JP2019058032A - Electric actuator - Google Patents
Electric actuator Download PDFInfo
- Publication number
- JP2019058032A JP2019058032A JP2017182341A JP2017182341A JP2019058032A JP 2019058032 A JP2019058032 A JP 2019058032A JP 2017182341 A JP2017182341 A JP 2017182341A JP 2017182341 A JP2017182341 A JP 2017182341A JP 2019058032 A JP2019058032 A JP 2019058032A
- Authority
- JP
- Japan
- Prior art keywords
- input
- electric actuator
- motor unit
- reverse input
- reverse
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
- F16H25/24—Elements essential to such mechanisms, e.g. screws, nuts
- F16H25/2454—Brakes; Rotational locks
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transmission Devices (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Braking Arrangements (AREA)
Abstract
Description
本発明は、電動アクチュエータに関する。 The present invention relates to an electric actuator.
近年、車両等の省力化、低燃費化のために電動化が進み、例えば、自動車の自動変速機やブレーキ、ステアリング等の操作を電動機の力で行うシステムが開発され、市場に投入されている。このような用途に使用されるアクチュエータとして、電動機の回転運動を直線方向の運動に変換するボールねじ機構を用いた電動リニアアクチュエータが知られている(特許文献1、2参照)。
In recent years, electrification has progressed to save power and reduce fuel consumption of vehicles, etc., for example, a system for operating an automatic transmission, brakes, steering, etc. of an automobile with the power of an electric motor has been developed and put on the market. . As an actuator used for such an application, an electric linear actuator using a ball screw mechanism that converts a rotary motion of an electric motor into a linear motion is known (see
ボールねじ機構は、モータからの回転運動を直線運動に変換して伝達する際の動力伝達効率(正効率)が非常に良いといった長所がある。しかしながら、逆効率、すなわち直線運動を回転運動に変換して伝達する際の動力伝達効率も良いため、ボールねじ機構を用いた電動アクチュエータにおいては、操作対象側(出力側)からボールねじ機構に直線運動方向の負荷が加わると、ボールねじ機構が回転し、出力軸(ボールねじ軸)の制動状態を維持しにくいといった短所がある。 The ball screw mechanism has an advantage that the power transmission efficiency (positive efficiency) when the rotary motion from the motor is converted into a linear motion and transmitted is very good. However, since the reverse efficiency, that is, the power transmission efficiency when converting linear motion into rotational motion is also good, in an electric actuator using a ball screw mechanism, a straight line from the operation target side (output side) to the ball screw mechanism. When a load in the movement direction is applied, the ball screw mechanism rotates, and it is difficult to maintain the braking state of the output shaft (ball screw shaft).
これに対して、すべりねじ機構は、一般的にボールねじ機構に比べて正効率及び逆効率が、共に低い特徴がある。特に、ねじ部のリード角を小さくした場合(例えば、リード角が0〜5°の場合)は、逆効率が0%、すなわち出力側からの逆入力があっても回転しないセルフロック機能が働く。従って、このような性質のすべりねじ機構を電動アクチュエータに用いることで、逆入力に対する制動力を高めることができる。 On the other hand, the slide screw mechanism has a feature that both the normal efficiency and the reverse efficiency are generally lower than those of the ball screw mechanism. In particular, when the lead angle of the thread portion is reduced (for example, when the lead angle is 0 to 5 °), the reverse efficiency is 0%, that is, the self-locking function that does not rotate even if there is reverse input from the output side works. . Therefore, by using the sliding screw mechanism having such a property for the electric actuator, the braking force against the reverse input can be increased.
しかしながら、エンジンや走行中の車体などで発生する振動がすべりねじ機構に伝達されると、その振動によってすべりねじ機構のナットが徐々に逆回転し、高い制動力を維持することができない場合があった。 However, if vibrations generated by the engine, the vehicle body during travel, etc. are transmitted to the sliding screw mechanism, the nuts of the sliding screw mechanism may gradually reversely rotate due to the vibrations, and it may not be possible to maintain a high braking force. It was.
そこで、本発明は、振動が生じる箇所でも高い制動力を発揮できる電動アクチュエータを提供することを目的とする。 Accordingly, an object of the present invention is to provide an electric actuator that can exhibit a high braking force even in a place where vibration occurs.
上記課題を解決するため、本発明は、モータ部と、モータ部の回転運動を直線運動に変換する運動変換機構とを備える電動アクチュエータにおいて、運動変換機構を、ねじ軸とこれに螺合するナットとを有するすべりねじ機構で構成し、モータ部とは反対の出力側からの逆入力に対してすべりねじ機構の正逆両方向の回転を防止する逆入力遮断クラッチを設けたことを特徴とする。 In order to solve the above-described problems, the present invention provides an electric actuator including a motor unit and a motion conversion mechanism that converts a rotational motion of the motor unit into a linear motion, and the motion conversion mechanism includes a screw shaft and a nut that is screwed to the screw shaft. And a reverse input shut-off clutch that prevents the sliding screw mechanism from rotating in both forward and reverse directions against reverse input from the output side opposite to the motor unit.
このように、本発明に係る電動アクチュエータにおいては、運動変換機構としてボールねじ機構よりも逆入力に対する制動力の高いすべりねじ機構を用い、さらに、逆入力遮断クラッチを備えていることで、モータ部に対する通電が止められた状態(停止時)であっても、出力側からの逆入力に対するすべりねじ機構の回転を高度に防止できるようになる。しかも、逆入力遮断クラッチは、逆入力に対する一方向の回転だけではなく正逆両方向の回転を防止するので、電動アクチュエータに振動が伝達されたとしても、逆入力遮断クラッチによるロック状態(すべりねじ機構の回転防止状態)を確実に保持することができる。これにより、再始動する際にすべりねじ機構の位置を保持することができ、正確な位置制御が可能な電動アクチュエータを提供することができる。 As described above, the electric actuator according to the present invention uses a sliding screw mechanism having a higher braking force with respect to reverse input than the ball screw mechanism as the motion conversion mechanism, and further includes a reverse input cutoff clutch. Even when the energization is stopped (when stopped), the sliding screw mechanism can be highly prevented from rotating with respect to the reverse input from the output side. In addition, the reverse input cutoff clutch prevents not only rotation in one direction but also rotation in both forward and reverse directions with respect to the reverse input. Therefore, even if vibration is transmitted to the electric actuator, the reverse input cutoff clutch is locked (sliding screw mechanism). The rotation prevention state) can be reliably maintained. Thereby, the position of the slide screw mechanism can be maintained when restarting, and an electric actuator capable of accurate position control can be provided.
逆入力遮断クラッチとしては、モータ部からの入力によって回転する入力部材と、入力部材の回転に伴って回転してその回転力をすべりねじ機構へ出力する出力部材と、回転しないように固定された静止部材と、モータ部から入力される駆動時に、回転する入力部材によって静止部材と出力部材とに対する係合が解除されて出力部材の回転を許容し、モータ部から入力されない停止時に、静止部材と出力部材とに係合して出力部材の正逆両方向の回転を防止するロック部材とを有するものを採用することができる。 As the reverse input cutoff clutch, an input member that is rotated by input from the motor unit, an output member that rotates with the rotation of the input member and outputs the rotational force to the sliding screw mechanism, and is fixed so as not to rotate. When the drive is input from the motor unit, the stationary input member is disengaged from the stationary member and the output member by the rotating input member to allow the output member to rotate. It is possible to employ one having a lock member that engages with the output member and prevents the output member from rotating in both forward and reverse directions.
また、モータ部の回転運動を減速して伝達する減速機を備える場合は、逆入力遮断クラッチを、減速機よりも出力側に配置することが好ましい。 Moreover, when providing the reduction gear which decelerates and transmits the rotational motion of a motor part, it is preferable to arrange | position a reverse input interruption | blocking clutch on the output side rather than a reduction gear.
逆入力遮断クラッチにおいて、ロック部材の係合状態(ロック状態)が解除された際に、逆入力を受けて出力部材が入力部材と同方向にかつ入力部材よりも速く回転すると、ロック部材が再び出力部材と静止部材との間で係合する「追いつきロック」と称される現象が発生する場合がある。このとき、ロック部材の係合とその解除が繰り返し行われることで異音(振動)が発生する。しかしながら、上記のように、逆入力遮断クラッチを減速機よりも出力側に配置することで、反対に逆入力遮断クラッチを減速機よりも入力側に配置する構成に比べて、逆入力遮断クラッチの入力部材と出力部材との回転速度差を小さくすることができ、追いつきロックが発生した場合の異音(振動)を低減できるようになる。 In the reverse input cutoff clutch, when the engagement state (locked state) of the lock member is released, if the output member receives the reverse input and rotates in the same direction as the input member and faster than the input member, the lock member again A phenomenon called “catch-up lock” that engages between the output member and the stationary member may occur. At this time, abnormal noise (vibration) is generated by repeatedly engaging and releasing the lock member. However, as described above, the reverse input cut-off clutch is arranged on the output side of the speed reducer, so that the reverse input cut-off clutch of the reverse input cut-off clutch is conversely arranged on the input side of the speed reducer. The difference in rotational speed between the input member and the output member can be reduced, and abnormal noise (vibration) when a catch-up lock occurs can be reduced.
出力部材とすべりねじ機構のナットとを一体成型してもよい。 The output member and the nut of the sliding screw mechanism may be integrally formed.
このように、出力部材とナットとを一体成型することで、これらの組付け作業が不要となり、製造コストの低減を図れる。 Thus, by integrally molding the output member and the nut, these assembling operations become unnecessary, and the manufacturing cost can be reduced.
すべりねじ機構のねじ軸とナットの少なくとも一方のねじ溝の表面を、摺動性樹脂で被覆して、すべりねじ機構の動力伝達効率を向上させてもよい。 The surface of at least one of the threaded shaft of the sliding screw mechanism and the nut may be coated with a slidable resin to improve the power transmission efficiency of the sliding screw mechanism.
また、すべりねじ機構のねじ軸を、モータ部と逆入力遮断クラッチとの内径側に配置することで、これらの内径側空間をねじ軸の配置スペースとして利用し、電動アクチュエータの軸方向寸法の小型化を図りつつ、ねじ軸の軸方向の最大移動距離を長く確保することができる。 In addition, by arranging the screw shaft of the sliding screw mechanism on the inner diameter side of the motor unit and the reverse input shut-off clutch, the inner diameter side space is used as the screw shaft arrangement space, and the axial dimension of the electric actuator is small. It is possible to ensure a long maximum movement distance in the axial direction of the screw shaft while achieving a reduction in size.
本発明によれば、振動が生じる箇所で用いられても逆入力に対する制動力の高い電動アクチュエータを提供することができる。 According to the present invention, it is possible to provide an electric actuator having a high braking force against reverse input even when used in a place where vibration occurs.
以下、添付の図面に基づき、本発明について説明する。なお、本発明を説明するための各図面において、同一の機能もしくは形状を有する部材や構成部品等の構成要素については、判別が可能な限り同一符号を付すことにより一度説明した後ではその説明を省略する。 Hereinafter, the present invention will be described with reference to the accompanying drawings. In the drawings for explaining the present invention, components such as members and components having the same function or shape are denoted by the same reference numerals as much as possible, and once described, the description will be given. Omitted.
図1は、本発明の実施の一形態に係る電動アクチュエータの縦断面図である。 FIG. 1 is a longitudinal sectional view of an electric actuator according to an embodiment of the present invention.
図1に示す電動アクチュエータ1は、モータ部2と、モータ部2の回転運動を直線運動に変換する運動変換機構としてのすべりねじ機構3と、モータ部2とは反対の出力側からの逆入力トルクを遮断する逆入力遮断クラッチ4とを主な構成としている。
An
モータ部2は、ステータ5とロータ6とからなる電動モータと、電動モータを収容するモータケース7とを備える。モータケース7は、組み立ての都合上、二分割されており、ステータ5及びロータ6の主要部分を収容する筒状のケース本体部8と、ケース本体部8の一端部(図1における右端部)の開口部を閉鎖するケース蓋部9とで構成されている。ケース蓋部9には、ステータ5やセンサ等に動力線あるいは信号線を接続するためのコネクタ部10が設けられている。
The
ステータ5は、ケース本体部8の内周面に回転しないように固定されており、軸方向に積層した複数の電磁鋼板で形成されたステータコア5aと、ステータコア5aに装着された絶縁材料からなるボビン5bと、ボビン5bに巻回されたステータコイル5cとで構成されている。
The
ロータ6は、ステータ5の径方向内側に隙間を介して対向するように配置されており、環状のロータコア6aと、ロータコア6aの外周面に取り付けられた複数のマグネット6bと、ロータコア6aの内周面に固定された環状のロータインナ6cとで構成されている。ロータコア6aは、例えば軸方向に積層した複数の電磁鋼板で形成される。ロータインナ6cの軸方向長さはロータコア6aの軸方向長さよりも長く、ロータコア6aの軸方向両側にロータインナ6cが突出している。この軸方向両側に突出するロータインナ6cの両端部の外周面にはそれぞれ軸受11,12が装着されている。本実施形態では、一方(図1において左側)の軸受11が、ロータインナ6cの軸方向一端部とケース本体部8との間に配置され、他方(図1において右側)の軸受12が、ロータインナ6cの軸方向他端部とケース蓋部9との間に配置されている。このように、ロータインナ6cとモータケース7との間に介在する各軸受11,12によって、ロータインナ6cはモータケース7に対して回転可能に支持されている。
The
逆入力遮断クラッチ4は、モータケース7とは別の筒状のクラッチケース13内に収容されている。また、クラッチケース13の内周側には、2つの軸受16,17が収容されており、これらの軸受16,17によってすべりねじ機構3が支持されている。クラッチケース13とモータケース7(ケース本体部8及びケース蓋部9)は、それぞれボルト等の締結手段を用いて一体的に固定されている。
The reverse
すべりねじ機構3は、外周面にねじ溝が形成されたねじ軸14と、ねじ軸14に対して螺合するねじ溝を内周面に有する円筒状のナット15とで構成されている。ねじ軸14及びナット15は、ロータインナ6cと同軸上に配置されている。ナット15は、その外周面とクラッチケース13の内周面との間に配置された2つの軸受16,17によって回転可能に支持されている。これに対して、ねじ軸14は、図示しない回り止め手段によって回転しないように規制されており、ナット15が回転することで軸方向に進退する。ねじ軸14の先端部(図1における左端部)には、操作対象である図示しない使用機器の対応部位と連結するための孔部(連結部)14aが設けられており、ねじ軸14が軸方向に進退することで使用機器が操作される。また、本実施形態では、図1に示すように、少なくともねじ軸14が最大限に後退した状態で、ねじ軸14はモータ部2と逆入力遮断クラッチ4との内径側に配置される。このようにすることで、モータ部2と逆入力遮断クラッチ4との内径側空間をねじ軸14の収容スペースとして利用でき、電動アクチュエータの軸方向寸法の小型化を図りつつ、ねじ軸の軸方向の最大移動距離を長く確保することが可能となる。
The sliding
また、ねじ軸14の先端部側には、電動アクチュエータ1内に埃等の異物や水が侵入するのを防止するブーツ18が装着されている。ブーツ18は、小径端部18aと大径端部18bとこれらを繋いで軸方向に伸縮する蛇腹部18cとで構成され、小径端部18aがねじ軸14の外周面に固定され、大径端部18bがクラッチケース13の外周面に固定されている。
In addition, a
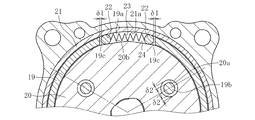
ここで、図2は、図1のA−A線で矢視した逆入力遮断クラッチ4の縦断面図である。
以下、図1及び図2を参照しつつ逆入力遮断クラッチ4の構成について説明する。
Here, FIG. 2 is a longitudinal cross-sectional view of the reverse
Hereinafter, the configuration of the reverse
逆入力遮断クラッチ4は、入力部材19と、出力部材20と、静止部材としての外輪21と、ロック部材としてのローラ22とを備える。
The reverse
入力部材19は、ロータインナ6cの端部外周面に固定され、ロータインナ6cと一体的に回転するように構成されている。入力部材19の外周側には、複数のポケット19a(図2参照)が形成されており、各ポケット19aにはローラ22が2つずつ収容されている。また、各ポケット19a内の一対のローラ22の間には、ばね部材23が収容されている。一対のローラ22は、ばね部材23によって互いに周方向に離反するように押圧されている。
The
出力部材20は、すべりねじ機構3のナット15の外周面に一体に設けられている。このように、出力部材20とナット15とを一体成型することで、これらの組付け作業が不要となる。なお、出力部材20とナット15とを別体で構成しても構わない。出力部材20には、複数の孔部20aが形成されており、各孔部20aには入力部材19に設けられた軸方向に突出する凸部19bが挿入されている。モータ部2からの入力によって入力部材19が回転すると、凸部19bが孔部20aの縁に接触することにより出力部材20に回転が伝達される。なお、本実施形態とは反対に、凸部を出力部材20に設け、孔部を入力部材19に形成してもよい。また、孔部20aは、図1に示すような貫通孔のほか、底部を有する孔(凹部)であってもよい。
The
出力部材20の外周面は、入力部材19のポケット19aが設けられた部分の内周面と対向するように配置されている。出力部材20の外周面のうち、各ポケット19aに対応する部分には、2つの平面を突き合わせた凸状のクラッチ面(カム面)20bが形成されている。
The outer peripheral surface of the
外輪21は、円筒状に形成され、クラッチケース13の内周面に回転しないように固定されている。外輪21の内周面21aと出力部材20のクラッチ面20bとの間には、周方向(回転方向)の両端側でローラ22の直径よりも幅が小さくなる楔状隙間24が形成され、この楔状隙間24内にローラ22が収容されている。
The
上記逆入力遮断クラッチ4の構成をまとめると下記の通りである。
すなわち、逆入力遮断クラッチ4は、モータ部2のロータインナ6cと一体的に回転するように構成された入力部材19と、すべりねじ機構3のナット15と一体的に回転するように構成された出力部材20と、入力部材19と出力部材20の一方に設けられた孔部と、この孔部の縁に接触することにより入力部材19から出力部材20へ回転を伝達するように入力部材19と出力部材20の他方に設けられた凸部と、回転しないように固定された静止部材としての外輪21と、入力部材19に設けられたポケット19aと、ポケット19aに対応する部分で出力部材20の外周面に設けられたクラッチ面(カム面)20bと、外輪21の内周面21aと出力部材20のクラッチ面20bとの間に周方向の両端側で幅が小さくなるように形成された楔状隙間24と、楔状隙間24内に収容されたロック部材としての一対のローラ22と、一対のローラ22を互いに周方向に離反するように押圧するばね部材23とを有する。
The configuration of the reverse
That is, the reverse
続いて、上記逆入力遮断クラッチ4の機能を中心に、本実施形態に係る電動アクチュエータの動作について説明する。
Subsequently, the operation of the electric actuator according to the present embodiment will be described focusing on the function of the reverse
まず、図3に示す状態は、モータ部が駆動していない停止状態である。この状態では、一対のローラ22は、ばね部材23によってそれぞれ楔状隙間24の縮小方向に押圧され、出力部材20のクラッチ面20bと外輪21の内周面21aの双方に係合して出力部材20の回転を阻止するロック状態にある。また、この状態では、入力部材19のポケット19aを構成する孔面19cと各ローラ22との間に回転方向隙間δ1が存在する。この回転方向隙間δ1は、入力部材19の凸部19bと出力部材20の孔部20aとの間の回転方向隙間δ2よりも小さく設定されている(δ1<δ2)。
First, the state shown in FIG. 3 is a stopped state in which the motor unit is not driven. In this state, the pair of
上記停止状態からモータ部が駆動を開始し、ロータインナが回転すると、これと一体的に入力部材19が回転する。例えば、図4に示すように、入力部材19が図の時計方向に回転し始めると、回転方向隙間が上記のように(δ1<δ2に)設定されているため、まず、入力部材19の孔面19cが回転方向後方のローラ22に接触する。このとき、入力部材19の凸部19bは、出力部材20の孔部20aの孔面に対しては接触していない。そして、回転方向後方のローラ22が、入力部材19の孔面19cによって時計方向に押され、ばね部材23の弾性力に抗して楔状隙間24内で移動すると、出力部材20と外輪21とに対する回転方向後方のローラ22の係合(ロック状態)が解除される。なお、回転方向前方のローラ22は、時計方向への回転に対するロックには寄与していない。これにより、出力部材20は時計方向の回転が許容された状態となる。
When the motor unit starts driving from the stopped state and the rotor inner rotates, the
そして、図5に示すように、入力部材19がさらに時計方向に回転すると、入力部材19の凸部19bが出力部材20の孔部20aの孔面に対して接触する。これにより、入力部材19から時計方向の入力トルクが出力部材20に伝達され、出力部材20が時計方向に回転する。
As shown in FIG. 5, when the
このように、入力部材19の回転に伴って出力部材20が回転すると、出力部材20と一体成型されたすべりねじ機構3のナット15(図1参照)が回転し、ねじ軸14が軸方向の一方(前進方向又は後退方向)へ移動する。反対に、図3に示す停止状態から、入力部材19が反時計方向に回転した場合は、上記とは逆の動作で出力部材20が反時計方向に回転し、これに伴って、ねじ軸14が軸方向の他方へ移動する。その後、モータ部からの入力がなくなって駆動が停止すると、ばね部材23の弾性力によって一対のローラ22が出力部材20のクラッチ面20bと外輪21の内周面21aとに対して係合するロック状態に戻される。
Thus, when the
ここで、図3に示すロック状態において、操作対象側(出力側)からすべりねじ機構のねじ軸に対して直線運動方向の逆入力が作用した場合、その逆入力は、ねじ軸、ナットを順に介して逆入力遮断クラッチの出力部材に伝達される。しかしながら、このとき、出力部材はロック状態にあるので、逆入力による出力部材の回転は防止される。具体的に、図3において、出力部材20に対して時計方向の逆入力トルクが作用した場合は、時計方向後方のローラ22が出力部材20と外輪21とに対して係合していることで、出力部材20の時計方向の回転が防止される。反対に、出力部材20に対して反時計方向の逆入力が作用した場合は、反時計方向後方のローラ22が出力部材20と外輪21とに対して係合していることで、出力部材20の反時計方向の回転が防止される。このように、ロック状態では、逆入力に対して出力部材の正逆両方向の回転が防止されるので、出力部材と一体のすべりねじ機構のナットの正逆両方向の回転も防止される。これにより、ねじ軸を所定の軸方向位置に保持しておくことができる。
Here, in the locked state shown in FIG. 3, when reverse input in the linear motion direction acts on the screw shaft of the sliding screw mechanism from the operation target side (output side), the reverse input is performed in the order of the screw shaft and nut. To the output member of the reverse input cutoff clutch. However, at this time, since the output member is in a locked state, rotation of the output member due to reverse input is prevented. Specifically, in FIG. 3, when a clockwise reverse input torque is applied to the
続いて、本発明の電動アクチュエータの他の実施形態について、上記実施形態とは異なる部分を中心に説明する。なお、以下に説明する実施形態において、上記実施形態と基本的に同様の機能あるいは形状の部材については、同一の符号を付すことによりその説明を省略する。 Subsequently, another embodiment of the electric actuator according to the present invention will be described focusing on portions different from the above embodiment. In the embodiment described below, members having the same function or shape as those of the above embodiment are denoted by the same reference numerals, and the description thereof is omitted.
図6は、本発明の他の実施形態に係る電動アクチュエータの縦断面図である。 FIG. 6 is a longitudinal sectional view of an electric actuator according to another embodiment of the present invention.
図6に示す電動アクチュエータ1は、モータ部2と逆入力遮断クラッチ4との間に減速機26を備えている。減速機26は、筒状の減速機ケース25内に収容されており、減速機ケース25は、モータケース7とクラッチケース13との間でボルト等の締結手段を用いてこれらのケース7,13と一体的に固定されている。
The
図7は、図6のB−B線で矢視した減速機26の縦断面図である。
以下、図6及び図7を参照しつつ減速機26の構成及び動作について詳しく説明する。
FIG. 7 is a longitudinal cross-sectional view of the
Hereinafter, the configuration and operation of the
減速機26は、入力回転体としての太陽ギヤ27と、太陽ギヤ27の外周に配置された軌道リングとしてのリングギヤ28と、太陽ギヤ27とリングギヤ28との間に回転可能に配置された遊星回転体しての複数の遊星ギヤ29と、各遊星ギヤ29を保持する出力回転体としてのキャリア30とを有する、遊星ギヤ減速機である。
The
太陽ギヤ27は、ロータインナ6cの外周面に対して同軸上に固定され、ロータインナ6cと一体的に回転する。各遊星ギヤ29は、太陽ギヤ27とリングギヤ28との間に配置され、これらと噛み合うように組み付けられている。また、各遊星ギヤ29は、キャリア30に設けられた支軸31に対して軸受32を介して回転可能に取り付けられている。キャリア30は、逆入力遮断クラッチ4の入力部材19の内周面に挿入されて固定されており、入力部材19と一体的に回転する。
The
上記のような減速機26を備える電動アクチュエータ1において、モータ部2が駆動を開始し、ロータインナ6cが回転すると、これと一体的に減速機26の太陽ギヤ27が回転する。そして、太陽ギヤ27が回転することにより、複数の遊星ギヤ29が自転しながらリングギヤ28に沿って公転し、この遊星ギヤ29の公転に伴ってキャリア30が回転する。これにより、モータ部2の回転が減速されて逆入力遮断クラッチ4の入力部材19へ伝達される。
In the
逆入力遮断クラッチへの入力後の動作については、上記実施形態での動作と同様であるので説明を省略する。従って、本実施形態においても、モータ部から入力される駆動時は、逆入力遮断クラッチのロック状態が解除されて、出力部材の回転が許容される。これに対して、モータ部から入力されない停止時は、逆入力遮断クラッチがロック状態となっていることで、出力側から逆入力が作用したとしても、逆入力に対するすべりねじ機構のナットの正逆両方向の回転が防止される。 Since the operation after input to the reverse input cutoff clutch is the same as the operation in the above embodiment, the description thereof is omitted. Therefore, also in the present embodiment, during driving input from the motor unit, the locked state of the reverse input cutoff clutch is released, and the rotation of the output member is allowed. On the other hand, when the input is not input from the motor unit, the reverse input shut-off clutch is in the locked state, so that even if reverse input is applied from the output side, the forward and reverse of the nut of the slide screw mechanism against the reverse input Bi-directional rotation is prevented.
また、本実施形態では、図6に示すように、少なくともねじ軸14が最大限に後退した状態で、ねじ軸14はモータ部2と減速機26と逆入力遮断クラッチ4との内径側に配置される。このようにすることで、モータ部2と減速機26と逆入力遮断クラッチ4との内径側空間をねじ軸14の収容スペースとして利用でき、上記実施形態と同様に、電動アクチュエータの軸方向寸法の小型化を図りつつ、ねじ軸の軸方向の最大移動距離を長く確保することができる。
In the present embodiment, as shown in FIG. 6, the
以上のように、本発明の各実施形態に係る電動アクチュエータにおいては、運動変換機構としてボールねじ機構よりも逆入力に対する制動力の高いすべりねじ機構を用い、さらに、逆入力遮断クラッチを備えていることで、モータ部に対する通電が止められた状態(停止時)であっても、逆入力に対するすべりねじ機構の回転を高度に防止できるようになる。しかも、逆入力遮断クラッチは、逆入力に対する一方向の回転だけではなく正逆両方向の回転を防止するので、電動アクチュエータに振動が伝達されたとしても、逆入力遮断クラッチによるロック状態を確実に保持することができる。このように、本発明に係る電動アクチュエータは、振動が生じる箇所で用いられても逆入力に対して高い制動力を発揮することができるので、例えば、二輪車を含む自動車用の電動パーキングブレーキ機構や、車高調整装置などに好適である。 As described above, the electric actuator according to each embodiment of the present invention uses a sliding screw mechanism having a higher braking force against reverse input than the ball screw mechanism as a motion conversion mechanism, and further includes a reverse input cutoff clutch. As a result, even when the energization of the motor unit is stopped (when stopped), the sliding screw mechanism can be highly prevented from rotating with respect to the reverse input. In addition, the reverse input cutoff clutch prevents not only rotation in one direction but also forward and reverse rotation with respect to the reverse input, so even if vibration is transmitted to the electric actuator, the locked state by the reverse input cutoff clutch is reliably maintained. can do. As described above, since the electric actuator according to the present invention can exhibit a high braking force against reverse input even when used in a place where vibration occurs, for example, an electric parking brake mechanism for an automobile including a motorcycle, It is suitable for a vehicle height adjusting device.
一方で、本発明に係る電動アクチュエータは、動力伝達効率の良くないすべりねじ機構を用いているので、ボールねじ機構を用いた電動アクチュエータに比べて、モータ部からの動力伝達効率(正効率)が低下する傾向にある。そのため、すべりねじ機構自体の逆入力防止機能は多少低下するが、動力伝達効率(正効率)を向上させるために、ねじ軸とナットの少なくとも一方のねじ溝の表面にPTFE等を焼き付けるなどして、ねじ溝の表面を摩擦係数の低い摺動性樹脂で被覆してもよい。 On the other hand, since the electric actuator according to the present invention uses a sliding screw mechanism with poor power transmission efficiency, the power transmission efficiency (positive efficiency) from the motor unit is higher than that of an electric actuator using a ball screw mechanism. It tends to decrease. Therefore, although the reverse input prevention function of the slide screw mechanism itself is somewhat lowered, in order to improve power transmission efficiency (normal efficiency), PTFE or the like is baked on the surface of at least one thread groove of the screw shaft and nut. The surface of the thread groove may be covered with a slidable resin having a low friction coefficient.
また、図6に示す電動アクチュエータのように、減速機を備える構成においては、逆入力遮断クラッチを減速機よりも出力側に配置し、減速機によって減速された回転運動を逆入力遮断クラッチに入力するように構成することで、「追いつきロック」と称される現象での異音(振動)を低減することができる。「追いつきロック」とは、電動アクチュエータに対して出力側からの逆入力(反力)が作用している状態で、逆入力遮断クラッチのロック状態が解除された際に(図4に示す状態となったときに)、逆入力を受けて出力部材20が入力部材19と同方向にかつ入力部材19よりも速く回転することで、ローラ22に出力部材20が追いつき、ローラ22が再び出力部材20と外輪21との間で係合してロック状態となる現象のことである。その後、ローラ22は、回転し続ける入力部材19によって押し出されてロックが解除されるが、これに伴って出力部材20が回転し始めることで再びロック状態となる、という動作を繰り返す。これにより、逆入力遮断クラッチにおける異音(振動)が発生する。
Further, in a configuration including a speed reducer such as the electric actuator shown in FIG. 6, the reverse input cutoff clutch is arranged on the output side of the speed reducer, and the rotational motion decelerated by the speed reducer is input to the reverse input cutoff clutch. By configuring so, abnormal noise (vibration) in a phenomenon called “catch-up lock” can be reduced. “Catch-up lock” is a state in which a reverse input (reaction force) from the output side is acting on the electric actuator, and when the reverse input cutoff clutch is unlocked (the state shown in FIG. 4). When the
そこで、図6に示す実施形態では、減速機によって減速された回転運動を逆入力遮断クラッチに入力するように構成することで、逆入力遮断クラッチにおける入力部材の回転と出力部材の回転との速度差を小さくし、追いつきロックが生じた際の異音(振動)を低減できるようにしている。例えば、図8(a)に示すように、逆入力遮断クラッチを減速機よりも出力側に配置した構成において、モータ部からの入力回転数が2000rpm、出力側からの逆入力回転数が500rpmであって、減速機によって入力回転が1/10に減速される場合、モータ部からの入力回転(2000rpm)は1/10の200rpmに減速されて逆入力遮断クラッチに入力されるので、逆入力遮断クラッチにおける入力回転(200rpm)と逆入力回転(500rpm)との速度差は300rpmとなる。これに対して、図8(b)に示すように、逆入力遮断クラッチを減速機よりも入力側に配置した場合は、モータ部からの入力回転(2000rpm)が減速されずに逆入力遮断クラッチに入力され、さらに、出力側からの逆入力回転(500rpm)が減速機を介することで10倍の5000rpmに増速されて逆入力遮断クラッチに入力されるので、逆入力遮断クラッチにおける入力回転(2000rpm)と逆入力回転(5000rpm)との速度差は3000rpmとなる。 Therefore, in the embodiment shown in FIG. 6, the rotational motion decelerated by the speed reducer is input to the reverse input cutoff clutch, whereby the speed between the rotation of the input member and the rotation of the output member in the reverse input cutoff clutch. The difference is made small so that abnormal noise (vibration) when catch-up lock occurs can be reduced. For example, as shown in FIG. 8A, in the configuration in which the reverse input cutoff clutch is arranged on the output side from the reduction gear, the input rotational speed from the motor unit is 2000 rpm, and the reverse input rotational speed from the output side is 500 rpm. When the input rotation is reduced to 1/10 by the speed reducer, the input rotation (2000 rpm) from the motor unit is reduced to 1/10 200 rpm and input to the reverse input cutoff clutch. The speed difference between the input rotation (200 rpm) and the reverse input rotation (500 rpm) in the clutch is 300 rpm. On the other hand, as shown in FIG. 8B, when the reverse input cutoff clutch is arranged on the input side from the reduction gear, the input rotation (2000 rpm) from the motor unit is not decelerated and the reverse input cutoff clutch Further, the reverse input rotation (500 rpm) from the output side is accelerated to 5000 rpm, which is 10 times through the speed reducer, and is input to the reverse input cutoff clutch. The difference in speed between 2000 rpm) and reverse input rotation (5000 rpm) is 3000 rpm.
このように、逆入力遮断クラッチにおける入力回転と逆入力回転との速度差は、モータ部と逆入力遮断クラッチとの間に減速機を配置し、減速機によって減速された回転運動を逆入力遮断クラッチに入力するように構成した方が小さくなるので、追いつきロック発生時のローラの再係合に伴う異音(振動)を低減することが可能となる。 As described above, the speed difference between the input rotation and the reverse input rotation in the reverse input cutoff clutch is such that a speed reducer is disposed between the motor unit and the reverse input cutoff clutch, and the rotational motion decelerated by the speed reducer is reverse input cut off. Since the configuration is such that the input to the clutch is smaller, it is possible to reduce the noise (vibration) associated with the re-engagement of the roller when a catch-up lock occurs.
以上、本発明に係る電動アクチュエータの実施形態について説明したが、本発明は上記実施形態に何ら限定されるものではなく、本発明の要旨を逸脱しない範囲内において、さらに種々なる形態で実施し得ることは勿論のことである。 As mentioned above, although embodiment of the electric actuator which concerns on this invention was described, this invention is not limited to the said embodiment at all, In the range which does not deviate from the summary of this invention, it can implement with a various form. Of course.
上記実施形態では、電動モータとして、ステータとロータとが径方向に隙間を介して対向するように配置されたラジアルギャップ型の電動モータを例示したが、任意の構成のモータを採用することができる。例えば、ステータとロータとが軸方向に隙間をもって対向するように配置されたアキシャルギャップ型の電動モータであってもよい。 In the above-described embodiment, the radial gap type electric motor in which the stator and the rotor are arranged to face each other with a gap in the radial direction is exemplified as the electric motor. However, a motor having an arbitrary configuration can be adopted. . For example, an axial gap type electric motor in which the stator and the rotor are arranged so as to face each other with a gap in the axial direction may be used.
また、上記実施形態では、減速機として遊星ギヤ減速機を例示したが、減速機はこれに限らない。例えば、モータ部と一体的に回転する入力回転体としての太陽ローラと、太陽ローラの外周に配置された軌道リングと、太陽ローラと軌道リングとの間に回転可能に配置された遊星回転体しての複数の遊星ローラと、各遊星ローラを保持する出力回転体としてのキャリアとを有する、トラクションドライブ式の遊星減速機を採用してもよい。また、遊星減速機以外の構成を有する減速機を使用することも可能である。 Moreover, in the said embodiment, although the planetary gear reduction gear was illustrated as a reduction gear, a reduction gear is not restricted to this. For example, a sun roller as an input rotator that rotates integrally with the motor unit, an orbit ring disposed on the outer periphery of the sun roller, and a planetary rotator disposed rotatably between the sun roller and the orbit ring. A traction drive type planetary speed reducer having a plurality of planetary rollers and a carrier as an output rotating body that holds each planetary roller may be adopted. It is also possible to use a speed reducer having a configuration other than the planetary speed reducer.
また、逆入力遮断クラッチは、上記実施形態のものに限らない。逆入力に対するすべりねじ機構の正逆両方向の回転を防止できるものであれば、他の構成のものを適用してもよい。また、すべりねじ機構は、上記実施形態のような、ナットを回転させてねじ軸を軸方向に進退させる機構に限らず、反対にねじ軸を回転させてナットを進退させる機構であってもよい。 Further, the reverse input cutoff clutch is not limited to that of the above embodiment. Other configurations may be applied as long as the sliding screw mechanism can be prevented from rotating in both forward and reverse directions with respect to reverse input. Further, the sliding screw mechanism is not limited to a mechanism that rotates the nut and advances and retracts the screw shaft in the axial direction as in the above embodiment, but may be a mechanism that rotates the screw shaft and advances and retracts the nut. .
1 電動アクチュエータ
2 モータ部
3 すべりねじ機構(運動変換機構)
4 逆入力遮断クラッチ
14 ねじ軸
15 ナット
19 入力部材
20 出力部材
21 外輪(静止部材)
22 ローラ(ロック部材)
26 減速機
DESCRIPTION OF
4 Reverse input cutoff clutch 14
22 Roller (locking member)
26 Reducer
Claims (6)
前記運動変換機構を、ねじ軸とこれに螺合するナットとを有するすべりねじ機構で構成し、
前記モータ部とは反対の出力側からの逆入力に対して前記すべりねじ機構の正逆両方向の回転を防止する逆入力遮断クラッチを設けたことを特徴とする電動アクチュエータ。 In an electric actuator comprising a motor unit and a motion conversion mechanism that converts a rotational motion of the motor unit into a linear motion,
The motion conversion mechanism is constituted by a sliding screw mechanism having a screw shaft and a nut screwed to the screw shaft,
An electric actuator comprising a reverse input shut-off clutch that prevents the sliding screw mechanism from rotating in both forward and reverse directions against reverse input from an output side opposite to the motor unit.
前記モータ部からの入力によって回転する入力部材と、
前記入力部材の回転に伴って回転してその回転力を前記すべりねじ機構へ出力する出力部材と、
回転しないように固定された静止部材と、
前記モータ部から入力される駆動時に、回転する前記入力部材によって前記静止部材と前記出力部材とに対する係合が解除されて前記出力部材の回転を許容し、前記モータ部から入力されない停止時に、前記静止部材と前記出力部材とに係合して前記出力部材の正逆両方向の回転を防止するロック部材とを有する請求項1に記載の電動アクチュエータ。 The reverse input cutoff clutch is
An input member that rotates by an input from the motor unit;
An output member that rotates with the rotation of the input member and outputs the rotational force to the sliding screw mechanism;
A stationary member fixed so as not to rotate;
At the time of driving input from the motor unit, the rotating input member is disengaged from the stationary member and the output member by the rotating input member to allow rotation of the output member, and at the time of stop not input from the motor unit, The electric actuator according to claim 1, further comprising: a lock member that engages with the stationary member and the output member to prevent the output member from rotating in both forward and reverse directions.
前記逆入力遮断クラッチを、前記減速機よりも出力側に配置した請求項2に記載の電動アクチュエータ。 A speed reducer that decelerates and transmits the rotational motion of the motor unit;
The electric actuator according to claim 2, wherein the reverse input cut-off clutch is disposed on the output side of the speed reducer.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017182341A JP2019058032A (en) | 2017-09-22 | 2017-09-22 | Electric actuator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017182341A JP2019058032A (en) | 2017-09-22 | 2017-09-22 | Electric actuator |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019058032A true JP2019058032A (en) | 2019-04-11 |
Family
ID=66107726
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017182341A Pending JP2019058032A (en) | 2017-09-22 | 2017-09-22 | Electric actuator |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019058032A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021037868A (en) * | 2019-09-04 | 2021-03-11 | アイシン精機株式会社 | Vehicle height adjustment device |
| WO2023248319A1 (en) * | 2022-06-21 | 2023-12-28 | 三菱電機株式会社 | Actuator |
-
2017
- 2017-09-22 JP JP2017182341A patent/JP2019058032A/en active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021037868A (en) * | 2019-09-04 | 2021-03-11 | アイシン精機株式会社 | Vehicle height adjustment device |
| JP7348593B2 (en) | 2019-09-04 | 2023-09-21 | 株式会社アイシン | vehicle height adjustment device |
| WO2023248319A1 (en) * | 2022-06-21 | 2023-12-28 | 三菱電機株式会社 | Actuator |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6335443B2 (en) | Electric brake device | |
| US9182021B2 (en) | Electric linear motion actuator and electric disk brake system | |
| JP6591986B2 (en) | Drum brake device including parking brake operating in duo servo mode, vehicle and assembly method related thereto | |
| JP6559349B2 (en) | Disc brake | |
| US10247270B2 (en) | Motion conversion mechanism and electric brake actuator using the same | |
| WO2013088901A1 (en) | Clutch actuator | |
| KR20200116523A (en) | Disc brake and planetary gear reduction mechanism | |
| JP2009127737A (en) | Electric disc brake | |
| JP4304418B2 (en) | Electric disc brake | |
| WO2012124811A1 (en) | Electric braking device with parking mechanism | |
| JP2019058032A (en) | Electric actuator | |
| JP4697784B2 (en) | Electric linear actuator | |
| JP2005133863A (en) | Braking device | |
| JP2015086886A (en) | Electrically-driven linear motion actuator and electric brake device | |
| JP4959639B2 (en) | Electric brake device | |
| JP2014101973A (en) | Electric parking brake device | |
| WO2019059355A1 (en) | Electric actuator | |
| JP2014211213A (en) | Power transmission device | |
| JP2008069793A (en) | Electric linear actuator | |
| WO2023062824A1 (en) | Disc brake and planetary gear speed reduction mechanism | |
| JP7398345B2 (en) | Disc brake and planetary gear reduction mechanism | |
| JP2013249931A (en) | Reduction gear and electric parking brake device including the same | |
| CN221497970U (en) | Brake driving device, brake and vehicle | |
| JP2020048392A (en) | Electric actuator | |
| JP2007231969A (en) | Vehicular disc brake |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200316 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201210 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201222 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210216 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210628 |