JP4005267B2 - Piezoelectric actuator and driving method of piezoelectric actuator - Google Patents
Piezoelectric actuator and driving method of piezoelectric actuator Download PDFInfo
- Publication number
- JP4005267B2 JP4005267B2 JP13566699A JP13566699A JP4005267B2 JP 4005267 B2 JP4005267 B2 JP 4005267B2 JP 13566699 A JP13566699 A JP 13566699A JP 13566699 A JP13566699 A JP 13566699A JP 4005267 B2 JP4005267 B2 JP 4005267B2
- Authority
- JP
- Japan
- Prior art keywords
- vibrating
- piezoelectric
- piezoelectric actuator
- moving
- moving body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Description
【0001】
【発明の属する技術分野】
本発明は、時計、カメラ、プリンタ、情報記憶装置などに用いる圧電アクチュエータ及び圧電アクチュエータの駆動方法に係り、特に圧電アクチュエータの安定、高出力、高効率化に関する。
【0002】
【従来の技術】
現在OA機器、情報処理機器の小型化が進み、これに伴って、駆動・搬送に用いる動力源として圧電アクチュエータが注目されている。従来の圧電アクチュエータの例として、振動片型圧電アクチュエータを図2に示す。
振動片型アクチュエータは、伸縮振動をする圧電体2と、屈曲振動をする振動片1と、圧電体2の伸縮振動を振動片1に伝達するホーン6と、振動片1と接触し、且つ振動片1と相対的に微小な傾きをもつ、移動体8からなる。
【0003】
圧電体2に伸縮振動を生じさせる周波数で、正弦波等の駆動信号を入力すると、その振動エネルギは、ホーン6を介して、振動片1に伝播する。そして、同周波数により屈曲振動を発生するよう設計された振動片1との、屈曲振動と圧電体2との伸縮振動との合成により、振動片1の先端に、楕円運動を発生させる。それにより、振動片1と移動体8間に摩擦力が働き、移動体8は、駆動力を得て移動する。
【0004】
【発明が解決しようとする課題】
しかし、従来の振動片型圧電アクチュエータは、圧電体2の伸縮振動と振動片1の屈曲振動の相関が不十分であり、振動片1先端に生じる楕円運動の方向は、一意に制御することができず、所望の運動方向とは、逆の方向に運動してしまう可能性があった。それにより、移動体は、所望の移動方向とは、逆の方向に運動してしまうおそれがあった。
【0005】
また、振動片1と移動体8とは、振動片1が移動体8を突く構造であるため、適当な傾きが必要であった。それは、製造及び構成を困難とさせていた。また、振動片1の先端部は、衝突の繰り返しであるため、摩耗が生じ、駆動特性が低下するおそれがあった。
よって、本発明は、所望の駆動方向が得られ、且つ移動体の移動方向と鉛直をなす方向の振動成分のみならず、移動体の移動方向と平行をなす方向の振動成分を増大させることにより、移動体に対し、大きな駆動力を発生させることのできる圧電アクチュエータを提供することを目的とする。
【0006】
【課題を解決するための手段】
本発明にかかわる圧電アクチュエータは、移動体と、振動体からなる圧電アクチュエータにおいて、前記振動体は、少なくとも一つの第一の圧電体を備え、且つ前記移動体の移動方向と平行をなす方向に、大きな振動成分を持つ少なくとも一つの第一の振動部と、少なくとも一つの第二の圧電体を備え、且つ前記移動体の移動方向と鉛直をなす方向に、大きな振動成分を持つ少なくとも一つの第二の振動部から構成され、且つ前記振動体は、少なくとも一つの固定端及び少なくとも一つの自由端を有することを特徴としている。
【0007】
これによれば、移動体の移動方向と平行をなす方向に大きな振動成分を持つ、第一の振動部と、移動体の移動方向と鉛直をなす方向に、大きな振動成分を持つ、第二の振動部により、振動体を構成することにより、移動体の移動方向と鉛直をなす方向のみならず、移動体の移動方向と同一の方向に対しても、大きな出力を発生させることが可能となる。
【0008】
また、少なくとも一つの第一の圧電体と、少なくとも一つの第二の圧電体を用いることにより、第一の振動部と第二の振動部の振動方向の制御が可能となる。また、第一の振動部、及び第二の振動部形状を変えることにより、速度、駆動力に柔軟に対応したアクチュエータを作製することが可能である。
また、本発明にかかわる圧電アクチュエータは、移動体と、振動体からなる圧電アクチュエータにおいて、前記振動体は、少なくとも一つの第一の圧電体を備え、且つ前記移動体の移動方向と鉛直をなす方向に、大きな振動成分を持つ少なくとも一つの第一の振動部と、少なくとも一つの第二の圧電体を備え、且つ前記移動体の移動方向と平行をなす方向に、大きな振動成分を持つ少なくとも一つの第二の振動部から構成され、且つ前記振動体は、少なくとも一つの固定端及び少なくとも一つの自由端を有することを特徴としている。
【0009】
これによれば、上記の圧電アクチュエータと同様な効果が得られる。
また、本発明にかかわる圧電アクチュエータは、上記2つの圧電アクチュエータにおいて、前記振動体の有する前記第一の振動部は、両端支持弾性体からなり、
前記第二の振動部は、前記第一の振動部に支持部を設けた一端支持他端自由弾性体からなる振動体であることを特徴としている。
【0010】
これによれば、上記2つの圧電アクチュエータと同様の効果に加え、両端支持した第一の振動部と、一端支持他端自由の第二の振動部により、振動体を構成することにより、振動体を単純化し、小型化が可能となるため、圧電アクチュエータを小型化することが可能となる。
また、本発明にかかわる圧電アクチュエータは、上記3つの圧電アクチュエータにおいて、前記第一の振動部の固有振動数と、前記第二の振動部の固有振動数が等しいことを特徴としている。
【0011】
これによれば、上記3つの圧電アクチュエータにおいて、第一の振動部の固有振動数と、第二の振動部の固有振動数を合わせることにより、振動体全体の振動を一定にし、駆動安定化することが可能となる。また、固有振動数を用いることにより、振動体は共振し、高出力、高効率化が可能となる。
また、本発明にかかわる圧電アクチュエータの駆動方法は、上記の圧電アクチュエータにおいて、前記第一及び第二の圧電体に前記第一及び第二の振動部が固有振動数で振動するような周波数の駆動信号を入力し、前記第一の振動部の、前記移動体の移動方向と平行の方向をなす振動成分と、前記第二の振動部の、前記移動体の移動方向と鉛直の方向をなす振動成分とを合成し、前記振動体に楕円運動を生じ、前記移動体を移動させることを特徴としている。
【0012】
これによれば、上記の圧電アクチュエータにおいて、振動体を構成する第一の振動体と第二の振動体の振動成分を合成し、振動体に楕円運動を生じさせ、移動体に対し、駆動力を与えることが可能となることを示している。
また、本発明にかかわる圧電アクチュエータ及び圧電アクチュエータの駆動方法は、上記5つの圧電アクチュエータにおいて、前記移動体と前記振動体に対し、加圧力を供与する加圧材を備えたことを特徴としている。
【0013】
これによれば、加圧材を設けることにより、振動体と移動体との間に、適切な摩擦力が生じさせることが可能となるため、移動体の重力に加え、加圧材から、垂直力を得ることが可能となり、移動体の駆動の高出力、安定化が可能となる。
また、本発明にかかわる圧電アクチュエータ及び圧電アクチュエータの駆動方法は、上記6つの圧電アクチュエータにおいて、前記振動体を複数用いたことを特徴としている。
【0014】
それにより、上記初めの2つの圧電アクチュエータの効果に加えて、例えば、複数振動体を同一方向に配置することにより、移動体の駆動力を増加させることが可能であり、また、複数振動体方向をマトリックス状に配置することにより、リニア型や2次元駆動アクチュエータを構成することが可能となる。
【0015】
【発明の実施の形態】
《実施の形態1》
以下、図1を参照して本発明を適用した実施の形態1を詳細に説明する。
図1は、実施の形態1に係る圧電アクチュエータを示す図である。
この圧電アクチュエータは、第一の振動部14と、第二の振動部15、第一の圧電体16、第二の圧電体17、固定端18からなる振動体4と、振動体4と接触することにより駆動する移動体8からなる。
【0016】
第一の圧電体16に駆動信号を入力することにより、第一の圧電体16に歪みが生じ、第一の振動部14には、移動体8の移動方向と平行をなす方向に振動を生じる。また、第二の圧電体17に駆動信号を入力することにより、第二の振動部15には、移動体8の移動方向と鉛直をなす方向に振動を生じる。それにより、移動体8と接触する振動体4の先端部は、楕円運動をし、移動体8に対して、摩擦力を与え、移動体8を移動させる。
【0017】
第一の圧電体16及び第二の圧電体17としては、例えば、チタン酸バリウム、チタン酸ジルコン酸鉛、ニオブ酸リチウム、タンタル酸リチウム等を用いる。
また、第一の圧電体16及び第二の圧電体17は、第一の振動部14及び第二の振動部15に対して、接着剤を用いて取り付けられるか、もしくは、蒸着等により直接、圧電体2を第一の振動部14及び第二の振動部15に対して形成する。
《実施の形態2》
以下、圧電アクチュエータと圧電アクチュエータの駆動方法について、実施の形態2において、詳細に説明する。
【0018】
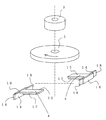
図3は、実施の形態2に係る圧電アクチュエータを示す図である。
圧電アクチュエータは、振動体4と回転移動体5と加圧材3からなる。
振動体4は、固定端18において、両端支持された第一の振動部14と第一の振動部14の中央付近に支持部を有す、一端支持他端自由の第二の振動部15、及び第一の振動部14に取り付けられた第一の圧電体16と第二の振動部15に取り付けられ、第一の圧電体16と同極性に分極された第二の圧電体17からなる。
【0019】
ここで、第一の圧電体16の分極方向は、第一の振動部14に対し、第一の圧電体16が貼り付けられている逆面から正電圧を加えた場合、伸び歪みを生じる向きで、その方向を+とする。同様に、第二の圧電体17の分極方向は、第二の振動部15に対し、第二の圧電体17が貼り付けられている逆面から正電圧を加えた場合、伸び歪みを生じる向きで、その方向を+とする。
【0020】
また、第一の圧電体16は、第一の入力電圧12により、駆動信号を入力され、第二の圧電体17は、第二の入力電圧13により、駆動信号を入力される。
また、第一の振動部14と第二の振動部15の屈曲1次固有振動数が等しくなるよう設計されている。
第一の振動部14と第二の振動部15は、支持部9によって、つながっている。
【0021】
回転移動体5は、振動体4からの駆動力を得て移動する。
加圧材3は、振動体4と回転移動体5に対し、適切な圧力を与えることにより、振動体4と回転移動体5とに生ずる摩擦力を調節する。加圧材3としては、錘の他に、ばね等の弾性体等を用いても良い。
図4は、実施の形態2に係る圧電アクチュエータの駆動方法を示す図である。そのうち、圧電アクチュエータの振動体4の運動を、屈曲1次固有振動と合わせた駆動信号を一周期加えた過程について、詳細に述べる。振動体4は、図3に示す圧電アクチュエータに示す振動体4と同じ構成である。
【0022】
第一の入力電圧12と第二の入力電圧13の位相は、π/2radずらす。
また、図8に示すように電源を単一にして、第一の圧電体16と第二の圧電体17に対し、異なる位相を入力しても同等の効果が得られることは言うまでもない。
また、回転移動体5の代わりとして、スライダ等を用いてリニア型圧電アクチュエータとして用いることも可能である。
【0023】
まず、図4Aは、駆動信号が0radの場合を示す。
第一の入力電圧12は、正方向に最大となり、第一の圧電体16は、伸び歪みが最大となり、第一の振動部14は、移動体の移動方向と平行をなす方向に大きく屈曲する。
第二の入力電圧13は、0となるので、第二の振動部15は、第一の振動部16とともに、移動体の移動方向と平行をなす方向に移動する。
【0024】
そして、図4Bは、駆動信号がπ/2radの場合を示す。
第二の入力電圧13は、負方向に最大となり、第二の圧電体17は、縮み歪みが最大となり、第二の振動部15は、移動体の移動方向と鉛直をなす方向に大きく屈曲する。
第一の入力電圧12は、0となり、第一の振動部14は、初期状態に戻る。
【0025】
そして、図4Cは、駆動信号がπradの場合を示す。
第一の入力電圧12は、負方向に最大となり、第一の圧電体16は、縮み歪みが最大となり、第一の振動部14は、移動体の移動方向と平行をなす方向に大きく屈曲する。
第二の入力電圧13は、0となり、第二の振動部15は、初期状態に戻る。
【0026】
そして、図4Dは、駆動信号が3π/2radの場合を示す。
第二の入力電圧13は、正方向に最大となり、第二の圧電体17は、伸び歪みが最大となり、第二の振動部15は、移動体の移動方向と鉛直をなす方向に大きく屈曲する。
第一の入力電圧12は、0となり、第一の振動部14は、初期状態に戻る。
【0027】
以上により、屈曲1次固有振動数と合致した周波数の駆動信号を第一の圧電体16と第二の圧電体17に対して入力し、位相をずらすことにより、移動体(図示略す)の移動方向と平行をなす方向と移動体(図示略す)の移動方向と鉛直をなす方向の振動成分を合成し、楕円運動を描かせ、振動体4と移動体(図示略す)との摩擦により、移動体(図示略す)を一方向に移動させることが可能である。
【0028】
また、第一の圧電体16の分極方向を変えたり、第一の圧電体16への駆動信号の位相を変えること等により、移動体(図示略す)の移動方向を変えることが可能である。
また、第一の振動部14の屈曲1次固有振動数と第二の振動部15の屈曲2次固有振動数になるよう設計し、同一周波数を入力する等をして、移動体を駆動させることも可能である。
【0029】
図5は、実施の形態2に係る圧電アクチュエータを示す図である。
圧電アクチュエータは、振動体4と移動体8とローラー7からなる。
振動体4は、固定端18において、両端支持された第一の振動部14の央付近に支持部を有す、一端支持他端自由の第二の振動部15に取り付けられた第二の圧電体17と第一の振動部14に取り付けられた第一の圧電体16からなる。
【0030】
第二の圧電体17は、複数用い、第二の振動部15をバイモルフ形状とすることで、駆動力を増大させることが可能である。第一の振動部14と第二の振動部15は、支持部9によって、つながっている。
ここで、第一の圧電体16の分極方向は、第一の振動部14に対し、第一の圧電体16が貼り付けられている逆面から正電圧を加えた場合、縮み歪みを生じる向きで、その方向を−とする。同様に、第二の圧電体17のうち、一つは、分極方向として、第二の振動部15に対し、第二の圧電体17が貼り付けられている逆面から正電圧を加えた場合、伸び歪みを生じる向きで、その方向を+とする。
【0031】
また、もう一つの第二の圧電体17は、分極方向として、第二の振動部15に対し、第二の圧電体17が貼り付けられている逆面から正電圧を加えた場合、縮み歪みを生じる向きで、その方向を−とする。
また、第一の圧電体16は、第一の入力電圧12により、駆動信号を入力され、第二の圧電体17は、第二の入力電圧13により、駆動信号を入力される。
【0032】
また、第一の振動部14と第二の振動部15の屈曲1次固有振動数が等しくなるよう設計されている。第一の入力電圧12と第二の入力電圧13の位相はπ/2radずらす。
移動体8は、振動体4からの駆動力を得て、リニアに移動する。
ローラー7は、移動体4が円滑に移動させるためのものである。
【0033】
また、図8に示すように電源を単一にして、第一の圧電体16と第二の圧電体17に対し、異なる位相を入力しても同等の効果が得られることは言うまでもない。
また、移動体8の代わりに回転移動体等を用いて回転型アクチュエータとして用いることも可能である。
【0034】
図6は、実施の形態2に係る圧電アクチュエータの駆動方法を示す図である。そのうち、圧電アクチュエータの振動体4の運動を、屈曲1次固有振動と合わせた駆動信号を一周期加えた過程について、詳細に述べる。振動体4は、図5に示す圧電アクチュエータに示す振動体4と同じ構成である。
まず、図6Aは、駆動信号が0radの場合を示す。
【0035】
第一の入力電圧12は、負方向に最大となり、第一の圧電体16は、伸び歪みが最大となり、第一の振動部14は、移動体の移動方向と鉛直をなす方向に大きく屈曲する。
第二の入力電圧13は、0となるので、第二の振動部15は、第一の振動部14とともに、移動体の移動方向と鉛直をなす方向に移動する。
【0036】
そして、図6Bは、駆動信号がπ/2radの場合を示す。
第二の入力電圧13は、負方向に最大となり、第二の圧電体17のうち、+方向に分極された方は、縮み歪みを生じ、且つ第二の圧電体17のうち−方向に分極された方は、伸び歪みを生じるため、第二の振動部15は、移動体の移動方向と平行をなす方向に大きく屈曲する。
【0037】
第一の入力電圧12は、0となるので、第一の振動部14は、初期状態に戻る。
そして、図6Cは、駆動信号がπradの場合を示す。
第一の入力電圧12は、正方向に最大となり、第一の圧電体16は、縮み歪みが最大となり、第一の振動部14は、移動体の移動方向と鉛直をなす方向に大きく屈曲する。
【0038】
第二の入力電圧13は、0となるので、第二の振動部15は、初期状態に戻る。
そして、図6Dは、駆動信号が3π/2radの場合を示す。
第二の入力電圧13は、正方向に最大となり、第二の圧電体17のうち、+方向に分極された方は、伸び歪みを生じ、且つ第二の圧電体17のうち−方向に分極された方は、縮み歪みを生じるため、第二の振動部15は、移動体の移動方向と平行をなす方向に大きく屈曲する。
【0039】
第一の入力電圧12は、0となるので、第一の振動部14は、初期状態に戻る。
以上により、屈曲1次固有振動数と合致した周波数の駆動信号を第一の圧電体16と第二の圧電体17に対して入力することにより、移動体の移動方向と平行をなす方向と移動体の移動方向と鉛直をなす方向の振動成分を合成し、楕円運動を描かせ、振動体4と移動体8との摩擦により、移動体8を一方向に移動させることが可能である。
【0040】
また、第一の圧電体16の分極方向を変えたり、第一の圧電体16への駆動信号の位相を変えること等により、移動体8の移動方向を変えることが可能である。
また、第一の振動部14の屈曲1次固有振動数と第二の振動部15の屈曲2次固有振動数になるよう設計し、同一周波数を入力する等をして、移動体を駆動させることも可能である。
《実施の形態3》
図7は、実施の形態3に係る圧電アクチュエータを示す図である。
【0041】
圧電アクチュエータは、固定端18に両端支持された第一の振動部14と第二の振動部15、及び第一の振動部14に取り付けられた第一の圧電体16と第二の振動部15に取り付けられた第二の圧電体17からなる振動体4と、振動体4に接触し、駆動する回転移動体5と、振動体4と回転移動体5に対し、適当な圧力を供与する加圧材3からなる。振動体4は、複数いずれも、時計回りに円周同一方向に合わせ、同一平面上に配置する。
【0042】
それにより、回転移動体5を一方向に回転させ、その上、振動体4を複数用いているため、単数に比べて、回転移動体5への駆動力を増大させることが可能となる。
また、一つの振動体4の第一の圧電体16の分極方向を変えたり、入力位相を変える等により、回転移動体5の正逆転が可能である。
【0043】
同様に、振動体4の配置を、時計回りと反時計回りの組み合わせ、つまり、円周正逆方向になるよう、同一平面上に配置することにより、回転移動体5を正逆転することが可能である。
同様に、振動体4をマトリックス状に配置することにより、リニア型アクチュエータや、二次元駆動アクチュエータを構成することが可能である。
【0044】
【発明の効果】
以上により、本発明の圧電アクチュエータは、移動体の移動方向と平行の方向に大きな振動成分を持つ第一の振動部と、移動体の移動方向と鉛直をなす方向に、大きな振動成分を持つ第二の振動部により、振動体を構成することにより、移動体の移動方向と鉛直をなす方向のみならず、移動体の移動方向と同一の方向に対しても、安定した大きな出力を発生させることが可能となる。
【0045】
また、第一の振動部、及び第二の振動部形状を変えることにより、速度、駆動力に柔軟に対応したアクチュエータを作製することが可能である。
また、本発明の圧電アクチュエータは、移動体の移動方向との鉛直方向に大きな振動成分を持つ第一の振動部と、移動体の移動方向と平行をなす方向に、大きな振動成分を持つ第二の振動部により、振動体を構成することにより、上記の圧電アクチュエータと同様に、移動体の移動方向と鉛直をなす方向のみならず、移動体の移動方向と同一の方向に対しても、安定した大きな出力を発生させることが可能となる。
【0046】
また、第一の振動部、及び第二の振動部形状を変えることにより、速度、駆動力に柔軟に対応したアクチュエータを作製することが可能である。
本発明の圧電アクチュエータは、上記2つの圧電アクチュエ−タと同様の効果に加え、両端支持した第一の振動部と、一端支持他端自由の第二の振動部により、振動体を構成することにより、振動体を単純化し、小型化が可能となるため、圧電アクチュエータを小型化することが可能となる。また、設計も簡素化できる。
【0047】
また、本発明の圧電アクチュエータは、上記3つの圧電アクチュエータにおいて、第一の振動部の固有振動数と、第二の振動部の固有振動数を合わせることにより、振動体全体の振動を一定にし、駆動安定化することが可能となる。また、固有振動を利用することにより、入力に対する出力を増大させることが可能となり、高効率化が可能となる。
【0048】
また、本発明の圧電アクチュエータの駆動方法は、上記の圧電アクチュエータにおいて、振動体を構成する第一の振動部と第二の振動部の振動成分を合成し、振動体に楕円運動を生じさせ、移動体に対し、駆動力を与え、移動体を移動させることが可能となることを示している。その場合、圧電体への駆動信号は、第一の振動部と第二の振動部で相関がとれているため、所望の楕円運動方向を得ることが可能となる。
【0049】
また、本発明の圧電アクチュエータ及び圧電アクチュエータの駆動方法は、加圧材を設け、移動体が最大、または、所望の駆動力を得られるために必要な摩擦力を振動体と移動体に生じさせることが可能となる。
本発明の圧電アクチュエータ及び圧電アクチュエータの駆動方法は、上記に記載する5つの圧電アクチュエータの効果に加えて、複数振動体を用いることを特徴としている。それにより、移動体の駆動力を増加させることが可能であり、また、マトリックス状に配置し、リニア型圧電アクチュエータや2次元駆動圧電アクチュエータの実現が可能となる。
【図面の簡単な説明】
【図1】実施の形態1に係る圧電アクチュエータを示す図である。
【図2】振動片型圧電アクチュエータを示す概略図である。
【図3】実施の形態2に係る圧電アクチュエータを示す図である。
【図4】実施の形態2に係る圧電アクチュエータの駆動方法を示す図である。
【図5】実施の形態2に係る圧電アクチュエータを示す図である。
【図6】実施の形態2に係る圧電アクチュエータの駆動方法を示す図である。
【図7】実施の形態3に係る圧電アクチュエータを示す図である。
【図8】本発明に係る圧電アクチュエータの駆動方法を示すブロック図である。
【符号の説明】
1 振動片
2 圧電体
3 加圧材
4 振動体
5 回転移動体
6 ホーン
7 ローラー
8 移動体
9 支持部
12 第一の入力電圧
13 第二の入力電圧
14 第一の振動部
15 第二の振動部
16 第一の圧電体
17 第二の圧電体
18 固定端[0001]
BACKGROUND OF THE INVENTION
The present invention relates to a piezoelectric actuator used in a timepiece, a camera, a printer, an information storage device, and the like, and a driving method of the piezoelectric actuator, and more particularly to stabilization, high output, and high efficiency of the piezoelectric actuator.
[0002]
[Prior art]
Currently, OA equipment and information processing equipment are becoming more compact, and accordingly, piezoelectric actuators are attracting attention as a power source used for driving and transport. As an example of a conventional piezoelectric actuator, a vibrating piece type piezoelectric actuator is shown in FIG.
The vibrating piece type actuator is in contact with and vibrating the
[0003]
When a drive signal such as a sine wave is input at a frequency that causes the
[0004]
[Problems to be solved by the invention]
However, the conventional vibrating piece type piezoelectric actuator has an insufficient correlation between the stretching vibration of the
[0005]
Further, since the vibrating
Therefore, the present invention provides a desired drive direction and increases not only the vibration component in the direction perpendicular to the moving direction of the moving body but also the vibration component in the direction parallel to the moving direction of the moving body. An object of the present invention is to provide a piezoelectric actuator capable of generating a large driving force for a moving body.
[0006]
[Means for Solving the Problems]
The piezoelectric actuator according to the present invention is a piezoelectric actuator comprising a moving body and a vibrating body, wherein the vibrating body includes at least one first piezoelectric body and is parallel to the moving direction of the moving body, At least one second vibrator having at least one first vibration part having a large vibration component and at least one second piezoelectric body and having a large vibration component in a direction perpendicular to the moving direction of the moving body. The vibrating body has at least one fixed end and at least one free end.
[0007]
According to this, the first vibration unit having a large vibration component in a direction parallel to the moving direction of the moving body, and the second vibration component having a large vibration component in a direction perpendicular to the moving direction of the moving body. By configuring the vibrating body with the vibrating section, it is possible to generate a large output not only in the direction perpendicular to the moving direction of the moving body but also in the same direction as the moving direction of the moving body. .
[0008]
Further, by using at least one first piezoelectric body and at least one second piezoelectric body, it is possible to control the vibration directions of the first vibrating section and the second vibrating section. Further, by changing the shapes of the first vibration part and the second vibration part, it is possible to produce an actuator that flexibly corresponds to speed and driving force.
The piezoelectric actuator according to the present invention is a piezoelectric actuator comprising a moving body and a vibrating body, wherein the vibrating body includes at least one first piezoelectric body and is perpendicular to the moving direction of the moving body. In addition, at least one first vibration section having a large vibration component and at least one second piezoelectric body, and at least one having a large vibration component in a direction parallel to the moving direction of the moving body. It is comprised from the 2nd vibration part, and the said vibrating body has at least 1 fixed end and at least 1 free end, It is characterized by the above-mentioned.
[0009]
According to this, the same effect as the above piezoelectric actuator can be obtained.
Further, in the piezoelectric actuator according to the present invention, in the two piezoelectric actuators, the first vibrating portion of the vibrating body includes a both-end supporting elastic body,
The second vibrating section is a vibrating body made of a free elastic body with one end supported and a support section provided on the first vibrating section.
[0010]
According to this, in addition to the same effect as the two piezoelectric actuators described above, the vibrating body is constituted by the first vibrating portion supported at both ends and the second vibrating portion at one end supported and the other end freely, thereby forming the vibrating body. Thus, the piezoelectric actuator can be miniaturized and the piezoelectric actuator can be miniaturized.
The piezoelectric actuator according to the present invention is characterized in that, in the above three piezoelectric actuators, the natural frequency of the first vibration part and the natural frequency of the second vibration part are equal.
[0011]
According to this, in the three piezoelectric actuators described above, by combining the natural frequency of the first vibration part and the natural frequency of the second vibration part, the vibration of the entire vibration body is made constant and the drive is stabilized. It becomes possible. Further, by using the natural frequency, the vibrating body resonates, and high output and high efficiency can be achieved.
According to the piezoelectric actuator driving method of the present invention, in the piezoelectric actuator described above, the first and second piezoelectric bodies are driven at a frequency such that the first and second vibrating parts vibrate at a natural frequency. When a signal is input, a vibration component of the first vibration unit that is parallel to the moving direction of the moving body, and a vibration of the second vibrating unit that is perpendicular to the moving direction of the moving body. It is characterized by combining the components, causing an elliptical motion in the vibrating body, and moving the moving body.
[0012]
According to this, in the above-described piezoelectric actuator, the vibration components of the first vibrating body and the second vibrating body constituting the vibrating body are synthesized, and an elliptical motion is generated in the vibrating body. It is possible to give.
Further, the piezoelectric actuator and the driving method of the piezoelectric actuator according to the present invention are characterized in that, in each of the five piezoelectric actuators, a pressurizing material is provided that applies pressure to the moving body and the vibrating body.
[0013]
According to this, since it is possible to generate an appropriate frictional force between the vibrating body and the moving body by providing the pressing material, in addition to the gravity of the moving body, It becomes possible to obtain a force, and it becomes possible to achieve high output and stabilization of driving of the moving body.
In addition, the piezoelectric actuator and the driving method of the piezoelectric actuator according to the present invention are characterized in that a plurality of the vibrators are used in the six piezoelectric actuators.
[0014]
Thereby, in addition to the effects of the first two piezoelectric actuators described above, it is possible to increase the driving force of the moving body by arranging a plurality of vibrating bodies in the same direction. By arranging these in a matrix, a linear type or a two-dimensional drive actuator can be configured.
[0015]
DETAILED DESCRIPTION OF THE INVENTION
Hereinafter, the first embodiment to which the present invention is applied will be described in detail with reference to FIG.
FIG. 1 is a diagram illustrating a piezoelectric actuator according to the first embodiment.
The piezoelectric actuator is in contact with the vibrating
[0016]
By inputting a drive signal to the first
[0017]
As the first
Further, the first
<<
Hereinafter, the piezoelectric actuator and the driving method of the piezoelectric actuator will be described in detail in the second embodiment.
[0018]
FIG. 3 is a diagram illustrating the piezoelectric actuator according to the second embodiment.
The piezoelectric actuator includes a vibrating
The vibrating
[0019]
Here, the direction of polarization of the first
[0020]
The first
In addition, the
The first vibrating
[0021]
The
The
FIG. 4 is a diagram illustrating a driving method of the piezoelectric actuator according to the second embodiment. Among these, the process in which the movement of the vibrating
[0022]
The phases of the
Further, it goes without saying that the same effect can be obtained even if different phases are input to the first
Moreover, it is also possible to use it as a linear piezoelectric actuator using a slider or the like instead of the
[0023]
First, FIG. 4A shows a case where the drive signal is 0 rad.
The
Since the
[0024]
FIG. 4B shows a case where the drive signal is π / 2 rad.
The
The
[0025]
FIG. 4C shows a case where the drive signal is πrad.
The
The
[0026]
FIG. 4D shows the case where the drive signal is 3π / 2 rad.
The
The
[0027]
As described above, a driving signal having a frequency that matches the bending primary natural frequency is input to the first
[0028]
Further, the moving direction of the moving body (not shown) can be changed by changing the polarization direction of the first
Further, the
[0029]
FIG. 5 is a diagram illustrating the piezoelectric actuator according to the second embodiment.
The piezoelectric actuator includes a vibrating
The vibrating
[0030]
A plurality of the second
Here, the polarization direction of the first
[0031]
In addition, when the second
The first
[0032]
In addition, the
The moving
The
[0033]
Further, it goes without saying that the same effect can be obtained even if different phases are input to the first
Further, instead of the moving
[0034]
FIG. 6 is a diagram illustrating a driving method of the piezoelectric actuator according to the second embodiment. Among these, the process in which the movement of the vibrating
First, FIG. 6A shows a case where the drive signal is 0 rad.
[0035]
The
Since the
[0036]
FIG. 6B shows a case where the drive signal is π / 2 rad.
The
[0037]
Since the
FIG. 6C shows a case where the drive signal is πrad.
The
[0038]
Since the
FIG. 6D shows a case where the drive signal is 3π / 2 rad.
The
[0039]
Since the
As described above, when a drive signal having a frequency matching the bending primary natural frequency is input to the first
[0040]
Further, the moving direction of the moving
Further, the
<<
FIG. 7 is a diagram illustrating a piezoelectric actuator according to the third embodiment.
[0041]
The piezoelectric actuator includes a first vibrating
[0042]
Thereby, since the rotationally
Further, the rotating
[0043]
Similarly, by arranging the vibrating
Similarly, by arranging the vibrating
[0044]
【The invention's effect】
As described above, the piezoelectric actuator of the present invention has the first vibration part having a large vibration component in a direction parallel to the moving direction of the moving body and the first vibration portion having a large vibration component in a direction perpendicular to the moving direction of the moving body. By constructing a vibrating body with the two vibrating parts, a stable and large output can be generated not only in the direction perpendicular to the moving direction of the moving body but also in the same direction as the moving direction of the moving body. Is possible.
[0045]
Further, by changing the shapes of the first vibration part and the second vibration part, it is possible to produce an actuator that flexibly corresponds to speed and driving force.
The piezoelectric actuator of the present invention includes a first vibration part having a large vibration component in a direction perpendicular to the moving direction of the moving body, and a second vibration component having a large vibration component in a direction parallel to the moving direction of the moving body. By constructing a vibrating body with the vibrating part, it is stable not only in the direction perpendicular to the moving direction of the moving body but also in the same direction as the moving direction of the moving body, as in the piezoelectric actuator described above. Large output can be generated.
[0046]
Further, by changing the shapes of the first vibration part and the second vibration part, it is possible to produce an actuator that flexibly corresponds to speed and driving force.
In addition to the same effects as the two piezoelectric actuators described above, the piezoelectric actuator of the present invention comprises a vibrating body with a first vibrating portion supported at both ends and a second vibrating portion that is free at one end and supported at the other end. As a result, the vibrating body can be simplified and downsized, so that the piezoelectric actuator can be downsized. In addition, the design can be simplified.
[0047]
In the piezoelectric actuator of the present invention, in the above three piezoelectric actuators, by combining the natural frequency of the first vibration part and the natural frequency of the second vibration part, the vibration of the entire vibration body is made constant, The drive can be stabilized. In addition, by using the natural vibration, it is possible to increase the output with respect to the input, and it is possible to increase the efficiency.
[0048]
Further, in the piezoelectric actuator driving method of the present invention, in the above-described piezoelectric actuator, the vibration components of the first vibrating portion and the second vibrating portion constituting the vibrating body are synthesized, and an elliptical motion is generated in the vibrating body. It shows that it is possible to apply a driving force to the moving body to move the moving body. In this case, since the drive signal to the piezoelectric body is correlated between the first vibrating portion and the second vibrating portion, a desired elliptical motion direction can be obtained.
[0049]
In addition, the piezoelectric actuator and the piezoelectric actuator driving method of the present invention are provided with a pressurizing material, and the moving body generates a frictional force necessary for obtaining the maximum or desired driving force on the vibrating body and the moving body. It becomes possible.
In addition to the effects of the five piezoelectric actuators described above, the piezoelectric actuator and the piezoelectric actuator driving method of the present invention are characterized by using a plurality of vibrators. Thereby, it is possible to increase the driving force of the moving body, and it is possible to realize a linear piezoelectric actuator or a two-dimensional driving piezoelectric actuator by arranging in a matrix.
[Brief description of the drawings]
FIG. 1 is a diagram illustrating a piezoelectric actuator according to a first embodiment.
FIG. 2 is a schematic view showing a vibrating piece type piezoelectric actuator.
FIG. 3 is a diagram illustrating a piezoelectric actuator according to a second embodiment.
FIG. 4 is a diagram illustrating a method for driving a piezoelectric actuator according to a second embodiment.
FIG. 5 is a diagram showing a piezoelectric actuator according to a second embodiment.
6 is a diagram illustrating a driving method of a piezoelectric actuator according to a second embodiment. FIG.
7 is a diagram showing a piezoelectric actuator according to a third embodiment. FIG.
FIG. 8 is a block diagram showing a method for driving a piezoelectric actuator according to the present invention.
[Explanation of symbols]
DESCRIPTION OF
Claims (8)
前記振動体は、少なくとも一端が支持された第一の振動部と、該第一の振動部に一端が支持され他端が自由端とされた第二の振動部とから構成され、
前記第一の振動部は、前記移動体の移動方向に対して鉛直な側面に第一の圧電体を備え、前記移動体の移動方向と平行をなす方向に振動成分を持ち、
前記第二の振動部は、前記移動体の移動方向に対して平行な側面に第二の圧電体を備え、前記移動体の移動方向と鉛直をなす方向に振動成分を持ち、
前記第二の振動部の長手方向が前記移動体の移動方向と同方向となるように配置されて該移動体に接することを特徴とする圧電アクチュエータ。In a piezoelectric actuator consisting of a moving body and a vibrating body,
The vibrator is composed of a first vibrating part having at least one end supported, and a second vibrating part having one end supported by the first vibrating part and the other end being a free end,
The first vibration unit includes a first piezoelectric body on a side surface perpendicular to the moving direction of the moving body, and has a vibration component in a direction parallel to the moving direction of the moving body,
The second vibration unit includes a second piezoelectric body on a side surface parallel to the moving direction of the moving body, and has a vibration component in a direction perpendicular to the moving direction of the moving body,
A piezoelectric actuator, wherein the second vibrating section is arranged so that a longitudinal direction thereof is in the same direction as a moving direction of the moving body and is in contact with the moving body .
前記第一の圧電体及び第二の圧電体は、それぞれ蒸着により形成されているとともに一方向に分極されていることを特徴とする圧電アクチュエータ。 The piezoelectric actuator according to claim 1, wherein
The piezoelectric actuator, wherein the first piezoelectric body and the second piezoelectric body are each formed by vapor deposition and polarized in one direction .
前記第一の振動部の固有振動数と、前記第二の振動部の固有振動数が等しいことを特徴とする圧電アクチュエータ。 The piezoelectric actuator according to claim 1 or 2,
A piezoelectric actuator characterized in that the natural frequency of the first vibration part is equal to the natural frequency of the second vibration part .
前記移動体と前記振動体に対し、加圧力を供与する加圧材を備えたことを特徴とする圧電アクチュエータ。 The piezoelectric actuator according to any one of claims 1 to 3,
A piezoelectric actuator comprising a pressurizing material that applies pressure to the moving body and the vibrating body .
前記振動体を複数用いたことを特徴とする圧電アクチュエータ。 The piezoelectric actuator according to any one of claims 1 to 4,
A piezoelectric actuator using a plurality of the vibrators .
前記第一及び第二の圧電体に前記第一及び第二の振動部が固有振動数で振動するような周波数の駆動信号を入力し、 A drive signal having a frequency such that the first and second vibrating parts vibrate at a natural frequency are input to the first and second piezoelectric bodies,
前記第一の振動部の、前記移動体の移動方向と平行の方向をなす振動成分と、前記第二の振動部の、前記移動体の移動方向と鉛直の方向をなす振動成分とを合成し、 The vibration component of the first vibration unit that is parallel to the moving direction of the moving body and the vibration component of the second vibration unit that is perpendicular to the moving direction of the moving body are combined. ,
前記振動体に楕円運動を生じさせ、前記移動体を移動させることを特徴とする圧電アクチュエータの駆動方法。 A method of driving a piezoelectric actuator, wherein an elliptical motion is generated in the vibrating body to move the moving body.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP13566699A JP4005267B2 (en) | 1999-05-17 | 1999-05-17 | Piezoelectric actuator and driving method of piezoelectric actuator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP13566699A JP4005267B2 (en) | 1999-05-17 | 1999-05-17 | Piezoelectric actuator and driving method of piezoelectric actuator |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000324863A JP2000324863A (en) | 2000-11-24 |
| JP4005267B2 true JP4005267B2 (en) | 2007-11-07 |
Family
ID=15157106
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP13566699A Expired - Fee Related JP4005267B2 (en) | 1999-05-17 | 1999-05-17 | Piezoelectric actuator and driving method of piezoelectric actuator |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4005267B2 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1721346B1 (en) * | 2004-02-25 | 2007-10-17 | Nanomotion Ltd. | Multidirectional piezoelectric motor configuration |
| JP5071435B2 (en) | 2009-05-11 | 2012-11-14 | 株式会社ニコン | Piezoelectric actuator, lens barrel and camera |
| CN102804585A (en) * | 2009-06-15 | 2012-11-28 | 株式会社尼康 | Piezoelectric actuator, lens-barrel, and camera |
| JP2012080597A (en) * | 2010-09-30 | 2012-04-19 | Nikon Corp | Piezoelectric actuator, lens barrel, and imaging device |
-
1999
- 1999-05-17 JP JP13566699A patent/JP4005267B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000324863A (en) | 2000-11-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5200665A (en) | Ultrasonic actuator | |
| US5872417A (en) | Multiple degrees of freedom vibration actuator | |
| JPH1132491A (en) | Ultrasonic motor and electronic equipment with it | |
| KR20040027753A (en) | small piezoelectric or electrostrictive linear motor | |
| EP1721382A1 (en) | Small piezoelectric or electrostrictive linear motor | |
| JPH11127585A (en) | Ultrasonic motor and electronic equipment with the same | |
| JP4452275B2 (en) | Piezoelectric mechanical drive | |
| JPH08280185A (en) | Ultrasonic actuator | |
| JP2007325466A (en) | Driving apparatus | |
| JP4005267B2 (en) | Piezoelectric actuator and driving method of piezoelectric actuator | |
| JPH08182351A (en) | Ultrasonic actuator | |
| JP2004304963A (en) | Piezoelectric actuator | |
| JP3118252B2 (en) | Ultrasonic vibrating device and method, and driving device and method using the same | |
| JP3029677B2 (en) | Ultrasonic transducer, driving method thereof, and ultrasonic actuator | |
| KR20120138374A (en) | Piezoelectric vibrator of ultrasonic motor | |
| WO2007105489A1 (en) | Ultrasonic actuator | |
| KR100443639B1 (en) | small piezoelectric or electrostrictive linear motor | |
| JPH0223070A (en) | Linear type ultrasonic motor | |
| JP3917950B2 (en) | Communication terminal device | |
| JP2002101676A (en) | Actuator | |
| JP2667931B2 (en) | Multi-degree-of-freedom actuator | |
| JP2971971B2 (en) | Ultrasonic actuator | |
| JPH04281A (en) | Micro-slide device | |
| JP3200315B2 (en) | Vibration actuator | |
| JP2004312814A (en) | Operation device and electric apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20040302 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040514 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060711 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060911 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070320 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070518 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070821 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070823 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100831 Year of fee payment: 3 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20091108 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100831 Year of fee payment: 3 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: R3D03 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100831 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110831 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120831 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120831 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130831 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |