JP2012143589A - ロボット手術のためのモジュールマニピュレーター支持体 - Google Patents
ロボット手術のためのモジュールマニピュレーター支持体 Download PDFInfo
- Publication number
- JP2012143589A JP2012143589A JP2012071972A JP2012071972A JP2012143589A JP 2012143589 A JP2012143589 A JP 2012143589A JP 2012071972 A JP2012071972 A JP 2012071972A JP 2012071972 A JP2012071972 A JP 2012071972A JP 2012143589 A JP2012143589 A JP 2012143589A
- Authority
- JP
- Japan
- Prior art keywords
- manipulator
- joint
- arm
- setup
- platform
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000002432 robotic surgery Methods 0.000 abstract description 5
- 238000000034 method Methods 0.000 description 24
- 230000007246 mechanism Effects 0.000 description 14
- 238000001356 surgical procedure Methods 0.000 description 14
- 238000013519 translation Methods 0.000 description 12
- 239000012636 effector Substances 0.000 description 7
- 230000000694 effects Effects 0.000 description 6
- 230000009286 beneficial effect Effects 0.000 description 5
- 230000003993 interaction Effects 0.000 description 3
- 229920003259 poly(silylenemethylene) Polymers 0.000 description 3
- 238000012549 training Methods 0.000 description 3
- 230000009466 transformation Effects 0.000 description 3
- 208000002847 Surgical Wound Diseases 0.000 description 2
- 230000000712 assembly Effects 0.000 description 2
- 238000000429 assembly Methods 0.000 description 2
- 238000007675 cardiac surgery Methods 0.000 description 2
- 238000002324 minimally invasive surgery Methods 0.000 description 2
- 238000011084 recovery Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 239000000523 sample Substances 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 210000000707 wrist Anatomy 0.000 description 2
- 210000001015 abdomen Anatomy 0.000 description 1
- 210000003815 abdominal wall Anatomy 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 210000001072 colon Anatomy 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 210000004351 coronary vessel Anatomy 0.000 description 1
- 238000002405 diagnostic procedure Methods 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000002496 gastric effect Effects 0.000 description 1
- 210000004247 hand Anatomy 0.000 description 1
- 230000005764 inhibitory process Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012978 minimally invasive surgical procedure Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 1
- 230000002980 postoperative effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/304—Surgical robots including a freely orientable platform, e.g. so called 'Stewart platforms'
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
- A61B2090/506—Supports for surgical instruments, e.g. articulated arms using a parallelogram linkage, e.g. panthograph
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/02—Arm motion controller
- Y10S901/09—Closed loop, sensor feedback controls arm movement
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/14—Arm movement, spatial
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/14—Arm movement, spatial
- Y10S901/15—Jointed arm
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/14—Arm movement, spatial
- Y10S901/16—Cartesian, three degrees of freedom
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/14—Arm movement, spatial
- Y10S901/17—Cylindrical
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/14—Arm movement, spatial
- Y10S901/18—Spherical
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Robotics (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Veterinary Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Manipulator (AREA)
- Endoscopes (AREA)
- Surgical Instruments (AREA)
Abstract
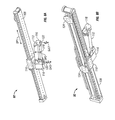
【解決手段】ロボット手術システムは、取り付けベース、複数の手術器具、および関節支持体アセンブリ30を備える、各器具は、関連する最小侵襲的アパーチャを通って患者中に、所望の内部手術部位まで挿入可能である。上記関節支持体アセンブリは、上記ベースに対して上記複数の器具を移動可能に支持する。支持体は、一般に、配向プラットホーム36、この配向プラットホームを上記ベースに移動可能に支持するプラットホームリンケージ、および上記配向プラットホームに取り付けられる複数のマニピュレーター32,34を備え、ここで、各マニピュレーターは、付随する器具を移動可能に支持する。
【選択図】図5−1
Description
本発明は、一般に、医療用、手術用、および/またはロボットデバイスおよびシステムに関する。例示の実施形態では、本発明は、手術用器具を移動するためのマニピュレーターのようなロボットマニピュレーター、内視鏡またはその他の画像チャプチャーデバイスを支持し、そしてそれらを患者身体中の所望の手術部位と整列するための改良された構造物を有する最小侵襲的ロボット手術システムを提供する。
本発明は、一般に、医療用、手術用、そして/またはロボットデバイスおよびシステムに関する。多くの実施形態では、本発明は、手術用器具を移動するためのマニピュレーターのようなロボットマニピュレーター、内視鏡またはその他の画像チャプチャーデバイスを支持し、そしてそれらを患者身体中の所望の手術部位と整列するための改良された構造物を有する最小侵襲的ロボット手術システムを提供する。改良されたモジュールマニピュレーター支持体は、いくつかの利点を提供し得、これには、増大された操縦性、手術室における改良されたスペース利用、より迅速およびより容易なセットアップ、使用の間のロボットデバイス間の衝突防止、および/またはこれら新たな手術システムの低減された機械的複雑さ、およびサイズが含まれる。このような利点は、次いで、このようなロボット手術システムの使用の有効性および容易さを増大する。
より特定すれば、本願発明は以下の項目に関し得る。
(項目1)
ロボット手術システムであって:
取り付けベース;
複数の手術器具であって、各器具が付随する関連侵襲アパーチャを通じて患者中に挿入可能である複数の手術器具;
上記複数の器具を上記ベースに対して移動可能に支持する関節支持体アセンブリを備え、
上記アセンブリが:
配向プラットホーム;
上記配向プラットホームを上記ベースに対して移動可能に支持するプラットホームリンケージ;および
上記配向プラットホームに取り付けられる複数のマニピュレーターであって、各マニピュレーターが付随する器具を移動可能に支持する複数のマニピュレーターを備える、システム。
(項目2)
上記取り付けベースが、上記関節支持体アセンブリが上記ベースからほぼ下方に延びることを許容するような天井で支持される構造物を備える、項目1に記載のシステム。
(項目3)
上記プラットホームリンケージが、直線状レール、上記レールに連結可能であるスライド可能なキャリッジ、および近位端上の上記キャリッジおよび遠位端上の上記配向プラットホームに回転可能に連結可能な少なくとも1つのアームを備える、項目1に記載のシステム。
(項目4)
上記プラットホームリンケージが、上記配向プラットホームの三次元並進を収容する、項目3に記載のシステム。
(項目5)
上記プラットホームリンケージが、上記配向プラットホームの1つの軸の周りの回転を収容する、項目3に記載のシステム。
(項目6)
上記配向プラットホームに連結可能な複数のアームをさらに備え、各アームが、付随するマニピュレーターを移動可能に支持し、そして予備配置可能である離脱可能に固定可能なリンクおよびジョイントを規定する、項目1に記載のシステム。
(項目7)
上記配向プラットホームが、上記複数のアームに回転可能に連結可能な4つのハブ、および上記プラットホームリンケージに連結可能な第5のハブを備え、上記第5のハブが旋回点と整列され、そして上記旋回点の周りの上記配向プラットホームの回転を収容する、項目6に記載のシステム。
(項目8)
各アームが、上記固定可能なリンクおよびジョイントの一次元の並進を収容する、項目6に記載のシステム。
(項目9)
各アームが、上記固定可能なリンクおよびジョイントの2つまたは3つの軸の周りの回転を収容する、項目6に記載のシステム。
(項目10)
各アームが、4を超えない自由度を有する、項目6に記載のシステム。
(項目11)
上記システムが、器具マニピュレーターを移動可能に支持するための3つのアーム、および画像キャプチャーデバイスマニピュレーターを移動可能に支持するための1つアームを備える、項目6に記載のシステム。
(項目12)
少なくとも1つのアームが、一対の隣接する固定可能な回転ジョイント間に延びる、少なくとも1つのバランスされた固定可能な接続された平衡四辺形リンケージ構造を含み、上記接続された構造がほぼ垂直方向にある移動を収容し、そして上記隣接する回転ジョイントが垂直軸の周りの旋回移動を収容する、項目6に記載のシステム。
(項目13)
上記関節支持体アセンブリに連結されたブレーキシステムをさらに備え、上記ブレーキシステムが、先に少なくとも実質的に固定された形態に配置された上記固定可能なリンクの関節運動を離脱可能に阻害し、上記ブレーキシステムが上記固定された形態に向かって付勢され、上記ブレーキシステムが、上記固定可能なリンクおよびジョイントを、上記固定可能なリンクおよびジョイントが関節運動され得る再位置決め可能な形態に解放するためにブレーキ解放アクチュエーターを含む、項目6に記載のシステム。
(項目14)
複数の上記固定可能なリンクおよびジョイントをサーボ機構に連結するジョイントセンサーシステムをさらに備え、上記センサーシステムがジョイント配置信号を生成し、上記サーボ機構がコンピューターを含み、そして上記ジョイントセンサーシステムが上記ジョイント配置信号を上記コンピューターに伝達する、項目6に記載のロボットシステム。
(項目15)
上記コンピューターが、上記取り付けベースに対して固定された参照座標系と、上記ジョイント配置信号を用いる器具との間の座標系変換を算出する、項目14に記載のロボットシステム。
(項目16)
少なくとも1つのマニピュレーターが、マニピュレーターベースが水平に対して固定された角度にあるように機械的に拘束される、項目1に記載のシステム。
(項目17)
上記少なくとも1つのマニピュレーターが、約45゜から約50゜までの範囲で水平に対して角度がオフセットされている、項目16に記載のシステム。
(項目18)
上記少なくとも1つのマニピュレーターが、約15゜だけ水平に対して角度がオフセットされている、項目16に記載のシステム。
(項目19)
上記少なくとも1つのマニピュレーターが、約65゜から約75゜までの範囲で水平に対して角度がオフセットされている、項目16に記載のシステム。
(項目20)
上記少なくとも1つのマニピュレーターが、スペース中の旋回点の周りで上記器具の球旋回を拘束するためのオフセット遠隔リンケージを備える、項目16に記載のシステム。
(項目21)
上記オフセット遠隔中心マニピュレーターが、第1の軸の周りの回転のために平行四辺形リンケージベースに回転可能に連結されるマニピュレーターベースを有する関節リンケージアセンブリを備える項目20に記載のシステムであって、上記平行四辺形リンケージベースが複数の駆動されたリンクおよびジョイントによって器具ホルダーに連結され、上記器具が上記器具ホルダーに取り付けられ、そして上記シャフトが少なくとも1つの自由度で移動されるとき、上記駆動されたリンクおよびジョイントが上記器具の細長いシャフトを旋回点に対して拘束するように平行四辺形を規定し、ここで、上記第1の軸および上記平行四辺形リンケージベースに隣接する上記平行四辺形の第1の辺が上記旋回点で上記シャフトと交差し、そして上記平行四辺形の第1の辺が上記第1の軸から角度がオフセットされる、システム。
(項目22)
上記配向プラットホームに連結可能なディスプレイをさらに備える、項目1に記載のシステム。
(項目23)
上記ディスプレイが、相互作用モニターを備える、項目22に記載のシステム。
(項目24)
ロボット手術システムにおける使用のためのモジュールマニピュレーター支持体であって、上記システムが、取り付けベース、複数の手術器具、および組織を操作するように付随する器具を移動するための駆動されたリンクおよびジョイントを規定する複数のマニピュレーターを備え、上記ベースに対して上記マニピュレーターを移動可能に支持および位置決めするための上記支持体が:
上記取り付けベースに連結可能な配向プラットホーム;および
上記配向プラットホームに連結可能な複数のアームであって、各アームが付随するマニピュレーターを移動可能に支持し、そして予備配置可能である離脱可能に固定可能なリンクおよびジョイントを規定する、支持体。
(項目25)
ロボット手術システムであって:
天井高さ取り付けベース;
複数の手術器具;
上記複数の器具を上記ベースに対して移動可能に支持する関節支持体アセンブリであって、上記アセンブリが:
上記関節支持体アセンブリが上記ベースからほぼ下方に延びることを許容するように上記ベースに連結可能な配向プラットホーム;
上記配向プラットホームに連結可能な複数のアームであって、各アームが予備配置可能である離脱可能に固定可能なリンクおよびジョイントを規定する複数のアーム;および
上記複数のアームに連結可能な複数のマニピュレーターであって、各マニピュレーターが組織を操作するように上記複数の器具を移動するために駆動されたリンクおよびジョイントを規定する複数のマニピュレーターを備える、システム。
(項目26)
取り付けベース、複数の手術器具、および上記複数の器具を上記ベースに対して移動可能に支持する関節支持体アセンブリを有するロボット手術システムを調製するための方法であって:
配向プラットホームを、上記配向プラットホームに取り付けられた複数のマニピュレーター予備位置決めするために、上記配向プラットホームを移動可能に支持するプラットホームリンケージを上記ベースに対して、上記複数のマニピュレーターによって支持される手術器具が関連する最小侵襲的アパーチャに向かって配向されるように関節運動することによって移動する工程を包含する、方法。
(項目27)
上記移動する工程が、上記配向プラットホームを三次元で並進することを包含する、項目26に記載の方法。
(項目28)
上記移動する工程が、1つの軸の周りで上記配向プラットホームを回転することを含む、項目26に記載の方法。
(項目29)
上記配向プラットホームに連結可能な複数のアームを関節運動することによって、上記複数のマニピュレーターを移動する工程をさらに包含する、項目26に記載の方法。
(項目30)
上記プラットホームリンケージ、配向プラットホーム、またはアームを、さらなる関節運動を防ぐようにブレーキシステムで拘束する工程をさらに包含する、項目30に記載の方法。
図1〜4は、米国特許第6,246,200号により詳細に記載されている、最小侵襲的ロボット手術を実施するためのロボット手術システム1を示す。操作者O(一般に外科医)は、手術テーブルT上に横たわる患者Pに対して最小侵襲的手術手順を実施し、操作者Oは、外科医のコンソール3で1つ以上の入力デバイスまたはマスター2を操作する。この外科医の入力に応答して、コンソール3のコンピュータープロセッサ4は、内視鏡手術器具またはツール5の動きを取り扱い、ロボット患者側システム6(この例では、カートに載せられたシステム)を経由してこれら器具のサーボ機械的移動を行う。
Claims (1)
- 図5Aに記載のモジュールマミピュレーター支持体アセンブリ。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/043,688 | 2005-01-24 | ||
| US11/043,688 US7763015B2 (en) | 2005-01-24 | 2005-01-24 | Modular manipulator support for robotic surgery |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007552394A Division JP2008528130A (ja) | 2005-01-24 | 2006-01-24 | ロボット手術のためのモジュールマニピュレーター支持体 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013206099A Division JP6170399B2 (ja) | 2005-01-24 | 2013-10-01 | ロボット手術のためのモジュールマニピュレーター支持体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012143589A true JP2012143589A (ja) | 2012-08-02 |
| JP5730233B2 JP5730233B2 (ja) | 2015-06-03 |
Family
ID=36463500
Family Applications (11)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007552394A Withdrawn JP2008528130A (ja) | 2005-01-24 | 2006-01-24 | ロボット手術のためのモジュールマニピュレーター支持体 |
| JP2011203738A Active JP5500734B2 (ja) | 2005-01-24 | 2011-09-16 | ロボット手術のためのモジュールマニピュレーター支持体 |
| JP2011203739A Active JP5622694B2 (ja) | 2005-01-24 | 2011-09-16 | ロボット手術のためのモジュールマニピュレーター支持体 |
| JP2012071972A Active JP5730233B2 (ja) | 2005-01-24 | 2012-03-27 | ロボット手術装置及びその作動方法 |
| JP2013206099A Active JP6170399B2 (ja) | 2005-01-24 | 2013-10-01 | ロボット手術のためのモジュールマニピュレーター支持体 |
| JP2014097355A Active JP6444055B2 (ja) | 2005-01-24 | 2014-05-09 | ロボット手術のためのモジュールマニピュレーター支持体 |
| JP2014170133A Active JP6185893B2 (ja) | 2005-01-24 | 2014-08-25 | ロボット手術のためのモジュールマニピュレーター支持体 |
| JP2015196043A Active JP6277165B2 (ja) | 2005-01-24 | 2015-10-01 | ロボット手術システム |
| JP2018171302A Active JP6935376B2 (ja) | 2005-01-24 | 2018-09-13 | ロボット手術システム |
| JP2020085248A Pending JP2020124596A (ja) | 2005-01-24 | 2020-05-14 | ロボット手術システム |
| JP2021171954A Pending JP2022009321A (ja) | 2005-01-24 | 2021-10-20 | ロボット手術システム |
Family Applications Before (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007552394A Withdrawn JP2008528130A (ja) | 2005-01-24 | 2006-01-24 | ロボット手術のためのモジュールマニピュレーター支持体 |
| JP2011203738A Active JP5500734B2 (ja) | 2005-01-24 | 2011-09-16 | ロボット手術のためのモジュールマニピュレーター支持体 |
| JP2011203739A Active JP5622694B2 (ja) | 2005-01-24 | 2011-09-16 | ロボット手術のためのモジュールマニピュレーター支持体 |
Family Applications After (7)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013206099A Active JP6170399B2 (ja) | 2005-01-24 | 2013-10-01 | ロボット手術のためのモジュールマニピュレーター支持体 |
| JP2014097355A Active JP6444055B2 (ja) | 2005-01-24 | 2014-05-09 | ロボット手術のためのモジュールマニピュレーター支持体 |
| JP2014170133A Active JP6185893B2 (ja) | 2005-01-24 | 2014-08-25 | ロボット手術のためのモジュールマニピュレーター支持体 |
| JP2015196043A Active JP6277165B2 (ja) | 2005-01-24 | 2015-10-01 | ロボット手術システム |
| JP2018171302A Active JP6935376B2 (ja) | 2005-01-24 | 2018-09-13 | ロボット手術システム |
| JP2020085248A Pending JP2020124596A (ja) | 2005-01-24 | 2020-05-14 | ロボット手術システム |
| JP2021171954A Pending JP2022009321A (ja) | 2005-01-24 | 2021-10-20 | ロボット手術システム |
Country Status (5)
| Country | Link |
|---|---|
| US (7) | US7763015B2 (ja) |
| EP (6) | EP2329790B1 (ja) |
| JP (11) | JP2008528130A (ja) |
| CN (9) | CN102579133B (ja) |
| WO (1) | WO2006079108A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017098708A1 (ja) | 2015-12-11 | 2017-06-15 | 川崎重工業株式会社 | 外科手術システム |
| KR20180090350A (ko) | 2015-12-11 | 2018-08-10 | 카와사키 주코교 카부시키 카이샤 | 외과수술 시스템, 매니퓰레이터 암 및 매니퓰레이터 암 지지체 |
| WO2020183740A1 (ja) | 2019-03-12 | 2020-09-17 | 功祐 氏平 | 低侵襲性手術機器 |
| US11642148B2 (en) | 2019-03-12 | 2023-05-09 | Kosuke Ujihira | Minimally-invasive surgery equipment |
Families Citing this family (395)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6132368A (en) | 1996-12-12 | 2000-10-17 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| US8182469B2 (en) | 1997-11-21 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Surgical accessory clamp and method |
| US8529582B2 (en) * | 1996-12-12 | 2013-09-10 | Intuitive Surgical Operations, Inc. | Instrument interface of a robotic surgical system |
| US6331181B1 (en) | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US7727244B2 (en) | 1997-11-21 | 2010-06-01 | Intuitive Surgical Operation, Inc. | Sterile surgical drape |
| US7666191B2 (en) | 1996-12-12 | 2010-02-23 | Intuitive Surgical, Inc. | Robotic surgical system with sterile surgical adaptor |
| US9050119B2 (en) | 2005-12-20 | 2015-06-09 | Intuitive Surgical Operations, Inc. | Cable tensioning in a robotic surgical system |
| US8206406B2 (en) | 1996-12-12 | 2012-06-26 | Intuitive Surgical Operations, Inc. | Disposable sterile surgical adaptor |
| US8944070B2 (en) | 1999-04-07 | 2015-02-03 | Intuitive Surgical Operations, Inc. | Non-force reflecting method for providing tool force information to a user of a telesurgical system |
| US10188471B2 (en) * | 1999-09-17 | 2019-01-29 | Intuitive Surgical Operations, Inc. | Tele-operative surgical systems and methods of control at joint limits using inverse kinematics |
| US8004229B2 (en) | 2005-05-19 | 2011-08-23 | Intuitive Surgical Operations, Inc. | Software center and highly configurable robotic systems for surgery and other uses |
| US9517106B2 (en) | 1999-09-17 | 2016-12-13 | Intuitive Surgical Operations, Inc. | Systems and methods for commanded reconfiguration of a surgical manipulator using the null-space |
| US6994708B2 (en) * | 2001-04-19 | 2006-02-07 | Intuitive Surgical | Robotic tool with monopolar electro-surgical scissors |
| US8398634B2 (en) | 2002-04-18 | 2013-03-19 | Intuitive Surgical Operations, Inc. | Wristed robotic surgical tool for pluggable end-effectors |
| US7960935B2 (en) | 2003-07-08 | 2011-06-14 | The Board Of Regents Of The University Of Nebraska | Robotic devices with agent delivery components and related methods |
| US7763015B2 (en) * | 2005-01-24 | 2010-07-27 | Intuitive Surgical Operations, Inc. | Modular manipulator support for robotic surgery |
| US7837674B2 (en) | 2005-01-24 | 2010-11-23 | Intuitive Surgical Operations, Inc. | Compact counter balance for robotic surgical systems |
| US9295379B2 (en) | 2005-04-18 | 2016-03-29 | M.S.T. Medical Surgery Technologies Ltd. | Device and methods of improving laparoscopic surgery |
| US8414475B2 (en) | 2005-04-18 | 2013-04-09 | M.S.T. Medical Surgery Technologies Ltd | Camera holder device and method thereof |
| US9943372B2 (en) * | 2005-04-18 | 2018-04-17 | M.S.T. Medical Surgery Technologies Ltd. | Device having a wearable interface for improving laparoscopic surgery and methods for use thereof |
| US9789608B2 (en) | 2006-06-29 | 2017-10-17 | Intuitive Surgical Operations, Inc. | Synthetic representation of a surgical robot |
| KR101298492B1 (ko) * | 2005-06-30 | 2013-08-21 | 인튜어티브 서지컬 인코포레이티드 | 멀티암 로보트 원격 외과수술에서 툴 상태에 대한인디케이터와 통신 |
| US8273076B2 (en) | 2005-06-30 | 2012-09-25 | Intuitive Surgical Operations, Inc. | Indicator for tool state and communication in multi-arm robotic telesurgery |
| US11432895B2 (en) | 2005-12-20 | 2022-09-06 | Intuitive Surgical Operations, Inc. | Wireless communication in a robotic surgical system |
| US8672922B2 (en) | 2005-12-20 | 2014-03-18 | Intuitive Surgical Operations, Inc. | Wireless communication in a robotic surgical system |
| JP5101519B2 (ja) | 2005-12-20 | 2012-12-19 | インテュイティブ サージカル インコーポレイテッド | ロボット手術システムの機器インターフェース |
| US8182470B2 (en) | 2005-12-20 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Telescoping insertion axis of a robotic surgical system |
| US8219178B2 (en) | 2007-02-16 | 2012-07-10 | Catholic Healthcare West | Method and system for performing invasive medical procedures using a surgical robot |
| US10893912B2 (en) | 2006-02-16 | 2021-01-19 | Globus Medical Inc. | Surgical tool systems and methods |
| US9782229B2 (en) | 2007-02-16 | 2017-10-10 | Globus Medical, Inc. | Surgical robot platform |
| US10653497B2 (en) | 2006-02-16 | 2020-05-19 | Globus Medical, Inc. | Surgical tool systems and methods |
| US10357184B2 (en) | 2012-06-21 | 2019-07-23 | Globus Medical, Inc. | Surgical tool systems and method |
| NL1031827C2 (nl) * | 2006-05-17 | 2007-11-20 | Univ Eindhoven Tech | Operatierobot. |
| KR101477121B1 (ko) | 2006-06-13 | 2014-12-29 | 인튜어티브 서지컬 인코포레이티드 | 미소절개 수술 시스템 |
| US20090234369A1 (en) * | 2006-06-19 | 2009-09-17 | Robarts Research Institute | Apparatus for guiding a medical tool |
| US9579088B2 (en) | 2007-02-20 | 2017-02-28 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices for surgical visualization and device manipulation |
| US8679096B2 (en) | 2007-06-21 | 2014-03-25 | Board Of Regents Of The University Of Nebraska | Multifunctional operational component for robotic devices |
| JP5466004B2 (ja) | 2006-06-22 | 2014-04-09 | ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ | 磁気的連結可能ロボット装置および関連する方法 |
| US8974440B2 (en) | 2007-08-15 | 2015-03-10 | Board Of Regents Of The University Of Nebraska | Modular and cooperative medical devices and related systems and methods |
| US20090192523A1 (en) | 2006-06-29 | 2009-07-30 | Intuitive Surgical, Inc. | Synthetic representation of a surgical instrument |
| US10258425B2 (en) | 2008-06-27 | 2019-04-16 | Intuitive Surgical Operations, Inc. | Medical robotic system providing an auxiliary view of articulatable instruments extending out of a distal end of an entry guide |
| US9718190B2 (en) | 2006-06-29 | 2017-08-01 | Intuitive Surgical Operations, Inc. | Tool position and identification indicator displayed in a boundary area of a computer display screen |
| US10008017B2 (en) | 2006-06-29 | 2018-06-26 | Intuitive Surgical Operations, Inc. | Rendering tool information as graphic overlays on displayed images of tools |
| ES2298051B2 (es) * | 2006-07-28 | 2009-03-16 | Universidad De Malaga | Sistema robotico de asistencia a la cirugia minimamente invasiva capaz de posicionar un instrumento quirurgico en respueta a las ordenes de un cirujano sin fijacion a la mesa de operaciones ni calibracion previa del punto de insercion. |
| US20130338679A1 (en) * | 2007-05-04 | 2013-12-19 | Technische Universiteit Eindhoven | Surgical Robot |
| US9084623B2 (en) | 2009-08-15 | 2015-07-21 | Intuitive Surgical Operations, Inc. | Controller assisted reconfiguration of an articulated instrument during movement into and out of an entry guide |
| US8620473B2 (en) | 2007-06-13 | 2013-12-31 | Intuitive Surgical Operations, Inc. | Medical robotic system with coupled control modes |
| US9089256B2 (en) | 2008-06-27 | 2015-07-28 | Intuitive Surgical Operations, Inc. | Medical robotic system providing an auxiliary view including range of motion limitations for articulatable instruments extending out of a distal end of an entry guide |
| US8903546B2 (en) | 2009-08-15 | 2014-12-02 | Intuitive Surgical Operations, Inc. | Smooth control of an articulated instrument across areas with different work space conditions |
| US9138129B2 (en) | 2007-06-13 | 2015-09-22 | Intuitive Surgical Operations, Inc. | Method and system for moving a plurality of articulated instruments in tandem back towards an entry guide |
| US9469034B2 (en) | 2007-06-13 | 2016-10-18 | Intuitive Surgical Operations, Inc. | Method and system for switching modes of a robotic system |
| EP3078344B1 (en) | 2007-07-12 | 2020-02-26 | Board of Regents of the University of Nebraska | Actuation in robotic devices |
| CA2695615A1 (en) | 2007-08-15 | 2009-02-19 | Board Of Regents Of The University Of Nebraska | Medical inflation, attachment, and delivery devices and related methods |
| EP2209595B1 (en) * | 2007-10-19 | 2021-09-01 | Force Dimension Technologies Sàrl | Device for movement between an input member and an output member |
| US8864652B2 (en) | 2008-06-27 | 2014-10-21 | Intuitive Surgical Operations, Inc. | Medical robotic system providing computer generated auxiliary views of a camera instrument for controlling the positioning and orienting of its tip |
| US8916134B2 (en) * | 2008-07-11 | 2014-12-23 | Industry-Academic Cooperation Foundation, Yonsei University | Metal nanocomposite, preparation method and use thereof |
| KR100936928B1 (ko) * | 2008-07-25 | 2010-01-20 | (주)미래컴퍼니 | 수술용 로봇 |
| US9339342B2 (en) | 2008-09-30 | 2016-05-17 | Intuitive Surgical Operations, Inc. | Instrument interface |
| US9259274B2 (en) | 2008-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Passive preload and capstan drive for surgical instruments |
| KR101038417B1 (ko) * | 2009-02-11 | 2011-06-01 | 주식회사 이턴 | 수술 로봇 시스템 및 그 제어 방법 |
| US8423182B2 (en) * | 2009-03-09 | 2013-04-16 | Intuitive Surgical Operations, Inc. | Adaptable integrated energy control system for electrosurgical tools in robotic surgical systems |
| US8918211B2 (en) | 2010-02-12 | 2014-12-23 | Intuitive Surgical Operations, Inc. | Medical robotic system providing sensory feedback indicating a difference between a commanded state and a preferred pose of an articulated instrument |
| US9492927B2 (en) | 2009-08-15 | 2016-11-15 | Intuitive Surgical Operations, Inc. | Application of force feedback on an input device to urge its operator to command an articulated instrument to a preferred pose |
| US20110071541A1 (en) | 2009-09-23 | 2011-03-24 | Intuitive Surgical, Inc. | Curved cannula |
| US8623028B2 (en) | 2009-09-23 | 2014-01-07 | Intuitive Surgical Operations, Inc. | Surgical port feature |
| US8465476B2 (en) | 2009-09-23 | 2013-06-18 | Intuitive Surgical Operations, Inc. | Cannula mounting fixture |
| US8888789B2 (en) | 2009-09-23 | 2014-11-18 | Intuitive Surgical Operations, Inc. | Curved cannula surgical system control |
| JP5703305B2 (ja) * | 2009-11-13 | 2015-04-15 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 湾曲カニューレおよびロボットマニピュレーター |
| BR112012011326B1 (pt) * | 2009-11-13 | 2021-10-26 | Intuitive Surgical Operations, Inc | Sistema cirúrgico de cânula curva |
| KR100976344B1 (ko) * | 2009-12-02 | 2010-08-16 | 도상희 | 다단다축을 이용한 의료용 촬상장치의 거치대 |
| US8894633B2 (en) | 2009-12-17 | 2014-11-25 | Board Of Regents Of The University Of Nebraska | Modular and cooperative medical devices and related systems and methods |
| US8733028B2 (en) * | 2010-01-08 | 2014-05-27 | Mechdyne Corporation | Display transformation assembly for a visualization system |
| JP5704833B2 (ja) * | 2010-05-10 | 2015-04-22 | オリンパス株式会社 | 操作入力装置およびマニピュレータシステム |
| TWI391124B (zh) * | 2010-05-12 | 2013-04-01 | Univ Chang Gung | 手術定位裝置 |
| US20110282357A1 (en) | 2010-05-14 | 2011-11-17 | Intuitive Surgical Operations, Inc. | Surgical system architecture |
| KR101181569B1 (ko) * | 2010-05-25 | 2012-09-10 | 정창욱 | 단일 통로 수술 모드와 다통로 수술 모드를 실현할 수 있는 수술용 로봇 시스템 및 그 제어 방법 |
| CN101926680B (zh) * | 2010-08-02 | 2012-01-11 | 曹罡 | Ptcd辅助机械自动化装置 |
| CN101889871B (zh) * | 2010-08-02 | 2011-12-07 | 曹罡 | Ercp辅助机械手装置 |
| CN102018572B (zh) * | 2010-08-02 | 2013-04-03 | 曹罡 | 血管介入操作的机械手 |
| WO2013022423A1 (en) | 2010-08-06 | 2013-02-14 | Board Of Regents Of The University Of Nebraska | Methods and systems for handling or delivering materials for natural orifice surgery |
| AU2011302155B2 (en) * | 2010-09-14 | 2015-07-02 | The Johns Hopkins University | Robotic system to augment endoscopes |
| CN102018574B (zh) * | 2010-11-11 | 2012-06-27 | 北京理工大学 | 一种具有高负载能力的小体积医疗机械臂关节 |
| CN103209657B (zh) * | 2010-11-15 | 2016-03-23 | 直观外科手术操作公司 | 在手术仪器中去耦仪器轴滚动和末端执行器促动 |
| US9486189B2 (en) | 2010-12-02 | 2016-11-08 | Hitachi Aloka Medical, Ltd. | Assembly for use with surgery system |
| WO2012131660A1 (en) | 2011-04-01 | 2012-10-04 | Ecole Polytechnique Federale De Lausanne (Epfl) | Robotic system for spinal and other surgeries |
| WO2013048595A1 (en) | 2011-06-10 | 2013-04-04 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to surgical end effectors |
| WO2013009887A1 (en) | 2011-07-11 | 2013-01-17 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems and related methods |
| JP6021353B2 (ja) * | 2011-08-04 | 2016-11-09 | オリンパス株式会社 | 手術支援装置 |
| US9757206B2 (en) | 2011-08-21 | 2017-09-12 | M.S.T. Medical Surgery Technologies Ltd | Device and method for assisting laparoscopic surgery—rule based approach |
| US9204939B2 (en) | 2011-08-21 | 2015-12-08 | M.S.T. Medical Surgery Technologies Ltd. | Device and method for assisting laparoscopic surgery—rule based approach |
| US11561762B2 (en) * | 2011-08-21 | 2023-01-24 | Asensus Surgical Europe S.A.R.L. | Vocally actuated surgical control system |
| US10866783B2 (en) | 2011-08-21 | 2020-12-15 | Transenterix Europe S.A.R.L. | Vocally activated surgical control system |
| ITFI20110186A1 (it) * | 2011-08-26 | 2013-02-27 | Scuola Superiore Di Studi Universit Arie Di Perfe | Dispositivo robotico per l'impianto di interfacce neurali nel sistema nervoso periferico |
| US9795282B2 (en) | 2011-09-20 | 2017-10-24 | M.S.T. Medical Surgery Technologies Ltd | Device and method for maneuvering endoscope |
| DE102011115077A1 (de) * | 2011-09-28 | 2013-03-28 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Handhabungseinrichtung sowie Verfahren zum Betreiben einer Handhabungseinrichtung |
| EP3970784A1 (en) | 2012-01-10 | 2022-03-23 | Board of Regents of the University of Nebraska | Systems and devices for surgical access and insertion |
| EP4357083A3 (en) | 2012-05-01 | 2024-08-21 | Board of Regents of the University of Nebraska | Single site robotic device and related systems and methods |
| KR102167359B1 (ko) | 2012-06-01 | 2020-10-19 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 영공간을 이용한 수술 머니퓰레이터의 명령된 재구성을 위한 시스템 및 방법 |
| WO2013181522A1 (en) | 2012-06-01 | 2013-12-05 | Intuitive Surgical Operations, Inc. | Redundant axis and degree of freedom for hardware-constrained remote center robotic manipulator |
| CN111467038B (zh) | 2012-06-01 | 2023-06-16 | 直观外科手术操作公司 | 手术器械操纵器方面 |
| US9358074B2 (en) | 2012-06-01 | 2016-06-07 | Intuitive Surgical Operations, Inc. | Multi-port surgical robotic system architecture |
| JP6368710B2 (ja) | 2012-06-01 | 2018-08-01 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | ゼロ空間を使用したマニピュレータアームと患者との衝突回避 |
| EP2854687B1 (en) | 2012-06-01 | 2022-08-24 | Intuitive Surgical Operations, Inc. | Systems for avoiding collisions between manipulator arms using a null-space |
| US11317971B2 (en) | 2012-06-21 | 2022-05-03 | Globus Medical, Inc. | Systems and methods related to robotic guidance in surgery |
| US11864839B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical Inc. | Methods of adjusting a virtual implant and related surgical navigation systems |
| US11786324B2 (en) * | 2012-06-21 | 2023-10-17 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US11864745B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical, Inc. | Surgical robotic system with retractor |
| US11045267B2 (en) | 2012-06-21 | 2021-06-29 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US10624710B2 (en) | 2012-06-21 | 2020-04-21 | Globus Medical, Inc. | System and method for measuring depth of instrumentation |
| US11399900B2 (en) | 2012-06-21 | 2022-08-02 | Globus Medical, Inc. | Robotic systems providing co-registration using natural fiducials and related methods |
| US11857149B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | Surgical robotic systems with target trajectory deviation monitoring and related methods |
| US11253327B2 (en) | 2012-06-21 | 2022-02-22 | Globus Medical, Inc. | Systems and methods for automatically changing an end-effector on a surgical robot |
| US11298196B2 (en) | 2012-06-21 | 2022-04-12 | Globus Medical Inc. | Surgical robotic automation with tracking markers and controlled tool advancement |
| US11607149B2 (en) | 2012-06-21 | 2023-03-21 | Globus Medical Inc. | Surgical tool systems and method |
| US11974822B2 (en) | 2012-06-21 | 2024-05-07 | Globus Medical Inc. | Method for a surveillance marker in robotic-assisted surgery |
| US10136954B2 (en) | 2012-06-21 | 2018-11-27 | Globus Medical, Inc. | Surgical tool systems and method |
| US11395706B2 (en) | 2012-06-21 | 2022-07-26 | Globus Medical Inc. | Surgical robot platform |
| US11857266B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | System for a surveillance marker in robotic-assisted surgery |
| US11793570B2 (en) | 2012-06-21 | 2023-10-24 | Globus Medical Inc. | Surgical robotic automation with tracking markers |
| US10758315B2 (en) | 2012-06-21 | 2020-09-01 | Globus Medical Inc. | Method and system for improving 2D-3D registration convergence |
| US10350013B2 (en) | 2012-06-21 | 2019-07-16 | Globus Medical, Inc. | Surgical tool systems and methods |
| US12004905B2 (en) | 2012-06-21 | 2024-06-11 | Globus Medical, Inc. | Medical imaging systems using robotic actuators and related methods |
| US11116576B2 (en) | 2012-06-21 | 2021-09-14 | Globus Medical Inc. | Dynamic reference arrays and methods of use |
| US10231791B2 (en) | 2012-06-21 | 2019-03-19 | Globus Medical, Inc. | Infrared signal based position recognition system for use with a robot-assisted surgery |
| EP3680071B1 (en) | 2012-06-22 | 2021-09-01 | Board of Regents of the University of Nebraska | Local control robotic surgical devices |
| EP2882331A4 (en) | 2012-08-08 | 2016-03-23 | Univ Nebraska | ROBOTIC SURGICAL DEVICES, SYSTEMS AND CORRESPONDING METHODS |
| US9770305B2 (en) | 2012-08-08 | 2017-09-26 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems, and related methods |
| EP2879752B1 (en) * | 2012-08-14 | 2021-10-06 | Intuitive Surgical Operations, Inc. | Systems and methods for configuring components in a minimally invasive instrument |
| EP2884933B1 (en) | 2012-08-15 | 2020-10-07 | Intuitive Surgical Operations, Inc. | User initiated break-away clutching of a surgical mounting platform |
| EP2884937B1 (en) * | 2012-08-15 | 2022-10-05 | Intuitive Surgical Operations, Inc. | Systems for cancellation of joint motion using the null-space |
| CN104736095B (zh) * | 2012-08-15 | 2018-07-03 | 直观外科手术操作公司 | 由机器人手臂的手动运动控制的可移动手术安装平台 |
| CA2893369A1 (en) * | 2012-08-24 | 2014-02-27 | University Of Houston | Robotic device and systems for image-guided and robot-assisted surgery |
| US9301811B2 (en) | 2012-09-17 | 2016-04-05 | Intuitive Surgical Operations, Inc. | Methods and systems for assigning input devices to teleoperated surgical instrument functions |
| US10631939B2 (en) | 2012-11-02 | 2020-04-28 | Intuitive Surgical Operations, Inc. | Systems and methods for mapping flux supply paths |
| US20140148673A1 (en) | 2012-11-28 | 2014-05-29 | Hansen Medical, Inc. | Method of anchoring pullwire directly articulatable region in catheter |
| US9681982B2 (en) | 2012-12-17 | 2017-06-20 | Alcon Research, Ltd. | Wearable user interface for use with ocular surgical console |
| US10507066B2 (en) | 2013-02-15 | 2019-12-17 | Intuitive Surgical Operations, Inc. | Providing information of tools by filtering image areas adjacent to or on displayed images of the tools |
| KR20140110620A (ko) * | 2013-03-08 | 2014-09-17 | 삼성전자주식회사 | 수술 로봇 시스템 및 그 작동 방법 |
| CA2905948C (en) | 2013-03-14 | 2022-01-11 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to robotic surgical devices, end effectors, and controllers |
| CA2906672C (en) | 2013-03-14 | 2022-03-15 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to force control surgical systems |
| JP2016513556A (ja) | 2013-03-15 | 2016-05-16 | ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ | ロボット外科的デバイス、システム、および関連する方法 |
| US10542908B2 (en) * | 2013-04-25 | 2020-01-28 | Intuitive Surgical Operations, Inc. | Surgical equipment control input visualization field |
| US10420583B2 (en) | 2013-05-22 | 2019-09-24 | Covidien Lp | Methods and apparatus for controlling surgical instruments using a port assembly |
| WO2014199414A1 (ja) | 2013-06-13 | 2014-12-18 | テルモ株式会社 | 医療用マニピュレータおよびその制御方法 |
| WO2014199413A1 (ja) * | 2013-06-13 | 2014-12-18 | テルモ株式会社 | 医療用マニピュレータおよびその制御方法 |
| JP6479790B2 (ja) | 2013-07-17 | 2019-03-06 | ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ | ロボット外科的デバイス、システムおよび関連する方法 |
| CN103356295B (zh) * | 2013-08-07 | 2015-09-16 | 吴开俊 | 软镜手术辅助机械手系统及其控制方法 |
| CN109602496B (zh) | 2013-08-15 | 2021-07-20 | 直观外科手术操作公司 | 机器人器械从动元件 |
| EP3708105B1 (en) | 2013-08-15 | 2022-02-09 | Intuitive Surgical Operations, Inc. | Preloaded surgical instrument interface |
| EP3597135B1 (en) | 2013-08-15 | 2021-12-15 | Intuitive Surgical Operations, Inc. | Variable instrument preload mechanism controller |
| WO2015023840A1 (en) | 2013-08-15 | 2015-02-19 | Intuitive Surgical Operations, Inc. | Instrument sterile adapter drive interface |
| EP3033035B1 (en) | 2013-08-15 | 2020-11-25 | Intuitive Surgical Operations, Inc. | Instrument sterile adapter drive features |
| US9283048B2 (en) | 2013-10-04 | 2016-03-15 | KB Medical SA | Apparatus and systems for precise guidance of surgical tools |
| WO2015052629A1 (en) * | 2013-10-07 | 2015-04-16 | Srivastava Sudhir Prem | Modular interface for a robotic system |
| US9182076B2 (en) * | 2013-10-19 | 2015-11-10 | Russ Bassett Corporation | Touch entry display mount |
| US9366275B2 (en) | 2013-10-19 | 2016-06-14 | Russ Bassett Corporation | Slatwall clamp |
| CN103565529B (zh) * | 2013-11-11 | 2015-06-17 | 哈尔滨工程大学 | 一种机器人辅助微创外科手术多功能器械臂 |
| US9817019B2 (en) * | 2013-11-13 | 2017-11-14 | Intuitive Surgical Operations, Inc. | Integrated fiber bragg grating accelerometer in a surgical instrument |
| TWI511700B (zh) * | 2013-11-19 | 2015-12-11 | Univ Nat Taiwan Science Tech | 手術扶持裝置 |
| CN104758052B (zh) * | 2014-01-02 | 2017-02-08 | 中国科学院沈阳自动化研究所 | 一种消化内窥镜输送机器人位姿调节被动机械臂 |
| WO2015107099A1 (en) | 2014-01-15 | 2015-07-23 | KB Medical SA | Notched apparatus for guidance of an insertable instrument along an axis during spinal surgery |
| EP3099265B1 (en) * | 2014-01-31 | 2021-09-15 | Covidien LP | Interfaces for surgical systems |
| WO2015121311A1 (en) | 2014-02-11 | 2015-08-20 | KB Medical SA | Sterile handle for controlling a robotic surgical system from a sterile field |
| CN106028994B (zh) * | 2014-02-20 | 2019-01-22 | 直观外科手术操作公司 | 由机器人手臂的手动运动控制的手术安装平台的受限移动 |
| GB2523224C2 (en) * | 2014-03-07 | 2021-06-02 | Cambridge Medical Robotics Ltd | Surgical arm |
| WO2015142786A1 (en) * | 2014-03-17 | 2015-09-24 | Intuitive Surgical Operations, Inc. | Constant force spring with active bias |
| EP3119314B1 (en) | 2014-03-17 | 2020-05-06 | Intuitive Surgical Operations, Inc. | System and method for breakaway clutching in an articulated arm |
| WO2015142943A1 (en) | 2014-03-17 | 2015-09-24 | Intuitive Surgical Operations, Inc. | System and method for maintaining a tool pose |
| KR102356213B1 (ko) | 2014-03-17 | 2022-01-28 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 원격조정 의료 장치를 위한 안내 설정 |
| KR102252641B1 (ko) | 2014-03-17 | 2021-05-18 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 모드 전환 시의 진동을 감쇠시키기 위한 명령 성형 |
| CN106456265B (zh) * | 2014-03-17 | 2019-07-30 | 直观外科手术操作公司 | 使用逆运动学在关节极限下的遥控操作手术系统和控制方法 |
| EP4233775A3 (en) | 2014-03-17 | 2023-10-18 | Intuitive Surgical Operations, Inc. | Methods and devices for table pose tracking using fiducial markers |
| US10130436B2 (en) | 2014-03-17 | 2018-11-20 | Intuitive Surgical Operations, Inc. | Automated structure with pre-established arm positions in a teleoperated medical system |
| EP2923669B1 (en) | 2014-03-24 | 2017-06-28 | Hansen Medical, Inc. | Systems and devices for catheter driving instinctiveness |
| KR102592615B1 (ko) | 2014-03-31 | 2023-10-24 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 시프트 가능한 트랜스미션을 가진 수술 기구 |
| KR102399312B1 (ko) | 2014-04-01 | 2022-05-18 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 원격 조작 수술기기를 위한 제어 입력의 정확도 |
| EP3134022B1 (en) | 2014-04-24 | 2018-01-10 | KB Medical SA | Surgical instrument holder for use with a robotic surgical system |
| US10285765B2 (en) | 2014-05-05 | 2019-05-14 | Vicarious Surgical Inc. | Virtual reality surgical device |
| CN106456257B (zh) * | 2014-05-13 | 2019-11-05 | 柯惠Lp公司 | 手术机器人手臂支撑系统及使用方法 |
| CN106456259B (zh) | 2014-05-13 | 2019-06-04 | 柯惠Lp公司 | 手术机器人手臂支撑系统及使用方法 |
| WO2016008880A1 (en) | 2014-07-14 | 2016-01-21 | KB Medical SA | Anti-skid surgical instrument for use in preparing holes in bone tissue |
| US20170165847A1 (en) * | 2014-07-15 | 2017-06-15 | Koninklijke Philips N.V. | Reconfigurable robot architecture for minimally invasive procedures |
| US10251717B2 (en) | 2014-08-01 | 2019-04-09 | Intuitive Surgical Operations, Inc. | Damping a telesurgical system |
| US10058395B2 (en) | 2014-08-01 | 2018-08-28 | Intuitive Surgical Operations, Inc. | Active and semi-active damping in a telesurgical system |
| US10011018B2 (en) | 2014-08-15 | 2018-07-03 | Intuitive Surgical Operations, Inc. | Entry guide manipulator with a roll system and an instrument manipulator positioning system |
| JP6710199B2 (ja) | 2014-09-12 | 2020-06-17 | ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ | クイックリリースエンドエフェクターおよび関連するシステムおよび方法 |
| US10321964B2 (en) | 2014-09-15 | 2019-06-18 | Covidien Lp | Robotically controlling surgical assemblies |
| EP3200718A4 (en) | 2014-09-30 | 2018-04-25 | Auris Surgical Robotics, Inc | Configurable robotic surgical system with virtual rail and flexible endoscope |
| US10314463B2 (en) | 2014-10-24 | 2019-06-11 | Auris Health, Inc. | Automated endoscope calibration |
| CN115444567A (zh) | 2014-10-27 | 2022-12-09 | 直观外科手术操作公司 | 用于器械干扰补偿的系统和方法 |
| EP3212148A4 (en) | 2014-10-27 | 2018-07-11 | Intuitive Surgical Operations, Inc. | System and method for integrated surgical table icons |
| JP6676061B2 (ja) | 2014-10-27 | 2020-04-08 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 統合された手術台運動のためのシステム及び方法 |
| US10405944B2 (en) * | 2014-10-27 | 2019-09-10 | Intuitive Surgical Operations, Inc. | Medical device with active brake release control |
| KR102617042B1 (ko) | 2014-10-27 | 2023-12-27 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 수술 테이블에 등록하기 위한 시스템 및 방법 |
| JP6682512B2 (ja) | 2014-10-27 | 2020-04-15 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 一体化された手術台のシステム及び方法 |
| CN107072728B (zh) | 2014-10-27 | 2020-07-17 | 直观外科手术操作公司 | 用于在反应运动期间监测控制点的系统和方法 |
| GB201419645D0 (en) * | 2014-11-04 | 2014-12-17 | Cambridge Medical Robotics Ltd | Characterising motion constraints |
| EP3689257B1 (en) | 2014-11-11 | 2024-01-03 | Board of Regents of the University of Nebraska | Robotic device with compact joint design and related systems and methods |
| CN104622573B (zh) * | 2014-12-12 | 2017-06-09 | 北京航空航天大学 | 一种具有高刚性的四自由度远程运动中心机构 |
| CN104523306B (zh) * | 2015-01-05 | 2016-11-23 | 苏州康多机器人有限公司 | 一种用于微创手术操作的近似远心不动点机构 |
| US10013808B2 (en) | 2015-02-03 | 2018-07-03 | Globus Medical, Inc. | Surgeon head-mounted display apparatuses |
| US9974619B2 (en) | 2015-02-11 | 2018-05-22 | Engineering Services Inc. | Surgical robot |
| JP2016152906A (ja) | 2015-02-18 | 2016-08-25 | ソニー株式会社 | 医療用支持アーム装置及び医療用観察装置 |
| US10555782B2 (en) | 2015-02-18 | 2020-02-11 | Globus Medical, Inc. | Systems and methods for performing minimally invasive spinal surgery with a robotic surgical system using a percutaneous technique |
| US10925685B2 (en) * | 2015-03-25 | 2021-02-23 | Sony Olympus Medical Solutions Inc. | Medical observation device, surgical observation device, and medical observation system |
| WO2016164824A1 (en) * | 2015-04-09 | 2016-10-13 | Auris Surgical Robotics, Inc. | Surgical system with configurable rail-mounted mechanical arms |
| WO2016187054A1 (en) | 2015-05-15 | 2016-11-24 | Auris Surgical Robotics, Inc. | Surgical robotics system |
| US10058394B2 (en) | 2015-07-31 | 2018-08-28 | Globus Medical, Inc. | Robot arm and methods of use |
| US10646298B2 (en) | 2015-07-31 | 2020-05-12 | Globus Medical, Inc. | Robot arm and methods of use |
| JP6961146B2 (ja) | 2015-08-03 | 2021-11-05 | バーチャル インシジョン コーポレイションVirtual Incision Corporation | ロボット外科的デバイス、システムおよび関連する方法 |
| US10080615B2 (en) | 2015-08-12 | 2018-09-25 | Globus Medical, Inc. | Devices and methods for temporary mounting of parts to bone |
| CN105055028B (zh) * | 2015-08-19 | 2017-08-25 | 哈尔滨工业大学 | 一种微创外科手术机器人远心定位执行机构及设计方法 |
| EP3344179B1 (en) | 2015-08-31 | 2021-06-30 | KB Medical SA | Robotic surgical systems |
| US10034716B2 (en) | 2015-09-14 | 2018-07-31 | Globus Medical, Inc. | Surgical robotic systems and methods thereof |
| US9771092B2 (en) | 2015-10-13 | 2017-09-26 | Globus Medical, Inc. | Stabilizer wheel assembly and methods of use |
| ITUB20155057A1 (it) * | 2015-10-16 | 2017-04-16 | Medical Microinstruments S R L | Assieme robotico di chirurgia |
| US10143526B2 (en) | 2015-11-30 | 2018-12-04 | Auris Health, Inc. | Robot-assisted driving systems and methods |
| US20190008598A1 (en) * | 2015-12-07 | 2019-01-10 | M.S.T. Medical Surgery Technologies Ltd. | Fully autonomic artificial intelligence robotic system |
| CN106859768B (zh) * | 2015-12-11 | 2019-11-12 | 上海工程技术大学 | 用于腹腔微创手术的解耦四自由度远心机构 |
| CN105629880B (zh) * | 2015-12-22 | 2018-09-07 | 哈尔滨工业大学 | 用于具有三角形远心点机构的串联机械臂逆运动学数值解法 |
| CN105345812A (zh) * | 2015-12-24 | 2016-02-24 | 哈尔滨工业大学 | 能够实现部分解耦的空间平动并联机构 |
| CN108289719B (zh) | 2016-01-20 | 2021-09-14 | 直观外科手术操作公司 | 快速暂停和恢复医疗设备可重新定位臂中的运动偏离的系统和方法 |
| US10842453B2 (en) | 2016-02-03 | 2020-11-24 | Globus Medical, Inc. | Portable medical imaging system |
| US10117632B2 (en) | 2016-02-03 | 2018-11-06 | Globus Medical, Inc. | Portable medical imaging system with beam scanning collimator |
| US10448910B2 (en) | 2016-02-03 | 2019-10-22 | Globus Medical, Inc. | Portable medical imaging system |
| US11058378B2 (en) | 2016-02-03 | 2021-07-13 | Globus Medical, Inc. | Portable medical imaging system |
| US11883217B2 (en) | 2016-02-03 | 2024-01-30 | Globus Medical, Inc. | Portable medical imaging system and method |
| WO2017147353A1 (en) * | 2016-02-26 | 2017-08-31 | Covidien Lp | Robotic surgical systems and robotic arms thereof |
| US10866119B2 (en) | 2016-03-14 | 2020-12-15 | Globus Medical, Inc. | Metal detector for detecting insertion of a surgical device into a hollow tube |
| JP6598982B2 (ja) * | 2016-03-25 | 2019-10-30 | 株式会社ニコン | 内視鏡装置、内視鏡システム、及びそれらを備えた手術システム |
| WO2017165183A1 (en) * | 2016-03-25 | 2017-09-28 | Intuitive Surgical Operations, Inc. | Surgical platform supported by multiple arms |
| EP3241518B1 (en) | 2016-04-11 | 2024-10-23 | Globus Medical, Inc | Surgical tool systems |
| CN105963017B (zh) * | 2016-04-12 | 2018-08-24 | 浙江大学 | 一种空间多自由度手术辅助手臂机构 |
| CN105751197B (zh) * | 2016-04-26 | 2017-10-03 | 哈尔滨工程大学 | 一种用于主从姿态控制的辅助机构及控制方法 |
| JP7176757B2 (ja) | 2016-05-18 | 2022-11-22 | バーチャル インシジョン コーポレイション | ロボット手術装置、システム及び関連する方法 |
| AU2017269374B2 (en) | 2016-05-26 | 2021-07-08 | Covidien Lp | Instrument drive units |
| CA3022165A1 (en) | 2016-05-26 | 2017-11-30 | Covidien Lp | Robotic surgical assemblies and instrument drive units thereof |
| US11272992B2 (en) | 2016-06-03 | 2022-03-15 | Covidien Lp | Robotic surgical assemblies and instrument drive units thereof |
| KR20230167129A (ko) | 2016-07-14 | 2023-12-07 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 컴퓨터 보조 원격조작 시스템에서의 2차 기구 제어 |
| CN106137398A (zh) * | 2016-07-29 | 2016-11-23 | 苏州高通机械科技有限公司 | 一种脊柱手术用机械手 |
| CN116269696A (zh) | 2016-08-25 | 2023-06-23 | 内布拉斯加大学董事会 | 快速释放工具耦接器以及相关系统和方法 |
| TWI621511B (zh) * | 2016-08-26 | 2018-04-21 | 卓昂滄 | 實施料理翻炒動作之機械手臂 |
| EP3507065A4 (en) | 2016-08-30 | 2020-04-29 | Board of Regents of the University of Nebraska | ROBOTIC DEVICE HAVING COMPACT ARTICULATION DESIGN AND ADDITIONAL DEGREE OF FREEDOM, AND RELATED SYSTEMS AND METHODS |
| WO2018053360A1 (en) | 2016-09-16 | 2018-03-22 | Verb Surgical Inc. | Belt termination and tensioning in a pulley arrangement for a robotic arm |
| US11389360B2 (en) * | 2016-09-16 | 2022-07-19 | Verb Surgical Inc. | Linkage mechanisms for mounting robotic arms to a surgical table |
| CA3034639C (en) | 2016-09-16 | 2021-03-23 | Verb Surgical Inc. | Robotic arms |
| JP6833980B2 (ja) * | 2016-09-16 | 2021-02-24 | バーブ サージカル インコーポレイテッドVerb Surgical Inc. | ロボットアームを外科用テーブルに取り付けるためのテーブルアダプタ |
| EP3513300A4 (en) | 2016-09-16 | 2020-06-03 | Verb Surgical Inc. | SENSOR WITH MULTIPLE DEGREE OF FREEDOM |
| CN106236276B (zh) * | 2016-09-28 | 2019-09-17 | 微创(上海)医疗机器人有限公司 | 手术机器人系统 |
| US9931025B1 (en) | 2016-09-30 | 2018-04-03 | Auris Surgical Robotics, Inc. | Automated calibration of endoscopes with pull wires |
| US20200008890A1 (en) * | 2016-10-04 | 2020-01-09 | Imperial Innovations Limited | Coupling for a robotic surgical instrument |
| JP6382906B2 (ja) * | 2016-10-17 | 2018-08-29 | ファナック株式会社 | ロボット及びロボットにおける表示灯の設置方法 |
| GB2568616B (en) * | 2016-11-01 | 2019-12-25 | Bio Medical Eng Hk Ltd | Surgical robotic devices and systems for use in performing minimally invasive and natural orifice transluminal endoscopic surgical actions |
| JP2018075689A (ja) * | 2016-11-11 | 2018-05-17 | Ntn株式会社 | 作動装置および双腕型作動装置 |
| CN115337111A (zh) | 2016-11-22 | 2022-11-15 | 内布拉斯加大学董事会 | 改进的粗定位装置及相关系统和方法 |
| US10675110B2 (en) | 2016-11-29 | 2020-06-09 | Virtual Incision Corporation | User controller with user presence detection and related systems and methods |
| WO2018112199A1 (en) | 2016-12-14 | 2018-06-21 | Virtual Incision Corporation | Releasable attachment device for coupling to medical devices and related systems and methods |
| CN106584445B (zh) | 2016-12-16 | 2018-12-25 | 微创(上海)医疗机器人有限公司 | 不动点机构 |
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| EP3360502A3 (en) | 2017-01-18 | 2018-10-31 | KB Medical SA | Robotic navigation of robotic surgical systems |
| CA3051258A1 (en) | 2017-02-09 | 2018-08-16 | Vicarious Surgical Inc. | Virtual reality surgical tools system |
| US10624738B2 (en) * | 2017-02-23 | 2020-04-21 | Edwards Lifesciences Corporation | Heart valve manufacturing devices and methods |
| CN106625615B (zh) * | 2017-03-02 | 2024-02-27 | 上海未来伙伴机器人有限公司 | 一种骨骼件及机器人 |
| US11071594B2 (en) | 2017-03-16 | 2021-07-27 | KB Medical SA | Robotic navigation of robotic surgical systems |
| CN107157582B (zh) * | 2017-04-25 | 2019-05-07 | 山东科技大学 | 一种鼻腔手术辅助持镜机器人 |
| CN107157583A (zh) * | 2017-05-04 | 2017-09-15 | 哈尔滨思哲睿智能医疗设备有限公司 | 一种吊顶式腹腔镜手术机器人 |
| US11529129B2 (en) | 2017-05-12 | 2022-12-20 | Auris Health, Inc. | Biopsy apparatus and system |
| US10913145B2 (en) * | 2017-06-20 | 2021-02-09 | Verb Surgical Inc. | Cart for robotic arms and method and apparatus for cartridge or magazine loading of arms |
| CN109091236B (zh) * | 2017-06-21 | 2020-08-21 | 山东威高手术机器人有限公司 | 一种微创手术器械辅助操作臂 |
| CN109091230B (zh) * | 2017-06-21 | 2020-12-18 | 山东威高手术机器人有限公司 | 一种微创手术主操作臂 |
| CN107361859B (zh) * | 2017-06-26 | 2024-02-27 | 苏州铸正机器人有限公司 | 一种辅助脊柱微创手术定位系统 |
| AU2018290831A1 (en) | 2017-06-28 | 2019-12-19 | Auris Health, Inc. | Instrument insertion compensation |
| US10426559B2 (en) | 2017-06-30 | 2019-10-01 | Auris Health, Inc. | Systems and methods for medical instrument compression compensation |
| US11135015B2 (en) | 2017-07-21 | 2021-10-05 | Globus Medical, Inc. | Robot surgical platform |
| CN107320191B (zh) * | 2017-07-31 | 2021-10-15 | 成都博恩思医学机器人有限公司 | 传动组件、手术机器人的手术器械及手术机器人 |
| DE102017118126A1 (de) * | 2017-08-09 | 2019-02-14 | avateramedical GmBH | Robotisches Operationssystem |
| WO2019039006A1 (ja) * | 2017-08-23 | 2019-02-28 | ソニー株式会社 | ロボット |
| CA3075692A1 (en) | 2017-09-14 | 2019-03-21 | Vicarious Surgical Inc. | Virtual reality surgical camera system |
| JP7405432B2 (ja) | 2017-09-27 | 2023-12-26 | バーチャル インシジョン コーポレイション | 追跡カメラ技術を有するロボット手術デバイスならびに関連するシステムおよび方法 |
| US10145747B1 (en) | 2017-10-10 | 2018-12-04 | Auris Health, Inc. | Detection of undesirable forces on a surgical robotic arm |
| US11794338B2 (en) | 2017-11-09 | 2023-10-24 | Globus Medical Inc. | Robotic rod benders and related mechanical and motor housings |
| JP6778242B2 (ja) | 2017-11-09 | 2020-10-28 | グローバス メディカル インコーポレイティッド | 手術用ロッドを曲げるための手術用ロボットシステム、および関連する方法および装置 |
| US11382666B2 (en) | 2017-11-09 | 2022-07-12 | Globus Medical Inc. | Methods providing bend plans for surgical rods and related controllers and computer program products |
| US11134862B2 (en) | 2017-11-10 | 2021-10-05 | Globus Medical, Inc. | Methods of selecting surgical implants and related devices |
| WO2019113249A1 (en) | 2017-12-06 | 2019-06-13 | Auris Health, Inc. | Systems and methods to correct for uncommanded instrument roll |
| US11510736B2 (en) | 2017-12-14 | 2022-11-29 | Auris Health, Inc. | System and method for estimating instrument location |
| CN108056823B (zh) * | 2017-12-27 | 2020-09-22 | 微创(上海)医疗机器人有限公司 | 手术机器人终端 |
| CN108186120B (zh) * | 2017-12-27 | 2020-12-04 | 微创(上海)医疗机器人有限公司 | 手术机器人终端 |
| JP2019118619A (ja) * | 2017-12-29 | 2019-07-22 | 株式会社三洋物産 | 遊技機 |
| JP2019118620A (ja) * | 2017-12-29 | 2019-07-22 | 株式会社三洋物産 | 遊技機 |
| AU2019205201B2 (en) | 2018-01-04 | 2020-11-05 | Covidien Lp | Systems and assemblies for mounting a surgical accessory to robotic surgical systems, and providing access therethrough |
| CN111770816B (zh) | 2018-01-05 | 2023-11-03 | 内布拉斯加大学董事会 | 具有紧凑型关节设计的单臂机器人装置及相关系统和方法 |
| CN108031827B (zh) * | 2018-01-08 | 2024-03-22 | 安徽理工大学 | 铸造用辅助作业机器人 |
| MX2020007623A (es) | 2018-01-17 | 2020-09-14 | Auris Health Inc | Plataforma quirurgica con soportes de brazo regulable. |
| JP7301884B2 (ja) | 2018-02-13 | 2023-07-03 | オーリス ヘルス インコーポレイテッド | 医療用器具を駆動するためのシステム及び方法 |
| US20190254753A1 (en) | 2018-02-19 | 2019-08-22 | Globus Medical, Inc. | Augmented reality navigation systems for use with robotic surgical systems and methods of their use |
| CN108433812B (zh) * | 2018-03-09 | 2024-08-20 | 山东大学齐鲁医院 | 一种具有移动定位关节的单孔手术机器人的整体布局结构 |
| US10573023B2 (en) | 2018-04-09 | 2020-02-25 | Globus Medical, Inc. | Predictive visualization of medical imaging scanner component movement |
| CN110384555B (zh) * | 2018-04-19 | 2021-03-12 | 中国科学院深圳先进技术研究院 | 基于远端中心运动机构的持镜手术机器人 |
| CN109330696B (zh) * | 2018-07-31 | 2023-06-16 | 深圳市精锋医疗科技股份有限公司 | 可调节从操作设备组件及手术机器人 |
| CN109009443A (zh) * | 2018-08-15 | 2018-12-18 | 苏州大学张家港工业技术研究院 | 腹腔微创外科手术机器人 |
| CN109009437B (zh) * | 2018-09-08 | 2024-05-03 | 安徽埃克索医疗机器人有限公司 | 一种手术导航机器人末端连接方法 |
| CN108908315A (zh) * | 2018-09-17 | 2018-11-30 | 深圳市越疆科技有限公司 | 小臂和多关节机器人 |
| JP7427654B2 (ja) | 2018-09-17 | 2024-02-05 | オーリス ヘルス インコーポレイテッド | 付随する医療処置を行うためのシステム及び方法 |
| JP6902639B2 (ja) * | 2018-09-25 | 2021-07-14 | 株式会社メディカロイド | 手術システム |
| JP6856594B2 (ja) | 2018-09-25 | 2021-04-07 | 株式会社メディカロイド | 手術システムおよび表示方法 |
| US12076100B2 (en) | 2018-09-28 | 2024-09-03 | Auris Health, Inc. | Robotic systems and methods for concomitant endoscopic and percutaneous medical procedures |
| WO2020069430A1 (en) | 2018-09-28 | 2020-04-02 | Auris Health, Inc. | Systems and methods for docking medical instruments |
| US11648067B2 (en) | 2018-10-05 | 2023-05-16 | Kawasaki Jukogyo Kabushiki Kaisha | Medical manipulator and surgical system including the same |
| JP7182126B2 (ja) | 2018-10-11 | 2022-12-02 | 株式会社メディカロイド | ロボット手術支援装置、ロボット手術支援方法、及びプログラム |
| JP7152240B2 (ja) | 2018-10-11 | 2022-10-12 | 株式会社メディカロイド | ロボット手術支援装置、ロボット手術支援方法、及びプログラム |
| CN109481021B (zh) * | 2018-10-25 | 2021-11-16 | 天津大学 | 模式重构型微创手术机器人从手系统 |
| US11337742B2 (en) | 2018-11-05 | 2022-05-24 | Globus Medical Inc | Compliant orthopedic driver |
| US20210386490A1 (en) * | 2018-11-07 | 2021-12-16 | Covidien Lp | Surgical robotic systems |
| US11278360B2 (en) | 2018-11-16 | 2022-03-22 | Globus Medical, Inc. | End-effectors for surgical robotic systems having sealed optical components |
| US11744655B2 (en) | 2018-12-04 | 2023-09-05 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| US11602402B2 (en) | 2018-12-04 | 2023-03-14 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| WO2020118244A1 (en) * | 2018-12-07 | 2020-06-11 | Activ Surgical, Inc. | Mechanical coupling to join two collaborative robots together for means of calibration |
| CN111374777B (zh) * | 2018-12-29 | 2024-09-17 | 达科为(深圳)医疗设备有限公司 | 用于胸腹腔微创手术的主从式机器人系统及配置方法 |
| EP3908171A4 (en) | 2019-01-07 | 2022-09-14 | Virtual Incision Corporation | ROBOTIZED ASSISTED SURGICAL SYSTEM AND RELATED DEVICES AND PROCEDURES |
| JP7153335B2 (ja) | 2019-01-29 | 2022-10-14 | リバーフィールド株式会社 | 手術支援装置 |
| WO2020172097A1 (en) * | 2019-02-18 | 2020-08-27 | Covidien Lp | Setup arm pitch joint estimator |
| WO2020172394A1 (en) * | 2019-02-22 | 2020-08-27 | Auris Health, Inc. | Surgical platform with motorized arms for adjustable arm supports |
| JP2020141833A (ja) * | 2019-03-06 | 2020-09-10 | 川崎重工業株式会社 | 外科手術システムの制御方法および外科手術システム |
| EP3965710A4 (en) | 2019-03-08 | 2023-04-05 | Auris Health, Inc. | TILT MECHANISMS FOR MEDICAL SYSTEMS AND APPLICATIONS |
| US12016646B2 (en) * | 2019-03-12 | 2024-06-25 | Intuitive Surgical Operations, Inc. | Layered functionality for a user input mechanism in a computer-assisted surgical system |
| US11918313B2 (en) | 2019-03-15 | 2024-03-05 | Globus Medical Inc. | Active end effectors for surgical robots |
| CN109730778A (zh) * | 2019-03-20 | 2019-05-10 | 苏州康多机器人有限公司 | 一种双控制协同操作的腹腔镜手术机器人及系统 |
| US11419616B2 (en) | 2019-03-22 | 2022-08-23 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11317978B2 (en) | 2019-03-22 | 2022-05-03 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US20200297357A1 (en) | 2019-03-22 | 2020-09-24 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11806084B2 (en) | 2019-03-22 | 2023-11-07 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| US11571265B2 (en) | 2019-03-22 | 2023-02-07 | Globus Medical Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11382549B2 (en) | 2019-03-22 | 2022-07-12 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| US11045179B2 (en) | 2019-05-20 | 2021-06-29 | Global Medical Inc | Robot-mounted retractor system |
| US11628023B2 (en) | 2019-07-10 | 2023-04-18 | Globus Medical, Inc. | Robotic navigational system for interbody implants |
| CN110393587B (zh) * | 2019-08-30 | 2024-08-30 | 山东威高手术机器人有限公司 | 机械臂转动关节及医生机械臂 |
| US11571171B2 (en) | 2019-09-24 | 2023-02-07 | Globus Medical, Inc. | Compound curve cable chain |
| US11426178B2 (en) | 2019-09-27 | 2022-08-30 | Globus Medical Inc. | Systems and methods for navigating a pin guide driver |
| US11890066B2 (en) | 2019-09-30 | 2024-02-06 | Globus Medical, Inc | Surgical robot with passive end effector |
| US11864857B2 (en) | 2019-09-27 | 2024-01-09 | Globus Medical, Inc. | Surgical robot with passive end effector |
| US11510684B2 (en) | 2019-10-14 | 2022-11-29 | Globus Medical, Inc. | Rotary motion passive end effector for surgical robots in orthopedic surgeries |
| US11992373B2 (en) | 2019-12-10 | 2024-05-28 | Globus Medical, Inc | Augmented reality headset with varied opacity for navigated robotic surgery |
| US12133772B2 (en) | 2019-12-10 | 2024-11-05 | Globus Medical, Inc. | Augmented reality headset for navigated robotic surgery |
| US12064189B2 (en) | 2019-12-13 | 2024-08-20 | Globus Medical, Inc. | Navigated instrument for use in robotic guided surgery |
| KR20220123076A (ko) | 2019-12-31 | 2022-09-05 | 아우리스 헬스, 인코포레이티드 | 경피 접근을 위한 정렬 기법 |
| WO2021137108A1 (en) | 2019-12-31 | 2021-07-08 | Auris Health, Inc. | Alignment interfaces for percutaneous access |
| KR20220123273A (ko) | 2019-12-31 | 2022-09-06 | 아우리스 헬스, 인코포레이티드 | 해부학적 특징부 식별 및 표적설정 |
| US11806105B2 (en) | 2020-01-21 | 2023-11-07 | Alcon Inc. | Vitreoretinal surgery dexterity enhancement system |
| US11382699B2 (en) | 2020-02-10 | 2022-07-12 | Globus Medical Inc. | Extended reality visualization of optical tool tracking volume for computer assisted navigation in surgery |
| US11207150B2 (en) | 2020-02-19 | 2021-12-28 | Globus Medical, Inc. | Displaying a virtual model of a planned instrument attachment to ensure correct selection of physical instrument attachment |
| CN113397710A (zh) * | 2020-03-17 | 2021-09-17 | 上海奥朋医疗科技有限公司 | 适用于血管介入手术的双平面机械臂装置 |
| US11253216B2 (en) | 2020-04-28 | 2022-02-22 | Globus Medical Inc. | Fixtures for fluoroscopic imaging systems and related navigation systems and methods |
| US11382700B2 (en) | 2020-05-08 | 2022-07-12 | Globus Medical Inc. | Extended reality headset tool tracking and control |
| US11153555B1 (en) | 2020-05-08 | 2021-10-19 | Globus Medical Inc. | Extended reality headset camera system for computer assisted navigation in surgery |
| US11510750B2 (en) | 2020-05-08 | 2022-11-29 | Globus Medical, Inc. | Leveraging two-dimensional digital imaging and communication in medicine imagery in three-dimensional extended reality applications |
| WO2021245748A1 (ja) * | 2020-06-01 | 2021-12-09 | リバーフィールド株式会社 | 手術支援装置 |
| US12070276B2 (en) | 2020-06-09 | 2024-08-27 | Globus Medical Inc. | Surgical object tracking in visible light via fiducial seeding and synthetic image registration |
| US11317973B2 (en) | 2020-06-09 | 2022-05-03 | Globus Medical, Inc. | Camera tracking bar for computer assisted navigation during surgery |
| US11382713B2 (en) | 2020-06-16 | 2022-07-12 | Globus Medical, Inc. | Navigated surgical system with eye to XR headset display calibration |
| US11197725B1 (en) | 2020-06-19 | 2021-12-14 | Remedy Robotics, Inc. | Systems and methods for guidance of intraluminal devices within the vasculature |
| US11877807B2 (en) | 2020-07-10 | 2024-01-23 | Globus Medical, Inc | Instruments for navigated orthopedic surgeries |
| US11793588B2 (en) | 2020-07-23 | 2023-10-24 | Globus Medical, Inc. | Sterile draping of robotic arms |
| EP4203835A4 (en) * | 2020-08-26 | 2024-09-04 | Auris Health Inc | ROBOTIC CONTROLLED FIELD GENERATORS |
| US11737831B2 (en) | 2020-09-02 | 2023-08-29 | Globus Medical Inc. | Surgical object tracking template generation for computer assisted navigation during surgical procedure |
| US11523785B2 (en) | 2020-09-24 | 2022-12-13 | Globus Medical, Inc. | Increased cone beam computed tomography volume length without requiring stitching or longitudinal C-arm movement |
| CN114305692A (zh) * | 2020-09-29 | 2022-04-12 | 北京术锐技术有限公司 | 一种手术机器人系统线架支撑装置 |
| US11911112B2 (en) | 2020-10-27 | 2024-02-27 | Globus Medical, Inc. | Robotic navigational system |
| US12076091B2 (en) | 2020-10-27 | 2024-09-03 | Globus Medical, Inc. | Robotic navigational system |
| US11941814B2 (en) | 2020-11-04 | 2024-03-26 | Globus Medical Inc. | Auto segmentation using 2-D images taken during 3-D imaging spin |
| EP4247287A4 (en) * | 2020-11-18 | 2024-09-25 | Auris Health Inc | SYSTEMS AND METHODS FOR IMPROVING EXTERNAL WORKSPACE IN ROBOTIC SURGICAL SYSTEMS |
| USD1022197S1 (en) | 2020-11-19 | 2024-04-09 | Auris Health, Inc. | Endoscope |
| USD1028250S1 (en) * | 2020-11-19 | 2024-05-21 | Auris Health, Inc. | Viewer of a physician console |
| WO2022104771A1 (zh) * | 2020-11-23 | 2022-05-27 | 诺创智能医疗科技(杭州)有限公司 | 手术机器人 |
| US11717350B2 (en) | 2020-11-24 | 2023-08-08 | Globus Medical Inc. | Methods for robotic assistance and navigation in spinal surgery and related systems |
| CN112548897A (zh) * | 2020-12-01 | 2021-03-26 | 邵清平 | 一种可进行多向调节且精准度高的机械加工用定位机构 |
| US12070286B2 (en) | 2021-01-08 | 2024-08-27 | Globus Medical, Inc | System and method for ligament balancing with robotic assistance |
| CN113017840B (zh) * | 2021-02-26 | 2022-07-26 | 武汉联影智融医疗科技有限公司 | 主操作手及手术机器人 |
| CN112847317B (zh) * | 2021-03-22 | 2023-05-26 | 四川大学 | 一种三维空间二自由度远心点运动并联机构 |
| US12121307B2 (en) | 2021-07-01 | 2024-10-22 | Remedy Robotics, Inc. | Vision-based position and orientation determination for endovascular tools |
| US11690683B2 (en) | 2021-07-01 | 2023-07-04 | Remedy Robotics, Inc | Vision-based position and orientation determination for endovascular tools |
| US11707332B2 (en) | 2021-07-01 | 2023-07-25 | Remedy Robotics, Inc. | Image space control for endovascular tools |
| US11857273B2 (en) | 2021-07-06 | 2024-01-02 | Globus Medical, Inc. | Ultrasonic robotic surgical navigation |
| US11439444B1 (en) | 2021-07-22 | 2022-09-13 | Globus Medical, Inc. | Screw tower and rod reduction tool |
| KR20240038911A (ko) * | 2021-08-06 | 2024-03-26 | 주식회사 리브스메드 | 수술용 로봇 암 |
| CN113796818B (zh) * | 2021-08-27 | 2024-03-19 | 天津大学医疗机器人与智能系统研究院 | 一种力平衡器械臂 |
| CN114098996B (zh) * | 2021-11-29 | 2023-12-22 | 天津大学医疗机器人与智能系统研究院 | 器械驱动装置、器械臂、从手端及机器人辅助手术系统 |
| TW202335647A (zh) | 2021-11-30 | 2023-09-16 | 美商安督奎斯特機器人公司 | 機器人手術系統的主控制系統 |
| EP4440479A1 (en) | 2021-11-30 | 2024-10-09 | Endoquest Robotics, Inc. | Steerable overtube assemblies for robotic surgical systems |
| US11911115B2 (en) | 2021-12-20 | 2024-02-27 | Globus Medical Inc. | Flat panel registration fixture and method of using same |
| US12103480B2 (en) | 2022-03-18 | 2024-10-01 | Globus Medical Inc. | Omni-wheel cable pusher |
| US12048493B2 (en) | 2022-03-31 | 2024-07-30 | Globus Medical, Inc. | Camera tracking system identifying phantom markers during computer assisted surgery navigation |
| US11717149B1 (en) | 2022-04-27 | 2023-08-08 | Maciej J. Kieturakis | Methods and systems for robotic single-port laparoscopic access |
| WO2023229447A1 (ko) * | 2022-05-27 | 2023-11-30 | 주식회사 리브스메드 | 수술용 로봇 암 |
| CN115500951B (zh) * | 2022-10-25 | 2024-09-24 | 山东卓业医疗科技有限公司 | 一种智能微创手术机器人 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0630896A (ja) * | 1992-05-27 | 1994-02-08 | Internatl Business Mach Corp <Ibm> | 外科的治療方法及び装置 |
| JPH08275958A (ja) * | 1995-04-07 | 1996-10-22 | Olympus Optical Co Ltd | 手術用マニピュレータ装置 |
| JPH08280697A (ja) * | 1995-04-20 | 1996-10-29 | Olympus Optical Co Ltd | 手術用マニピュレータシステム |
| JPH09507131A (ja) * | 1993-09-07 | 1997-07-22 | ディーメド インターナショナル エス.アー. | 電算機支援顕微鏡外科手術のための設備と前記設備の使用法 |
| US20010013764A1 (en) * | 1998-08-04 | 2001-08-16 | Blumenkranz Steven J. | Manipulator positioning linkage for robotic surgery |
| JP2003517883A (ja) * | 1999-12-23 | 2003-06-03 | ヒル−ロム サービシズ,インコーポレイテッド | 手術シアターシステム |
| JP2003299674A (ja) * | 2002-04-12 | 2003-10-21 | Masasuke Shiraishi | 手術台装置 |
| US20030208189A1 (en) * | 2001-10-19 | 2003-11-06 | Payman Gholam A. | Integrated system for correction of vision of the human eye |
| WO2004035270A1 (ja) * | 2002-10-21 | 2004-04-29 | Thk Co., Ltd. | 位置決めユニット及びこれを用いた位置決めアーム |
| US20040261179A1 (en) * | 1999-08-03 | 2004-12-30 | Intuitive Surgical, Inc. | Ceiling and floor mounted surgical robot set-up arms |
Family Cites Families (126)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US906874A (en) | 1907-03-20 | 1908-12-15 | Fox Borden Mfg Company | Telephone-holder. |
| US1638938A (en) | 1923-04-07 | 1927-08-16 | Koenigkramer Frederick | Instrument supporting and adjusting apparatus |
| US1644231A (en) | 1924-07-21 | 1927-10-04 | Harry J Bosworth Company | Light support |
| US2090439A (en) | 1932-07-04 | 1937-08-17 | Carwardine George | Equipoising mechanism |
| US2076446A (en) | 1934-02-10 | 1937-04-06 | Terry Herbert & Sons Ltd | Equipoising mechanism |
| US2131693A (en) | 1937-03-18 | 1938-09-27 | Hinsdale Smith Jr | Projection apparatus |
| US2287577A (en) | 1940-03-15 | 1942-06-23 | Picker X Ray Corp Waite Mfg | Adjustable support |
| US2416910A (en) | 1944-08-11 | 1947-03-04 | Signode Steel Strapping Co | Package-binding tool support |
| US2547532A (en) | 1949-06-17 | 1951-04-03 | Burton Mfg Company | Jointed bracket |
| US2665102A (en) | 1950-06-26 | 1954-01-05 | Albert C Perbal | Adjustable bracket structure |
| US2700524A (en) | 1951-06-22 | 1955-01-25 | Ritter Co Inc | Counterbalanced supporting arm |
| US2834568A (en) | 1953-07-17 | 1958-05-13 | Majik Ironers Inc | Jointed supporting arms for flatirons |
| US2833504A (en) | 1954-05-17 | 1958-05-06 | Gen Lamps Mfg Corp | Adjustable weight supporting mechanism |
| US2866101A (en) | 1955-08-29 | 1958-12-23 | Westinghouse Electric Corp | X-ray apparatus |
| US2941776A (en) | 1957-05-13 | 1960-06-21 | Ritter Co Inc | Counterbalancing mechanism |
| US3000606A (en) | 1957-08-16 | 1961-09-19 | American Sterilizer Co | Balanced mounting means for a surgical lamp |
| US2910335A (en) | 1957-10-31 | 1959-10-27 | Nathaniel B Wales | Autoamtic counterbalancing system |
| US3041060A (en) | 1960-04-12 | 1962-06-26 | Jacobsen Jacob | Adjusting means for a lamp structure |
| US3122348A (en) | 1961-11-20 | 1964-02-25 | American Optical Corp | Adjustable support for instruments |
| NL296890A (ja) | 1962-08-23 | |||
| GB1002839A (en) | 1963-05-13 | 1965-09-02 | Eivind Kirkeby | A counterbalanced lamp stand |
| US3239184A (en) | 1965-02-01 | 1966-03-08 | Kirkeby Eivind | Support for lamp |
| US3374347A (en) | 1965-08-23 | 1968-03-19 | Hirose You | Electric lamp stand |
| US3426190A (en) | 1966-11-07 | 1969-02-04 | P N Luminous Equipment Co | Support arms for lamps and the like |
| US3476931A (en) | 1967-07-17 | 1969-11-04 | Milton Fletcher | Adjustable lamp structure |
| US3547390A (en) | 1968-05-31 | 1970-12-15 | Edna A Mehr | Adjustable bracket structure |
| DE1810552B2 (de) | 1968-11-23 | 1970-11-05 | Original Hanau Quarzlampen Gmbh, 6450 Hanau | Drehgelenk mit horizontaler Schwenkachse für über Federausgleich verbundene Schwenkarme, insbesondere von medizinischen Geräten |
| US3713453A (en) | 1971-04-05 | 1973-01-30 | J Chiaro | Apparatus for styling hair |
| GB1392605A (en) | 1971-09-16 | 1975-04-30 | Oram J A | Adjustable articulated support |
| US3856251A (en) | 1972-10-24 | 1974-12-24 | Nouveau Prod Corp | Self-compensating extensible beam |
| US4003536A (en) | 1973-05-11 | 1977-01-18 | Grant Hardware Company | Intravenous bottle support arm |
| US3883105A (en) | 1974-06-05 | 1975-05-13 | Reizou Matsumoto | Load handling equipment |
| US4208028A (en) | 1974-09-16 | 1980-06-17 | Garrett Brown | Support apparatus |
| US3973748A (en) | 1975-01-31 | 1976-08-10 | Konan Camera Research Institute | Sustaining device |
| JPS5258284A (en) | 1975-10-28 | 1977-05-13 | Jacobsen As J | Arm with balance spring |
| US4076351A (en) | 1976-04-19 | 1978-02-28 | Hobart Dale Wyant | Up-down cabinet |
| US4160536A (en) | 1976-10-27 | 1979-07-10 | Jac. Jacobsen A/S | Counterbalanced arm |
| US4107769A (en) | 1977-03-21 | 1978-08-15 | American Sterilizer Company | Balanced single horizontal suspension arm |
| IT1086170B (it) | 1977-07-28 | 1985-05-28 | Iguzzini Spa | Supporto a bracci articolati,in particolare per lampade |
| US4166602A (en) | 1978-05-18 | 1979-09-04 | Pennwalt Corporation | Counterbalancing mechanism for X-ray tubeheads |
| NL7809850A (nl) | 1978-09-29 | 1980-04-01 | Philips Nv | Inrichting met een uitgebalanceerde zwenkbare arm. |
| EP0024433B1 (en) | 1979-02-22 | 1983-07-27 | Kobe Steel Limited | Arm with gravity-balancing function |
| US4266747A (en) | 1979-07-26 | 1981-05-12 | Positioning Devices, Incorporated | Equipoised articulated support arm |
| JPS5952306B2 (ja) | 1979-09-11 | 1984-12-19 | 株式会社佐々木製作所 | バランサ− |
| DE3173714D1 (en) | 1980-09-18 | 1986-03-20 | Zeiss Carl Fa | Adjustable stand for optical observing units |
| EP0070434B1 (de) | 1981-07-17 | 1985-06-19 | Siemens Aktiengesellschaft | Höhenverstellbarer Parallelogrammtragarm |
| DE3243709C3 (de) | 1982-11-25 | 1994-12-15 | Delma Elektro Med App | Operationsleuchte |
| US4494177A (en) | 1983-04-20 | 1985-01-15 | Plan Hold Corp. | Articulated task lamp |
| JPS61500300A (ja) | 1983-10-31 | 1986-02-27 | コ−ズポンテイ バルト−エス ヒテルバンク ア−ルテイ−・,インノバシオス アラツプ | 張り出し長さ可変のトラス型張り出し台座 |
| DE3524120A1 (de) * | 1985-07-05 | 1987-01-08 | Teves Gmbh Alfred | Bremsschlupfgeregelte bremsanlage |
| US5078140A (en) * | 1986-05-08 | 1992-01-07 | Kwoh Yik S | Imaging device - aided robotic stereotaxis system |
| US4770384A (en) | 1986-07-28 | 1988-09-13 | Matsushita Electric Works, Ltd. | Movable stand |
| JPS6354156A (ja) | 1986-08-23 | 1988-03-08 | オリンパス光学工業株式会社 | 手術顕微鏡の俯仰装置 |
| US4744019A (en) | 1986-09-12 | 1988-05-10 | Jac Jacobsen A/S | Counterbalanced arm assembly |
| US4953822A (en) | 1987-05-26 | 1990-09-04 | Eldon Industries, Inc. | Adjustable arm structures |
| US5098426A (en) | 1989-02-06 | 1992-03-24 | Phoenix Laser Systems, Inc. | Method and apparatus for precision laser surgery |
| US5025359A (en) | 1990-03-16 | 1991-06-18 | American Sterilizer Company | Counterbalanced arm for a lighthead |
| JP2808826B2 (ja) * | 1990-05-25 | 1998-10-08 | 松下電器産業株式会社 | 基板の移し換え装置 |
| US5097400A (en) | 1991-03-29 | 1992-03-17 | Luxo Lamp Corporation | Halogen lamp |
| FI93607C (fi) * | 1991-05-24 | 1995-05-10 | John Koivukangas | Leikkaustoimenpidelaite |
| US5279309A (en) * | 1991-06-13 | 1994-01-18 | International Business Machines Corporation | Signaling device and method for monitoring positions in a surgical operation |
| US5184601A (en) * | 1991-08-05 | 1993-02-09 | Putman John M | Endoscope stabilizer |
| US5597146A (en) * | 1991-08-05 | 1997-01-28 | Putman; J. Michael | Rail-mounted stabilizer for surgical instrument |
| US5186337A (en) | 1991-08-09 | 1993-02-16 | Hill-Rom Company, Inc. | Pivoted power column |
| ATE238140T1 (de) * | 1992-01-21 | 2003-05-15 | Stanford Res Inst Int | Chirurgisches system |
| JP3273084B2 (ja) * | 1992-08-20 | 2002-04-08 | オリンパス光学工業株式会社 | 医療器具ホルダ装置 |
| US5288043A (en) | 1992-09-11 | 1994-02-22 | Tigliev George S | Balanced suspension system for surgical microscope |
| US5397323A (en) * | 1992-10-30 | 1995-03-14 | International Business Machines Corporation | Remote center-of-motion robot for surgery |
| US5340072A (en) | 1993-02-02 | 1994-08-23 | A-Dec, Inc. | Linkage assembly for mechanical arm |
| US5348260A (en) | 1993-02-08 | 1994-09-20 | Hughes Aircraft Company | Movable supporting arm |
| US6406472B1 (en) * | 1993-05-14 | 2002-06-18 | Sri International, Inc. | Remote center positioner |
| DE69417229T2 (de) * | 1993-05-14 | 1999-07-08 | Sri International, Menlo Park, Calif. | Chirurgiegerät |
| JP2005007189A (ja) * | 1993-12-22 | 2005-01-13 | Olympus Corp | 手術器具保持装置 |
| JP3539645B2 (ja) * | 1995-02-16 | 2004-07-07 | 株式会社日立製作所 | 遠隔手術支援装置 |
| JP3628742B2 (ja) * | 1995-02-22 | 2005-03-16 | オリンパス株式会社 | 医療用マニピュレータ |
| US5618090A (en) | 1995-05-12 | 1997-04-08 | Medaes, Inc. | Movable hospital room equipment column |
| US5820623A (en) * | 1995-06-20 | 1998-10-13 | Ng; Wan Sing | Articulated arm for medical procedures |
| CN1155833A (zh) * | 1995-06-20 | 1997-07-30 | 伍云升 | 用于医疗处理的活节机械手 |
| US5609316A (en) | 1995-09-05 | 1997-03-11 | Tigliev; George S. | Suspension system for surgical microscope |
| US5855583A (en) * | 1996-02-20 | 1999-01-05 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US5792135A (en) * | 1996-05-20 | 1998-08-11 | Intuitive Surgical, Inc. | Articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US6364888B1 (en) * | 1996-09-09 | 2002-04-02 | Intuitive Surgical, Inc. | Alignment of master and slave in a minimally invasive surgical apparatus |
| US6331181B1 (en) * | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US6158843A (en) | 1997-03-28 | 2000-12-12 | Lexmark International, Inc. | Ink jet printer nozzle plates with ink filtering projections |
| JP3230453B2 (ja) * | 1997-03-31 | 2001-11-19 | 日本鋼管株式会社 | 大型構造物の溶接ロボット装置 |
| CN1100516C (zh) * | 1997-08-27 | 2003-02-05 | 北京航空航天大学 | 机器人脑外科设备系统及其所采用的图象和坐标处理方法 |
| EP2362284B1 (en) * | 1997-09-19 | 2015-05-20 | Massachusetts Institute Of Technology | Robotic apparatus |
| US6714839B2 (en) * | 1998-12-08 | 2004-03-30 | Intuitive Surgical, Inc. | Master having redundant degrees of freedom |
| DE19742050B4 (de) | 1997-09-24 | 2008-07-31 | Carl Zeiss | Stativ mit Gewichtsausgleich |
| US6012821A (en) | 1998-03-30 | 2000-01-11 | Hill-Rom, Inc. | Support arm for surgical light apparatus |
| US6659939B2 (en) * | 1998-11-20 | 2003-12-09 | Intuitive Surgical, Inc. | Cooperative minimally invasive telesurgical system |
| US6522906B1 (en) * | 1998-12-08 | 2003-02-18 | Intuitive Surgical, Inc. | Devices and methods for presenting and regulating auxiliary information on an image display of a telesurgical system to assist an operator in performing a surgical procedure |
| US6368332B1 (en) * | 1999-03-08 | 2002-04-09 | Septimiu Edmund Salcudean | Motion tracking platform for relative motion cancellation for surgery |
| US6594552B1 (en) * | 1999-04-07 | 2003-07-15 | Intuitive Surgical, Inc. | Grip strength with tactile feedback for robotic surgery |
| US6424885B1 (en) * | 1999-04-07 | 2002-07-23 | Intuitive Surgical, Inc. | Camera referenced control in a minimally invasive surgical apparatus |
| US7594912B2 (en) | 2004-09-30 | 2009-09-29 | Intuitive Surgical, Inc. | Offset remote center manipulator for robotic surgery |
| JP3806273B2 (ja) * | 1999-09-17 | 2006-08-09 | 株式会社ジェイテクト | 四自由度パラレルロボット |
| US6702805B1 (en) * | 1999-11-12 | 2004-03-09 | Microdexterity Systems, Inc. | Manipulator |
| JP3766252B2 (ja) * | 2000-02-16 | 2006-04-12 | アルプス電気株式会社 | スイッチ装置 |
| JP4222706B2 (ja) * | 2000-03-22 | 2009-02-12 | オリンパス株式会社 | 医療用器具保持装置 |
| FR2812807B1 (fr) * | 2000-08-08 | 2002-11-15 | Alm | Table d'operation, destinee notamment a des interventions chirurgicales |
| AU2002248360A1 (en) * | 2001-01-16 | 2002-08-19 | Microdexterity Systems, Inc. | Surgical manipulator |
| US6821259B2 (en) | 2001-07-30 | 2004-11-23 | The Nemours Foundation | Orthosis device |
| US7289315B2 (en) | 2001-11-08 | 2007-10-30 | Apple Inc. | Computer controlled display device |
| JP2005516786A (ja) * | 2002-02-06 | 2005-06-09 | ザ ジョンズ ホプキンズ ユニバーシティ | 遠隔動心ロボットシステムおよび方法 |
| EP1528896A1 (en) | 2002-05-28 | 2005-05-11 | Calabrian High Tech S.r.l. | Navigator-robot for surgical procedures |
| US7155316B2 (en) * | 2002-08-13 | 2006-12-26 | Microbotics Corporation | Microsurgical robot system |
| CN1206082C (zh) * | 2002-11-29 | 2005-06-15 | 东南大学 | 6自由度通用型异构式机器人手控器 |
| EP1605886B1 (en) * | 2003-03-18 | 2011-04-27 | Hill-Rom Services, Inc. | Radial arm system for patient care equipment |
| ATE308013T1 (de) * | 2003-04-29 | 2005-11-15 | Trumpf Kreuzer Med Sys Gmbh | Schwenkarm eines deckenstativs |
| CN1190171C (zh) * | 2003-05-28 | 2005-02-23 | 天津大学 | 用于显微外科手术机器人中的机械臂 |
| US7252133B2 (en) | 2004-05-04 | 2007-08-07 | Albany International Corp. | High load operation of an industrial roll door |
| US7837674B2 (en) | 2005-01-24 | 2010-11-23 | Intuitive Surgical Operations, Inc. | Compact counter balance for robotic surgical systems |
| US7763015B2 (en) * | 2005-01-24 | 2010-07-27 | Intuitive Surgical Operations, Inc. | Modular manipulator support for robotic surgery |
| US8273076B2 (en) * | 2005-06-30 | 2012-09-25 | Intuitive Surgical Operations, Inc. | Indicator for tool state and communication in multi-arm robotic telesurgery |
| KR101298492B1 (ko) * | 2005-06-30 | 2013-08-21 | 인튜어티브 서지컬 인코포레이티드 | 멀티암 로보트 원격 외과수술에서 툴 상태에 대한인디케이터와 통신 |
| JP4759104B2 (ja) | 2005-08-26 | 2011-08-31 | 株式会社ユネクス | センサ保持装置 |
| US8672922B2 (en) * | 2005-12-20 | 2014-03-18 | Intuitive Surgical Operations, Inc. | Wireless communication in a robotic surgical system |
| JP5101519B2 (ja) * | 2005-12-20 | 2012-12-19 | インテュイティブ サージカル インコーポレイテッド | ロボット手術システムの機器インターフェース |
| US7453227B2 (en) * | 2005-12-20 | 2008-11-18 | Intuitive Surgical, Inc. | Medical robotic system with sliding mode control |
| EP2217412B1 (en) | 2007-09-26 | 2014-07-02 | Robarts Research Institute | Counterbalance assembly |
| JP5350675B2 (ja) * | 2008-05-15 | 2013-11-27 | オリンパスメディカルシステムズ株式会社 | 医療用保持装置 |
| US8126114B2 (en) * | 2008-09-12 | 2012-02-28 | Accuray Incorporated | Seven or more degrees of freedom robotic manipulator having at least one redundant joint |
| US10371411B2 (en) * | 2009-10-22 | 2019-08-06 | Nortek Air Solutions, Llc | Ceiling system with integrated equipment support structure |
| CN101708611B (zh) * | 2009-11-09 | 2011-07-27 | 天津大学 | 一种具有三维平动一维转动的并联机构 |
| US20110282357A1 (en) * | 2010-05-14 | 2011-11-17 | Intuitive Surgical Operations, Inc. | Surgical system architecture |
-
2005
- 2005-01-24 US US11/043,688 patent/US7763015B2/en not_active Expired - Fee Related
-
2006
- 2006-01-24 CN CN201210041107.1A patent/CN102579133B/zh active Active
- 2006-01-24 EP EP11160060.7A patent/EP2329790B1/en active Active
- 2006-01-24 CN CN201410321165.9A patent/CN104042347B/zh active Active
- 2006-01-24 EP EP12185109.1A patent/EP2537483B1/en active Active
- 2006-01-24 CN CN2006800030034A patent/CN101106952B/zh active Active
- 2006-01-24 EP EP10182817.6A patent/EP2263591B1/en active Active
- 2006-01-24 CN CN201910723516.1A patent/CN110432987B/zh active Active
- 2006-01-24 CN CN201410814964.XA patent/CN104586507B/zh active Active
- 2006-01-24 CN CN201210299557.0A patent/CN102813553B/zh active Active
- 2006-01-24 WO PCT/US2006/002628 patent/WO2006079108A1/en active Application Filing
- 2006-01-24 EP EP06719471A patent/EP1841379B1/en active Active
- 2006-01-24 CN CN201610576433.0A patent/CN106214259B/zh active Active
- 2006-01-24 EP EP10182807.7A patent/EP2263590B1/en active Active
- 2006-01-24 EP EP18188096.4A patent/EP3427685B1/en active Active
- 2006-01-24 CN CN201110271360.1A patent/CN102415915B/zh active Active
- 2006-01-24 CN CN2009101728848A patent/CN101664339B/zh active Active
- 2006-01-24 JP JP2007552394A patent/JP2008528130A/ja not_active Withdrawn
-
2009
- 2009-01-29 US US12/362,299 patent/US8348931B2/en active Active
-
2011
- 2011-09-16 JP JP2011203738A patent/JP5500734B2/ja active Active
- 2011-09-16 JP JP2011203739A patent/JP5622694B2/ja active Active
-
2012
- 2012-03-27 JP JP2012071972A patent/JP5730233B2/ja active Active
- 2012-07-11 US US13/546,249 patent/US8834489B2/en not_active Expired - Fee Related
- 2012-12-06 US US13/706,738 patent/US9023060B2/en active Active
-
2013
- 2013-10-01 JP JP2013206099A patent/JP6170399B2/ja active Active
-
2014
- 2014-05-07 US US14/271,763 patent/US9968405B2/en active Active
- 2014-05-09 JP JP2014097355A patent/JP6444055B2/ja active Active
- 2014-08-25 JP JP2014170133A patent/JP6185893B2/ja active Active
-
2015
- 2015-10-01 JP JP2015196043A patent/JP6277165B2/ja active Active
-
2018
- 2018-05-14 US US15/978,357 patent/US10898281B2/en active Active
- 2018-09-13 JP JP2018171302A patent/JP6935376B2/ja active Active
-
2020
- 2020-05-14 JP JP2020085248A patent/JP2020124596A/ja active Pending
- 2020-12-22 US US17/130,910 patent/US20210106394A1/en not_active Abandoned
-
2021
- 2021-10-20 JP JP2021171954A patent/JP2022009321A/ja active Pending
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0630896A (ja) * | 1992-05-27 | 1994-02-08 | Internatl Business Mach Corp <Ibm> | 外科的治療方法及び装置 |
| JPH09507131A (ja) * | 1993-09-07 | 1997-07-22 | ディーメド インターナショナル エス.アー. | 電算機支援顕微鏡外科手術のための設備と前記設備の使用法 |
| JPH08275958A (ja) * | 1995-04-07 | 1996-10-22 | Olympus Optical Co Ltd | 手術用マニピュレータ装置 |
| JPH08280697A (ja) * | 1995-04-20 | 1996-10-29 | Olympus Optical Co Ltd | 手術用マニピュレータシステム |
| US20010013764A1 (en) * | 1998-08-04 | 2001-08-16 | Blumenkranz Steven J. | Manipulator positioning linkage for robotic surgery |
| US20040261179A1 (en) * | 1999-08-03 | 2004-12-30 | Intuitive Surgical, Inc. | Ceiling and floor mounted surgical robot set-up arms |
| JP2003517883A (ja) * | 1999-12-23 | 2003-06-03 | ヒル−ロム サービシズ,インコーポレイテッド | 手術シアターシステム |
| US20030208189A1 (en) * | 2001-10-19 | 2003-11-06 | Payman Gholam A. | Integrated system for correction of vision of the human eye |
| JP2003299674A (ja) * | 2002-04-12 | 2003-10-21 | Masasuke Shiraishi | 手術台装置 |
| WO2004035270A1 (ja) * | 2002-10-21 | 2004-04-29 | Thk Co., Ltd. | 位置決めユニット及びこれを用いた位置決めアーム |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017098708A1 (ja) | 2015-12-11 | 2017-06-15 | 川崎重工業株式会社 | 外科手術システム |
| KR20180090351A (ko) | 2015-12-11 | 2018-08-10 | 카와사키 주코교 카부시키 카이샤 | 외과수술 시스템 |
| KR20180090350A (ko) | 2015-12-11 | 2018-08-10 | 카와사키 주코교 카부시키 카이샤 | 외과수술 시스템, 매니퓰레이터 암 및 매니퓰레이터 암 지지체 |
| WO2020183740A1 (ja) | 2019-03-12 | 2020-09-17 | 功祐 氏平 | 低侵襲性手術機器 |
| US11642148B2 (en) | 2019-03-12 | 2023-05-09 | Kosuke Ujihira | Minimally-invasive surgery equipment |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6185893B2 (ja) | ロボット手術のためのモジュールマニピュレーター支持体 | |
| JP5649143B2 (ja) | オフセット遠隔中心マニピュレーター | |
| JP2014028296A5 (ja) | ||
| JP2016000360A5 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130619 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130918 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130924 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131001 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140120 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140818 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141107 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20141118 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20141205 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20141211 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20141211 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150127 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150310 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150407 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5730233 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |