JP5359108B2 - Magnetic bearing displacement detection method and detection apparatus - Google Patents
Magnetic bearing displacement detection method and detection apparatus Download PDFInfo
- Publication number
- JP5359108B2 JP5359108B2 JP2008207758A JP2008207758A JP5359108B2 JP 5359108 B2 JP5359108 B2 JP 5359108B2 JP 2008207758 A JP2008207758 A JP 2008207758A JP 2008207758 A JP2008207758 A JP 2008207758A JP 5359108 B2 JP5359108 B2 JP 5359108B2
- Authority
- JP
- Japan
- Prior art keywords
- rotating body
- displacement
- magnetic bearing
- permanent magnet
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C32/00—Bearings not otherwise provided for
- F16C32/04—Bearings not otherwise provided for using magnetic or electric supporting means
- F16C32/0406—Magnetic bearings
- F16C32/044—Active magnetic bearings
- F16C32/0444—Details of devices to control the actuation of the electromagnets
- F16C32/0446—Determination of the actual position of the moving member, e.g. details of sensors
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Mechanical Engineering (AREA)
- Control Of Electric Motors In General (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Magnetic Bearings And Hydrostatic Bearings (AREA)
Description
この発明は、磁気により非接触的に回転体を支持する磁気軸受において、前記回転体の軸の位置を検出する位置検出方法及び検出装置に係る。詳しくは、前記回転体が密閉金属容器内に備えられる磁気軸受装置(キャンドモーター)において、電磁石と回転体のギャップを検出する変位測定方法及び軸の位置検出装置に係る。 The present invention relates to a position detection method and a detection device for detecting a position of an axis of a rotating body in a magnetic bearing that supports the rotating body in a non-contact manner by magnetism. More specifically, the present invention relates to a displacement measuring method for detecting a gap between an electromagnet and a rotating body and a shaft position detecting apparatus in a magnetic bearing device (canned motor) in which the rotating body is provided in a sealed metal container.
電磁石を用いて回転体の位置を能動的に制御する制御式磁気軸受装置は、非接触で回転軸を制御するので、潤滑剤が必要なく、低トルク、低騒音での高速回転に適している。(特許文献1、特許文献2)
通常、制御式磁気軸受装置において、回転体の位置を検出する場合、特許文献3に示すようなホール素子を用いる検出方法や、特許文献4で示すような渦電流式や差動変圧器を用いた誘導式による検出方法がある。
The control type magnetic bearing device that actively controls the position of the rotating body using an electromagnet controls the rotating shaft in a non-contact manner, and therefore is suitable for high-speed rotation with low torque and low noise because no lubricant is required. . (
Usually, in a control type magnetic bearing device, when detecting the position of a rotating body, a detection method using a Hall element as shown in
図6は従来技術に係るキャン構造を有する磁気軸受装置12の要部断面図である。図6において、回転子9を備えた主軸1の側面に対向するように電磁石2と位置検出センサ13とが離間して配置されており、これらの電磁石2と位置検出センサ13とによって磁気軸受24が構成されている。主軸1には電磁石2に対応したターゲット18及び、位置検出センサ13に対応したターゲット5が取り付けられている(以降、回転子9を備えた主軸1に、ターゲット5、13が備えられたものを回転体21という)。
FIG. 6 is a cross-sectional view of the main part of a magnetic bearing
そして、位置検出センサ13はターゲット5と位置検出センサ13とのギャップ6を検出し、その検出出力信号に基づいて図示省略のコントローラにより電磁石2の磁気力が制御され、この制御された磁気力により回転体21が磁気浮上し、非接触で回転体21が支持される。また、回転体21と電磁石2及び位置検出センサ13との間には、キャン7が配置される。すなわち、回転体21がキャン7内に備えられている。そして、固定子8が回転子9に回転駆動力を付与するので、回転体21が回転する。ここで、回転体21をアキシャル方向(z軸方向)に制御する浮上用電磁石と、位置検出センサ13の出力によりギャップ6の変位を検出する変位検出器とは、図示省略している。
The
このように、図6で示すような、固定子8と回転体21の間に金属密閉容器(すなわち、キャン7)を有するキャンドモータ等では、回転体21が前記容器に接触しないように、ラジアル方向(x軸方向またはy軸方向)、アキシャル方向(z軸方向)に軸制御を行う。位置検出センサ3としては、安価な渦電流式変位検出器又は、密閉容器の影響を受けにくい差動変圧器を用いた誘導式が採用されている。
As described above, in a canned motor or the like having a metal hermetic container (that is, the can 7) between the
差動変圧器式では、図7に示すように一次コイルと二次コイルの電磁誘導作用を利用し、二次コイルの差分電圧e3を位置に換算することにより位置検出を行う。 In the differential transformer type, position detection is performed by converting the differential voltage e 3 of the secondary coil into a position using the electromagnetic induction action of the primary coil and the secondary coil as shown in FIG.
すなわち、誘導型センサはセンサコアにセンサコイルが巻回され構成を有する。ここで、図6で示した制御式軸受装置12を参照して位置検出センサ13に誘導型センサを用いた場合の位置検出方法について説明する。
That is, the inductive sensor has a configuration in which a sensor coil is wound around a sensor core. Here, a position detection method in the case where an inductive sensor is used as the
位置検出センサ13のセンサコイルに発振器から数十kHz以下の励磁電圧が与えられると、センサコア内に発生した磁束(すなわち位置検出センサ13より発生した磁束)がキャン7、ギャップ6を貫通し、ターゲット5内の磁性材料を通り、センサコア(すなわち位置検出センサ13)に戻る磁気ループが形成される。位置検出センサ13とターゲット5間の距離はセンサコイルのインダクタンス変化によって検出できる(特許文献4)。
When an excitation voltage of several tens of kHz or less is applied to the sensor coil of the
一方、渦電流センサはセンサコアとして非金属材料又は空芯コアが用いられ、このセンサコアにセンサコイルを巻回して渦電流センサが構成される。ここで、図6で示した制御式軸受装置12を参照して、位置検出センサ13に渦電流式センサを用いた場合の位置検出方法について説明する。
On the other hand, an eddy current sensor uses a non-metallic material or an air core as a sensor core, and a sensor coil is wound around the sensor core to constitute an eddy current sensor. Here, a position detection method when an eddy current sensor is used as the
位置検出センサ13のセンサコアには発振器から数MHz程度の励磁電圧が供給され、この励磁電圧によりセンサコア内に磁束が発生し(すなわち位置検出センサ13より磁束が発生し)、この磁束がキャン7、センサターゲット5に到達する。このとき、センサターゲット5表面で生じる渦電流により磁束が発生する。この磁束はセンサコアで発生する磁束と逆向きになっている。渦電流によって発生した磁束により、センサコイルのインダクタンスが変化する。このインダクタンス変化量によって位置検出センサ13とセンサターゲット5との間の距離を検出できる(特許文献4)。
しかしながら、上記従来技術に係るキャンドモータにおいて、一次コイルの交流電圧により、コア及び金属製キャンに渦電流が発生する。このため、交流電圧の増加に伴う検出誤差や回転体の回転速度増加に伴う発熱、回転損失等が問題となる。特に、キャンドモータは密閉されているので、発熱は少ないことが好ましい。 However, in the canned motor according to the above prior art, an eddy current is generated in the core and the metallic can due to the AC voltage of the primary coil. For this reason, the detection error accompanying the increase in the AC voltage, the heat generation accompanying the increase in the rotation speed of the rotating body, the rotation loss, etc. become problems. In particular, since the canned motor is hermetically sealed, it is preferable that heat generation is small.
なお、図8に示すように、渦電流式では、キャン7に渦電流14が流れるので、位置検出センサ13がキャン7自体を検出してしまい、回転体の変位を正確に検出することは困難である。
As shown in FIG. 8, in the eddy current type, since the
また、特許文献3のような磁気軸受装置がキャンを備えると、回転体の回転と同期してターゲットである永久磁石が回転するので、キャン上に渦電流が生じ検出精度が低下するおそれがある。すなわち、図6に示すキャンドモータ12の位置検出センサ13に、ホール素子を用いた場合においても、キャンを備えると渦電流の影響により検出精度が低下するおそれがある。
Further, when the magnetic bearing device as in
したがって、本発明は、回転体のラジアル(x軸方向またはy軸方向)及びアキシャル軸(z軸方向)制御を行う磁気軸受装置において、キャンやターゲット上での渦電流の発生を抑えた回転体の軸位置測定方法及び測定装置を提供することを目的としている。 Therefore, the present invention is a magnetic bearing device that performs radial (x-axis direction or y-axis direction) and axial axis (z-axis direction) control of a rotating body, and the rotating body that suppresses generation of eddy currents on a can and a target. It is an object of the present invention to provide an axial position measuring method and measuring apparatus.
そこで、請求項1に記載の磁気軸受変位検出方法は、磁気軸受に非接触支持される回転体の軸の端面に対向して第1の永久磁石を備え、前記軸の両端付近の側面にターゲットを設け、前記ターゲットから前記軸の径方向に離間して位置検出センサを設け、前記センサが、前記第1の永久磁石の静止磁場を検出することにより、前記回転体の変位を検出することを特徴とする。
Therefore, the magnetic bearing displacement detection method according to
請求項2に記載の磁気軸受変位検出方法は、請求項1に記載の磁気軸受変位検出方法において、前記センサが、前記ターゲットの中心に対して対称に備えられ、前記軸のラジアル方向及びアキシャル方向の変位を検出することを特徴とする。
Magnetic bearing displacement detecting method according to
請求項3に記載の磁気軸受変位検出方法は、請求項1に記載の磁気軸受変位検出方法において、前記第1の永久磁石と同じ磁極が対向するように、前記回転体の軸の端部にそれぞれ第2の永久磁石を備え、前記センサが、前記第2の永久磁石の静止磁場を検出することにより、前記回転体の変位を検出することを特徴とする。
The magnetic bearing displacement detection method according to
請求項4に記載の磁気軸受変位検出装置は、磁気軸受に非接触支持される回転体の軸の端面に対向して第1の永久磁石を備え、前記軸の両端付近の側面にターゲットを設け、前記ターゲットから前記軸の径方向に離間して位置検出センサを設け、前記センサが、前記第1の永久磁石の静止磁場を検出することにより、前記回転体の変位を検出することを特徴とする。 The magnetic bearing displacement detection device according to claim 4 includes a first permanent magnet facing the end surface of the shaft of the rotating body supported in a non-contact manner by the magnetic bearing, and a target is provided on a side surface near both ends of the shaft. the sensor output position置検spaced in the radial direction of the shaft from the target provided, by which the sensor detects the static magnetic field of said first permanent magnet, characterized by detecting a displacement of the rotary body And
請求項5に記載の磁気軸受変位検出装置は、請求項4に記載の磁気軸受変位検出装置において、前記センサが、前記ターゲットの中心に対して対称に備えられ、前記軸のラジアル方向及びアキシャル方向の変位を検出することを特徴とする。
Magnetic bearing displacement detector according to
請求項6に記載の磁気軸受変位検出装置は、請求項4に記載の磁気軸受変位検出装置において、前記第1の永久磁石と同じ磁極が対向するように、前記回転体の軸の端部にそれぞれ第2の永久磁石を備え、前記センサが、前記第2の永久磁石の静止磁場を検出することにより、前記回転体の変位を検出することを特徴とする。
The magnetic bearing displacement detection device according to
請求項7に記載の磁気軸受変位検出装置は、請求項4から請求項6に記載の磁気軸受変位検出装置において、前記回転子は、金属製の密閉容器内に備えられることを特徴とする。 A magnetic bearing displacement detection device according to a seventh aspect is the magnetic bearing displacement detection device according to the fourth to sixth aspects, wherein the rotor is provided in a metal hermetic container.
請求項1から請求項3に記載された磁気軸受変位検出方法及び請求項4から請求項7に記載された磁気軸受変位検出装置によれば、渦電流の発生を抑制できる。
According to the magnetic bearing displacement detection method described in
特に、請求項2に記載の磁気軸受変位検出方法によれば、請求項1の効果に加え、回転子のアキシャル方向(z軸方向)の変位を検出することができるので、新たにアキシャル方向(z軸方向)の変位を検出する位置検出センサを設ける必要がない。 In particular, according to the magnetic bearing displacement detection method of the second aspect, in addition to the effect of the first aspect, since the displacement of the rotor in the axial direction (z-axis direction) can be detected, a new axial direction ( There is no need to provide a position detection sensor for detecting displacement in the z-axis direction).
そして、請求項3に記載の磁気軸受変位検出方法によれば、請求項1の効果に加え、回転子のアキシャル方向(z軸方向)の変位を抑制することができる。 According to the magnetic bearing displacement detection method of the third aspect, in addition to the effect of the first aspect, the displacement of the rotor in the axial direction (z-axis direction) can be suppressed.
また、請求項4に記載の磁気軸受変位検出装置により、請求項1に記載の磁気軸受変位検出方法が実現できる。
Further, the magnetic bearing displacement detection device according to
さらに、請求項5に記載の磁気軸受変位検出装置により、請求項2に記載の磁気軸受変位検出方法が実現できる。
Furthermore, the magnetic bearing displacement detection device according to
そして、請求項6に記載の磁気軸受変位検出装置により、請求項3に記載の磁気軸受変位検出方法が実現できる。
Then, the magnetic bearing displacement detection device according to
特に請求項7に記載の磁気軸受変位検出装置においては、磁気軸受が金属製の密閉容器(キャン)を備えた場合、前記密閉容器上での渦電流の発生を抑制することができる。 In particular, in the magnetic bearing displacement detection device according to the seventh aspect, when the magnetic bearing includes a metal sealed container (can), generation of eddy current on the sealed container can be suppressed.
したがって、以上の発明によれば、渦電流による検出精度の低下及び熱的問題を解決できる。 Therefore, according to the above invention, it is possible to solve a decrease in detection accuracy due to eddy currents and a thermal problem.
(実施形態1)
本発明の第1実施形態に係る軸位置測定装置について図1を参照して詳細に説明する。なお、図6に示された装置類と同一部分には同一符号を付して、その詳しい説明は省略する。
(Embodiment 1)
The shaft position measuring apparatus according to the first embodiment of the present invention will be described in detail with reference to FIG. The same parts as those in the apparatus shown in FIG. 6 are denoted by the same reference numerals, and detailed description thereof is omitted.
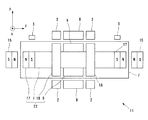
図1は、本発明の第1の実施形態に係るキャンドモータ10の要部断面図である。キャンドモータ10は、回転体21を備えている。回転体21は、固定子9、主軸1、電磁石2に対応したターゲット18及び、位置検出センサ3に対応したターゲット5からなる。
FIG. 1 is a cross-sectional view of a main part of a canned
図1に示すように、回転子9を備えた主軸1に対向するように電磁石2と位置検出センサ3とが配置されており、これらの電磁石2と位置検出センサ3とによって磁気軸受4が構成されている。そして、主軸1には電磁石2に対応したターゲット18及び、位置検出センサ3に対応したターゲット5が取り付けられている。
As shown in FIG. 1, an
また、回転体21と磁気軸受4との間には、キャン7が挿入されている。すなわち、回転体21がキャン7内に備えられている。そして、固定子8が、回転子9に回転駆動力を与えることにより、回転体21が回転する。回転体21の軸心上の両端には、回転体21から離間して電磁鋼部材16が備えられている。電磁鋼部材16の端部付近には、位置検出センサ3が備えられ、電磁鋼部材16の中央部には、永久磁石15が備えられている。このとき、永久磁石15は、回転体21の軸心の延長線上に位置するように配置する。そして、位置検出センサ3が永久磁石15の静止磁場を検出する。位置検出センサ3としては、ホール素子が例示される。
A can 7 is inserted between the
図1の破線で示したように、永久磁石15による磁束は、回転体21の主軸1を中心として放射状に、キャン7、ターゲット5、キャン7、位置検出センサ3、電磁鋼部材16を通る。この磁束は静止磁場であるため、ギャップ6が平衡している状態では、キャン7やターゲット5などに磁束の変化が生じない。すなわち、ターゲット5が高速回転しても回転による磁束の変化がない。ゆえに、回転体21が回転してもキャン7等に渦電流が生じることがない。
As indicated by a broken line in FIG. 1, the magnetic flux generated by the
もし、何らかの要因で回転体21の位置が中心の位置からずれると、ギャップ6が増減する。すると、ギャップ6の変位の逆数に比例して磁束が変化するので、回転体21のラジアル方向(x軸方向またはy軸方向)及びアキシャル方向(z軸方向)の変位を位置検出センサ3で検出することができる。
If the position of the
この場合、ギャップ6の不均一により磁束が変化するが、微小であるために渦電流式、インダクタンス式に比べギャップ検出精度の低下は問題とならない。
In this case, the magnetic flux changes due to the non-uniformity of the
次に、図2及び図3を参照して、位置検出センサ3による磁気軸受4と回転体21とのギャップ検出例を示す。図2(a)は、図1に示される第1実施形態に係る軸位置測定装置のA−A断面、図2(b)は、図1に示される第1実施形態に係る軸位置測定装置のB−B断面、図3は検出制御の流れを示した流れ図である。
Next, referring to FIGS. 2 and 3, an example of detecting the gap between the magnetic bearing 4 and the
図2(a)、図2(b)に示すように、ターゲット5を中心として対称に配置された2つの位置検出センサ3がターゲット5の位置を検出する。これらの検出値の差が主軸1のラジアル方向(x軸方向またはy軸方向)の変位として検出できる。
As shown in FIGS. 2A and 2B, the two
また、ターゲット5を中心として対称に配置されたx軸上の2つの位置検出センサ3において、その検出磁束が共に増加(または、共に減少)した場合には、アキシャル方向(z軸方向)への変位があったと判断できる。同様に、y軸上に備えられた位置検出センサ3についても同様にアキシャル方向(z軸方向)への変位を検出できる。そして、主軸1の両端に設けられたそれぞれの位置検出センサ3の情報よりアキシャル方向(z軸方向)への変位検出精度を向上させることができる。
Further, in the two
すなわち、図2(a)に示すように、主軸1を介してx軸対称(または、y軸対称)に位置検出センサ3を配置することによりアキシャル方向(z軸方向)の位置検出を別途具備しなくても、アキシャル軸(z軸方向)変位を検出することができる。
That is, as shown in FIG. 2 (a), the
さらに、図3を参照して検出制御の流れを説明する。位置検出センサ3としてホール素子を用いた例で説明する。位置検出センサ3には、位置検出センサ3に対して電源を供給し、これによって位置検出センサ3から出力された電気信号を受信する制御部19が備えられている。そして、制御部19には、受信した電気信号より回転体21の位置検出を行う演算処理部20が備えられている。
Furthermore, the flow of detection control will be described with reference to FIG. An example in which a Hall element is used as the
まず、制御部19の電源がONとなり、位置検出センサ3(ホール素子)の駆動端子に定電流又は定電圧が供給される。位置検出センサ3は、出力端子より位置検出センサ3にかかる磁場に応じた信号を制御部19に出力する。制御部19は、その出力信号をゲイン調整、オフセット調整し、フィルタを介して演算処理部20に出力する。演算処理部20は、制御部19からの信号をもとに位置補正し、回転体21の位置検出が行われる。
First, the power source of the
以上の流れにより、位置検出センサ3が永久磁石15の磁場を検出し、この磁場の変化により回転体21の位置変化を検出することができる。なお、位置検出センサ3としては、ホール素子に限らず、静止磁場を検出できるものを適宜用いればよい。
With the above flow, the
(実施形態2)
図4は、本発明の第2実施形態に係る軸位置測定装置について図4を参照して詳細に説明する。
(Embodiment 2)
FIG. 4 describes in detail an axial position measuring apparatus according to the second embodiment of the present invention with reference to FIG.
第1実施形態では、ギャップ6検出用の位置検出センサ3として、x軸方向の変位を検出するセンサ及びy軸方向の変位を検出するセンサをそれぞれ1対設けている。これに対して、第2実施形態では、図4に示すように、ギャップ6検出用の位置検出センサ3として、x軸方向の変位を検出するセンサ及びy軸方向の変位を検出するセンサそれぞれ1つずつ設けている。このように、位置検出センサ3の数を減らすことによりコスト削減が可能となる。
In the first embodiment, a pair of sensors for detecting displacement in the x-axis direction and sensors for detecting displacement in the y-axis direction are provided as the
以上のように、第1実施形態と比較して第2実施形態では位置検出センサ3の数が異なる。したがって、詳細な構成については図1と同じであり、その詳しい説明は省略する。そして、制御の流れについても、図3と同じ方法により行うこととし、その詳細な説明は省略する。
As described above, the number of
(実施形態3)
本発明の第3実施形態に係る軸位置測定装置11について図5を参照して詳細に説明する。なお、図1に示された装置類と同一部分には同一符号を付して、その詳しい説明は省略する。
(Embodiment 3)
The shaft
図5は、本発明の第3の実施形態に係るキャンドモータ11の要部断面図である。キャンドモータ11は、回転体22を備えている。回転体22は、固定子9、主軸1、位置検出センサ3に対応するターゲット5、電磁石2に対応するターゲット18、及び主軸1に備えられる永久磁石17からなる。
FIG. 5 is a cross-sectional view of a main part of a canned
図5に示すように、本発明の第3実施形態に係る軸位置測定装置11では、主軸1の両端に離間して備えられる永久磁石15と同じ磁極が対向するように、永久磁石17が主軸1の両端に備えるられている。すなわち、永久磁石17が主軸1の両端に備られることにより、永久磁石17と永久磁石15との間に磁気的な反発力が働き、回転体22のアキシャル方向(z軸方向)の変位を抑制することができる。
As shown in FIG. 5, in the shaft
そして、位置検出センサ3は、永久磁石17の静止磁場を検出して回転体22の位置検出を行う。なお、図5では、位置検出センサ3の配置は、第2実施形態と同じであるが、第1実施形態のようにx軸方向及びy軸方向それぞれに1対ずつ設けてもよい。
The
以上のように、第3の実施形態のような構成を持つ軸位置測定装置11によれば、第1の実施形態の渦電流を抑制する効果に加えて、回転体22のアキシャル方向(z軸方向)の変位を抑制することができる。そして、アキシャル方向(z軸方向)の変位を抑制するために備えられる永久磁石17の静止磁場を位置検出センサ3で検出することにより、主軸1のラジアル方向(x軸方向またはy軸方向)の変位を検出することができる。
As described above, according to the axial
以上のように、本発明に係る第1実施形態から第3実施形態の軸位置測定方法及び測定装置によれば、永久磁石の静止磁場を利用して、回転体の変位を検出することができる。そして、回転体の変位を検出するために静止磁場を利用するので、キャンやターゲット上に渦電流が発生することを抑制することができる。 As described above, according to the axial position measuring method and measuring apparatus of the first to third embodiments according to the present invention, the displacement of the rotating body can be detected using the static magnetic field of the permanent magnet. . And since a static magnetic field is utilized in order to detect the displacement of a rotary body, it can suppress that an eddy current generate | occur | produces on a can and a target.
すなわち、渦電流の発生が抑制されることにより、発熱が少なくなるとともに渦電流による軸位置検出精度の低下を防ぐことができる。特に、金属製のキャンを備えるキャンドモータにおいては、渦電流の発生を抑えることにより、発熱の問題を解消し、回転体の位置を精度良く検出することができる。 That is, by suppressing the generation of eddy currents, heat generation can be reduced and a decrease in shaft position detection accuracy due to eddy currents can be prevented. In particular, in a canned motor equipped with a metallic can, by suppressing the generation of eddy current, the problem of heat generation can be solved and the position of the rotating body can be detected with high accuracy.
1…主軸
3、13…位置検出センサ
5…ターゲット
6…ギャップ
7…キャン
9…回転子
10、11、12…軸位置測定装置
14…渦電流
15、17…永久磁石
16…電磁鋼部材
19…制御部
20…演算処理部
21、22…回転体
DESCRIPTION OF
Claims (7)
前記軸の両端付近の側面にターゲットを設け、
前記ターゲットから前記軸の径方向に離間して位置検出センサを設け、
前記センサが、前記第1の永久磁石の静止磁場を検出することにより、
前記回転体の変位を検出する
ことを特徴とする磁気軸受変位検出方法。 A first permanent magnet is provided opposite to the end face of the shaft of the rotating body supported in a non-contact manner by the magnetic bearing,
Provide a target on the side surface near both ends of the shaft ,
Provided, a position detection sensor spaced apart from the target in a radial direction of said shaft,
The sensor detects a static magnetic field of the first permanent magnet,
A magnetic bearing displacement detection method, wherein the displacement of the rotating body is detected.
前記軸のラジアル方向及びアキシャル方向の変位を検出する
ことを特徴とする請求項1に記載の磁気軸受変位検出方法。 The sensor is provided symmetrically with respect to the center of the target;
The magnetic bearing displacement detection method according to claim 1, wherein a displacement in a radial direction and an axial direction of the shaft is detected.
前記センサが、前記第2の永久磁石の静止磁場を検出することにより、
前記回転体の変位を検出する
ことを特徴とする請求項1に記載の磁気軸受変位検出方法。 A second permanent magnet is provided at each end of the shaft of the rotating body so that the same magnetic poles as the first permanent magnet face each other;
The sensor detects a static magnetic field of the second permanent magnet,
The magnetic bearing displacement detection method according to claim 1, wherein the displacement of the rotating body is detected.
前記軸の両端付近の側面にターゲットを設け、
前記ターゲットから前記軸の径方向に離間して位置検出センサを設け、
前記センサが、前記第1の永久磁石の静止磁場を検出することにより、
前記回転体の変位を検出する
ことを特徴とする磁気軸受変位検出装置。 A first permanent magnet is provided opposite to the end face of the shaft of the rotating body supported in a non-contact manner by the magnetic bearing,
Provide a target on the side surface near both ends of the shaft ,
Provided, a position detection sensor spaced apart from the target in a radial direction of said shaft,
The sensor detects a static magnetic field of the first permanent magnet,
A magnetic bearing displacement detecting device for detecting a displacement of the rotating body.
前記軸のラジアル方向及びアキシャル方向の変位を検出する
ことを特徴とする請求項4に記載の磁気軸受変位検出装置。 The sensor is provided symmetrically with respect to the center of the target;
The magnetic bearing displacement detection device according to claim 4, wherein a displacement in a radial direction and an axial direction of the shaft is detected.
前記センサが、前記第2の永久磁石の静止磁場を検出することにより、
前記回転体の変位を検出する
ことを特徴とする請求項4に記載の磁気軸受変位検出装置。 A second permanent magnet is provided at each end of the shaft of the rotating body so that the same magnetic poles as the first permanent magnet face each other;
The sensor detects a static magnetic field of the second permanent magnet,
The magnetic bearing displacement detection device according to claim 4, wherein the displacement of the rotating body is detected.
ことを特徴とする請求項4から請求項6のうちいずれか1項に記載の磁気軸受変位検出装置。 The magnetic bearing displacement detection device according to claim 4, wherein the rotating body is provided in a metal hermetic container.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008207758A JP5359108B2 (en) | 2008-08-12 | 2008-08-12 | Magnetic bearing displacement detection method and detection apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008207758A JP5359108B2 (en) | 2008-08-12 | 2008-08-12 | Magnetic bearing displacement detection method and detection apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010043684A JP2010043684A (en) | 2010-02-25 |
| JP5359108B2 true JP5359108B2 (en) | 2013-12-04 |
Family
ID=42015230
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008207758A Expired - Fee Related JP5359108B2 (en) | 2008-08-12 | 2008-08-12 | Magnetic bearing displacement detection method and detection apparatus |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5359108B2 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6627400B2 (en) | 2014-11-03 | 2020-01-08 | 株式会社デンソー | Electric motor, control device, and motor control system |
| CN118282134B (en) * | 2024-06-03 | 2024-09-03 | 珠海格力电器股份有限公司 | Rotor structure control method and magnetic suspension motor device |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3930170B2 (en) * | 1998-02-18 | 2007-06-13 | 株式会社荏原製作所 | Circulation fan device |
| JP2003106333A (en) * | 2001-09-28 | 2003-04-09 | Ntn Corp | Magnetic bearing device |
| JP4138739B2 (en) * | 2004-12-10 | 2008-08-27 | 株式会社イワキ | Magnetic bearing |
-
2008
- 2008-08-12 JP JP2008207758A patent/JP5359108B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010043684A (en) | 2010-02-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6885121B2 (en) | Controlled radial magnetic bearing | |
| US8288906B2 (en) | Maglev motor and pump | |
| JP3919436B2 (en) | Magnetic levitation rotating machine | |
| US8482174B2 (en) | Electromagnetic actuator | |
| US9559565B2 (en) | Homopolar permanent-magnet-biased action magnetic bearing with an integrated rotational speed sensor | |
| JP2017106899A (en) | Device for detecting position of rotator shaft in axial direction and application of the device to rotary machine | |
| US20160312826A1 (en) | Protective bearing, bearing unit, and vacuum pump | |
| US10683893B2 (en) | Magnetic bearing device and vacuum pump | |
| CN112913120B (en) | Motor with more accurate measurement | |
| WO2015019463A1 (en) | Electric motor system and magnetic bearing system | |
| Asama et al. | Evaluation of magnetic suspension performance in a multi-consequent-pole bearingless motor | |
| JP5192271B2 (en) | Magnetic bearing device | |
| JP5359108B2 (en) | Magnetic bearing displacement detection method and detection apparatus | |
| JP4889350B2 (en) | Magnetic bearing device | |
| JP4138735B2 (en) | Magnetic bearing | |
| JP4220859B2 (en) | Magnetic bearing | |
| Peralta et al. | Experimental electromechanical characterization of slotted and slotless miniature bearingless drives | |
| JP4138739B2 (en) | Magnetic bearing | |
| Noh et al. | Homopolar bearingless slice motors driving reluctance rotors | |
| US20240200597A1 (en) | Combined Axial/Radial Magnetic Bearing | |
| KR101438403B1 (en) | Control Method and Magnetic Bearing | |
| RU2660447C1 (en) | Homopolar magnetic bearing for high-speed electric machines | |
| JP7050284B2 (en) | Rotating machine and displacement detection sensor | |
| JP2010031873A (en) | Magnetic levitation pump device | |
| JP5188379B2 (en) | Rotation angle sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110510 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120529 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120605 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120806 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20120806 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130219 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130416 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130806 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130819 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |