出入口装置が通行できる状態になってから規定の時間が経過したと判定した場合、またはステップS205で別の自律移動体8が当該出入口装置を通行する動作を行ったと判定した場合、管理装置9は、ステップS209の動作を行う。ステップS209において、管理装置9は、通行の移動指令を送信した自律移動体8に対して当該出入口装置を通行する動作を中止させる通行の移動中止指令を送信する。その後、管理装置9は、ステップS208以降の動作を行う。
When it is determined in step S204 that a specified time has elapsed since the doorway device became passable, or when it is determined in step S205 that another autonomous moving
ステップS206で、自律移動体8に通行の移動中止指令を送信していない状態で自律移動体8から当該出入口装置に関する通行の移動中止通知を受信したと判定した場合、管理装置9は、ステップS210の動作を行う。ステップS210において、管理装置9は、設定された日時からこれまでの間に当該出入口装置に関する通行の移動中止通知を受信した回数が規定の回数以上であるか否かを判定する。
If it is determined in step S206 that the traffic movement stop notification regarding the entrance / exit device has been received from the autonomous
ステップS210で、当該出入口装置が関係する移動中止通知を受信した回数が規定の回数未満であると判定した場合、管理装置9は、ステップS208以降の動作を行う。
If it is determined in step S210 that the number of times the entrance / exit device has received the movement stop notification is less than the specified number of times, the
ステップS210で、当該出入口装置が関係する移動中止通知を受信した回数が規定の回数以上であると判定した場合、管理装置9は、ステップS211の動作を行う。ステップS211において、管理装置9は、当該出入口装置を使用しない設定にする。その後、管理装置9は、ステップS208以降の動作を行う。
When it is determined in step S210 that the number of times the movement stop notification related to the entrance / exit device has been received is equal to or greater than the specified number of times, the
以上で説明した実施の形態2によれば、管理装置9は、出入口装置を通行する動作を行わせる移動指令を送信された自律移動体8に対して、当該出入口装置を通行する動作を中止させる移動中止指令を送信する。このため、管理装置9は、異常が発生した出入口装置を自律移動体8が通行することを抑制できる。管理装置9は、出入口装置と自律移動体8とが衝突することを抑制できる。その結果、自律移動体8が損傷することを抑制することができる。また、出入口装置が損傷することを抑制することができる。
According to the second embodiment described above, the
また、管理装置9は、出入口装置が通行できる状態になってから規定の時間が経過したときに、自律移動体8に対して通行の移動中止通知を送信する。このため、自律移動体8が出入口装置の通行に手間取った場合、当該出入口装置が時間制限によって開いた状態から閉じた状態になる前に、自律移動体8は、当該出入口装置から離れることができる。その結果、管理装置9は、自律移動体8と出入口装置とが衝突することを抑制することができる。
Further, the
また、管理装置9は、通行の移動指令を送信した自律移動体8とは別の自律移動体8が出入口装置を通行する動作を行った場合に、通行の移動指令を送信した自律移動体8に対して通行の移動中止指令を送信する。このため、通行の移動指令を送信した自律移動体8と別の自律移動体8とが衝突することを抑制することができる。
Further, the
また、例えば、従来の入退管理のシステムにおいて、ある自律移動体8が通行できないと判断した異常が出入口装置に発生したとしても、当該自律移動体8とは別の自律移動体8は、当該出入口装置を通行することがある。この場合、当該別の自律移動体8は、当該異常によって損傷することがある。実施の形態2によれば、管理装置9は、自律移動体8が出入口装置を通行する動作を中止した通行の移動中止通知を受信した場合、当該出入口装置を使用しない設定にする。このため、ある自律移動体8が通行できないと判断した出入口装置に異常が発生した場合、別の自律移動体8が当該出入口装置を通行することを抑制できる。その結果、自律移動体8が損傷することを抑制することができる。
Further, for example, in the conventional entrance / exit management system, even if an abnormality that is determined that a certain autonomous moving
また、管理装置9は、移動中止通知を受信した回数が規定の回数未満である場合には、当該出入口装置を使用しないようには設定しない。このため、出入口装置に異常が発生していないにも関わらず当該出入口装置を使用しない設定にされることで、自律移動体8が移動する効率が低下することを抑制することができる。
Further, the
また、管理装置9は、自律移動体8に通行の移動指令を送信した後に異常が発生した場合に、出入口装置を物体が通行できる状態から物体が通行できない状態へと変更させる指令を入退管理装置24に対して送信する。このため、管理装置9は、自律移動体8が出入口装置を通行することを抑制できる。その結果、自律移動体8が当該異常によって損傷することを抑制することができる。
Further, the
また、従来の入退管理のシステムにおいて、自律移動体8に通行の移動指令を送信した後に異常が発生したとしても、当該自律移動体8が出入口装置を通行する動作を完了するまで、当該出入口装置は、物体が通行できる状態のままであることがある。この場合、通行を許可されていない人間が当該出入口装置を通行する恐れがある。実施の形態2において、管理装置9は、自律移動体8に通行の移動指令を送信した後に異常が発生した場合に、出入口装置を物体の通行を許可する状態から物体の通行を許可しない状態へと変更させる指令を入退管理装置24に対して送信する。このため、通行を許可されていない人間が当該出入口を通行することを抑制することができる。その結果、入退管理のセキュリティを向上することができる。
Further, in the conventional entrance / exit management system, even if an abnormality occurs after transmitting a passage movement command to the autonomous moving
また、管理装置9は、出入口装置が通行できる状態になってから規定の時間が経過したときに、移動指令を送信された自律移動体8が出入口装置を通行する動作を完了していない場合、当該出入口装置を物体の通行を許可する状態から物体の通行を許可しない状態へと変更させる指令を入退管理装置24に対して送信する。このため、自律移動体8が出入口装置の通行に手間取った場合に、通行を許可されていない人間が当該出入口を通行することを抑制することができる。
Further, if the autonomous moving
また、管理装置9は、移動指令を送信された自律移動体8とは別の自律移動体8が出入口装置を通行する動作を行った場合に、当該出入口装置を物体の通行を許可する状態から物体の通行を許可しない状態へと変更させる指令を入退管理装置24に対して送信する。このため、管理装置9は、通行を許可されていない当該別の自律移動体8が当該出入口を通行することを抑制することができる。その結果、入退管理のセキュリティを向上することができる。
Further, when the
また、管理装置9は、自律移動体8が出入口装置の待機領域に存在する場合に当該自律移動体8に対して通行の移動指令を送信する。このため、自律移動体8は、通行の移動指令を送信された後、速やかに出入口装置を通行することができる。その結果、自律移動体8が出入口装置を通行する前に通行を許可されていない人間が当該出入口を通行することを抑制することができる。
Further, the
なお、管理装置9は、出入口装置を物体が通行できない状態にさせる指令を入退管理装置24に送信する代わりに、物体が通行できる状態にさせる指令を送信する前の状態に出入口装置の状態を戻す指令を入退管理装置24に送信してもよい。当該出入口装置の状態を前の状態に戻す指令を受信した場合、入退管理装置24は、出入口装置の状態を物体が通行できる状態にさせる指令を送信する前の状態に戻してもよい。
In addition, instead of transmitting the command to make the entrance / exit device impassable to the object to the entrance /
なお、出入口装置である複数のドア23の各々は、ドア23のパネルを施錠または解錠することで物体の通行を許可しない状態または物体の通行を許可する状態となってもよい。
Each of the plurality of
なお、ゲート22の待機領域25は、待機領域25に存在する自律移動体8が速やかにゲート22を通行する動作を完了できる程度にゲート22に近い位置であれば、図9に示される範囲でなくてもよい。ドア23の待機領域26は、待機領域26に存在する自律移動体8が速やかにドア23を通行する動作を完了できる程度にドア23に近い位置であれば、図10に示される範囲でなくてもよい。
The
なお、第2移動指令部29は、出入口装置が通行できる状態であるか否かを判定する際に、第2制御情報取得部28が取得した制御情報に含まれるゲート22の開閉状態の情報、またはドア23の開閉状態の情報を用いてもよい。
When the second
なお、第2移動指令部29は、出入口装置が通行できる状態であるか否かを判定する際に、第2使用可否記憶部33が記憶する使用可否情報を参照してもよい。第2使用可否記憶部33が記憶する使用可否情報において、当該出入口装置を使用しない設定である場合、第2移動指令部29は、第2制御情報取得部28が取得した制御情報の内容に関わらず当該出入口装置が通行できない状態であると判定してもよい。
The second
なお、第2移動指令部29は、自律移動体8が出入口装置の待機領域に存在するか否かを判定する際に、自律移動体8が出入口装置の待機領域に存在することを直接的に示す状態情報を自律移動体8から取得してもよい。具体的には、自律移動体8は、出入口装置の待機領域にいること検知することで当該状態情報を作成してもよい。第2移動指令部29は、自律移動体8の位置情報の代わりに当該状態情報を用いて自律移動体8が出入口装置の待機領域に存在すると判定してもよい。
When the second
なお、第2移動中止指令部30は、別の自律移動体8が出入口装置を通行する動作を行ったか否かを判定する際に、当該別の自律移動体8が出入口装置を通行する動作を行ったことを直接的に示す状態情報を当該別の自律移動体8から取得してもよい。第2移動中止指令部30は、当該別の自律移動体8の位置情報の代わりに当該状態情報を用いて当該別の自律移動体8が出入口装置を通行する動作を行ったと判定してもよい。
The second movement
なお、第2移動中止指令部30は、別の自律移動体8が出入口装置を通行しようとする動作を行った場合、別の自律移動体8が出入口装置を通行する動作を行ったと判定してもよい。具体的には、第2移動中止指令部30は、複数の自律移動体8の位置情報を用いて別の自律移動体8がゲート22の待機領域25に移動したことを検知した場合、別の自律移動体8がゲート22を通行する動作を行ったと判定してもよい。
The second movement
なお、第2使用可否設定部34は、出入口装置に関する通行の移動中止通知を受信した回数が規定の回数以上であるか否かを判定する際に、判定する時点から規定の期間内に受信した通行の移動中止通知の履歴情報を用いてもよい。 In addition, when determining whether or not the number of times the traffic stop notice regarding the entrance / exit device has been received is equal to or more than the specified number of times, the second usability setting unit 34 has received the notification within the specified period from the time of the determination. You may use the history information of the traffic stop notice.
なお、状態変更部35は、自律移動体8が出入口装置を通行する動作を完了したか否かを判定する際に、自律移動体8が出入口装置を通行する動作を完了したことを直接的に示す状態情報を自律移動体8から取得してもよい。状態変更部35は、自律移動体8の位置情報の代わりに当該状態情報を用いて自律移動体8が出入口装置を通行する動作を完了したと判定してもよい。
When determining whether or not the autonomous moving
なお、実施の形態1および実施の形態2において、管理装置9は、複数の自律移動体8の移動を一括で制御する装置を備えた自律移動体の制御システムに適用してもよい。この場合、管理装置9は、各種の指令を自律移動体8に送信する代わりに複数の自律移動体8の移動を一括で制御する装置に送信してもよい。
In the first and second embodiments, the
1 エレベーターシステム、 2 昇降路、 3 機械室、 4 乗場、 5 かご、 6 かごドア、 7 制御装置、 8 自律移動体、 9 管理装置、 10 第1位置情報取得部、 11 第1制御情報取得部、 12 登録部、 13 第1移動指令部、 14 第1移動中止指令部、 15 第1中止通知記憶部、 16 第1中止通知受付部、 17 退避情報送信部、 18 第1使用可否記憶部、 19 第1使用可否設定部、 20 運転開始指令部、 21 運転中止指令部、 22 ゲート、 22a,22b,22c レーン、 23 ドア、 23a,23b ドアレーン、 24 入退管理装置、 25,25a,25b,25c 待機領域、 26,26a,26b 待機領域、 27 第2位置情報取得部、 28 第2制御情報取得部、 29 第2移動指令部、 30 第2移動中止指令部、 31 第2中止通知記憶部、 32 第2中止通知受付部、 33 第2使用可否記憶部、 34 第2使用可否設定部、 35 状態変更部、 100a プロセッサ、 100b メモリ、 200 ハードウェア 1 elevator system, 2 hoistway, 3 machine room, 4 landing, 5 car, 6 car door, 7 control device, 8 autonomous moving body, 9 management device, 10 1st position information acquisition unit, 11 1st control information acquisition unit , 12 Registration unit, 13 1st movement command unit, 14 1st movement stop command unit, 15 1st stop notification storage unit, 16 1st stop notification reception unit, 17 save information transmission unit, 18 1st usability storage unit, 19 1st availability setting unit, 20 operation start command unit, 21 operation stop command unit, 22 gate, 22a, 22b, 22c lane, 23 door, 23a, 23b door lane, 24 entry / exit control device, 25, 25a, 25b, 25c standby area, 26, 26a, 26b standby area, 27 second position information acquisition unit, 28 second control information acquisition unit, 29 second movement command unit, 30 second movement stop command unit, 31 second stop notification storage unit. , 32 2nd cancel notification reception unit, 33 2nd usability storage unit, 34 2nd usability setting unit, 35 status change unit, 100a processor, 100b memory, 200 hardware
Claims (13)
前記移動指令部から前記移動指令を送信された前記自律移動体に対して、前記かごへ乗車する動作または前記かごから降車する動作を中止させる指令を送信する移動中止指令部と、
前記移動指令部から前記移動指令を送信された前記自律移動体とは別の自律移動体が前記かごへ乗車する動作を行った場合に、前記エレベーターの制御装置に対して前記かごの運転を中止させる指令を送信する運転中止指令部と、
を備え、
前記移動中止指令部は、前記移動指令部から前記移動指令を送信された前記自律移動体とは別の自律移動体が前記かごへ乗車する動作を行った場合に、前記移動指令部から前記移動指令を送信された前記自律移動体に対して前記かごへ乗車する動作または前記かごから降車する動作を中止させる指令を送信する自律移動体の管理装置。 A movement command unit that sends a movement command to an autonomous moving body that moves autonomously to get in or out of the elevator car.
A movement stop command unit that transmits a command to stop the operation of getting into the car or the operation of getting off the car to the autonomous moving body to which the movement command is transmitted from the movement command unit.
When an autonomous moving body other than the autonomous moving body to which the moving command is transmitted from the movement command unit performs an operation of getting into the car, the operation of the car is stopped with respect to the control device of the elevator. The operation stop command unit that sends the command to send
Equipped with
The movement stop command unit moves from the movement command unit when an autonomous moving body other than the autonomous moving body to which the movement command is transmitted from the movement command unit performs an operation of getting into the car. A management device for an autonomous moving body that transmits a command to the autonomous moving body to which a command is transmitted to stop the operation of getting into the car or the operation of getting off the car .
を備えた請求項1または請求項2に記載の自律移動体の管理装置。 When the autonomous moving body to which the movement command is transmitted from the movement command unit receives a stop notification to the effect that the operation of getting into the car or the operation of getting off the car is stopped, the autonomous moving body moves the car. Usability setting unit, which is set not to be used,
The management device for an autonomous mobile body according to claim 1 or 2 .
を備えた請求項1から請求項4のいずれか一項に記載の自律移動体の管理装置。 While the autonomous moving body to which the movement command was transmitted from the movement command unit was in the car, the car could not drive to the destination floor of the autonomous moving body and stopped on a floor different from the destination floor. In this case, the evacuation information transmission unit that transmits information on the position where the autonomous moving object is to be evacuated to the autonomous moving body on a floor different from the destination floor.
The management device for an autonomous mobile body according to any one of claims 1 to 4, wherein the autonomous moving body is managed.
前記移動指令部から前記移動指令を送信された前記自律移動体に対して、前記出入口装置を通行する動作を中止させる指令を送信する移動中止指令部と、
前記出入口装置を物体が通行できる状態にさせる指令を送信し、前記出入口装置を物体が通行できる状態にさせる指令を送信した後、前記移動指令部から前記移動指令を送信された前記自律移動体が前記出入口装置を通行する動作を完了するまでに異常が発生した場合に、前記出入口装置を物体が通行できない状態にさせる指令を送信する状態変更部と、
を備え、
前記移動中止指令部は、前記移動指令部から前記移動指令を送信された前記自律移動体とは別の自律移動体が前記出入口装置を通行する動作を行った場合に、前記移動指令部から前記移動指令を送信された前記自律移動体に対して前記出入口装置を通行する動作を中止させる指令を送信する自律移動体の管理装置。 A movement command unit that sends a movement command that causes an autonomous moving body that moves autonomously to perform an operation of passing through an entrance / exit device, and a movement command unit.
A movement stop command unit that transmits a command to stop the operation of passing through the entrance / exit device to the autonomous moving body to which the movement command is transmitted from the movement command unit.
After transmitting a command to make the doorway device in a state where an object can pass, and transmitting a command to make the doorway device into a state in which an object can pass, the autonomous moving body to which the movement command is transmitted from the movement command unit A state change unit that transmits a command to make the doorway device impassable to an object when an abnormality occurs before the operation of passing through the doorway device is completed.
Equipped with
The movement stop command unit is described by the movement command unit when an autonomous mobile body other than the autonomous mobile unit to which the movement command is transmitted from the movement command unit performs an operation of passing through the entrance / exit device. A management device for an autonomous mobile body that transmits a command to stop the operation of passing through the entrance / exit device to the autonomous mobile body to which a movement command is transmitted.
を備えた請求項6または請求項7に記載の自律移動体の管理装置。 When the autonomous moving body to which the movement command is transmitted receives a stop notification to the effect that the operation of passing through the doorway device is stopped, the autonomous moving body is prevented from using the doorway device. Usability setting part to set and
The management device for an autonomous mobile body according to claim 6 or 7 .
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021026313A JP7081704B1 (en) | 2021-02-22 | 2021-02-22 | Autonomous mobile body management device |
| CN202410526590.5A CN118192611A (en) | 2021-02-22 | 2021-08-05 | Management device for autonomous mobile body |
| CN202110895797.6A CN114955755B (en) | 2021-02-22 | 2021-08-05 | Management device for autonomous mobile body |
| CN202410526581.6A CN118183410A (en) | 2021-02-22 | 2021-08-05 | Management device for autonomous mobile body |
| CN202410525949.7A CN118183409A (en) | 2021-02-22 | 2021-08-05 | Management device for autonomous mobile body |
| JP2022084952A JP7331990B2 (en) | 2021-02-22 | 2022-05-25 | Autonomous mobile body management device |
| JP2022084953A JP7331991B2 (en) | 2021-02-22 | 2022-05-25 | Autonomous mobile body management device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021026313A JP7081704B1 (en) | 2021-02-22 | 2021-02-22 | Autonomous mobile body management device |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022084952A Division JP7331990B2 (en) | 2021-02-22 | 2022-05-25 | Autonomous mobile body management device |
| JP2022084953A Division JP7331991B2 (en) | 2021-02-22 | 2022-05-25 | Autonomous mobile body management device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP7081704B1 true JP7081704B1 (en) | 2022-06-07 |
| JP2022128021A JP2022128021A (en) | 2022-09-01 |
Family
ID=81926035
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021026313A Active JP7081704B1 (en) | 2021-02-22 | 2021-02-22 | Autonomous mobile body management device |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7081704B1 (en) |
| CN (4) | CN118183410A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7434652B1 (en) | 2023-07-03 | 2024-02-20 | 東芝エレベータ株式会社 | elevator system |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7468738B1 (en) | 2023-03-29 | 2024-04-16 | 三菱電機ビルソリューションズ株式会社 | Elevator system, relay device, control method for relay device, and program |
| JP7548462B1 (en) | 2024-03-06 | 2024-09-10 | 三菱電機ビルソリューションズ株式会社 | Traffic management device, traffic management method, traffic management program, mobile body system, and mobile body control system |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011042444A (en) | 2009-08-20 | 2011-03-03 | Toshiba Elevator Co Ltd | Elevator device coping with automated guided vehicle and failure detecting method of the elevator device |
| JP2017220122A (en) | 2016-06-09 | 2017-12-14 | パナソニックIpマネジメント株式会社 | Mobile robot |
| WO2020250409A1 (en) | 2019-06-14 | 2020-12-17 | 三菱電機株式会社 | Elevator link device |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3844570B2 (en) * | 1997-10-02 | 2006-11-15 | 富士通株式会社 | Automated guided vehicle |
| JP4669023B2 (en) * | 2007-05-21 | 2011-04-13 | パナソニック株式会社 | Automatic transfer method, transfer robot, and automatic transfer system |
| DE112016007313B4 (en) * | 2016-10-04 | 2022-04-28 | Mitsubishi Electric Corporation | elevator control device and autonomous moving body control device |
| JP6619760B2 (en) * | 2017-03-06 | 2019-12-11 | 株式会社日立ビルシステム | Elevator apparatus, elevator system, and autonomous robot control method |
| DE112018007833T5 (en) * | 2018-07-17 | 2021-04-15 | Mitsubishi Electric Corporation | Elevator system |
| JP6748238B2 (en) * | 2019-01-08 | 2020-08-26 | 東芝エレベータ株式会社 | Elevator apparatus, elevator system, and control method for elevator apparatus |
| JP6668520B1 (en) * | 2019-02-07 | 2020-03-18 | 東芝エレベータ株式会社 | Elevator control device and elevator operating method |
| JP6682672B1 (en) * | 2019-02-08 | 2020-04-15 | 東芝エレベータ株式会社 | Elevator system, elevator group management control device, and elevator number allocation method |
-
2021
- 2021-02-22 JP JP2021026313A patent/JP7081704B1/en active Active
- 2021-08-05 CN CN202410526581.6A patent/CN118183410A/en active Pending
- 2021-08-05 CN CN202110895797.6A patent/CN114955755B/en active Active
- 2021-08-05 CN CN202410525949.7A patent/CN118183409A/en active Pending
- 2021-08-05 CN CN202410526590.5A patent/CN118192611A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011042444A (en) | 2009-08-20 | 2011-03-03 | Toshiba Elevator Co Ltd | Elevator device coping with automated guided vehicle and failure detecting method of the elevator device |
| JP2017220122A (en) | 2016-06-09 | 2017-12-14 | パナソニックIpマネジメント株式会社 | Mobile robot |
| WO2020250409A1 (en) | 2019-06-14 | 2020-12-17 | 三菱電機株式会社 | Elevator link device |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7434652B1 (en) | 2023-07-03 | 2024-02-20 | 東芝エレベータ株式会社 | elevator system |
Also Published As
| Publication number | Publication date |
|---|---|
| CN118183410A (en) | 2024-06-14 |
| JP2022128021A (en) | 2022-09-01 |
| CN114955755A (en) | 2022-08-30 |
| CN118192611A (en) | 2024-06-14 |
| CN118183409A (en) | 2024-06-14 |
| CN114955755B (en) | 2024-05-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7081704B1 (en) | Autonomous mobile body management device | |
| JP5003573B2 (en) | Autonomous mobile robot and its elevator getting-on / off method | |
| JP5556831B2 (en) | Elevator getting on and off of autonomous mobile robot | |
| KR101292457B1 (en) | Elevator group management system | |
| WO2018066056A1 (en) | Elevator system | |
| JP6125842B2 (en) | Elevator operation control device | |
| JP7331991B2 (en) | Autonomous mobile body management device | |
| CN106414297B (en) | Method for using an elevator system and elevator system | |
| JP2014172695A (en) | Elevator group management control device | |
| JP7331990B2 (en) | Autonomous mobile body management device | |
| JP6824466B2 (en) | Elevator | |
| JP7501721B2 (en) | Autonomous mobile unit management device | |
| JP4411101B2 (en) | Wheelchair / elevator operation control device | |
| JP2012180185A (en) | Elevator group managing control device | |
| KR20190095783A (en) | Method and system for controlling operation of elevator | |
| JP7577788B2 (en) | Robot-linked elevator control system and control method | |
| CN114955805A (en) | Elevator control device and building system | |
| JP7550268B2 (en) | Robot-linked elevator control system | |
| KR102701767B1 (en) | Robotic Linked Elevator Control System and Method | |
| JP2021080083A (en) | Elevator system and control method for elevator | |
| KR102630551B1 (en) | Robotic Interlocking Elevator Control System | |
| JP6268079B2 (en) | Elevator control device | |
| KR102361662B1 (en) | Car call control device for hybrid destination selecting system | |
| JP7311008B1 (en) | Elevator system, linking device, linking method, and linking program | |
| JP5669202B2 (en) | Multi-direction elevator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210222 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20211119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220331 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220426 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220509 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7081704 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |