JP6952002B2 - Control method for human-powered vehicle system and human-powered vehicle system - Google Patents
Control method for human-powered vehicle system and human-powered vehicle system Download PDFInfo
- Publication number
- JP6952002B2 JP6952002B2 JP2018066078A JP2018066078A JP6952002B2 JP 6952002 B2 JP6952002 B2 JP 6952002B2 JP 2018066078 A JP2018066078 A JP 2018066078A JP 2018066078 A JP2018066078 A JP 2018066078A JP 6952002 B2 JP6952002 B2 JP 6952002B2
- Authority
- JP
- Japan
- Prior art keywords
- information
- human
- state
- powered vehicle
- control unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 95
- 238000004891 communication Methods 0.000 claims description 109
- 230000005540 biological transmission Effects 0.000 claims description 26
- 230000001105 regulatory effect Effects 0.000 claims description 22
- 239000000725 suspension Substances 0.000 claims description 18
- 230000008859 change Effects 0.000 claims description 17
- 230000001276 controlling effect Effects 0.000 claims description 15
- 230000008569 process Effects 0.000 description 68
- 238000012545 processing Methods 0.000 description 20
- 230000006870 function Effects 0.000 description 13
- 230000007246 mechanism Effects 0.000 description 10
- 238000010586 diagram Methods 0.000 description 5
- 238000012508 change request Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000004044 response Effects 0.000 description 3
- 230000003213 activating effect Effects 0.000 description 2
- 238000013016 damping Methods 0.000 description 2
- 230000003139 buffering effect Effects 0.000 description 1
- 239000003638 chemical reducing agent Substances 0.000 description 1
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J50/00—Arrangements specially adapted for use on cycles not provided for in main groups B62J1/00 - B62J45/00
- B62J50/20—Information-providing devices
- B62J50/21—Information-providing devices intended to provide information to rider or passenger
- B62J50/22—Information-providing devices intended to provide information to rider or passenger electronic, e.g. displays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J1/00—Saddles or other seats for cycles; Arrangement thereof; Component parts
- B62J1/08—Frames for saddles; Connections between saddle frames and seat pillars; Seat pillars
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62L—BRAKES SPECIALLY ADAPTED FOR CYCLES
- B62L3/00—Brake-actuating mechanisms; Arrangements thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62L—BRAKES SPECIALLY ADAPTED FOR CYCLES
- B62L3/00—Brake-actuating mechanisms; Arrangements thereof
- B62L3/06—Means for locking the actuating mechanisms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/45—Control or actuating devices therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M9/00—Transmissions characterised by use of an endless chain, belt, or the like
- B62M9/04—Transmissions characterised by use of an endless chain, belt, or the like of changeable ratio
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J43/00—Arrangements of batteries
- B62J43/20—Arrangements of batteries characterised by the mounting
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62J—CYCLE SADDLES OR SEATS; AUXILIARY DEVICES OR ACCESSORIES SPECIALLY ADAPTED TO CYCLES AND NOT OTHERWISE PROVIDED FOR, e.g. ARTICLE CARRIERS OR CYCLE PROTECTORS
- B62J43/00—Arrangements of batteries
- B62J43/30—Arrangements of batteries for providing power to equipment other than for propulsion
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
本発明は、人力駆動車用システムおよび人力駆動車用システムの制御方法に関する。 The present invention relates to a human-powered vehicle system and a method for controlling a human-powered vehicle system.
例えば、特許文献1に開示されている人力駆動車用システムは、第1電気コンポーネントと第2電気コンポーネントとの間で認証を行っている。 For example, the human-powered vehicle system disclosed in Patent Document 1 certifies between the first electric component and the second electric component.
人力駆動車用システムは、外部装置との通信に応じて電気コンポーネントの動作状態を変更することについては想定していない。
本発明の目的は、外部装置を用いて電気コンポーネントの状態を変更することができる人力駆動車用システムおよび人力駆動車用システムの制御方法を提供することである。
Human-powered vehicle systems do not anticipate changing the operating state of electrical components in response to communication with external devices.
An object of the present invention is to provide a system for a human-powered vehicle and a method for controlling a system for a human-powered vehicle, which can change the state of an electric component by using an external device.
本発明の第1側面に従う人力駆動車用システムは、第1情報を記憶する第1記憶部、および、外部装置と通信可能な第1通信部を備える人力駆動車用の第1電気コンポーネントと、第2情報を記憶する第2記憶部、および、前記第1通信部と通信可能な第2通信部を備え、第1状態と、前記第1状態とは異なる第2状態とを切り替えて動作するように構成される前記人力駆動車用の第2電気コンポーネントと、を含み、前記外部装置と前記第1通信部とが通信可能に接続される場合において、前記第1情報と前記外部装置に入力または記憶される第3情報とが対応し、かつ、前記第1情報と前記第2情報とが対応する場合、前記第1情報と前記第3情報とが対応し、かつ、前記第2情報と前記第3情報とが対応する場合、または、前記第2情報と前記第3情報とが対応し、かつ、前記第1情報と前記第2情報とが対応する場合、前記第2電気コンポーネントは、前記第1状態から前記第2状態に切り替わる。
第1側面の人力駆動車用システムによれば、外部装置を用いて第2電気コンポーネントの状態を変更することができる。
A human-powered vehicle system according to the first aspect of the present invention comprises a first storage unit for storing first information and a first electrical component for a human-powered vehicle including a first communication unit capable of communicating with an external device. It includes a second storage unit that stores the second information and a second communication unit that can communicate with the first communication unit, and operates by switching between the first state and the second state different from the first state. When the external device and the first communication unit are communicably connected, the first information and the external device are input to include the second electric component for the human-powered vehicle configured as described above. Alternatively, when the stored third information corresponds to each other and the first information corresponds to the second information, the first information corresponds to the third information and the second information corresponds to the second information. When the third information corresponds to each other, or when the second information corresponds to the third information and the first information corresponds to the second information, the second electric component is subjected to. The first state is switched to the second state.
According to the human-powered vehicle system on the first side, the state of the second electrical component can be changed using an external device.
前記第1側面に従う第2側面の人力駆動車用システムにおいて、前記第1状態では、前記第2電気コンポーネントの少なくとも1つの機能が制限され、前記第2状態では、前記第2電気コンポーネントの前記少なくとも1つの機能が制限されない。
第2側面の人力駆動車用システムによれば、外部装置を用いて第2電気コンポーネントの状態を、少なくとも1つの機能が制限される第1状態と、少なくとも1つの機能が制限されない第2状態とに切り替えることができる。
In a second-side human-powered vehicle system according to the first aspect, at least one function of the second electrical component is restricted in the first state, and at least one of the second electrical components in the second state. One function is not limited.
According to the human-powered vehicle system on the second side, the state of the second electrical component is determined by using an external device to be a first state in which at least one function is restricted and a second state in which at least one function is not restricted. Can be switched to.
前記第1または第2側面に従う第3側面の人力駆動車用システムにおいて、前記第1通信部は、前記外部装置に前記第1情報を送信するように構成され、前記外部装置は、前記第1情報に対応する前記第3情報が入力された場合、または、前記外部装置に前記第1情報に対応する前記第3情報が記憶されている場合、前記第1通信部に前記第2電気コンポーネントを前記第1状態から前記第2状態に切り替えるための第4情報を送信するように構成される。
第3側面の人力駆動車用システムによれば、第1情報に対応する第3情報が外部装置に
入力された場合、または、第1電気コンポーネントに記憶される第1情報に対応する第3情報が外部装置に記憶されている場合、外部装置から送信される第4情報によって第2電気コンポーネントを第1状態から第2状態に切り替えることができる。
In the human-powered vehicle system of the third side according to the first or second side surface, the first communication unit is configured to transmit the first information to the external device, and the external device is the first. When the third information corresponding to the information is input, or when the third information corresponding to the first information is stored in the external device, the second electric component is installed in the first communication unit. It is configured to transmit the fourth information for switching from the first state to the second state.
According to the human-powered vehicle system of the third aspect, when the third information corresponding to the first information is input to the external device, or the third information corresponding to the first information stored in the first electric component. Is stored in the external device, the second electrical component can be switched from the first state to the second state by the fourth information transmitted from the external device.
前記第1または第2側面に従う第4側面の人力駆動車用システムにおいて、前記第1電気コンポーネントおよび前記第2電気コンポーネントの少なくとも一方は、前記第1通信部が前記外部装置から受信した前記第3情報が前記第1情報または前記第2情報に対応しているか否かを判定する第1判定部をさらに含む。
第4側面の人力駆動車用システムによれば、第1電気コンポーネントおよび第2電気コンポーネントの少なくとも一方に含まれる第1判定部によって、第3情報と第1情報または第2情報とが対応しているか否かを判定できる。
In the human-powered vehicle system of the fourth side according to the first or second side surface, at least one of the first electric component and the second electric component is the third that the first communication unit receives from the external device. A first determination unit for determining whether or not the information corresponds to the first information or the second information is further included.
According to the human-powered vehicle system of the fourth aspect, the third information and the first information or the second information correspond to each other by the first determination unit included in at least one of the first electric component and the second electric component. Whether or not it can be determined.
前記第1〜第4側面のいずれか1つに従う第5側面の人力駆動車用システムにおいて、前記第1電気コンポーネントおよび前記第2電気コンポーネントの少なくとも一方は、前記第2情報が前記第1情報に対応しているか否かを判定する第2判定部をさらに含む。
第5側面の人力駆動車用システムによれば、第1電気コンポーネントおよび第2電気コンポーネントの少なくとも一方に含まれる第2判定部によって、第2情報と第1情報とが対応しているか否かを判定できる。
In the human-powered vehicle system on the fifth side according to any one of the first to fourth sides, at least one of the first electric component and the second electric component has the second information as the first information. It further includes a second determination unit that determines whether or not it corresponds.
According to the system for a human-powered vehicle on the fifth side, whether or not the second information and the first information correspond to each other by the second determination unit included in at least one of the first electric component and the second electric component. Can be judged.
前記第5側面に従う第6側面の人力駆動車用システムにおいて、前記第2判定部は、前記第2電気コンポーネントに含まれ、前記第1通信部は、前記第1情報を前記第2通信部に送信するように構成される。
第6側面の人力駆動車用システムによれば、第2電気コンポーネントが第1通信部から送信された第1情報が第2情報と対応しているか否かを判定できる。
In the human-powered vehicle system on the sixth side according to the fifth side surface, the second determination unit is included in the second electric component, and the first communication unit transfers the first information to the second communication unit. Configured to send.
According to the human-powered vehicle system of the sixth aspect, the second electric component can determine whether or not the first information transmitted from the first communication unit corresponds to the second information.
前記第1〜第6側面のいずれか1つに従う第7側面の人力駆動車用システムにおいて、前記第1記憶部は、前記第1情報を変更可能に記憶する。
第7側面の人力駆動車用システムによれば、第1情報を変更できるため、人力駆動車用システムのセキュリティを向上できる。また、対応付けたい第2電気コンポーネントの第2情報または外部装置の第3情報に応じて第1情報を変更できるため、ユーザビリティを向上できる。
In the human-powered vehicle system on the seventh side according to any one of the first to sixth sides, the first storage unit stores the first information in a modifiable manner.
According to the human-powered vehicle system on the seventh side, the security of the human-powered vehicle system can be improved because the first information can be changed. Further, since the first information can be changed according to the second information of the second electric component to be associated or the third information of the external device, usability can be improved.
前記第1〜第7側面のいずれか1つに従う第8側面の人力駆動車用システムにおいて、前記第2記憶部は、前記第2情報を変更可能に記憶する。
第8側面の人力駆動車用システムによれば、第2情報を変更できるため、人力駆動車用システムのセキュリティを向上できる。また、対応付けたい第1電気コンポーネントの第1情報または外部装置の第3情報に応じて第2情報を変更できるため、ユーザビリティを向上できる。
In the human-powered vehicle system on the eighth side according to any one of the first to seventh sides, the second storage unit stores the second information in a modifiable manner.
According to the human-powered vehicle system on the eighth side, the second information can be changed, so that the security of the human-powered vehicle system can be improved. Further, since the second information can be changed according to the first information of the first electric component to be associated or the third information of the external device, usability can be improved.
前記第7側面に従う第9側面の人力駆動車用システムにおいて、前記第2記憶部は、前記第2情報を変更可能に記憶し、前記第1情報は、第1手順で変更され、前記第2情報は、前記第1手順とは異なる第2手順で変更される。
第9側面の人力駆動車用システムによれば、第1情報と第2情報とを変更する場合、異なる手順で変更する必要があるので、セキュリティを向上できる。
In the human-powered vehicle system on the ninth side according to the seventh side, the second storage unit mutably stores the second information, and the first information is changed in the first procedure, and the second information is changed. The information is changed in a second procedure different from the first procedure.
According to the human-powered vehicle system of the ninth aspect, when the first information and the second information are changed, it is necessary to change them in different procedures, so that the security can be improved.
前記第9側面に従う第10側面の人力駆動車用システムにおいて、前記第2電気コンポーネントは、前記第2記憶部を制御する記憶制御部を含み、前記第2手順は、前記外部装置から前記第2電気コンポーネントへの前記第2情報の入力を含み、前記記憶制御部は、前記外部装置から前記第2情報が入力された場合、前記第2情報を変更するように前記第2記憶部を制御する。
第10側面の人力駆動車用システムによれば、外部装置から第2電気コンポーネントに第2情報が入力されることによって第2情報を変更できる。
In the human-powered vehicle system on the tenth side according to the ninth side surface, the second electric component includes a storage control unit that controls the second storage unit, and the second procedure is the second from the external device. The storage control unit controls the second storage unit so as to change the second information when the second information is input from the external device, including the input of the second information to the electric component. ..
According to the human-powered vehicle system on the tenth side, the second information can be changed by inputting the second information from the external device to the second electric component.
前記第1〜第10側面のいずれか1つに従う第11側面の人力駆動車用システムにおいて、前記第2電気コンポーネントは、前記第1情報、前記第2情報、および、前記第3情報に応じて、前記第1状態と前記第2状態とを切り替える第1制御状態と、前記第1情報、前記第2情報、および、前記第3情報に応じて、前記第1状態と前記第2状態とを切り替えない第2制御状態と、を切り替えて動作するように構成される。
第11側面の人力駆動車用システムによれば、ユーザの必要に応じて第1状態と第2状態とを切り替える第1制御状態と、第1状態と第2状態とを切り替えない第2制御状態とを切り替えることができる。
In a human-powered vehicle system on the eleventh aspect according to any one of the first to tenth aspects, the second electrical component responds to the first information, the second information, and the third information. A first control state for switching between the first state and the second state, and the first state and the second state according to the first information, the second information, and the third information. It is configured to operate by switching between the second control state that does not switch.
According to the human-powered vehicle system on the eleventh side, a first control state that switches between the first state and the second state according to the user's needs, and a second control state that does not switch between the first state and the second state. And can be switched.
前記第1〜第11側面のいずれか1つに従う第12側面の人力駆動車用システムにおいて、前記第2電気コンポーネントは、前記人力駆動車の走行を物理的に規制する規制状態と、前記人力駆動車の走行を許容する解除状態と、を切り替え可能なロック装置を制御するロック制御部をさらに含み、前記ロック制御部は、前記第2電気コンポーネントが前記第1状態の場合に前記ロック装置を前記規制状態にし、前記第2電気コンポーネントが前記第2状態の場合に前記ロック装置を前記解除状態にする。
第12側面の人力駆動車用システムによれば、第2電気コンポーネントが第1状態の場合に人力駆動車の走行を物理的に規制できる。
In the system for a human-powered vehicle on the twelfth side according to any one of the first to eleventh surfaces, the second electric component is in a regulated state that physically regulates the running of the human-powered vehicle and the human-powered drive. The lock control unit further includes a lock control unit that controls a lock device that can switch between a release state that allows the vehicle to travel and a lock device that can switch between the lock control unit and the lock device when the second electric component is in the first state. The regulated state is set, and when the second electric component is in the second state, the locking device is put into the unlocked state.
According to the system for the human-powered vehicle on the twelfth side surface, the running of the human-powered vehicle can be physically regulated when the second electric component is in the first state.
前記第1〜第11側面のいずれか1つに従う第13側面の人力駆動車用システムにおいて、前記第2電気コンポーネントは、前記人力駆動車の走行を物理的に規制する規制状態と、前記人力駆動車の走行を許容する解除状態と、を切り替え可能なロック装置をさらに含み、前記第2電気コンポーネントが前記第1状態の場合に前記ロック装置は前記規制状態となり、前記第2電気コンポーネントが前記第2状態の場合に前記ロック装置は前記解除状態となる。
第13側面の人力駆動車用システムによれば、第2電気コンポーネントが第1状態の場合に、ロック装置を規制状態にできるため、人力駆動車の走行を物理的に規制できる。
In the system for a human-powered vehicle on the thirteenth side according to any one of the first to eleventh surfaces, the second electric component is in a regulated state that physically regulates the running of the human-powered vehicle and the human-powered drive. It further includes a lock device capable of switching between an unlocked state that allows the vehicle to travel, and when the second electric component is in the first state, the lock device is in the restricted state, and the second electric component is in the first state. In the case of two states, the lock device is in the unlocked state.
According to the system for the human-powered vehicle on the thirteenth side, when the second electric component is in the first state, the locking device can be in the regulated state, so that the traveling of the human-powered vehicle can be physically regulated.
前記第12または第13側面に従う第14側面の人力駆動車用システムにおいて、前記ロック装置は、ブレーキ装置を含む。
第14側面の人力駆動車用システムによれば、ブレーキ装置によって人力駆動車の走行を物理的に規制できる。
In a system for a human-powered vehicle on a fourteenth side according to the twelfth or thirteenth side, the locking device includes a braking device.
According to the human-powered vehicle system on the fourteenth side, the running of the human-powered vehicle can be physically regulated by the braking device.
前記第13側面に従う第15側面の人力駆動車用システムにおいて、前記ロック装置は、前記規制状態の場合、前記人力駆動車のクランクの回転を物理的に規制するように構成される。
第15側面の人力駆動車用システムによれば、ロック装置が人力駆動車のクランクの回転を物理的に規制することによって、人力駆動車の走行を物理的に規制できる。
In the system for a human-powered vehicle on the fifteenth side according to the thirteenth aspect, the locking device is configured to physically regulate the rotation of the crank of the human-powered vehicle in the restricted state.
According to the system for the human-powered vehicle on the fifteenth side, the locking device physically regulates the rotation of the crank of the human-powered vehicle, so that the traveling of the human-powered vehicle can be physically regulated.
前記第1〜第15側面のいずれか1つに従う第16側面の人力駆動車用システムにおいて、前記第2電気コンポーネントを前記第2状態から前記第1状態に切り替えるための第1操作部をさらに含む。
第16側面の人力駆動車用システムによれば、第1操作部によって第2電気コンポーネントを第2状態から第1状態に好適に切り替えることができる。
In the human-powered vehicle system on the 16th side according to any one of the 1st to 15th sides, a first operation unit for switching the second electric component from the second state to the first state is further included. ..
According to the human-powered vehicle system on the 16th side, the first operating unit can suitably switch the second electrical component from the second state to the first state.
前記第1〜第16側面のいずれか1つに従う第17側面の人力駆動車用システムにおいて、前記第1通信部は、前記外部装置と無線で通信可能に構成される。
第17側面の人力駆動車用システムによれば、外部装置と第1電気コンポーネントの第
1通信部とが無線で通信できる。
In the human-powered vehicle system on the 17th side according to any one of the 1st to 16th sides, the first communication unit is configured to be able to wirelessly communicate with the external device.
According to the human-powered vehicle system on the 17th side, the external device and the first communication unit of the first electric component can communicate wirelessly.
前記第1〜第17側面のいずれか1つに従う第18側面の人力駆動車用システムにおいて、前記第1通信部と前記第2通信部とは、有線で接続される。
第18側面の人力駆動車用システムによれば、第1電気コンポーネントの第1通信部と第2電気コンポーネントの第2通信部とを有線で通信できる。
In the human-powered vehicle system on the 18th side according to any one of the 1st to 17th side surfaces, the first communication unit and the second communication unit are connected by wire.
According to the human-powered vehicle system on the eighteenth side, the first communication unit of the first electric component and the second communication unit of the second electric component can be communicated by wire.
前記第1〜第18側面のいずれか1つに従う第19側面の人力駆動車用システムにおいて、前記第1情報、前記第2情報、および、前記第3情報は、同じ情報を含む。
第19側面の人力駆動車用システムによれば、第1情報、第2情報、および、第3情報の対応付けが簡単になる。
In the human-powered vehicle system on the 19th side according to any one of the 1st to 18th sides, the first information, the second information, and the third information include the same information.
According to the human-powered vehicle system on the 19th side, the association of the first information, the second information, and the third information becomes easy.
前記第1〜第19側面のいずれか1つに従う第20側面の人力駆動車用システムにおいて、前記第1電気コンポーネントは、前記第2電気コンポーネントの動作状態を変更するための第2操作部、および、表示部の少なくとも一方をさらに含む。
第20側面の人力駆動車用システムによれば、第1通信部および第1記憶部と、第2操作部および表示部の少なくとも一方とを同一の第1電気コンポーネントに設けることができる。
In the human-powered vehicle system on the 20th side according to any one of the 1st to 19th sides, the first electric component is a second operation unit for changing the operating state of the second electric component, and , At least one of the display units is further included.
According to the human-powered vehicle system of the 20th aspect, the first communication unit and the first storage unit, and at least one of the second operation unit and the display unit can be provided in the same first electric component.
前記第1〜第20側面のいずれか1つに従う第21側面の人力駆動車用システムにおいて、前記第2電気コンポーネントは、前記人力駆動車の推進をアシストするドライブユニット、電動変速機、電動サスペンション、および、電動シートポストの少なくともいずれか1つを含む。
第21側面の人力駆動車用システムによれば、ドライブユニット、電動変速機、電動サスペンション、および、電動シートポストの少なくともいずれか1つの状態を第1状態と第2状態とに切り替えることができる。
In the human-powered vehicle system of the 21st side according to any one of the 1st to 20th sides, the second electric component is a drive unit, an electric transmission, an electric suspension, and an electric suspension that assists the propulsion of the human-powered vehicle. , Includes at least one of the electric seatposts.
According to the human-powered vehicle system on the 21st side, at least one state of the drive unit, the electric transmission, the electric suspension, and the electric seat post can be switched between the first state and the second state.
前記第21側面に従う第22側面の人力駆動車用システムにおいて、前記第2電気コンポーネントは、電動アクチュエータと、前記電動アクチュエータを制御する制御部とを含み、前記第1状態において、前記制御部は、前記電動アクチュエータを停止させる。
第22側面の人力駆動車用システムによれば、第1状態において、第2電気コンポーネントの電動アクチュエータを停止できる。
In the human-powered vehicle system on the 22nd side according to the 21st side surface, the second electric component includes an electric actuator and a control unit for controlling the electric actuator, and in the first state, the control unit is a control unit. The electric actuator is stopped.
According to the human-powered vehicle system on the 22nd side surface, the electric actuator of the second electric component can be stopped in the first state.
本発明の第23側面に従う人力駆動車用システムの制御方法は、第1情報を記憶する第1記憶部、および、外部装置と通信可能な第1通信部を備える人力駆動車用の第1電気コンポーネントと、第2情報を記憶する第2記憶部、および、前記第1通信部と通信可能な第2通信部を備え、第1状態と前記第1状態とは異なる第2状態とを切り替えて動作するように構成される前記人力駆動車用の第2電気コンポーネントと、を含む人力駆動車用システムの制御方法であって、前記外部装置と前記第1通信部とが通信可能に接続される場合において、前記第1情報と前記外部装置に入力または記憶される第3情報とが対応し、かつ、前記第1情報と前記第2情報とが対応する場合、前記第1情報と前記第3情報とが対応し、かつ、前記第2情報と前記第3情報とが対応する場合、または、前記第2情報と前記第3情報とが対応し、かつ、前記第1情報と前記第2情報とが対応する場合、前記第2電気コンポーネントを、前記第1状態から前記第2状態に切り替える。
第23側面の人力駆動車用システムの制御方法によれば、外部装置を用いて第2電気コンポーネントの状態を変更することができる。
The control method of the human-powered vehicle system according to the 23rd aspect of the present invention is the first electric power for a human-powered vehicle including a first storage unit for storing the first information and a first communication unit capable of communicating with an external device. It includes a component, a second storage unit that stores second information, and a second communication unit that can communicate with the first communication unit, and switches between a first state and a second state different from the first state. A control method for a human-powered vehicle system that includes a second electrical component for the human-powered vehicle that is configured to operate, wherein the external device and the first communication unit are communicably connected. In the case, when the first information corresponds to the third information input or stored in the external device, and the first information corresponds to the second information, the first information and the third information correspond to each other. When the information corresponds and the second information corresponds to the third information, or when the second information and the third information correspond to each other and the first information and the second information correspond to each other. When the above corresponds, the second electric component is switched from the first state to the second state.
According to the control method of the human-powered vehicle system on the 23rd side surface, the state of the second electric component can be changed by using an external device.
本発明の人力駆動車用システムおよび人力駆動車用システムの制御方法は、外部装置を用いて電気コンポーネントの状態を変更することができる。 The control method of the human-powered vehicle system and the human-powered vehicle system of the present invention can change the state of the electric component by using an external device.
(第1実施形態)
図1〜図9を参照して、第1実施形態の人力駆動車用システム40について説明する。人力駆動車用システム40は、人力駆動車10に設けられる。人力駆動車10は、少なくとも人力駆動力によって駆動することができる車である。人力駆動車10は、例えば、自転車を含む。人力駆動車10は、車輪の数が限定されず、例えば1輪車および3輪以上の車輪を有する車も含む。人力駆動車は、例えばマウンテンバイク、ロードバイク、シティバイク、カーゴバイク、および、リカンベントなど種々の種類の自転車、ならびに、電動アシスト自転車(E−bike)を含む。以下、実施の形態において、人力駆動車10を、自転車として説明する。
(First Embodiment)
The human-powered
図1に示されるとおり人力駆動車10は、クランク12および駆動輪14を備える。人力駆動車10は、フレーム16をさらに備える。クランク12には、人力駆動力Hが入力される。クランク12は、フレーム16に対して回転可能なクランク軸12Aと、クランク軸12Aの軸方向の端部にそれぞれ設けられるクランクアーム12Bとを含む。各クランクアーム12Bには、ペダル18が連結される。駆動輪14は、クランク12が回転することによって駆動される。駆動輪14は、フレーム16に支持される。クランク12と駆動輪14とは、駆動機構20によって連結される。駆動機構20は、クランク軸12Aに結合される第1回転体22を含む。クランク軸12Aと第1回転体22とは、第1ワン
ウェイクラッチを介して結合されていてもよい。第1ワンウェイクラッチは、クランク12が前転した場合に、第1回転体22を前転させ、クランク12が後転した場合に、第1回転体22を後転させないように構成される。第1回転体22は、スプロケット、プーリ、または、ベベルギアを含む。駆動機構20は、第2回転体24と、連結部材26とをさらに含む。連結部材26は、第1回転体22の回転力を第2回転体24に伝達する。連結部材26は、例えば、チェーン、ベルト、または、シャフトを含む。
As shown in FIG. 1, the human-powered
第2回転体24は、駆動輪14に連結される。第2回転体24は、スプロケット、プーリ、または、ベベルギアを含む。第2回転体24と駆動輪14との間には、第2ワンウェイクラッチが設けられていることが好ましい。第2ワンウェイクラッチは、第2回転体24が前転した場合に、駆動輪14を前転させ、第2回転体24が後転した場合に、駆動輪14を後転させないように構成される。
The second
人力駆動車10は、前輪および後輪を含む。フレーム16には、フロントフォーク16Aを介して前輪が取り付けられている。フロントフォーク16Aには、ハンドルバー16Cがステム16Bを介して連結されている。以下の実施形態では、後輪を駆動輪14として説明するが、前輪が駆動輪14であってもよい。
The human-powered
人力駆動車10は、バッテリ28をさらに含む。バッテリ28は、1または複数のバッテリセルを含む。バッテリセルは、充電池を含む。バッテリ28は、人力駆動車10に設けられ、バッテリ28と有線で電気的に接続されている他の電気部品、例えば、人力駆動車用システム40の第1電気コンポーネント42および第2電気コンポーネント44に電力を供給する。バッテリ28は、第1電気コンポーネント42および第2電気コンポーネント44と有線または無線によって通信可能に接続されている。バッテリ28は、例えば電力線通信(PLC;power line communication)によって第1電気コンポーネント42および第2電気コンポーネント44と通信可能である。バッテリ28は、フレーム16の外部に取り付けられてもよく、少なくとも一部がフレーム16の内部に収容されてもよい。
The human-powered
図2に示されるとおり、人力駆動車用システム40は、人力駆動車用の第1電気コンポーネント42と、人力駆動車用の第2電気コンポーネント44と、を含む。第1電気コンポーネント42は、第1情報を記憶する第1記憶部46、および、外部装置Cと通信可能な第1通信部48を備える。第2電気コンポーネント44は、第2情報を記憶する第2記憶部50、および、第1通信部48と通信可能な第2通信部52を備え、第1状態と、第1状態とは異なる第2状態とを切り替えて動作するように構成される。
As shown in FIG. 2, the human-powered
第1記憶部46には、各種の制御プログラムおよび各種の制御処理に用いられる情報が記憶される。第1記憶部46は、例えば不揮発性メモリを含む。第1記憶部46は、揮発性メモリをさらに含んでもよい。
The
第2記憶部50には、各種の制御プログラムおよび各種の制御処理に用いられる情報が記憶される。第2記憶部50は、例えば不揮発性メモリを含む。第2記憶部50は、揮発性メモリをさらに含んでもよい。
The
外部装置Cは、記憶部C1、通信部C2、制御部C3、および、操作部C4を含む。制御部C3は、予め定められる制御プログラムを実行する演算処理装置を含む。演算処理装置は、例えばCPU(Central Processing Unit)またはMPU(Micro Processing Unit)を含む。制御部C3は、1または複数のマイクロコンピュータを含んでいてもよい。記憶部C1には、各種の制御プログラムおよび各種の制御処理に用いられる情報が記憶される。記憶部C1は、例えば不揮発性メモリおよび揮発性メモリを含む。操作部C4は、ユ
ーザが操作可能に構成される。通信部C2は、無線通信可能に構成される。外部装置Cは、例えば、パーソナルコンピュータ、スマートフォン、および、タブレット型コンピュータの少なくとも1つを含む。外部装置Cの記憶部C1には、人力駆動車用システム40と情報を送受信するためのアプリケーションソフトウェアが記憶されていることが好ましい。人力駆動車用システム40は外部装置Cを含んでいてもよい。
The external device C includes a storage unit C1, a communication unit C2, a control unit C3, and an operation unit C4. The control unit C3 includes an arithmetic processing unit that executes a predetermined control program. The arithmetic processing unit includes, for example, a CPU (Central Processing Unit) or an MPU (Micro Processing Unit). The control unit C3 may include one or more microcomputers. The storage unit C1 stores various control programs and information used for various control processes. The storage unit C1 includes, for example, a non-volatile memory and a volatile memory. The operation unit C4 is configured to be operable by the user. The communication unit C2 is configured to enable wireless communication. The external device C includes, for example, at least one of a personal computer, a smartphone, and a tablet computer. It is preferable that the storage unit C1 of the external device C stores application software for transmitting and receiving information to and from the human-powered
外部装置Cと第1通信部48とが通信可能に接続される場合において、第1情報と外部装置Cに入力または記憶される第3情報とが対応し、かつ、第1情報と第2情報とが対応する場合、第1情報と第3情報とが対応し、かつ、第2情報と第3情報とが対応する場合、または、第2情報と第3情報とが対応し、かつ、第1情報と第2情報とが対応する場合、第2電気コンポーネント44は、第1状態から第2状態に切り替わる。
When the external device C and the
人力駆動車用システム40の制御方法は、外部装置Cと第1通信部48とが通信可能に接続される場合において、第1情報と外部装置Cに入力または記憶される第3情報とが対応し、かつ、第1情報と第2情報とが対応する場合、第1情報と第3情報とが対応し、かつ、第2情報と第3情報とが対応する場合、または、第2情報と第3情報とが対応し、かつ、第1情報と第2情報とが対応する場合、第2電気コンポーネント44を、第1状態から第2状態に切り替える。
In the control method of the human-powered
例えば、人力駆動車用システム40および外部装置Cの少なくとも一方は、第1情報と第2情報とが整合する場合、第1情報と第2情報とが対応すると判定する。人力駆動車用システム40および外部装置Cの少なくとも一方は、第1情報と第3情報とが整合する場合、第1情報と第3情報とが対応すると判定する。人力駆動車用システム40および外部装置Cの少なくとも一方は、第2情報と第3情報とが整合する場合、第2情報と第3情報とが対応すると判定する。一例では、第1情報、第2情報、および、第3情報は、同じ情報を含む。この場合、第1情報、第2情報、および、第3情報は、全て一致する。第1情報、第2情報、および、第3情報は、例えば、アルファベットおよび数字の組み合わせを含む。第1情報、第2情報、および、第3情報は、いわゆるパスワード情報である。
For example, at least one of the human-powered
第1状態では、第2電気コンポーネント44の少なくとも1つの機能が制限される。第2状態では、第2電気コンポーネント44の少なくとも1つの機能が制限されない。第2電気コンポーネント44は、第2制御部56を含む。第2制御部56は、予め定められる制御プログラムを実行する演算処理装置を含む。演算処理装置は、例えばCPUまたはMPUを含む。第2制御部56は、1または複数のマイクロコンピュータを含んでいてもよい。第2制御部56は、予め定められる制御プログラムを記憶する記憶部を含んでいる。記憶部は、第2記憶部50と同様の構成を有する。第2記憶部50を記憶部として用いることができるが、記憶部は、第2記憶部50と各別に構成されてもよい。
In the first state, at least one function of the second
第2電気コンポーネント44は、電動アクチュエータ54と、電動アクチュエータ54を制御する制御部56Aを含む。第2状態において、制御部56Aは、電動アクチュエータ54を停止させる。制御部56Aは、第2制御部56に含まれる。
The second
第2状態において制限される機能は、電動アクチュエータ54の動作によって実現される機能を含む。第2電気コンポーネント44は、図1に示す人力駆動車10の推進をアシストするドライブユニット44A、電動変速機44B、電動サスペンション44C、および、電動シートポスト44Dの少なくともいずれか1つを含む。
The functions restricted in the second state include the functions realized by the operation of the
ドライブユニット44Aは、電動アクチュエータ54Aおよび駆動回路を含む。電動アクチュエータ54Aおよび駆動回路は、同一のハウジングに設けられることが好ましい。駆動回路は、バッテリ28から電動アクチュエータ54Aに供給される電力を制御する。
駆動回路は、第2制御部56と有線または無線によって通信可能に接続されている。駆動回路は、例えばシリアル通信によって第2制御部56と通信可能である。駆動回路は、第2制御部56からの制御信号に応じて電動アクチュエータ54Aを駆動させる。電動アクチュエータ54Aは、人力駆動車10の推進をアシストする。電動アクチュエータ54Aは、電気モータを含む。電動アクチュエータ54Aは、ペダル18から後輪までの人力駆動力Hの動力伝達経路、または、前輪に回転を伝達するように設けられる。電気モータは、人力駆動車10のフレーム16、後輪、または、前輪に設けられる。一例では、電気モータは、クランク軸12Aから第1回転体22までの動力伝達経路に結合される。電気モータとクランク軸12Aとの間の動力伝達経路には、クランク軸12Aを人力駆動車10が前進する方向に回転させた場合にクランク12の回転力によって電気モータが回転しないようにワンウェイクラッチが設けられるのが好ましい。電気モータおよび駆動回路が設けられるハウジングには、電気モータおよび駆動回路以外の構成が設けられてもよく、例えば電気モータの回転を減速して出力する減速機が設けられてもよい。
The
The drive circuit is communicably connected to the
第2電気コンポーネント44がドライブユニット44Aを含む場合、第1状態では、例えば、電動アクチュエータ54Aによる人力駆動車10の推進をアシストする機能が制限される。第2制御部56は、第1状態では、電動アクチュエータ54Aを停止させる。
When the second
電動変速機44Bは、変速機および電動アクチュエータ54Bを含む。変速機は、クランク12の回転速度Nに対する駆動輪14の回転速度の変速比を変更するために用いられる。変速機は、変速比を段階的または無段階に変更可能に構成される。電動アクチュエータ54Bは、変速機に変速動作を実行させる。電動アクチュエータ54Bは、電気モータを含む。変速機は、第2制御部56によって制御される。電動アクチュエータ54Bは、第2制御部56と有線または無線によって通信可能に接続されている。電動アクチュエータ54Bは、例えば電力線通信によって第2制御部56と通信可能である。電動アクチュエータ54Bは、第2制御部56からの制御信号に応じて変速機に変速動作を実行させる。変速機は、内装変速機およびディレイラの少なくとも一方を含む。
The
第2電気コンポーネント44が電動変速機44Bを含む場合、第1状態では、例えば、電動変速機44Bによる変速比を変更する機能が制限される。第2制御部56は、第1状態では、電動変速機44Bの電動アクチュエータ54Bを停止させる。
When the second
電動サスペンション44Cは、サスペンションの硬さ、減衰率、高さの少なくとも1つを変更するための電動アクチュエータ54Cを含む。電動アクチュエータ54Cは、電気モータおよびソレノイドの少なくとも一方を含む。サスペンションは、フロントサスペンションおよびリアサスペンションの少なくとも1つを含む。
The
第2電気コンポーネント44が電動サスペンション44Cを含む場合、第1状態では、例えば、サスペンションがロックされ、緩衝の機能が制限される。また、例えば、第1状態では、サスペンションの硬さ、減衰率、および、長さの少なくとも1つを変更する機能が制限される。第2制御部56は、第1状態では、電動サスペンション44Cの電動アクチュエータ54Cを停止させる。
When the second
電動シートポスト44Dは、シートポストの高さを変更するための電動アクチュエータ54Dを含む。電動アクチュエータ54Dは、油圧または空気を用いて伸長する電動シートポスト44Dのバルブをコントロールしてもよい。電動アクチュエータ54Dは、電気モータおよびソレノイドの少なくとも一方を含む。
The electric seatpost 44D includes an
第2電気コンポーネント44が電動シートポスト44Dを含む場合、第1状態では、例えば、シートポストの高さを変更する機能が制限される。第2制御部56は、第1状態で
は、電動シートポスト44Dの電動アクチュエータ54Dを停止させる。
When the second
図2に示す人力駆動車用システム40は、好ましくは、第2電気コンポーネント44を第2状態から第1状態に切り替えるための第1操作部58をさらに含む。一例では、第1操作部58は、第1電気コンポーネント42に含まれる。第1操作部58は、人力駆動車用システム40の電源ボタンを含んでいてもよい。人力駆動車用システム40は、オンモードとオフモードとを切り替え可能に構成されることが好ましい。オフモードでは、オンモードの場合よりもバッテリ28から人力駆動車用システム40に供給される電力が少ない。人力駆動車用システム40がオンモードの場合に第1操作部58が操作されると、人力駆動車用システム40はオフモードに切り替わる。オンモードからオフモードに切り替えられる場合、第2電気コンポーネント44は、第2状態から第1状態に切り替えられる。第1電気コンポーネント42は、好ましくは、第2電気コンポーネント44の動作状態を変更するための第2操作部60、および、表示部62の少なくとも一方をさらに含む。第1電気コンポーネント42は、例えば、サイクルコンピュータを含む。第2制御部56は、第2操作部60の操作に応じて第2電気コンポーネント44の動作状態を変更する。例えば、第2電気コンポーネント44がドライブユニット44Aである場合、第2電気コンポーネント44の動作状態は、人力駆動力Hに対するモータの出力の大きさが異なる複数の動作モードを含む。第2電気コンポーネント44が電動変速機44Bである場合、第2電気コンポーネント44の動作状態は、変速比を含む。第2電気コンポーネント44が電動サスペンション44Cである場合、第2電気コンポーネント44の動作状態はサスペンションのロック状態と解除状態とを含む。第2電気コンポーネント44が電動シートポスト44Dである場合、第2電気コンポーネント44の動作状態は、シートポストの高さ含む。表示部62は、例えば、第2電気コンポーネント44が第1状態および第2状態のいずれであるかを表示する。表示部62は、第2電気コンポーネント44の動作状態を表示するようにしてもよい。
The human-powered
好ましくは、第1通信部48と第2通信部52とは、有線で接続される。第1通信部48と第2通信部52は、例えば、電力線通信(PLC)によって通信可能である。第1通信部48と第2通信部52とは、無線によって接続されてもよい。好ましくは、第1通信部48は、外部装置Cと無線で通信可能に構成される。第1通信部48と外部装置Cとが行う無線通信の規格の一例は、ANT+(登録商標)またはBluetooth(登録商標)である。本実施形態では、第1通信部48は、外部装置Cの通信部C2と無線通信するための無線通信部と、第2通信部52と有線通信するための有線通信部とを含む。第1通信部48は、外部装置Cと有線で通信可能に構成されていてもよい。
Preferably, the
第1電気コンポーネント42は、第1制御部64を含む。第1制御部64は、予め定められる制御プログラムを実行する演算処理装置を含む。演算処理装置は、例えばCPUまたはMPUを含む。第1制御部64は、1または複数のマイクロコンピュータを含んでいてもよい。第1制御部64は、予め定められる制御プログラムを記憶する記憶部を含んでいる。記憶部は、第1記憶部46と同様の構成を有する。第1記憶部46を記憶部として用いることができるが、記憶部は、第1記憶部46と各別に構成されてもよい。
The first
好ましくは、第1電気コンポーネント42および第2電気コンポーネント44の少なくとも一方は、第1通信部48が外部装置Cから受信した第3情報が第1情報または第2情報に対応しているか否かを判定する第1判定部66をさらに含む。一例では、第1判定部66は、第1電気コンポーネント42に含まれる。この場合、第1判定部66は、第1制御部64に含まれることが好ましい。
Preferably, at least one of the first
好ましくは、第1電気コンポーネント42および第2電気コンポーネント44の少なくとも一方は、第2情報が第1情報に対応しているか否かを判定する第2判定部68をさら
に含む。一例では、第2判定部68は、第2電気コンポーネント44に含まれる。この場合、第2判定部68は、第2制御部56に含まれることが好ましい。第1通信部48は、第1情報を第2通信部52に送信するように構成される。
Preferably, at least one of the first
図3を参照して、外部装置Cが第1通信部48と通信可能な場合に、第3情報を第1電気コンポーネント42に送信する処理について説明する。制御部C3は、制御部C3にバッテリ28または外部装置Cに含まれるバッテリから電力が供給されると、処理を開始して図3に示すフローチャートのステップS11に移行する。制御部C3は、電力が供給されている限り、所定周期ごとにステップS11からの処理を実行する。制御部C3は、人力駆動車用システム40を制御するためのアプリケーションソフトウェアが起動すると、処理を開始してステップS11に移行するようにしてもよい。この場合、制御部C3は、人力駆動車用システム40を制御するためのアプリケーションソフトウェアが起動している限り、所定周期ごとにステップS11からの処理を実行する。
A process of transmitting the third information to the first
制御部C3は、ステップS11において、第1通信部48と通信可能に接続されているか否かを判定する。制御部C3は、例えば、外部装置Cが人力駆動車用システム40を制御するためのアプリケーションソフトウェアを起動している場合、第1通信部48からの信号を受信するように構成され、第1通信部48からの信号を受信した場合、第1通信部48と通信可能に接続されていると判定する。制御部C3は、第1通信部48と通信可能ではない場合、処理を終了する。制御部C3は、第1通信部48と通信可能な場合、ステップS12に移行する。制御部C3は、ステップS12において、記憶部C1に予め記憶されている第3情報を第1電気コンポーネント42に送信し、処理を終了する。
In step S11, the control unit C3 determines whether or not it is communicably connected to the
制御部C3は、例えば、外部装置Cが人力駆動車用システム40を制御するためのアプリケーションソフトウェアを起動している場合において、操作部C4に第3情報が入力された場合、第3情報を第1電気コンポーネント42に送信するようにしてもよい。この場合、記憶部C1には、第3情報が記憶されていなくてもよい。
For example, when the external device C is activating the application software for controlling the human-powered
図4を参照して、外部装置Cの操作部C4を用いて第3情報が入力された場合に、第3情報を第1電気コンポーネント42に送信する処理について説明する。制御部C3は、制御部C3にバッテリ28または外部装置Cに含まれるバッテリから電力が供給されると、処理を開始して図4に示すフローチャートのステップS21に移行する。制御部C3は、電力が供給されている限り、所定周期ごとにステップS21からの処理を実行する。制御部C3は、人力駆動車用システム40を制御するためのアプリケーションソフトウェアが起動すると、処理を開始してステップS21に移行するようにしてもよい。この場合、制御部C3は、人力駆動車用システム40を制御するためのアプリケーションソフトウェアが起動している限り、所定周期ごとにステップS21からの処理を実行する。
With reference to FIG. 4, a process of transmitting the third information to the first
制御部C3は、ステップS21において、第3情報が入力されたか否かを判定する。制御部C3は、例えば、操作部C4に第3情報が入力された場合、第3情報が入力されたと判定する。例えば、ユーザは、外部装置Cが人力駆動車用システム40を制御するためのアプリケーションソフトウェアを起動させた状態で、操作部C4によって第3情報を入力する。制御部C3は、第3情報が入力されていない場合、処理を終了する。制御部C3は、第3情報が入力された場合、ステップS22に移行する。制御部C3は、ステップS22において、ステップS21において入力された第3情報を第1電気コンポーネント42に送信し、処理を終了する。
The control unit C3 determines in step S21 whether or not the third information has been input. For example, when the third information is input to the operation unit C4, the control unit C3 determines that the third information has been input. For example, the user inputs the third information by the operation unit C4 in a state where the external device C activates the application software for controlling the human-powered
図5を参照して、外部装置Cから第3情報が第1電気コンポーネント42に送信された場合の第1電気コンポーネント42の第1制御部64の処理について説明する。第1制御部64は、第1制御部64にバッテリ28から電力が供給されると、処理を開始して図5
に示すフローチャートのステップS31に移行する。第1制御部64は、電力が供給されている限り、所定周期ごとにステップS31からの処理を実行する。
With reference to FIG. 5, the processing of the
The process proceeds to step S31 of the flowchart shown in 1. The
第1制御部64は、ステップS31において、第3情報が入力されたか否かを判定する。第1制御部64は、例えば、第1通信部48が外部装置Cの通信部C2から送信された第3情報を受信した場合、第3情報が入力されたと判定する。第1制御部64は、第3情報が入力されていない場合、処理を終了する。第1制御部64は、第3情報が入力された場合、ステップS32の処理に移行する。
The
第1制御部64は、ステップS32において、第3情報が第1記憶部46に記憶されている第1情報と対応しているか否かを判定する。第1制御部64は、第3情報が第1情報と対応していない場合、処理を終了する。第1制御部64は、第3情報が第1情報と対応している場合、ステップS33に移行する。第1制御部64は、ステップS33において、第1記憶部46に記憶されている第1情報を第2電気コンポーネント44に送信して処理を終了する。
In step S32, the
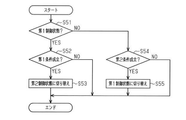
図6を参照して、第1電気コンポーネント42から第1情報が第2電気コンポーネント44に送信された場合の第2電気コンポーネント44の処理について説明する。第2制御部56は、第2制御部56にバッテリ28から電力が供給されると、処理を開始して図6に示すフローチャートのステップS41に移行する。第2制御部56は、電力が供給されている限り、所定周期ごとにステップS41からの処理を実行する。
With reference to FIG. 6, the processing of the second
第2制御部56は、ステップS41において、第1情報が入力されたか否かを判定する。第2制御部56は、例えば、第2通信部52が第1通信部48から送信された第1情報を受信した場合、第1情報が入力されたと判定する。第2制御部56は、第1情報が入力されていない場合、処理を終了する。第2制御部56は、第1情報が入力された場合、ステップS42の処理に移行する。
The
第2制御部56は、ステップS42において、第1情報が第2記憶部50に記憶されている第2情報と対応しているか否かを判定する。第2制御部56は、第1情報が第2情報と対応していない場合、処理を終了する。第2制御部56は、第2情報が第1情報と対応している場合、ステップS43に移行する。
In step S42, the
第2制御部56は、ステップS43において、第2電気コンポーネント44を第1状態から第2状態に切り替え、ステップS44に移行する。第2制御部56は、ステップS44において、第1操作部58が操作されたか否かを判定する。第2制御部56は、第1操作部58が操作されるまで、ステップS44の処理を繰り返す。第2制御部56は、第1操作部58が操作された場合、ステップS45に移行し、第2状態から第1状態に切り替え、処理を終了する。
In step S43, the
好ましくは、第2電気コンポーネント44は、第1情報、第2情報、および、第3情報に応じて、第1状態と第2状態とを切り替える第1制御状態と、第1情報、第2情報、および、第3情報に応じて、第1状態と第2状態とを切り替えない第2制御状態と、を切り替えて動作するように構成される。第1制御状態と第2制御状態との切り替えは、第2制御部56が決定してもよく、第1制御部64または外部装置Cの制御部C3が決定してもよい。第1制御部64または外部装置Cの制御部C3が第1制御状態と第2制御状態との切り替えを決定する場合、第1制御状態と第2制御状態との切り替えを行わせるための信号を第2制御部56に送信し、第2制御部56が第1制御状態と第2制御状態とを切り替えることが好ましい。
Preferably, the second
第2電気コンポーネント44は、第1制御状態において第1条件が成立した場合、第1制御状態から第2制御状態に切り替えて動作する。第1条件は、例えば、第1情報と対応しない第3情報が外部装置Cに入力された回数が第1回数以上になった場合に成立する。また、第1条件は、例えば、ユーザが外部装置Cに第1情報と対応する第3情報を入力し、かつ、第1制御状態から第2制御状態へ切り替える操作を行った場合に成立する。
When the first condition is satisfied in the first control state, the second
第2電気コンポーネント44は、第2制御状態において第2条件が成立した場合、第2制御状態から第1制御状態に切り替えて動作する。第2条件は、例えば、ユーザが外部装置Cに第1情報と対応する第3情報を入力し、かつ、第2制御状態から第1制御状態へ切り替える操作を行った場合に成立する。また、例えば、第2条件は、第2制御状態から第1制御状態への切り替えの権限を有する管理者によって第2制御状態から第1制御状態の切り替えの操作を行った場合に成立する。第2制御状態から第1制御状態への切り替えの権限は、例えば第2電気コンポーネント44の出荷時に設定される。
When the second condition is satisfied in the second control state, the second
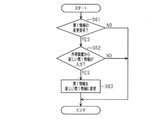
図7を参照して、第2制御部56が第1制御状態と第2制御状態とを切り替える処理について説明する。第2制御部56は、第2制御部56にバッテリ28から電力が供給されると、処理を開始して図7に示すフローチャートのステップS51に移行する。第2制御部56は、電力が供給されている限り、所定周期ごとにステップS51からの処理を実行する。
A process in which the
第2制御部56は、ステップS51において第1制御状態か否かを判定する。第2制御部56は、第1制御状態の場合、ステップS52に移行する。第2制御部56は、ステップS52において、第1条件が成立したか否かを判定する。第2制御部56は、第1条件が成立していない場合、処理を終了する。第2制御部56は、第1条件が成立した場合、ステップS53に移行する。第2制御部56は、ステップS53において、第2制御状態に切り替えて処理を終了する。
The
第2制御部56は、ステップS51において第1制御状態ではないと判定した場合、ステップS54に移行する。第2制御部56は、ステップS54において、第2条件が成立したか否かを判定する。第2制御部56は、第2条件が成立していない場合、処理を終了する。第2制御部56は、第2条件が成立した場合、ステップS55に移行する。第2制御部56は、ステップS55において、第1制御状態に切り替えて処理を終了する。
When the
好ましくは、第1記憶部46は、第1情報を変更可能に記憶する。好ましくは、第2記憶部50は、第2情報を変更可能に記憶する。好ましくは、第1情報は、第1手順で変更され、第2情報は、第1手順とは異なる第2手順で変更される。
Preferably, the
好ましくは、第2電気コンポーネント44は、第2記憶部50を制御する記憶制御部70(図2参照)を含む。好ましくは、第2手順は、外部装置Cから第2電気コンポーネント44への第2情報の入力を含む。好ましくは、記憶制御部70は、外部装置Cから第2情報が入力された場合、第2情報を変更するように第2記憶部50を制御する。
Preferably, the second
図8を参照して、第1記憶部46に記憶される第1情報を変更する処理について説明する。第1制御部64は、第1制御部64にバッテリ28から電力が供給されると、処理を開始して図8に示すフローチャートのステップS61に移行する。第1制御部64は、電力が供給されている限り、所定周期ごとにステップS61からの処理を実行する。
A process of changing the first information stored in the
第1制御部64は、ステップS61において、第1情報の変更要求があるか否かを判定する。第1制御部64は、例えば、第1通信部48が外部装置Cと通信可能な状態において、外部装置Cから第1情報の変更要求が入力された場合、第1情報の変更要求があると
判定する。例えば、ユーザが外部装置Cのアプリケーションソフトウェア上で第1情報を変更するためのモードを選択した場合、第1情報の変更要求が設定され、第1電気コンポーネント42に第1情報の変更要求が送信される。第1制御部64は、第1情報の変更要求がない場合は処理を終了する。第1制御部64は、第1情報の変更要求がある場合、ステップS62に移行する。
In step S61, the
第1制御部64は、ステップS62において外部装置Cから新しい第1情報が入力されたか否かを判定する。第1制御部64は、ステップS61における肯定判定から所定期間が経過しても外部装置Cから新しい第1情報が入力されない場合、第1情報が入力されていないと判定する。第1制御部64は、外部装置Cから新しい第1情報が入力されない場合、処理を終了する。第1制御部64は、外部装置Cから新しい第1情報が入力された場合、ステップS63に移行する。第1制御部64は、ステップS63において、第1情報を新しい第1情報に変更して処理を終了する。具体的には、第1制御部64は、第1記憶部46に記憶されている第1情報を新しい第1情報に更新する。
The
図9を参照して、第2記憶部50に記憶される第2情報を変更する処理について説明する。記憶制御部70は、第2制御部56にバッテリ28から電力が供給されると、処理を開始して図9に示すフローチャートのステップS71に移行する。記憶制御部70は、電力が供給されている限り、所定周期ごとにステップS71からの処理を実行する。
A process of changing the second information stored in the
記憶制御部70は、ステップS71において、第2情報の変更要求があるか否かを判定する。記憶制御部70は、例えば、第2通信部52が第1通信部48を介して外部装置Cと通信可能な状態において、外部装置Cから第2情報の変更要求が入力された場合、第2情報の変更要求があると判定する。第2電気コンポーネント44は外部装置Cと直接的に通信可能に構成されてもよい。例えば、第2電気コンポーネント44に外部装置Cと第2制御部56とを有線接続するためのコネクタが設けられる。または、第2電気コンポーネント44と第1電気コンポーネント42とを接続する電力通信線に外部装置Cを接続するためのコネクタが設けられる。この場合、記憶制御部70は、第2情報の変更要求が、第1電気コンポーネント42を介さずに外部装置Cから第2電気コンポーネント44に入力された場合、第2情報の変更要求があると判定する。例えば、ユーザが外部装置Cのアプリケーションソフトウェア上で第2情報を変更するためのモードを選択した場合、第2情報の変更要求が設定され、第2電気コンポーネント44に第2情報の変更要求が送信される。記憶制御部70は、第2情報の変更要求がない場合は処理を終了する。記憶制御部70は、第2情報の変更要求がある場合、ステップS72に移行する。
In step S71, the
記憶制御部70は、ステップS72において、外部装置Cに入力された情報が第2情報と対応するか否かを判定する。具体的には、記憶制御部70は、第2記憶部50に記憶されている第2情報と対応する情報が外部装置Cから第1電気コンポーネント42を介して第2電気コンポーネント44に入力された場合、外部装置Cに入力された情報が、第2情報と対応すると判定する。第2電気コンポーネント44が外部装置Cと直接的に通信可能に構成されている場合、記憶制御部70は、第2記憶部50に記憶されている第2情報と対応する情報が、第1電気コンポーネント42を介さずに外部装置Cから第2電気コンポーネント44に入力された場合、外部装置Cに入力された情報が第2情報と対応すると判定する。記憶制御部70は、外部装置Cに入力された情報が第2情報と対応しない場合、処理を終了する。記憶制御部70は、外部装置Cに入力された情報が第2情報と対応する場合、ステップS73に移行する。
In step S72, the
記憶制御部70は、ステップS73において、外部装置Cから新しい第2情報が入力されたか否かを判定する。具体的には、記憶制御部70は、新しい第2情報が外部装置Cから第1電気コンポーネント42を介して第2電気コンポーネント44に入力された場合、
外部装置Cから新しい第2情報が入力されたと判定する。第2電気コンポーネント44が外部装置Cと直接的に通信可能に構成されている場合、記憶制御部70は、新しい第2情報が第1電気コンポーネント42を介さずに外部装置Cから第2電気コンポーネント44に入力された場合、外部装置Cから新しい第2情報が入力されたと判定する。記憶制御部70は、ステップS72における肯定判定から所定期間が経過しても外部装置Cから新しい第2情報が入力されない場合、第2情報が入力されていないと判定する。記憶制御部70は、外部装置Cから新しい第2情報が入力されない場合、処理を終了する。記憶制御部70は、外部装置Cから新しい第2情報が入力された場合、ステップS74に移行する。記憶制御部70は、ステップS74において、第2情報を新しい第2情報に変更して処理を終了する。具体的には、記憶制御部70は、第2記憶部50に記憶されている第2情報を新しい第2情報に更新する。
In step S73, the
It is determined that new second information has been input from the external device C. When the second
図8および図9の処理では、第1情報を変更する場合には、第1記憶部46に記憶されている第1情報を外部装置Cに入力する手順が含まれず、第2情報を変更する場合には、第2記憶部50に記憶されている第2情報を外部装置Cに入力する手順が含まれる。
In the processes of FIGS. 8 and 9, when the first information is changed, the procedure of inputting the first information stored in the
(第2実施形態)
図10〜図12を参照して、第2実施形態の人力駆動車用システム40Aについて説明する。第2実施形態の人力駆動車用システム40Aは、第1情報と第3情報とが対応するかを外部装置Cが判定する点が異なる点以外は、第1実施形態の人力駆動車用システム40と同様であるので、第1実施形態と共通する構成については、第1実施形態と同一の符号を付し、重複する説明を省略する。
(Second Embodiment)
The human-powered
図10に示されるように、人力駆動車用システム40Aは、人力駆動車用の第1電気コンポーネント42Aと、人力駆動車用の第2電気コンポーネント44と、を含む。人力駆動車用システム40Aは外部装置Cを含んでいてもよい。第1電気コンポーネント42Aは、第1記憶部46および第1通信部48を備える。第1電気コンポーネント42Aは、第1操作部58、第2操作部60、表示部62、および、第1制御部64Aを含む。
As shown in FIG. 10, the human-powered
第1通信部48は、外部装置Cに第1情報を送信するように構成される。外部装置Cは、第1情報に対応する第3情報が入力された場合、または、外部装置Cに第1情報に対応する第3情報が記憶されている場合、第1通信部48に第2電気コンポーネント44を第1状態から第2状態に切り替えるための第4情報を送信するように構成される。第4情報は、第1電気コンポーネント42Aの第1制御部64への指令信号を含む。
The
図11を参照して、外部装置Cが第1通信部48と通信可能な場合に、第1情報と第3情報とが対応するかを判定する処理について説明する。制御部C3は、制御部C3にバッテリ28または外部装置Cに含まれるバッテリから電力が供給されると、処理を開始して図11に示すフローチャートのステップS81に移行する。制御部C3は、電力が供給されている限り、所定周期ごとにステップS81からの処理を実行する。制御部C3は、人力駆動車用システム40Aを制御するためのアプリケーションソフトウェアが起動すると、処理を開始してステップS81に移行するようにしてもよい。この場合、制御部C3は、人力駆動車用システム40Aを制御するためのアプリケーションソフトウェアが起動している限り、所定周期ごとにステップS81からの処理を実行する。
A process of determining whether the first information and the third information correspond to each other when the external device C can communicate with the
制御部C3は、ステップS81において、第1情報が入力されたかを判定する。具体的には制御部C3は、例えば、外部装置Cが人力駆動車用システム40Aを制御するためのアプリケーションソフトウェアを起動している場合に通信部C2が第1電気コンポーネント42Aの第1通信部48から第1記憶部46に記憶されている第1情報を受信した場合、第1情報が入力されたと判定する。制御部C3は、第1情報が入力されない場合、処理を終了する。制御部C3は、第1情報が入力された場合、ステップS82に移行する。
The control unit C3 determines in step S81 whether or not the first information has been input. Specifically, the control unit C3, for example, the communication unit C2 when the external device C has started the application software for controlling the
制御部C3は、ステップS82において、第1情報に対応する第3情報が入力、または、第1情報に対応する第3情報が記憶されているかを判定する。具体的には、制御部C3は、ステップS81において入力された第1情報と対応する第3情報が操作部C4から入力された場合、第1情報に対応する第3情報が入力されたと判定する。制御部C3は、ステップS81において入力された第1情報と対応する第3情報が予め記憶部C1に記憶されている場合、第1情報に対応する第3情報が記憶されていると判定する。制御部C3は、第1情報に対応する第3情報が入力されない場合、または、第1情報に対応する第3情報が記憶されていない場合、処理を終了する。制御部C3は、第1情報に対応する第3情報が入力、または、第1情報に対応する第3情報が記憶されている場合、ステップS83に移行する。制御部C3は、ステップS83において、第4情報を第1電気コンポーネント42Aに送信し、処理を終了する。
In step S82, the control unit C3 determines whether the third information corresponding to the first information is input or the third information corresponding to the first information is stored. Specifically, when the third information corresponding to the first information input in step S81 is input from the operation unit C4, the control unit C3 determines that the third information corresponding to the first information has been input. .. When the third information corresponding to the first information input in step S81 is stored in the storage unit C1 in advance, the control unit C3 determines that the third information corresponding to the first information is stored. The control unit C3 ends the process when the third information corresponding to the first information is not input or when the third information corresponding to the first information is not stored. When the third information corresponding to the first information is input or the third information corresponding to the first information is stored, the control unit C3 proceeds to step S83. Control unit C3, at step S83, the sending the fourth information to the first
図12を参照して、外部装置Cから第4情報が第1電気コンポーネント42Aに送信された場合の第1電気コンポーネント42Aの第1制御部64の処理について説明する。第1制御部64は、第1制御部64にバッテリ28から電力が供給されると、処理を開始して図12に示すフローチャートのステップS91に移行する。第1制御部64は、電力が供給されている限り、所定周期ごとにステップS91からの処理を実行する。
Referring to FIG. 12, it describes the processing of the
第1制御部64は、ステップS91において、第1情報の送信要求があるか否かを判定する。第1情報の送信要求は、外部装置Cおよび第1制御部64の少なくとも一方によって設定される。第1情報の送信要求が外部装置Cによって設定される場合、例えば、外部装置Cの制御部C3は、外部装置Cが人力駆動車用システム40Aを制御するためのアプリケーションソフトウェアを起動している場合、かつ、第2電気コンポーネント44が第2状態の場合に、第1電気コンポーネント42Aに第1情報を第1通信部48から出力させるための指令信号を第1通信部48へ送信する。送信要求が第1制御部64によって設定される場合、例えば、第1制御部64は、第2電気コンポーネント44が第2状態の場合に、外部装置Cと通信可能な状態になった場合、第1情報の送信要求を設定する。第1制御部64は、第1情報の送信要求がない場合、処理を終了する。第1制御部64は、第1情報の送信要求がある場合、ステップS92に移行する。
In step S91, the
第1制御部64は、ステップS92において、第1情報を外部装置Cに送信し、ステップS93に移行する。外部装置Cでは、第1情報が入力されると、図11のステップS81において制御部C3が肯定判定し、ステップS82の処理が実行される。
In step S92, the
第1制御部64は、ステップS93において、第4情報が入力されたか否かを判定する。具体的には、第1制御部64は、外部装置Cが図11のステップS82の処理において肯定判定することによってステップS83において送信された第4情報が第1通信部48に入力されたか否かを判定する。外部装置Cが図11のステップS81において否定判定した場合、ステップS82において否定判定した場合、および、外部装置Cと第1通信部48が通信不能な場合、第4情報は第1電気コンポーネント42Aに入力されない。第1制御部64は、第4情報が入力されない場合、処理を終了する。第1制御部64は、第4情報が入力された場合、ステップS94に移行する。
In step S93, the
第1制御部64は、ステップS94において、第1記憶部46に記憶されている第1情報を第2電気コンポーネント44に送信して処理を終了する。第2電気コンポーネント44は、第1実施形態の図6と同様の処理によって、第1状態と第2状態とを切り替える。
In step S94, the
(第3実施形態)
図13を参照して、第3実施形態の人力駆動車用システム40Bについて説明する。第3実施形態の人力駆動車用システム40Bは、第2電気コンポーネント80がロック装置90を制御する点が異なる点以外は、第1実施形態の人力駆動車用システム40と同様であるので、第1実施形態と共通する構成については、第1実施形態と同一の符号を付し、重複する説明を省略する。
(Third Embodiment)
The human-powered
図13に示されるように、人力駆動車用システム40Bは、人力駆動車用の第1電気コンポーネント42(図2参照)と、人力駆動車用の第2電気コンポーネント80と、を含む。人力駆動車用システム40Bは外部装置C(図2参照)を含んでいてもよい。人力駆動車用システム40Bは、ロック装置90を含んでいてもよい。
As shown in FIG. 13, the human-powered
第2電気コンポーネント80は、第2記憶部50および第2通信部52を備え、第1状態と第1状態とは異なる第2状態とを切り替えて動作するように構成される。外部装置Cと第1通信部48とが通信可能に接続される場合において、第1情報と外部装置Cに入力または記憶される第3情報とが対応し、かつ、第1情報と第2情報とが対応する場合、第1情報と第3情報とが対応し、かつ、第2情報と第3情報とが対応する場合、または、第2情報と第3情報とが対応し、かつ、第1情報と第2情報とが対応する場合、第2電気コンポーネント80は、第1状態から第2状態に切り替わる。好ましくは、第1状態では、第2電気コンポーネント80の少なくとも1つの機能が制限される。第2状態では、第2電気コンポーネント80の少なくとも1つの機能が制限されない。好ましくは、第2電気コンポーネント80は、電動アクチュエータ54と、電動アクチュエータ54を制御する制御部56Aとを含む。好ましくは、第2電気コンポーネント80は、図1に示す人力駆動車10の推進をアシストするドライブユニット44A、電動変速機44B、電動サスペンション44C、および、電動シートポスト44Dの少なくともいずれか1つを含む。
The second
図13に示す第2判定部68は、第2電気コンポーネント80に含まれる。好ましくは、第2電気コンポーネント80は、第2記憶部50を制御する記憶制御部70を含む。好ましくは、第2電気コンポーネント80は、第1情報、第2情報、および、第3情報に応じて、第1状態と第2状態とを切り替える第1制御状態と、第1情報、第2情報、および、第3情報に応じて、第1状態と第2状態とを切り替えない第2制御状態と、を切り替えて動作するように構成される。
The
好ましくは、第2電気コンポーネント80は、人力駆動車10の走行を物理的に規制する規制状態と、人力駆動車10の走行を許容する解除状態と、を切り替え可能なロック装置90を制御するロック制御部82をさらに含む。ロック制御部82は、第2電気コンポーネント80が第1状態の場合にロック装置90を規制状態にし、第2電気コンポーネント80が第2状態の場合にロック装置90を解除状態にする。ロック制御部82は、第2制御部56に含まれる。
Preferably, the second
ロック装置90は、通信部92、制御部94、および、アクチュエータ96を含む。通信部92は、第2通信部52と、例えば、電力線通信(PLC)によって通信可能である。ロック制御部82は、第2電気コンポーネント80が第1状態の場合、ロック装置90を規制状態にするための信号を第2通信部52から通信部92に送信する。制御部94は、アクチュエータ96を制御して、ロック装置90を規制状態にする。制御部94は、第2電気コンポーネント80が第2状態の場合、ロック装置90を解除状態にするための信号を第2通信部52から通信部92に送信する。制御部94は、アクチュエータ96を制御して、ロック装置90を解除状態にする。アクチュエータ96は、電気モータおよびソレノイドの少なくとも一方を含む。
The locking
一例では、ロック装置90は、ブレーキ装置90Aを含む。ブレーキ装置90Aは、リ
ムブレーキ、ディスクブレーキ、ローラブレーキ、および、バンドブレーキの少なくとも1つを含む。ロック装置90がブレーキ装置90Aを含む場合、ロック装置90は規制状態において、車輪を制動する。ブレーキ装置90Aは、制動動作可能なモータを含んでいてもよい。ブレーキ装置90Aが電気モータを含む場合、電気モータは、電動アクチュエータ54と各別に設けられてもよい。ロック装置90は、ブレーキ装置90Aに代えて、または、加えて、フレーム16に設けられ、車輪のスポークの間に挿入可能な挿入部を有する一般的なロック装置を含んでいてもよい。
In one example, the locking
(第4実施形態)
図14および図15を参照して、第4実施形態の人力駆動車用システム40Cについて説明する。第4実施形態の人力駆動車用システム40Cは、第2電気コンポーネント44がロック装置100を含む点が異なる点以外は、第1実施形態の人力駆動車用システム40と同様であるので、第1実施形態と共通する構成については、第1実施形態と同一の符号を付し、重複する説明を省略する。
(Fourth Embodiment)
The human-powered
図14に示されるように、第2電気コンポーネント44は、人力駆動車10の走行を物理的に規制する規制状態と、人力駆動車10の走行を許容する解除状態と、を切り替え可能なロック装置100をさらに含む。第2電気コンポーネント44が第1状態の場合にロック装置100は規制状態となり、第2電気コンポーネント44が第2状態の場合にロック装置100は解除状態となる。
As shown in FIG. 14, the second
図15に示すロック装置100は、規制状態の場合、人力駆動車10のクランク12の回転を物理的に規制するように構成される。ロック装置100は、アクチュエータ102およびロック機構104を含む。ロック機構104は、例えば、クラッチを含む。ロック機構104は、フレーム16に対するクランク12の回転を規制する状態と、フレーム16に対するクランク12の回転を許容する状態とを切り替え可能に構成される。アクチュエータ102は、電気モータまたはソレノイドの少なくとも一方を含む。アクチュエータ102によって、ロック機構104の状態が切り換えられる。第2制御部56は、規制状態の場合、アクチュエータ102を制御してロック機構104によってフレーム16に対するクランク12の回転を規制する状態を形成する。第2制御部56は、解除状態の場合、アクチュエータ102を制御してロック機構104によってフレーム16に対するクランク12の回転を許容する状態を形成する。
The
(変形例)
各実施形態に関する説明は、本発明に従う人力駆動車用システムおよび人力駆動車用システムの制御方法が取り得る形態の例示であり、その形態を制限することを意図していない。本発明に従う人力駆動車用システムおよび人力駆動車用システムの制御方法は、例えば以下に示される各実施形態の変形例、および、相互に矛盾しない少なくとも2つの変形例が組み合わせられた形態を取り得る。以下の変形例において、実施形態の形態と共通する部分については、実施形態と同一の符号を付してその説明を省略する。
(Modification example)
The description of each embodiment is an example of possible modes of the human-powered vehicle system and the control method of the human-powered vehicle system according to the present invention, and is not intended to limit the mode. The control method of the human-powered vehicle system and the human-powered vehicle system according to the present invention may take, for example, a modification of each of the following embodiments and a combination of at least two modifications that are consistent with each other. .. In the following modification, the parts common to the embodiment are designated by the same reference numerals as those in the embodiment, and the description thereof will be omitted.
・第4実施形態において、ロック装置100は、ブレーキ装置を含んでいてもよい。この場合、例えば、ドライブユニット44Aの電動アクチュエータ54にロック装置が含まれ、電動アクチュエータ54は、制動動作可能に構成される。第2制御部56は、規制状態の場合、アクチュエータ102を制御して駆動機構20に含まれる回転体の回転を規制する。
-In the fourth embodiment, the
10…人力駆動車、12…クランク、40,40A,40B,40C…人力駆動車用システム、42,42A…第1電気コンポーネント、46…第1記憶部、48…第1通信部
、44,80…第2電気コンポーネント、44A…ドライブユニット、44B…電動変速機、44C…電動サスペンション、44D…電動シートポスト、50…第2記憶部、52…第2通信部、56A…制御部、54,54A,54B,54C,54D…電動アクチュエータ、58…第1操作部、60…第2操作部、62…表示部、64,64A…第1制御部、66…第1判定部、68…第2判定部、70…記憶制御部、82…ロック制御部、90,100…ロック装置、90A…ブレーキ装置、C…外部装置。
10 ... Human-powered vehicle, 12 ... Crank, 40, 40A, 40B, 40C ... Human-powered vehicle system, 42, 42A ... 1st electrical component, 46 ... 1st storage unit, 48 ... 1st communication unit, 44, 80 ... Second electric component, 44A ... Drive unit, 44B ... Electric transmission, 44C ... Electric suspension, 44D ... Electric seatpost, 50 ... Second storage unit, 52 ... Second communication unit, 56A ... Control unit, 54, 54A, 54B, 54C, 54D ... Electric actuator, 58 ... 1st operation unit, 60 ... 2nd operation unit, 62 ... Display unit, 64, 64A ... 1st control unit, 66 ... 1st judgment unit, 68 ... 2nd judgment unit , 70 ... Memory control unit, 82 ... Lock control unit, 90, 100 ... Lock device, 90A ... Brake device, C ... External device.
Claims (23)
第2情報を記憶する第2記憶部、および、前記第1通信部と通信可能な第2通信部を備え、第1状態と、前記第1状態とは異なる第2状態とを切り替えて動作するように構成される前記人力駆動車用の第2電気コンポーネントと、を含み、
前記第2電気コンポーネントは、前記外部装置に入力されるまたは記憶される第3情報、または、前記第3情報に関する情報を、前記第1電気コンポーネントを介して受信するように構成され、
前記外部装置と前記第1通信部とが通信可能に接続される場合において、
前記第1情報と前記第3情報とが対応し、かつ、前記第1情報と前記第2情報とが対応する場合、
前記第1情報と前記第3情報とが対応し、かつ、前記第2情報と前記第3情報とが対応する場合、または、
前記第2情報と前記第3情報とが対応し、かつ、前記第1情報と前記第2情報とが対応する場合、
前記第2電気コンポーネントは、前記第1状態から前記第2状態に切り替わる、人力駆動車用システム。 A first storage unit for storing the first information, a first electric component for a human-powered vehicle including a first communication unit capable of communicating with an external device, and a first electric component.
It includes a second storage unit that stores the second information and a second communication unit that can communicate with the first communication unit, and operates by switching between the first state and the second state different from the first state. Includes a second electrical component for said human-powered vehicle, which is configured as such.
The second electrical component is configured to receive third information input or stored in the external device, or information about the third information, via the first electrical component.
When the external device and the first communication unit are communicably connected,
Corresponding to the first information and the prior SL third information, and, if the first information and the second information corresponds,
When the first information and the third information correspond to each other, and the second information and the third information correspond to each other, or
When the second information and the third information correspond to each other, and the first information and the second information correspond to each other,
The second electric component is a system for a human-powered vehicle that switches from the first state to the second state.
前記第2状態では、前記第2電気コンポーネントの前記少なくとも1つの機能が制限されない、請求項1に記載の人力駆動車用システム。 In the first state, at least one function of the second electrical component is restricted.
The human-powered vehicle system according to claim 1, wherein in the second state, the at least one function of the second electrical component is not limited.
前記外部装置は、前記第1情報に対応する前記第3情報が入力された場合、または、前記外部装置に前記第1情報に対応する前記第3情報が記憶されている場合、前記第1通信部に前記第2電気コンポーネントを前記第1状態から前記第2状態に切り替えるための第4情報を送信するように構成される、請求項1または2に記載の人力駆動車用システム。 The first communication unit is configured to transmit the first information to the external device.
When the third information corresponding to the first information is input to the external device, or when the third information corresponding to the first information is stored in the external device, the first communication The system for a human-powered vehicle according to claim 1 or 2, wherein the second electric component is configured to transmit a fourth information for switching from the first state to the second state.
前記第1通信部は、前記第1情報を前記第2通信部に送信するように構成される、請求項5に記載の人力駆動車用システム。 The second determination unit is included in the second electrical component.
The human-powered vehicle system according to claim 5, wherein the first communication unit is configured to transmit the first information to the second communication unit.
前記第1情報は、第1手順で変更され、前記第2情報は、前記第1手順とは異なる第2手順で変更される、請求項7に記載の人力駆動車用システム。 The second storage unit stores the second information in a changeable manner, and stores the second information in a changeable manner.
The system for a human-powered vehicle according to claim 7, wherein the first information is changed in the first procedure, and the second information is changed in a second procedure different from the first procedure.
前記第2手順は、前記外部装置から前記第2電気コンポーネントへの前記第2情報の入力を含み、
前記記憶制御部は、前記外部装置から前記第2情報が入力された場合、前記第2情報を変更するように前記第2記憶部を制御する、請求項9に記載の人力駆動車用システム。 The second electrical component includes a storage control unit that controls the second storage unit.
The second procedure includes inputting the second information from the external device to the second electrical component.
The human-powered vehicle system according to claim 9, wherein the storage control unit controls the second storage unit so as to change the second information when the second information is input from the external device.
前記ロック制御部は、前記第2電気コンポーネントが前記第1状態の場合に前記ロック装置を前記規制状態にし、前記第2電気コンポーネントが前記第2状態の場合に前記ロック装置を前記解除状態にする、請求項1〜11のいずれか一項に記載の人力駆動車用システム。 It said second electrical component, a regulating state to physically restrict the travel of the human power drive vehicle, a released state to allow the running of the human-driven vehicle, the lock control unit for controlling the possible locking device switches the further Including
The lock control unit puts the lock device in the restricted state when the second electric component is in the first state, and puts the lock device in the unlocked state when the second electric component is in the second state. , The system for a human-powered vehicle according to any one of claims 1 to 11.
前記第2電気コンポーネントが前記第1状態の場合に前記ロック装置は前記規制状態となり、前記第2電気コンポーネントが前記第2状態の場合に前記ロック装置は前記解除状態となる、請求項1〜11のいずれか一項に記載の人力駆動車用システム。 The second electrical component further includes a restricting state to physically restrict the travel of the human power drive vehicle, a released state to allow the running of the human-driven vehicle, a locking device capable of switching,
Claims 1 to 11 claim that when the second electric component is in the first state, the lock device is in the regulated state, and when the second electric component is in the second state, the lock device is in the unlocked state. The system for a human-powered vehicle according to any one of the above.
前記第1状態において、前記制御部は、前記電動アクチュエータを停止させる、請求項21に記載の人力駆動車用システム。 The second electric component includes an electric actuator and a control unit that controls the electric actuator.
The human-powered vehicle system according to claim 21, wherein in the first state, the control unit stops the electric actuator.
第2情報を記憶する第2記憶部、および、前記第1通信部と通信可能な第2通信部を備え、第1状態と前記第1状態とは異なる第2状態とを切り替えて動作するように構成される前記人力駆動車用の第2電気コンポーネントと、を含む人力駆動車用システムの制御方法であって、
前記第2電気コンポーネントは、前記外部装置に入力されるまたは記憶される第3情報、または、前記第3情報に関する情報を、前記第1電気コンポーネントを介して受信するように構成され、
前記外部装置と前記第1通信部とが通信可能に接続される場合において、
前記第1情報と前記第3情報とが対応し、かつ、前記第1情報と前記第2情報とが対応する場合、
前記第1情報と前記第3情報とが対応し、かつ、前記第2情報と前記第3情報とが対応する場合、または、
前記第2情報と前記第3情報とが対応し、かつ、前記第1情報と前記第2情報とが対応する場合、
前記第2電気コンポーネントを、前記第1状態から前記第2状態に切り替える、人力駆動車用システムの制御方法。 A first storage unit for storing the first information, a first electric component for a human-powered vehicle including a first communication unit capable of communicating with an external device, and a first electric component.
It is provided with a second storage unit that stores the second information and a second communication unit that can communicate with the first communication unit, and operates by switching between the first state and the second state different from the first state. It is a control method of a system for a human-powered vehicle including the second electric component for the human-powered vehicle configured in the above.
The second electrical component is configured to receive third information input or stored in the external device, or information about the third information, via the first electrical component.
When the external device and the first communication unit are communicably connected,
Corresponding to the first information and the prior SL third information, and, if the first information and the second information corresponds,
When the first information and the third information correspond to each other, and the second information and the third information correspond to each other, or
When the second information and the third information correspond to each other, and the first information and the second information correspond to each other,
A control method for a human-powered vehicle system that switches the second electrical component from the first state to the second state.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018066078A JP6952002B2 (en) | 2018-03-29 | 2018-03-29 | Control method for human-powered vehicle system and human-powered vehicle system |
| DE102019107220.4A DE102019107220A1 (en) | 2018-03-29 | 2019-03-21 | A co-powered vehicle system and method for controlling a co-powered vehicle system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018066078A JP6952002B2 (en) | 2018-03-29 | 2018-03-29 | Control method for human-powered vehicle system and human-powered vehicle system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019172227A JP2019172227A (en) | 2019-10-10 |
| JP6952002B2 true JP6952002B2 (en) | 2021-10-20 |
Family
ID=67910207
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018066078A Active JP6952002B2 (en) | 2018-03-29 | 2018-03-29 | Control method for human-powered vehicle system and human-powered vehicle system |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6952002B2 (en) |
| DE (1) | DE102019107220A1 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7324689B2 (en) * | 2019-11-15 | 2023-08-10 | 株式会社シマノ | Controllers, Transmitters, External Devices and Configuration Systems |
| JP2022014318A (en) * | 2020-07-06 | 2022-01-19 | 株式会社シマノ | Communication system and control unit |
| DE102021121417A1 (en) * | 2020-08-31 | 2022-03-03 | Shimano Inc. | CONTROL DEVICE FOR A HUMAN-PROPELLED VEHICLE, CONTROL SYSTEM FOR A HUMAN-PROPELLED VEHICLE, AND METHOD FOR ADJUSTING THE CONTROL STATE OF THE CONTROL DEVICE |
| JP7544621B2 (en) | 2021-01-29 | 2024-09-03 | 株式会社シマノ | Control device for human-powered vehicles |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001180567A (en) * | 1999-12-21 | 2001-07-03 | Bridgestone Cycle Co | Control device for bicycle |
| JP4920479B2 (en) * | 2007-04-12 | 2012-04-18 | ブリヂストンサイクル株式会社 | Electric assist bicycle |
| JP6280856B2 (en) * | 2014-10-31 | 2018-02-14 | 株式会社シマノ | Bicycle control system |
| JP2016215845A (en) * | 2015-05-20 | 2016-12-22 | 日本電信電話株式会社 | Power-assisted bicycle, control system, control method and program |
| DE102015220084A1 (en) * | 2015-10-15 | 2017-04-20 | Conti Temic Microelectronic Gmbh | Electric bicycle, immobilizer for an electric bicycle and method of operating an electric bicycle |
| JP6797358B2 (en) * | 2016-09-15 | 2020-12-09 | オムロン株式会社 | Control device and control system |
| CN106394733A (en) * | 2016-10-12 | 2017-02-15 | 南京理工大学 | Double-authentication-based electric bicycle anti-theft system and authentication method |
| JP6743642B2 (en) | 2016-10-18 | 2020-08-19 | 富士通株式会社 | Housing material and manufacturing method thereof, wearable housing and manufacturing method thereof |
-
2018
- 2018-03-29 JP JP2018066078A patent/JP6952002B2/en active Active
-
2019
- 2019-03-21 DE DE102019107220.4A patent/DE102019107220A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| DE102019107220A1 (en) | 2019-10-02 |
| JP2019172227A (en) | 2019-10-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6952002B2 (en) | Control method for human-powered vehicle system and human-powered vehicle system | |
| CN110316310B (en) | Control device for human-powered vehicle | |
| CN110857134B (en) | Speed change control system of manpower-driven vehicle | |
| CN110126965B (en) | Control device for human-powered vehicle | |
| JP2019084895A (en) | Brake control device and brake system | |
| JP2024009328A (en) | Control device for human-powered vehicle | |
| JP2020029206A (en) | Control device for man power driving vehicle and drive unit for man power driving vehicle | |
| JP2021142946A (en) | ABS unit | |
| JP7440305B2 (en) | Control device for human-powered vehicles | |
| JP7191646B2 (en) | Manpowered vehicle controller | |
| JP7347929B2 (en) | Components for human-powered vehicles | |
| JP7277120B2 (en) | Control device for man-powered vehicles | |
| US20200010138A1 (en) | Information processing device | |
| JP2023054237A (en) | Controlling device for man-power drive vehicle | |
| JP7046704B2 (en) | Control device and pairing method | |
| JP2023070467A (en) | Controller, control system and control method for human power drive vehicle, and computer program | |
| JP7324689B2 (en) | Controllers, Transmitters, External Devices and Configuration Systems | |
| JP7312549B2 (en) | Human-powered vehicle controller, electronic device, and human-powered vehicle control system | |
| JP2022083310A (en) | Control device for human power-driven vehicle | |
| JP2022048512A (en) | Man-power drive vehicle control system, man-power drive vehicle control device and electronic device | |
| JP2020069985A (en) | Device for controlling human-powered drive vehicle | |
| JP2022073187A (en) | Control device for human power-driven vehicle | |
| JP7386127B2 (en) | Control device for human-powered vehicles | |
| JP7424754B2 (en) | Control device for human-powered vehicles | |
| JP2022182735A (en) | Control system for human-powered vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200326 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210126 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210326 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210921 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210927 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6952002 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |