JP2011091563A - Receiver - Google Patents
Receiver Download PDFInfo
- Publication number
- JP2011091563A JP2011091563A JP2009242618A JP2009242618A JP2011091563A JP 2011091563 A JP2011091563 A JP 2011091563A JP 2009242618 A JP2009242618 A JP 2009242618A JP 2009242618 A JP2009242618 A JP 2009242618A JP 2011091563 A JP2011091563 A JP 2011091563A
- Authority
- JP
- Japan
- Prior art keywords
- signal
- subcarrier
- noise
- point
- noise component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Landscapes
- Circuits Of Receivers In General (AREA)
Abstract
Description
本発明は、信号を受信する受信装置に関し、特に、直交周波数多重分割(Orthogonal Frequency Division Multiplexing;以下、OFDMともいう)を用いて送信された信号を受信する受信装置に関する。 The present invention relates to a receiving apparatus that receives a signal, and more particularly, to a receiving apparatus that receives a signal transmitted using orthogonal frequency division multiplexing (hereinafter also referred to as OFDM).
互いに直交する多数のサブキャリアを多重化するOFDM方式が、様々な通信システムにおいて利用されている。OFDM方式を利用した通信システムの一種では、日本の地上波デジタル放送の採用規格:ISDB−T(Integrated Services Digital Broadcasting - Terrestrial)のように、既知の固定パターンを有する基準信号がOFDM信号に挿入されることがある。この基準信号は、一般に、パイロット信号と呼ばれる。 An OFDM system that multiplexes many subcarriers orthogonal to each other is used in various communication systems. In a type of communication system using the OFDM system, a reference signal having a known fixed pattern is inserted into an OFDM signal, such as ISDB-T (Integrated Services Digital Broadcasting-Terrestrial), which is a standard adopted by Japanese terrestrial digital broadcasting. Sometimes. This reference signal is generally called a pilot signal.
OFDM信号にパイロット信号が挿入されている場合、パイロット信号として受信した基準信号を本来の信号(既知の固定パターン)と比較することで、受信信号に含まれる雑音成分の大きさを容易に推定することができる。雑音成分の大きさの推定が成されれば、その推定値に応じて、復調方式を最適なものに切り替えるといったことも可能である。 When a pilot signal is inserted in the OFDM signal, the magnitude of the noise component included in the received signal can be easily estimated by comparing the reference signal received as the pilot signal with the original signal (known fixed pattern). be able to. If estimation of the size of the noise component is made, it is possible to switch the demodulation method to an optimum one according to the estimated value.
しかしながら、欧州等のデジタルラジオ放送(Digital Audio Broadcasting)のような、固定パターンの基準信号が設けられないシステムも存在し、そのようなシステムの受信装置において、雑音成分の大きさを推定することは困難である。 However, there are systems where a fixed pattern reference signal is not provided, such as digital audio broadcasting in Europe, etc., and it is possible to estimate the size of the noise component in the receiver of such a system. Have difficulty.
また、既知の固定パターンを有する基準信号が伝送フレーム先頭のヘッダ部に含められているシステムも存在する(例えば、下記特許文献1参照)。そのようなシステムにおいても、ヘッダ部内の信号を本来の信号(既知の固定パターン)と比較することで雑音成分の大きさを推定することができる。但し、原理上、推定の時間間隔は、時間的に隣接するヘッダ部の時間間隔よりも短くすることはできない。従って、隣接ヘッダ部間の時間間隔が長い場合には、隣接ヘッダ部間において雑音成分の大きさ変動が大きくなって推定精度に問題が生じる場合がある。
There is also a system in which a reference signal having a known fixed pattern is included in a header portion at the beginning of a transmission frame (see, for example,
また、変調された信号を復調するための復調方式には様々な方式が存在するが、各復調方式には得手/不得手が存在する。従って、受信環境に応じて復調方式を最適なものに切り替える技術は、当然に有益である。 Also, there are various demodulation methods for demodulating the modulated signal, but each demodulation method has its pros / cons. Therefore, the technology for switching the demodulation method to the optimum one according to the reception environment is naturally beneficial.
そこで本発明は、パイロット信号の有無に関わらず雑音推定が可能な受信装置を提供することを目的とする。また本発明は、復調方式をより適したものに切り替える機能を有する受信装置を提供することを目的とする。 Accordingly, an object of the present invention is to provide a receiving apparatus that can perform noise estimation regardless of the presence or absence of a pilot signal. It is another object of the present invention to provide a receiving apparatus having a function of switching a demodulation method to a more suitable one.
本発明に係る受信装置は、互いに直交するサブキャリア群を多重化する方式を用いて変調された信号を受信する受信装置において、当該受信装置の受信信号に含まれる、複数のサブキャリアによる複数のサブキャリア信号を比較することにより、前記受信信号の雑音成分の大きさを推定する雑音推定部を備え、前記複数のサブキャリアは、周波数方向又は時間方向において互いに異なる複数のサブキャリアであることを特徴とする。 A receiving apparatus according to the present invention, in a receiving apparatus that receives a signal modulated using a method of multiplexing subcarrier groups orthogonal to each other, includes a plurality of subcarriers included in a received signal of the receiving apparatus. A noise estimation unit that estimates the magnitude of the noise component of the received signal by comparing subcarrier signals, and the plurality of subcarriers is a plurality of subcarriers different from each other in the frequency direction or the time direction. Features.
これにより、パイロット信号の有無に関わらず雑音成分の大きさを推定することが可能となる。 This makes it possible to estimate the magnitude of the noise component regardless of the presence or absence of a pilot signal.
また例えば、前記受信装置は、前記受信信号を復調する復調処理部を更に備え、前記復調処理部は、前記雑音推定部の推定結果に応じて、前記受信信号を復調するための復調方式を切り替えるようにしてもよい。 For example, the receiving apparatus further includes a demodulation processing unit that demodulates the received signal, and the demodulation processing unit switches a demodulation method for demodulating the received signal according to an estimation result of the noise estimation unit. You may do it.
これにより、雑音成分の大きさに応じた復調方式を用いて受信信号の復調が成され、受信特性の向上が期待される。 As a result, the received signal is demodulated using a demodulation method corresponding to the magnitude of the noise component, and an improvement in reception characteristics is expected.
具体的には例えば、前記復調処理部は、推定された雑音成分の大きさが比較的小さい場合、遅延検波を用いた復調方式で前記受信信号の復調を行い、推定された雑音成分の大きさが比較的大きい場合、同期検波を用いた復調方式で前記受信信号の復調を行う。 Specifically, for example, when the estimated noise component size is relatively small, the demodulation processing unit demodulates the received signal by a demodulation method using delay detection, and the estimated noise component size Is relatively large, the received signal is demodulated by a demodulation method using synchronous detection.
また具体的には例えば、前記複数のサブキャリア信号は第1及び第2のサブキャリア信号を含み、前記雑音推定部は、IQ平面上における前記第1のサブキャリア信号の信号点と前記第2のサブキャリア信号の信号点との比較を介して、前記雑音成分の大きさを推定しても良い。 Also, specifically, for example, the plurality of subcarrier signals include first and second subcarrier signals, and the noise estimator includes the signal point of the first subcarrier signal on the IQ plane and the second subcarrier signal. The magnitude of the noise component may be estimated through comparison with the signal point of the subcarrier signal.
より具体的には例えば、IQ平面上における前記第2のサブキャリア信号の信号点の理想的な位置は第1〜第Nの位置の何れかであり(Nは2以上の整数)、前記雑音推定部は、前記第1のサブキャリア信号の信号点と前記第2のサブキャリア信号の信号点との位置差に基づく量を求めると共に、前記第1のサブキャリア信号の信号点と、前記第1の位置を前記第nの位置に移動させる処理を前記第2のサブキャリア信号の信号点に施して得た信号点と、の位置差に基づく量を、n=2、3、・・・、Nの夫々に対して求め、求めた量の内、最小の量を用いて前記雑音成分の大きさを推定してもよい。 More specifically, for example, the ideal position of the signal point of the second subcarrier signal on the IQ plane is any one of the first to Nth positions (N is an integer of 2 or more), and the noise The estimation unit obtains an amount based on a positional difference between the signal point of the first subcarrier signal and the signal point of the second subcarrier signal, and the signal point of the first subcarrier signal; The amount based on the position difference between the signal point obtained by applying the process of moving the position of 1 to the nth position on the signal point of the second subcarrier signal, n = 2, 3,... , N, and the magnitude of the noise component may be estimated using the smallest amount among the obtained amounts.
或いは例えば、IQ平面上における前記第1のサブキャリア信号の信号点の理想的な位置は特定基準位置を含む複数の基準位置の何れかであり、IQ平面上における前記第2のサブキャリア信号の信号点の理想的な位置は各基準位置と異なる第1〜第Nの位置の何れかであり(Nは2以上の整数)、前記雑音推定部は、前記第1のサブキャリア信号の信号点と、前記第nの位置を前記特定基準位置に移動させる処理を前記第2のサブキャリア信号の信号点に施して得た信号点と、の位置差に基づく量を、n=1、2、・・・、Nの夫々に対して求め、求めた量の内、最小の量を用いて前記雑音成分の大きさを推定してもよい。 Alternatively, for example, the ideal position of the signal point of the first subcarrier signal on the IQ plane is one of a plurality of reference positions including a specific reference position, and the second subcarrier signal on the IQ plane The ideal position of the signal point is any one of the first to Nth positions different from the respective reference positions (N is an integer of 2 or more), and the noise estimator is a signal point of the first subcarrier signal. And an amount based on the position difference between the signal point of the second subcarrier signal and the signal point obtained by performing the process of moving the nth position to the specific reference position, n = 1, 2, .., N may be obtained, and the magnitude of the noise component may be estimated using the smallest amount among the obtained amounts.
本発明の係る他の受信装置は、互いに直交するサブキャリア群を多重化する方式を用いて変調された信号を受信する受信装置において、当該受信装置の受信信号を復調する復調処理部を備え、前記復調処理部は、前記受信信号に含まれる、複数のサブキャリアによる複数のサブキャリア信号の比較結果に基づいて、前記受信信号を復調するための復調方式を切り替えることを特徴とする。 Another receiving apparatus according to the present invention includes a demodulation processing unit that demodulates a received signal of the receiving apparatus in a receiving apparatus that receives a signal modulated using a method of multiplexing subcarrier groups orthogonal to each other, The demodulation processing unit switches a demodulation method for demodulating the reception signal based on a comparison result of a plurality of subcarrier signals by a plurality of subcarriers included in the reception signal.
複数のサブキャリア信号を比較することで、受信環境(例えば、雑音の大小)を評価することが可能である。上記他の受信装置によれば、受信環境に応じた復調方式を用いて受信信号の復調が成され、受信特性の向上が期待される。 By comparing a plurality of subcarrier signals, it is possible to evaluate the reception environment (for example, the magnitude of noise). According to the other receiving apparatus, the received signal is demodulated using a demodulation method corresponding to the receiving environment, and an improvement in receiving characteristics is expected.
本発明によれば、パイロット信号の有無に関わらず雑音推定が可能な受信装置を提供することが可能となる。また、復調方式をより適したものに切り替える機能を有する受信装置を提供することが可能となる。 According to the present invention, it is possible to provide a receiving apparatus capable of noise estimation regardless of the presence or absence of a pilot signal. In addition, it is possible to provide a receiving apparatus having a function of switching the demodulation method to a more suitable one.
本発明の意義ないし効果は、以下に示す実施の形態の説明により更に明らかとなろう。ただし、以下の実施の形態は、あくまでも本発明の一つの実施形態であって、本発明ないし各構成要件の用語の意義は、以下の実施の形態に記載されたものに制限されるものではない。 The significance or effect of the present invention will become more apparent from the following description of embodiments. However, the following embodiment is merely one embodiment of the present invention, and the meaning of the term of the present invention or each constituent element is not limited to that described in the following embodiment. .
以下、本発明の実施の形態につき、図面を参照して具体的に説明する。参照される各図において、同一の部分には同一の符号を付し、同一の部分に関する重複する説明を原則として省略する。尚、本明細書では、記述の簡略化上、符号又は記号を表記することによって、その符号又は記号に対応する名称を省略又は簡略化することがある。例えば、後述のサブキャリア信号e(t,l)を、単に信号e(t,l)又はe(t,l)と表記することがある。 Hereinafter, embodiments of the present invention will be specifically described with reference to the drawings. In each of the drawings to be referred to, the same part is denoted by the same reference numeral, and redundant description regarding the same part is omitted in principle. In the present specification, for the sake of simplification of description, a name corresponding to the code or symbol may be omitted or simplified by describing the code or symbol. For example, a subcarrier signal e (t, l) described later may be simply expressed as a signal e (t, l) or e (t, l).
本実施形態に係る通信では、デジタル信号の変調方式としてDQPSK(Differential Quadrature Phase Shift Keying;差動四相位相偏移変調)方式を用いる。 In communication according to the present embodiment, a DQPSK (Differential Quadrature Phase Shift Keying) system is used as a digital signal modulation system.
DQPSKの基礎となるQPSK(Quadrature Phase Shift Keying)の説明を先に行いつつ、DQPSKについて説明する。 DQPSK will be described while first explaining QPSK (Quadrature Phase Shift Keying) which is the basis of DQPSK.
離散時刻kにおける2つの情報データをa[k]及びb[k]にて表すと、QPSKでは、情報データa[k]及びb[k]に対して、下式(A1)に示すQPSK信号y[k]が割り当てられる。a[k]及びb[k]の夫々は、1又は(−1)をとる1ビットデータである。jは、虚数単位である。また、√2は、2の正の平方根を表す。
y[k]=(a[k]+j・b[k])/√2 ・・・(A1)
When the two pieces of information data at the discrete time k are represented by a [k] and b [k], in QPSK, the QPSK signal represented by the following equation (A1) with respect to the information data a [k] and b [k] y [k] is assigned. Each of a [k] and b [k] is 1-bit data that takes 1 or (−1). j is an imaginary unit. √2 represents the positive square root of 2.
y [k] = (a [k] + j · b [k]) / √2 (A1)
a及びbは、夫々、送信装置から受信装置に伝送されるべき第1及び第2の情報データを表し、yはQPSK信号を表している。a[k]、b[k]及びy[k]は、夫々、離散時刻kにおける第1の情報データ、第2の情報データ及びQPSK信号を表している。離散時刻(k−1)から単位時間が経過した時刻は離散時刻kであり、離散時刻kから単位時間が経過した時刻は離散時刻(k+1)である。 a and b represent first and second information data to be transmitted from the transmission device to the reception device, respectively, and y represents a QPSK signal. a [k], b [k], and y [k] represent the first information data, the second information data, and the QPSK signal, respectively, at the discrete time k. The time at which the unit time has elapsed from the discrete time (k−1) is the discrete time k, and the time at which the unit time has elapsed from the discrete time k is the discrete time (k + 1).
DQPSKによって変調された信号z[k]は、下式(A2)にて表される。DQPSKによって変調された信号をDQPSK変調信号と呼ぶ。z[k−1]は、離散時刻(k−1)におけるDQPSK変調信号であり、z[k]は、離散時刻kにおけるDQPSK変調信号である。
z[k]=z[k−1]・y[k] ・・・(A2)
The signal z [k] modulated by DQPSK is expressed by the following equation (A2). A signal modulated by DQPSK is called a DQPSK modulated signal. z [k-1] is a DQPSK modulated signal at discrete time (k-1), and z [k] is a DQPSK modulated signal at discrete time k.
z [k] = z [k−1] · y [k] (A2)
複素信号であるQPSK信号y[k]の信号点は、図1に示す如く、次の4つの信号点の何れかとなる。
(−1/√2,1/√2) 、(1/√2,1/√2)、
(−1/√2,−1/√2)、(1/√2,−1/√2)
The signal point of the complex signal QPSK signal y [k] is one of the following four signal points as shown in FIG.
(-1 / √2, 1 / √2), (1 / √2, 1 / √2),
(-1 / √2, -1 / √2), (1 / √2, -1 / √2)
本明細書では、任意の複素信号の実部及び虚部が夫々Re及びImで表される場合、その複素信号を“Re+j・Im”又は(Re,Im)によって表すことがある。複素信号において、実部を同相成分と呼ぶと共に虚部を直交成分と呼ぶ。更に、一般的なデジタル変復調の考察において採用されるように、同相成分及び直交成分に夫々I軸及びQ軸を割り当てて、複素平面をIQ平面と呼ぶ。Q軸は、I軸を反時計回り方向に90°だけ回転したものである。“Re+j・Im”によって表される複素信号がIQ平面上に配置されるべき点を信号点(Re,Im)と表記する。特に記述なき限り、以下の説明文における信号点は、IQ平面上の信号点を指す。 In this specification, when the real part and the imaginary part of an arbitrary complex signal are represented by Re and Im, respectively, the complex signal may be represented by “Re + j · Im” or (Re, Im). In a complex signal, the real part is called an in-phase component and the imaginary part is called a quadrature component. Further, as adopted in general digital modulation / demodulation considerations, the in-phase component and the quadrature component are assigned the I-axis and the Q-axis, respectively, and the complex plane is referred to as the IQ plane. The Q axis is obtained by rotating the I axis counterclockwise by 90 °. A point where a complex signal represented by “Re + j · Im” should be arranged on the IQ plane is represented as a signal point (Re, Im). Unless otherwise specified, signal points in the following description refer to signal points on the IQ plane.
IQ平面上の任意の信号点に対してQPSK信号y[k]を乗算する処理は、該信号点の位置を315°、45°、135°、225°だけ回転させる処理に等しい。以下に、4種類のQPSK信号y[k]と回転角との関係を示す。例えば、信号点の位置が(1,0)である複素信号にy[k]=(1/√2,1/√2)を乗算すると、IQ平面上において、その複素信号の信号点は315°だけ回転し、信号点の位置は(1,0)から(1/√2,1/√2)へと遷移する。尚、本実施形態において、信号又は信号点の回転とは、特に記述なき限り、IQ平面の原点を軸とした時計回り方向への回転を意味する。
(1/√2,1/√2) ・・・315°
(1/√2,−1/√2) ・・・45°
(−1/√2,−1/√2)・・・135°
(−1/√2,1/√2) ・・・225°
The process of multiplying an arbitrary signal point on the IQ plane by the QPSK signal y [k] is equivalent to the process of rotating the position of the signal point by 315 °, 45 °, 135 °, and 225 °. The relationship between the four types of QPSK signals y [k] and the rotation angle is shown below. For example, when a complex signal whose signal point is (1, 0) is multiplied by y [k] = (1 / √2, 1 / √2), the signal point of the complex signal is 315 on the IQ plane. The position of the signal point changes from (1, 0) to (1 / √2, 1 / √2). In the present embodiment, rotation of a signal or signal point means rotation in the clockwise direction about the origin of the IQ plane unless otherwise specified.
(1 / √2, 1 / √2) ・ ・ ・ 315 °
(1 / √2, -1 / √2) ・ ・ ・ 45 °
(-1 / √2, -1 / √2) ... 135 °
(-1 / √2, 1 / √2) 225 °
従って、式(A2)からも分かるように、DQPSK変調信号の信号点は、図2(a)に示す4つの第1信号点の何れか又は図2(b)に示す4つの第2信号点の何れかとなり、DQPSK変調信号の信号点が第1信号点になる状態とDQPSK変調信号の信号点が第2信号点になる状態が交互に発生する。
第1信号点群は、4つの信号点
(−1/√2,1/√2) 、(1/√2,1/√2)、
(−1/√2,−1/√2)、(1/√2,−1/√2)
から成り、
第2信号点群は、4つの信号点
(1,0) 、(0,1)、(−1,0)、(0,−1)
から成る。
Therefore, as can be seen from the equation (A2), the signal point of the DQPSK modulated signal is either one of the four first signal points shown in FIG. 2A or the four second signal points shown in FIG. Thus, a state where the signal point of the DQPSK modulation signal becomes the first signal point and a state where the signal point of the DQPSK modulation signal becomes the second signal point alternately occur.
The first signal point group includes four signal points (−1 / √2, 1 / √2), (1 / √2, 1 / √2),
(-1 / √2, -1 / √2), (1 / √2, -1 / √2)
Consisting of
The second signal point group includes four signal points (1, 0), (0, 1), (-1, 0), (0, -1).
Consists of.
受信装置にて受信するDQPSK変調信号には、送信装置及び受信装置間の伝送路にて付与された雑音が重畳しており、受信されたDQPSK変調信号の信号点の位置は、理想的な信号点の位置からずれる(但し、場合によっては全くずれない場合も存在する)。理想的な信号点とは、雑音の影響がない信号点という意味である。 The DQPSK modulated signal received by the receiving device is superimposed with noise added in the transmission path between the transmitting device and the receiving device, and the position of the signal point of the received DQPSK modulated signal is an ideal signal. It deviates from the position of the point (however, there may be a case where there is no deviation at all). An ideal signal point means a signal point that is not affected by noise.
以下、理想的な信号点である信号点(−1/√2,1/√2) 、(1/√2,1/√2)、(−1/√2,−1/√2)及び(1/√2,−1/√2)を総称して第1基準点群と呼び、第1基準点群を形成する各信号点を第1基準点と呼ぶ。同様に、理想的な信号点である信号点(1,0) 、(0,1)、(−1,0)及び(0,−1)を総称して第2基準点群と呼び、第2基準点群を形成する各信号点を第2基準点と呼ぶ。また、第1及び/又は第2基準点を、単に基準点と呼ぶこともある。 Hereinafter, signal points (−1 / √2, 1 / √2), (1 / √2, 1 / √2), (−1 / √2, −1 / √2), which are ideal signal points, and (1 / √2, −1 / √2) is collectively referred to as a first reference point group, and each signal point forming the first reference point group is referred to as a first reference point. Similarly, signal points (1, 0), (0, 1), (-1, 0), and (0, -1), which are ideal signal points, are collectively referred to as a second reference point group. Each signal point forming the two reference points is called a second reference point. In addition, the first and / or second reference point may be simply referred to as a reference point.
図3に、本発明の実施形態に係るデジタル放送受信装置10(以下、受信装置10と略記する)の概略ブロック図を示す。 FIG. 3 shows a schematic block diagram of a digital broadcast receiver 10 (hereinafter abbreviated as receiver 10) according to an embodiment of the present invention.
受信装置10と図示されない送信装置(デジタル放送送信装置)は、デジタル放送システムを構成し、このデジタル放送システムでは、放送方式にOFDM(直交周波数多重分割;Orthogonal Frequency Division Multiplexing)方式を採用している。OFDM方式は、1チャンネルの帯域内に互いに直交する多数のサブキャリア(以下、単にキャリアとも言う)を多重化する方式である。本実施形態において、送信装置は一定の位置に固定されているものとする。受信装置10が車両等の移動体に搭載された場合、受信装置10は移動しながら信号の受信を行うことがある。
The receiving
送信装置では、サブキャリアごとに、伝送すべきベースバンド信号に応じてサブキャリアを変調し、その変調によって得られる信号に対して逆高速フーリエ変換(IFFT;Inverse Fast Fourier Transform)を施すことでOFDM信号を生成する。生成されたOFDM信号は、デジタル放送(例えば、いわゆる地上デジタル放送)により受信装置10に対して送信されるべき信号として、送信装置から送信される。ベースバンド信号は、伝送されるべき映像信号や音声信号を含み、第1の情報データaの列及び第2の情報データbの列から形成される。上述したように、本実施形態では、変調方式にDQPSKが用いられることを想定する。
In the transmission apparatus, for each subcarrier, the subcarrier is modulated in accordance with the baseband signal to be transmitted, and an inverse fast Fourier transform (IFFT) is performed on the signal obtained by the modulation to perform OFDM. Generate a signal. The generated OFDM signal is transmitted from the transmission device as a signal to be transmitted to the
受信装置10は、このデジタル放送によって送信されてきたデジタル放送信号を受信する。デジタル放送信号は、複数チャンネル分のOFDM信号を含む。受信装置10は、受信アンテナ11と、チューナ部12と、FFT処理部13と、雑音推定部14と、復調処理部15と、を備える。
The receiving
チューナ部12は、受信アンテナ11を介して上記のデジタル放送信号を受信し、受信したデジタル放送信号の中から、選局されたチャンネルに対応するOFDM信号を抽出して出力する。チューナ部12から出力されたOFDM信号は、FFT処理部13に送られる。
The
FFT処理部13は、受信したOFDM信号を、高速フーリエ変換(FFT;Fast Fourier Transform)を用いて時間領域上の信号から周波数領域上の信号に変換する。この変換によって得られた周波数領域上のOFDM信号は、雑音推定部14及び復調処理部15に送られる。
The
復調処理部15は、FFT処理部13から送られてきた周波数領域上のOFDM信号をベースバンド信号に変換するための復調処理を行う。この復調処理によって得られるベースバンド信号は、例えば、MPEG(Moving Picture Experts Group)符号化信号である。MPEG符号化信号は、デジタル放送によって伝達されるべき映像信号や音声信号を符号化した信号である。この復調処理によって得られたMPEG符号化信号は、MPEGデコーダ(不図示)に送られてデコードされた後、表示装置やスピーカ(双方不図示)に送られ、映像として表示又は音声として出力される。受信装置10は、MPEGデコーダ、表示装置及びスピーカをも含みうる。
The
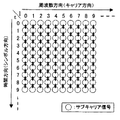
FFT処理部13から出力されるOFDM信号は、図4に示す如く、周波数方向及び時間方向に二次元配列された信号(以下、サブキャリア信号という)から成り、これを総称してOFDMシンボル列と呼ぶ。尚、周波数方向及び時間方向は夫々キャリア方向及びシンボル方向とも呼ばれる。一般的な通信システムにおけるOFDMシンボル列には、固定パターンの基準信号がパイロット信号として挿入されていることもあるが、本実施形態におけるOFDMシンボル列には、パイロット信号が挿入されていないものとする(但し、パイロット信号が挿入されていても構わない)。
As shown in FIG. 4, the OFDM signal output from the
時間方向に対応する時間番号(シンボル番号)をtで表し、周波数方向に対応するキャリア番号をlで表す。ここで、tは0以上の整数をとり、lは0以上且つ(L−1)以下の整数をとる。Lは、OFDM信号を形成するサブキャリアの総本数である。OFDM信号を形成するL本のサブキャリアの周波数は互いに異なり且つ該L本のサブキャリアは互いに直交する。lが増大するほど、対応するサブキャリアの周波数は増大するものとする。tは、OFDM信号のシンボル長を単位として考えた時刻を表す。時刻tから、OFDM信号のシンボル長分の時間が経過した時刻が時刻(t+1)である。tとlを一意に定めることによって一意に定まる、OFDMシンボル列内の位置をキャリア位置と呼び、それを(t,l)にて表す。更に、キャリア位置(t,l)に配置されたサブキャリア信号を、e(t,l)にて表す。サブキャリア信号e(t,l)は、時刻tの受信信号(換言すれば、時刻tにて受信されたシンボル)の内、キャリア番号lのサブキャリアによる信号を指す。 A time number (symbol number) corresponding to the time direction is represented by t, and a carrier number corresponding to the frequency direction is represented by l. Here, t is an integer of 0 or more, and l is an integer of 0 or more and (L−1) or less. L is the total number of subcarriers forming the OFDM signal. The frequencies of the L subcarriers forming the OFDM signal are different from each other and the L subcarriers are orthogonal to each other. It is assumed that the frequency of the corresponding subcarrier increases as l increases. t represents a time considered with the symbol length of the OFDM signal as a unit. The time (t + 1) is the time when the time corresponding to the symbol length of the OFDM signal has elapsed from time t. A position in the OFDM symbol string that is uniquely determined by uniquely defining t and l is called a carrier position, and is represented by (t, l). Further, the subcarrier signal arranged at the carrier position (t, l) is represented by e (t, l). The subcarrier signal e (t, l) indicates a signal by the subcarrier of the carrier number l among the received signals at the time t (in other words, the symbols received at the time t).
基準点は、シンボル単位で、第1及び第2基準点間で入れ替わる。説明の具体化のため、tが偶数であるときのサブキャリア信号e(t,l)に対する基準点が第1基準点であり、tが奇数であるときのサブキャリア信号e(t,l)に対する基準点が第2基準点であるとする。更に、ゼロ以上の任意の偶数値をとる変数tOを導入する。1つのシンボル内において、基準点の種類は共通しているものとする。即ち、サブキャリア信号e(tO,0)〜e(tO,L−1)に対する基準点は全て第1基準点であり、サブキャリア信号e(tO+1,0)〜e(tO+1,L−1)に対する基準点は全て第2基準点である。 The reference point is exchanged between the first and second reference points in symbol units. For concrete description, the reference point for the subcarrier signal e (t, l) when t is an even number is the first reference point, and the subcarrier signal e (t, l) when t is an odd number. The reference point for is a second reference point. Furthermore, introducing the variable t O take any even value of greater than zero. It is assumed that the types of reference points are common in one symbol. That is, all the reference points for the subcarrier signals e (t O , 0) to e (t O , L-1) are the first reference points, and the subcarrier signals e (t O +1,0) to e (t O All reference points for +1, L-1) are second reference points.
送信装置では、DQPSKによって各サブキャリアが変調され、サブキャリア信号e(tO,0)〜e(tO,L−1)には第1基準点群を形成する何れかの第1基準点が割り当てられると共に、サブキャリア信号e(tO+1,0)〜e(tO+1,L−1)には第2基準点群を形成する何れかの第2基準点が割り当てられる。 In transmitting apparatus, each sub-carrier is modulated by DQPSK, subcarrier signal e (t O, 0) ~e (t O, L-1) first reference point of any of a first reference point group in together they are assigned, either the second reference points forming a second reference point group is assigned to the subcarrier signal e (t O +1,0) ~e ( t O + 1, L-1).
時間番号が同一であって且つ周波数方向において互いに隣接する2つのサブキャリアに対して同一の基準点が割り当てられた場合、その2つのサブキャリアについての受信信号間では振幅や位相があまり変動しないため、その2つのサブキャリアについての受信信号(即ち、その2つのサブキャリアについての2つのサブキャリア信号)の差をとると、信号成分が打ち消され、雑音成分が残る。故に、その差から雑音成分の大きさを推定することが可能である。 If the same reference point is assigned to two subcarriers that have the same time number and are adjacent to each other in the frequency direction, the amplitude and phase do not vary much between the received signals for the two subcarriers. Taking the difference between the received signals for the two subcarriers (ie, the two subcarrier signals for the two subcarriers) cancels the signal component and leaves the noise component. Therefore, it is possible to estimate the magnitude of the noise component from the difference.
実際には、対比されるべき各サブキャリア信号の信号成分の種類は4種類であるため、信号成分の種類によって生じる可能性のある4つの差を計算して、その4つの差の内の最小値を求め、その最小値を、最終的に求めるべき差として決定することが必要となる(詳細は後述)。 Actually, since there are four types of signal components of each subcarrier signal to be compared, four differences that may be caused by the types of signal components are calculated, and the minimum of the four differences is calculated. It is necessary to obtain a value and determine the minimum value as a difference to be finally obtained (details will be described later).
送信装置から送られた信号が受信装置10にて受信されるまでに、様々な要因で信号が劣化し、受信時における雑音成分の大きさが変わる。雑音成分が大きくなると、受信信号の信号点の分布が基準点を基準に広がってゆく。
By the time the signal transmitted from the transmission device is received by the
図5(a)及び(b)並びに図6(a)及び(b)に、受信信号の信号点の分布の例を示す。図5(a)及び(b)並びに図6(a)及び(b)は、FFT処理部13から送出されるサブキャリア信号の信号点の分布を表している。図5(a)では、雑音成分が比較的少なく且つ対応する基準点が第1基準点である場合の信号点分布が示され、図5(b)では、雑音成分が比較的多く且つ対応する基準点が第1基準点である場合の信号点分布が示され、図6(a)では、雑音成分が比較的少なく且つ対応する基準点が第2基準点である場合の信号点分布が示され、図6(b)では、雑音成分が比較的多く且つ対応する基準点が第2基準点である場合の信号点分布が示されている。FFT処理部13から送出される各サブキャリア信号は、雑音成分を含んだDQPSK変調信号であり、各サブキャリア信号の信号点は基準点からずれていて(但し、場合によっては全くずれない場合も存在する)、且つ、そのずれは雑音成分の増大に伴って増大する傾向にある。
FIGS. 5A and 5B and FIGS. 6A and 6B show examples of signal point distributions of received signals. FIGS. 5A and 5B and FIGS. 6A and 6B show the distribution of signal points of the subcarrier signal transmitted from the
雑音推定部14による、雑音成分の大きさの具体的な推定方法を説明する。雑音推定部14では、同一シンボルに属する、周波数方向において互いに隣接する2つのサブキャリア信号を比較する。比較されるべき2つのサブキャリア信号を、便宜上e(tA,lA)及びe(tA,lA+1)にて表す。lAはゼロ以上且つ(L−2)以下の整数である。tAはゼロ以上の任意の整数であるが、今、説明の具体化のため、tAは偶数であるとする。従って、サブキャリア信号e(tA,lA)及びe(tA,lA+1)に対応する基準点は第1基準点である。
A specific method for estimating the magnitude of the noise component by the
サブキャリア信号e(tA,lA)の同相成分及び直交成分を夫々pi0及びpq0にて表すと共に、サブキャリア信号e(tA,lA+1)の同相成分及び直交成分を夫々si0及びsq0にて表す。更に、
IQ平面上でサブキャリア信号e(tA,lA+1)を90°だけ回転して得た信号の同相成分及び直交成分を夫々si1及びsq1にて表し、
IQ平面上でサブキャリア信号e(tA,lA+1)を180°だけ回転して得た信号の同相成分及び直交成分を夫々si2及びsq2にて表し、
IQ平面上でサブキャリア信号e(tA,lA+1)を270°だけ回転して得た信号の同相成分及び直交成分を夫々si3及びsq3にて表す。
The in-phase component and the quadrature component of the subcarrier signal e (t A , l A ) are represented by pi0 and pq0, respectively, and the in-phase component and the quadrature component of the subcarrier signal e (t A , l A +1) are si0 and sq0, respectively. Represented by Furthermore,
The in-phase component and the quadrature component of the signal obtained by rotating the subcarrier signal e (t A , l A +1) by 90 ° on the IQ plane are represented by si1 and sq1, respectively.
In-phase and quadrature components of a signal obtained by rotating the subcarrier signal e (t A , l A +1) by 180 ° on the IQ plane are represented by si2 and sq2, respectively.
In-phase and quadrature components of a signal obtained by rotating the subcarrier signal e (t A , l A +1) by 270 ° on the IQ plane are represented by si3 and sq3, respectively.
図7に、サブキャリア信号e(tA,lA)に対する基準点が(1/√2,1/√2)であって且つサブキャリア信号e(tA,lA+1)に対する基準点が(1/√2,−1/√2)であると仮定した場合における、信号点(pi0,pq0)、(si0,sq0)、(si1,sq1)、(si2,sq2)及び(si3,sq3)の関係例を示す。
IQ平面上でサブキャリア信号e(tA,lA+1)を90°、180°又は270°だけ回転させる処理は、サブキャリア信号e(tA,lA+1)の基準点を何れかの第1基準点から他の第1基準点へと移動させる処理に等しい。例えば、サブキャリア信号e(tA,lA+1)に対する基準点が(1/√2,−1/√2)である場合(図7参照)、IQ平面上でサブキャリア信号e(tA,lA+1)を90°、180°、270°だけ回転させると、回転後のサブキャリア信号e(tA,lA+1)の基準点は、夫々、(−1/√2,−1/√2)、(−1/√2,1/√2)、(1/√2,1/√2)となる。
In FIG. 7, the reference points for the subcarrier signal e (t A , l A ) are (1 / √2, 1 / √2) and the reference points for the subcarrier signal e (t A , l A +1) are Signal points (pi0, pq0), (si0, sq0), (si1, sq1), (si2, sq2), and (si3, sq3) assuming that (1 / √2, −1 / √2). ) Is shown as an example.
The process of rotating the subcarrier signal e (t A , l A +1) by 90 °, 180 ° or 270 ° on the IQ plane is performed by setting the reference point of the subcarrier signal e (t A , l A +1) to This is equivalent to the process of moving from the first reference point to another first reference point. For example, when the reference point for the subcarrier signal e (t A , l A +1) is (1 / √2, −1 / √2) (see FIG. 7), the subcarrier signal e (t A on the IQ plane). , L A +1) are rotated by 90 °, 180 °, 270 °, the reference points of the rotated subcarrier signals e (t A , l A +1) are (−1 / √2, −1), respectively. / √2), (−1 / √2, 1 / √2), (1 / √2, 1 / √2).
雑音推定部14では、サブキャリア信号e(tA,lA)に対する基準点が何れの第1基準点であるかが不明であると共に、サブキャリア信号e(tA,lA+1)に対する基準点も何れの第1基準点であるかが不明である。一方で、雑音成分の大きさを推定するためには、サブキャリア信号e(tA,lA)及び(tA,lA+1)間の信号成分の相違(即ち、基準点の相違)を打ち消す必要がある。
The
故に、雑音推定部14は、信号点(pi0,pq0)及び(si0,sq0)間の位置差に基づく量dif0と、信号点(pi0,pq0)及び(si1,sq1)間の位置差に基づく量dif1と、信号点(pi0,pq0)及び(si2,sq2)間の位置差に基づく量dif2と、信号点(pi0,pq0)及び(si3,sq3)間の位置差に基づく量dif3とを個別に求め、dif0〜dif3の内の最小値を雑音評価値difとして求める。雑音評価値difは、サブキャリア信号e(tA,lA)及び(tA,lA+1)間の信号成分の相違が打ち消された、雑音成分の大きさを表す評価値として取り扱われる。雑音成分が異常に大きくないのであれば、dif0〜dif3の内の最小値が、雑音成分の大きさのみを反映した値である可能性が最も高いと考えられるからである。図7に示す例では、dif3が雑音評価値difとして選択される(或いは、dif3が雑音評価値difとして選択される可能性が高い)。
Therefore, the
具体的には、下記式(B0)〜(B3)に従って、量dif0〜dif3を求めることができる。
dif0=(pi0−si0)2+(pq0−sq0)2 ・・・(B0)
dif1=(pi0−si1)2+(pq0−sq1)2 ・・・(B1)
dif2=(pi0−si2)2+(pq0−sq2)2 ・・・(B2)
dif3=(pi0−si3)2+(pq0−sq3)2 ・・・(B3)
式(B0)〜(B3)に従うdif0、dif1及びdif2、dif3は、夫々、信号点(pi0,pq0)及び(si0,sq0)間の距離、信号点(pi0,pq0)及び(si1,sq1)間の距離、信号点(pi0,pq0)及び(si2,sq2)間の距離、信号点(pi0,pq0)及び(si3,sq3)間の距離の二乗である。勿論、式(B0)〜(B3)の各右辺の平方根をdif0〜dif3とすることも可能である。
Specifically, the quantities dif0 to dif3 can be obtained according to the following formulas (B0) to (B3).
dif0 = (pi0−si0) 2 + (pq0−sq0) 2 (B0)
dif1 = (pi0−si1) 2 + (pq0−sq1) 2 (B1)
dif2 = (pi0−si2) 2 + (pq0−sq2) 2 (B2)
dif3 = (pi0−si3) 2 + (pq0−sq3) 2 (B3)
Dif0, dif1, and dif2, and dif3 according to the equations (B0) to (B3) are respectively the distance between the signal points (pi0, pq0) and (si0, sq0), the signal points (pi0, pq0), and (si1, sq1). Between the signal points (pi0, pq0) and (si2, sq2), and the distance between the signal points (pi0, pq0) and (si3, sq3). Of course, the square root of each right side of the formulas (B0) to (B3) can be set to dif0 to dif3.
tAが偶数である場合における雑音評価値difの導出法を説明したが、tAが奇数である場合、即ち、サブキャリア信号e(tA,lA)及びe(tA,lA+1)に対応する基準点が第2基準点である場合にも、上述した方法と同様の方法にて雑音評価値difを求めることができる。図8に、tAが奇数である場合において、サブキャリア信号e(tA,lA)に対する基準点が(−1,0)であって且つサブキャリア信号e(tA,lA+1)に対する基準点が(1,0)であると仮定した場合における、信号点(pi0,pq0)、(si0,sq0)、(si1,sq1)、(si2,sq2)及び(si3,sq3)の関係例を示す。図8に示す例では、dif2が雑音評価値difとして選択される(或いは、dif2が雑音評価値difとして選択される可能性が高い)。 The method for deriving the noise evaluation value dif when t A is an even number has been described. However, when t A is an odd number, that is, the subcarrier signals e (t A , l A ) and e (t A , l A +1). When the reference point corresponding to) is the second reference point, the noise evaluation value dif can be obtained by the same method as described above. In FIG. 8, when t A is an odd number, the reference point for the subcarrier signal e (t A , l A ) is (−1, 0) and the subcarrier signal e (t A , l A +1) Of the signal points (pi0, pq0), (si0, sq0), (si1, sq1), (si2, sq2), and (si3, sq3) when it is assumed that the reference point for (1, 0) is An example is shown. In the example illustrated in FIG. 8, dif2 is selected as the noise evaluation value dif (or dif2 is highly likely to be selected as the noise evaluation value dif).
また、雑音推定部14は、lAが0、1、2、・・・、(L−3)及び(L−2)の夫々である場合に対して、サブキャリア信号e(tA,lA)及びe(tA,lA+1)の雑音評価値difを求めることができる。
In addition, the
図9に、雑音評価値difが求められるサブキャリア信号のペアを示す。図9では、雑音評価値difが求められるサブキャリア信号のペアを矢印にて繋いでいる(後述の図14及び図15においても同様)。このように、雑音推定部14は、e(0,0)及びe(0,1)のペア、e(0,1)及びe(0,2)のペア、・・・、e(0,L−2)及びe(0,L−1)のペア、e(1,0)及びe(1,1)のペア、e(1,1)及びe(1,2)のペア、・・・、e(1,L−2)及びe(1,L−1)のペア、e(2,0)及びe(2,1)のペア、・・・、に対して、順次、雑音評価値difを求めることができる。
FIG. 9 shows a pair of subcarrier signals for which the noise evaluation value dif is obtained. In FIG. 9, pairs of subcarrier signals for which the noise evaluation value dif is obtained are connected by arrows (the same applies to FIGS. 14 and 15 described later). Thus, the
雑音推定部14は、一定時間分の雑音評価値difを受信装置10内のメモリ(不図示)に格納しておき、一定時間分の雑音評価値difの平均をとることで雑音成分の大きさを推定する。例えば、或る注目時刻における雑音成分の大きさを推定する場合、図10(a)に示す如く、注目時刻の一定時間前の時刻と注目時刻との間に求められたQ個の雑音評価値difの平均値を算出し(Qは2以上の整数)、該平均値を注目時刻における雑音成分の大きさの推定値として取り扱う、或いは、該平均値に応じた量を注目時刻における雑音成分の大きさの推定値として取り扱う。Q個の雑音評価値difの平均値が増大するに従って雑音成分の大きさの推定値も増大し、Q個の雑音評価値difの平均値が減少するに従って雑音成分の大きさの推定値も減少するものとする。尚、雑音推定部14によって推定される雑音成分の大きさは、信号成分の大きさを固定値にて正規化したときの雑音成分の大きさである。
The
図10(a)を参照して上述した方法では、1つ1つの時刻ごとに雑音成分の大きさが推定されるが、全区間を複数の単位区間に分割し、単位区間ごとに雑音成分の大きさを推定するようにしても良い。即ち例えば、図10(b)に示す如く、時刻T1及びT2間の単位区間をP12にて参照し、時刻T2及びT3間の単位区間をP23にて参照し、時刻T3及びT4間の単位区間をP34にて参照した場合、単位区間P12中に得られたQ個の雑音評価値difの平均値又は該平均値に応じた量を、単位区間P23中の各時刻における雑音成分の大きさの推定値として取り扱い、単位区間P23中に得られたQ個の雑音評価値difの平均値又は該平均値に応じた量を、単位区間P34中の各時刻における雑音成分の大きさの推定値として取り扱うようにしても良い(それ以降の単位区間に対しても同様)。この方法によれば、各単位区間において、単位区間中における雑音成分の大きさの推定値は一定となるが、1つ1つの時刻ごとに雑音成分の大きさを推定する方法と比べて、推定に必要なメモリ容量が少なくて済む。尚、iを自然数とした場合、時刻Ti+1は時刻Tiよりも後に訪れる時刻である。 In the method described above with reference to FIG. 10 (a), the magnitude of the noise component is estimated for each time, but the entire section is divided into a plurality of unit sections, and the noise component is divided for each unit section. You may make it estimate a magnitude | size. That is, for example, as shown in FIG. 10B, the unit interval between times T 1 and T 2 is referred to at P 12 , the unit interval between times T 2 and T 3 is referred to at P 23 , and time T When the unit interval between 3 and T 4 is referred to at P 34 , the average value of the Q noise evaluation values dif obtained during the unit interval P 12 or the amount corresponding to the average value is expressed as the unit interval P 23. the amount corresponding to the average value or the average value of the noise evaluation value dif handling as the magnitude estimate of the Q-number obtained during a unit interval P 23 noise component at each time in the, in the unit section P 34 May be treated as an estimated value of the magnitude of the noise component at each time (same for subsequent unit intervals). According to this method, in each unit interval, the estimated value of the noise component in the unit interval is constant, but compared with the method of estimating the noise component size for each time point, Requires less memory capacity. When i is a natural number, time T i + 1 is a time visited after time T i .
図11は、受信装置10におけるCN比(Carrier to Noise Ratio)と雑音成分の大きさの推定値との関係を示すシミュレーション結果である。図11のグラフにおいて、横軸はCN比(単位はデシベル)であり、縦軸は雑音成分の大きさの推定値である。図11において、実線曲線201は、送信装置及び受信装置10間の伝送路において信号にAWGN(Additive White Gaussian Noise)のみが影響した場合におけるシミュレーション結果である。破線曲線202は、送信装置及び受信装置10間の伝送路において信号に、AWGN(Additive White Gaussian Noise)、及び、TU−6(Typical Urban 6-path Rayleigh fading channel model)に準拠したレイリーフェージングが影響した場合におけるシミュレーション結果である。TU−6のパラメータであるドップラ周波数は80Hzとした。
FIG. 11 is a simulation result showing the relationship between the CN ratio (Carrier to Noise Ratio) and the estimated value of the noise component in the receiving
CN比の増減につれて雑音成分の大きさの推定値も増減している。即ち、図11からも分かるように、上述の推定方法によって、雑音成分の大きさを良好に見積もることができている。 As the CN ratio increases and decreases, the estimated value of the noise component also increases and decreases. That is, as can be seen from FIG. 11, the magnitude of the noise component can be estimated well by the above estimation method.
図3の復調処理部15は、複数の復調方式の何れかを択一的に用いて、FFT処理部13の出力信号を復調することができる。複数の復調方式には、雑音成分の大きさが比較的小さな信号を復調するのに適した第1復調方式と、雑音成分の大きさが比較的大きな信号を復調するのに適した第2復調方式と、が含まれる。フェージングの影響が比較的少ない信号を復調するのに適した復調方式が第1復調方式であって、フェージングの影響が比較的多い信号を復調するのに適した復調方式が第2復調方式である、と解釈しても良い。受信装置10が静止している状態で信号を受信することにより、フェージングの影響が比較的少ない信号(フェージングの影響を受けていない信号を含む)が受信装置10にて受信され、受信装置10が移動している状態で信号を受信することにより、フェージングの影響が比較的多い信号が受信装置10にて受信される。
The
復調処理部15は、雑音推定部14の推定結果に応じて、実際に用いる復調方式を切り替える。例えば、雑音推定部14にて得られた雑音成分の大きさの推定値が所定の基準値よりも小さい場合、雑音成分の大きさが比較的小さいとみなして、第1復調方式を用いてFFT処理部13の出力信号の復調を行い、雑音推定部14にて得られた雑音成分の大きさの推定値が上記基準値以上である場合、雑音成分の大きさが比較的大きいとみなして、第2復調方式を用いてFFT処理部13の出力信号の復調を行う。雑音成分の大きさに応じて復調方式を切り替えるのは、雑音成分が小さい場合と大きい場合とで復調方式を切り替えた方が、受信特性が向上する可能性が高いからである。
The
第1復調方式は、例えば遅延検波を用いた復調方式であり、第2復調方式は、例えば同期検波を用いた復調方式である。ここにおける遅延検波を用いた復調方式とは、OFDM信号の復調に利用可能な、任意の遅延検波を用いた任意の復調方式であり、ここにおける同期検波を用いた復調方式とは、OFDM信号の復調に利用可能な、任意の同期検波を用いた任意の復調方式である。遅延検波、同期検波及びそれらを用いた復調方式として、公知のものを用いることができるし、未公知のそれらを用いることもできる。例えば、本出願人が提案する、特願2009−182279号に記載された復調方式は同期検波を用いて実現されるが、特願2009−182279号に記載された復調方式を第2復調方式として用いることも可能である。 The first demodulation method is, for example, a demodulation method using delayed detection, and the second demodulation method is, for example, a demodulation method using synchronous detection. The demodulation method using delay detection here is an arbitrary demodulation method using arbitrary delay detection that can be used for demodulation of the OFDM signal, and the demodulation method using synchronous detection here is an OFDM signal demodulation method. Any demodulation method using any synchronous detection that can be used for demodulation. As delay detection, synchronous detection, and demodulation methods using them, known ones can be used, or those not known can be used. For example, the demodulation method described in Japanese Patent Application No. 2009-182279 proposed by the present applicant is realized using synchronous detection, but the demodulation method described in Japanese Patent Application No. 2009-182279 is used as the second demodulation method. It is also possible to use it.
遅延検波を用いた復調方式では、注目シンボルの受信信号を復調する際、注目シンボルの1シンボル前の受信信号を基準信号として用い、基準信号と注目シンボルの受信信号とを比較して注目シンボルの受信信号の位相を判定することで復調を行う。即ち例えば、遅延検波を用いた復調方式では、サブキャリア信号e(t,l)の復調を行う際、サブキャリア信号e(t−1,l)を基準信号として用い、基準信号としてのサブキャリア信号e(t−1,l)とサブキャリア信号e(t,l)とを比較することでサブキャリア信号e(t,l)の位相を判定し、これによって復調を行う。 In the demodulation method using delay detection, when demodulating the received signal of the target symbol, the received signal one symbol before the target symbol is used as a reference signal, and the reference signal and the received signal of the target symbol are compared to compare the received signal of the target symbol. Demodulation is performed by determining the phase of the received signal. That is, for example, in the demodulation system using delay detection, when demodulating the subcarrier signal e (t, l), the subcarrier signal e (t-1, l) is used as the reference signal, and the subcarrier as the reference signal is used. The phase of the subcarrier signal e (t, l) is determined by comparing the signal e (t-1, l) with the subcarrier signal e (t, l), and demodulation is performed thereby.
同期検波を用いた復調方式では、送信装置にて変調を行う際に使ったサブキャリアと位相が同期したサブキャリアを受信装置10の受信信号に基づき受信装置10内で再生することで、位相検波の基準となる位相信号を生成し、FFT処理部13の出力信号を該基準となる位相信号と比較することで復調を行う
In the demodulation method using the synchronous detection, the subcarrier whose phase is synchronized with that of the subcarrier used when the transmission device performs the modulation is reproduced in the
一般に、搬送波であるサブキャリアが正確に再生できる場合には、同期検波の方が遅延検波を用いる場合よりも受信特性が優れている。しかしながら、移動受信等によってフェージングが生じ、受信信号の位相が回転してしまうと搬送波が正確に再生できなくなって同期検波による受信特性が劣化する。遅延検波の方がフェージングの影響を受けにくいので、移動受信が行われる場合においては、通常、遅延検波の方が同期検波よりも受信特性が優れる。他方において、遅延検波を用いた場合、雑音が大きくなると急速に受信特性が劣化する。 In general, when subcarriers that are carrier waves can be accurately reproduced, synchronous detection has better reception characteristics than when delayed detection is used. However, when fading occurs due to mobile reception or the like and the phase of the received signal rotates, the carrier wave cannot be reproduced accurately, and the reception characteristics due to synchronous detection deteriorate. Since delay detection is less susceptible to fading, delay detection generally has better reception characteristics than synchronous detection when mobile reception is performed. On the other hand, when delay detection is used, reception characteristics deteriorate rapidly when noise increases.
図12(a)に、同期検波を用いた受信の特性と受信環境との対応関係を示し、図12(b)に、遅延検波を用いた受信の特性と受信環境との対応関係を示す。受信特性を単純に良又は不良で二値化した場合、同期検波の使用時には、雑音成分の大小に関わらず、静止受信における受信特性は良であり、移動受信における受信特性は不良である。遅延検波の使用時には、静止受信及び移動受信のどちらであっても、雑音成分が比較的大きいときの受信特性は不良であり、雑音成分が比較的小さいときの受信特性は良である。尚、ここにおける良及び不良とは、受信特性についての絶対的な量を表すものではなく、遅延検波と同期検波とを対比したときの相対量を表す。図12(a)及び(b)からも分かるように、雑音成分が小さいときには遅延検波の利用が適している一方で、雑音成分が大きいときには同期検波の利用が適している。これを考慮し、復調処理部15では雑音推定部14の推定結果に応じて上述のような復調方式の切り替えを行う。
FIG. 12A shows the correspondence between reception characteristics using synchronous detection and the reception environment, and FIG. 12B shows the correspondence between reception characteristics using delay detection and the reception environment. When the reception characteristic is simply binarized with good or bad, when using synchronous detection, the reception characteristic in stationary reception is good regardless of the magnitude of the noise component, and the reception characteristic in mobile reception is bad. When delay detection is used, the reception characteristics when the noise component is relatively large are poor in both stationary reception and mobile reception, and the reception characteristics when the noise component is relatively small are good. Here, “good” and “bad” do not represent absolute amounts of reception characteristics, but represent relative amounts when delay detection and synchronous detection are compared. As can be seen from FIGS. 12A and 12B, the use of delay detection is suitable when the noise component is small, while the use of synchronous detection is suitable when the noise component is large. Considering this, the
尚、上述の例では、信号点間の位置差に基づく量dif0〜dif3を、上記式(B0)〜式(B3)に従って求めているが、信号点間の位相角の差から量dif0〜dif3を求めるようにしても良いし、信号点間の位置差に依存する他の指標から量dif0〜dif3を求めるようにしても良い。 In the above example, the amounts dif0 to dif3 based on the positional difference between the signal points are obtained according to the above formulas (B0) to (B3). However, the amounts dif0 to dif3 are calculated from the phase angle difference between the signal points. May be obtained, or the amounts dif0 to dif3 may be obtained from other indices depending on the positional difference between signal points.
信号点間の位相角の差から量dif0〜dif3を求める場合、例えば、
信号点(pi0,pq0)の位相角と信号点(si0,sq0)の位相角との差の絶対値を信号点(pi0,pq0)及び(si0,sq0)間の位置差に基づく量dif0として求め、
信号点(pi0,pq0)の位相角と信号点(si1,sq1)の位相角との差の絶対値を信号点(pi0,pq0)及び(si1,sq1)間の位置差に基づく量dif1として求め、
信号点(pi0,pq0)の位相角と信号点(si2,sq2)の位相角との差の絶対値を信号点(pi0,pq0)及び(si2,sq2)間の位置差に基づく量dif2として求め、
信号点(pi0,pq0)の位相角と信号点(si3,sq3)の位相角との差の絶対値を信号点(pi0,pq0)及び(si3,sq3)間の位置差に基づく量dif3として求めることができる。
或る注目した信号点の位相角とは、図13に示す如く、線分211から半時計周り方向に線分212を見たときの、線分211と線分212の成す角度である。線分211は、IQ平面の原点を一方の端点としつつ該原点からI軸に沿ってI軸の正の方向へと伸びる線分であり、線分212は、IQ平面の原点及び注目した信号点を両端点とする線分である。
When obtaining the quantities dif0 to dif3 from the difference in phase angle between signal points, for example,
The absolute value of the difference between the phase angle of the signal point (pi0, pq0) and the phase angle of the signal point (si0, sq0) is defined as an amount dif0 based on the positional difference between the signal points (pi0, pq0) and (si0, sq0). Seeking
The absolute value of the difference between the phase angle of the signal point (pi0, pq0) and the phase angle of the signal point (si1, sq1) is defined as an amount dif1 based on the positional difference between the signal points (pi0, pq0) and (si1, sq1). Seeking
The absolute value of the difference between the phase angle of the signal point (pi0, pq0) and the phase angle of the signal point (si2, sq2) is defined as an amount dif2 based on the positional difference between the signal points (pi0, pq0) and (si2, sq2). Seeking
The absolute value of the difference between the phase angle of the signal point (pi0, pq0) and the phase angle of the signal point (si3, sq3) is defined as an amount dif3 based on the positional difference between the signal points (pi0, pq0) and (si3, sq3). Can be sought.
The phase angle of a signal point of interest is an angle formed by the
また、上述の例では、2つのサブキャリア信号の対比によって雑音評価値difを算出する際、周波数方向において隣接する同一シンボル内のサブキャリア信号e(t,l)及びe(t,l+1)を、対比されるべき2つのサブキャリア信号として取り扱っているが、対比されるべき2つのサブキャリア信号は、周波数方向において2以上のキャリア番号分だけ離れていても構わない。即ち、同一シンボル内のサブキャリア信号e(t,l)及びe(t,l+lB)を対比することで雑音評価値difを算出してもよい(lBは2以上の整数)。この場合、サブキャリア信号e(t,l)の信号点からpi0及びpq0が定まり、サブキャリア信号e(t,l+lB)の信号点からsi0〜si3及びsq0〜sq3が定まる。 In the above example, when the noise evaluation value dif is calculated by comparing two subcarrier signals, the subcarrier signals e (t, l) and e (t, l + 1) in the same symbol adjacent in the frequency direction are calculated. The two subcarrier signals to be compared are treated as two subcarrier signals, but the two subcarrier signals to be compared may be separated by two or more carrier numbers in the frequency direction. That is, the noise evaluation value dif may be calculated by comparing the subcarrier signals e (t, l) and e (t, l + l B ) in the same symbol (l B is an integer of 2 or more). In this case, pi0 and pq0 are determined from the signal points of the subcarrier signal e (t, l), and si0 to si3 and sq0 to sq3 are determined from the signal points of the subcarrier signal e (t, l + l B ).
図14は、同一シンボル内のサブキャリア信号e(t,l)及びe(t,l+2)から雑音評価値difを求める場合における、対比されるサブキャリア信号のペアを示している(この場合、lBは2である)。図14に示す例の場合、雑音推定部14は、任意の時間番号tについて、e(t,0)及びe(t,2)のペア、e(t,1)及びe(t,3)のペア、e(t,2)及びe(t,4)のペア、e(t,3)及びe(t,5)のペア、・・・、e(t,L−3)及びe(t,L−1)のペアに対する雑音評価値difを求めることができる。
FIG. 14 shows a pair of subcarrier signals to be compared when the noise evaluation value dif is obtained from the subcarrier signals e (t, l) and e (t, l + 2) in the same symbol (in this case, l B is 2). In the case of the example illustrated in FIG. 14, the
或るいは、雑音評価値difを算出するために対比されるべき2つのサブキャリア信号は、それらが属する時間番号tが互いに異なる2つのサブキャリア信号であっても良い。即ち、サブキャリア信号e(t,l)及びe(t+tB,l)を対比することで雑音評価値difを算出してもよい(tBは1以上の整数)。この場合、サブキャリア信号e(t,l)の信号点からpi0及びpq0が定まり、サブキャリア信号e(t+tB,l)の信号点からsi0〜si3及びsq0〜sq3が定まる。 Alternatively, the two subcarrier signals to be compared to calculate the noise evaluation value dif may be two subcarrier signals having different time numbers t to which they belong. That is, the noise evaluation value dif may be calculated by comparing the subcarrier signals e (t, l) and e (t + t B , l) (t B is an integer of 1 or more). In this case, pi0 and pq0 are determined from the signal points of the subcarrier signal e (t, l), and si0 to si3 and sq0 to sq3 are determined from the signal points of the subcarrier signal e (t + t B , l).
図15は、時間方向に隣接する2つのサブキャリア信号e(t,l)及びe(t+1,l)から雑音評価値difを求める場合における、対比されるサブキャリア信号のペアを示している(この場合、tBは1である)。図15に示す例の場合、雑音推定部14は、任意のキャリア番号lについて、e(0,l)及びe(1,l)のペア、e(1,l)及びe(2,l)のペア、e(2,l)及びe(3,l)のペア、・・・に対する雑音評価値difを次々と求めることができる。但し、この場合、e(0,l)及びe(1,l)間で基準点の種類が異なるため、その基準点の種類の相違(第1基準点と第2基準点の相違)を打ち消すための補正を、雑音評価値difの導出過程に含める必要がある。
FIG. 15 shows a pair of subcarrier signals to be compared when a noise evaluation value dif is obtained from two subcarrier signals e (t, l) and e (t + 1, l) adjacent in the time direction ( In this case, t B is 1.) In the case of the example illustrated in FIG. 15, the
具体的には、サブキャリア信号e(0,l)及びe(1,l)の雑音評価値difを求める場合、
e(0,l)の同相成分及び直交成分を夫々pi0及びpq0に代入し、
IQ平面上でe(1,l)を45°だけ回転して得た信号の同相成分及び直交成分を夫々si0及びsq0に代入し、
IQ平面上でe(1,l)を135°だけ回転して得た信号の同相成分及び直交成分を夫々si1及びsq1に代入し、
IQ平面上でe(1,l)を225°だけ回転して得た信号の同相成分及び直交成分を夫々si2及びsq2に代入し、
IQ平面上でe(1,l)を315°だけ回転して得た信号の同相成分及び直交成分を夫々si3及びsq3に代入した上で、上記式(B0)〜(B3)に基づき、或いは、上記の位相角の差の算出を介して、雑音評価値difを求めれば良い。
Specifically, when obtaining the noise evaluation value dif of the subcarrier signals e (0, l) and e (1, l),
Substituting the in-phase and quadrature components of e (0, l) into pi0 and pq0, respectively,
Substituting the in-phase component and the quadrature component of the signal obtained by rotating e (1, l) by 45 ° on the IQ plane into si0 and sq0, respectively.
Substituting the in-phase component and the quadrature component of the signal obtained by rotating e (1, l) by 135 ° on the IQ plane into si1 and sq1, respectively.
Substituting the in-phase component and the quadrature component of the signal obtained by rotating e (1, l) by 225 ° on the IQ plane into si2 and sq2, respectively.
Substituting the in-phase component and the quadrature component of the signal obtained by rotating e (1, l) by 315 ° on the IQ plane into si3 and sq3, respectively, based on the above formulas (B0) to (B3), or The noise evaluation value dif may be obtained through the above calculation of the phase angle difference.
第1基準点群を形成する4つの第1基準点の内、何れかの位置を特定基準位置と捉える。仮に、特定基準位置が(1/√2,1/√2)であるとした場合、
e(1,l)を45°だけ回転させる処理は、第2信号点(0,1)の位置を特定基準位置へと移動させるための回転処理に等しく、
e(1,l)を135°だけ回転させる処理は、第2信号点(−1,0)の位置を特定基準位置へと移動させるための回転処理に等しく、
e(1,l)を225°だけ回転させる処理は、第2信号点(0,−1)の位置を特定基準位置へと移動させるための回転処理に等しく、
e(1,l)を315°だけ回転させる処理は、第2信号点(1,0)の位置を特定基準位置へと移動させるための回転処理に等しい。
Any one of the four first reference points forming the first reference point group is regarded as a specific reference position. If the specific reference position is (1 / √2, 1 / √2),
The process of rotating e (1, l) by 45 ° is equivalent to the rotation process for moving the position of the second signal point (0, 1) to the specific reference position.
The process of rotating e (1, l) by 135 ° is equivalent to the rotation process for moving the position of the second signal point (−1, 0) to the specific reference position.
The process of rotating e (1, l) by 225 ° is equivalent to the rotation process for moving the position of the second signal point (0, −1) to the specific reference position.
The process of rotating e (1, l) by 315 ° is equivalent to the rotation process for moving the position of the second signal point (1, 0) to the specific reference position.
e(0,l)及びe(1,l)に対する雑音評価値difの算出方法を説明したが、e(1,l)及びe(2,l)に対するそれやe(2,l)及びe(3,l)に対するそれも同様である。 Although the calculation method of the noise evaluation value dif for e (0, l) and e (1, l) has been described, it is similar to that for e (1, l) and e (2, l), and e (2, l) and e. The same applies to (3, l).
本実施形態によれば、既知の信号がパイロット信号として多重されていなくても、雑音成分の大きさを良好に推定することが可能となる。既知信号はまばらに存在するため情報量が少なく、既知信号のみを利用した雑音推定方法では推定精度が低くなる可能性があるが、本実施形態の方法では全てのサブキャリアを用いることができるため推定精度が高くなる。また、既知の固定パターンを有する基準信号が伝送フレーム先頭のヘッダ部に内包されている場合、ヘッダ部内の信号を本来の信号(既知の固定パターン)と比較することで雑音成分の大きさを推定することも可能であるが、そのような推定を行う場合、推定の時間間隔は、原理上、時間的に隣接するヘッダ部の時間間隔よりも短くすることはできない。一方、本実施形態の雑音推定部14によれば、隣接ヘッダ部の時間間隔よりも短い時間間隔で雑音成分の大きさを推定することが可能となる。そして、雑音成分の大きさの推定値に応じて復調方式を適切に切り替えることにより、受信特性の向上が図られる。
According to this embodiment, even if a known signal is not multiplexed as a pilot signal, the magnitude of the noise component can be estimated well. Since known signals exist sparsely, the amount of information is small, and the noise estimation method using only known signals may reduce the estimation accuracy. However, the method of this embodiment can use all subcarriers. The estimation accuracy is increased. Also, when a reference signal having a known fixed pattern is included in the header part at the beginning of the transmission frame, the noise component size is estimated by comparing the signal in the header part with the original signal (known fixed pattern). However, when performing such estimation, in principle, the estimation time interval cannot be shorter than the time interval between header portions that are temporally adjacent. On the other hand, according to the
また、同一シンボル内の隣接サブキャリア信号の振幅はそれほど変動しない。このため、図9に示す如く、同一シンボル内の隣接サブキャリア信号の比較を介して雑音推定を行う場合には、正確な雑音推定が可能である。また、同一シンボル内の隣接サブキャリア信号の比較を介して雑音推定を行う場合には、特に図15に示す方法と比べて、雑音評価値dif算出用のデータを記憶しておくためのメモリ容量が少なくて済む。 In addition, the amplitude of adjacent subcarrier signals in the same symbol does not vary so much. Therefore, as shown in FIG. 9, when noise estimation is performed through comparison of adjacent subcarrier signals within the same symbol, accurate noise estimation is possible. Further, when noise estimation is performed through comparison of adjacent subcarrier signals within the same symbol, the memory capacity for storing data for calculating the noise evaluation value dif, particularly compared to the method shown in FIG. Is less.
<<変形等>>
上述の説明文中に示される具体的な数値は、単なる例示であって、当然の如く、それらを様々な数値に変更することができる。上述の実施形態の変形例または注釈事項として、以下に、注釈1〜注釈4を記す。各注釈に記載した内容は、矛盾なき限り、任意に組み合わせることが可能である。
<< Deformation, etc. >>
Specific numerical values shown in the above description are merely examples, and as a matter of course, they can be changed to various numerical values. As modifications or annotations of the above-described embodiment, notes 1 to 4 are described below. The contents described in each comment can be arbitrarily combined as long as there is no contradiction.
[注釈1]
送信装置にて用いられる変調方式がDQPSKである場合の実施形態を上述したが、変調方式はDQPSKに限定されず、上記送信装置にて任意の変調方式を利用することが可能である。例えば、QPSKや16QAM(16 Quadrature Amplitude Modulation)をDQPSKの代わりに用いることができる。
[Note 1]
The embodiment in which the modulation scheme used in the transmission apparatus is DQPSK has been described above. However, the modulation scheme is not limited to DQPSK, and any modulation scheme can be used in the transmission apparatus. For example, QPSK or 16QAM (16 Quadrature Amplitude Modulation) can be used instead of DQPSK.
[注釈2]
図3の受信装置10に、伝送路歪みを低減するための等化処理部(不図示)を追加することも可能である。この等化処理部は、FFT処理部13の出力信号に含まれる、伝送路歪みの成分を低減する。その低減が施された後のFFT処理部13の出力信号を、復調処理部15に与えるようにしても良い。
[Note 2]
It is also possible to add an equalization processing unit (not shown) for reducing transmission path distortion to the receiving
[注釈3]
上述の実施形態では、OFDM信号にパイロット信号が挿入されていないことを仮定したが、ISDB−Tのように、OFDM信号にパイロット信号が挿入されている場合においても、上述の実施形態にて述べた方法は適用可能である。
[Note 3]
In the above-described embodiment, it is assumed that the pilot signal is not inserted into the OFDM signal. However, even in the case where the pilot signal is inserted into the OFDM signal as in ISDB-T, the above-described embodiment describes. These methods are applicable.
[注釈4]
図3の受信装置10は、ハードウェア、或いは、ハードウェアとソフトウェアの組み合わせによって実現可能である。ソフトウェアを用いて受信装置10を構成する場合、ソフトウェアにて実現される部位についてのブロック図は、その部位の機能ブロック図を表すことになる。ソフトウェアを用いて実現される機能をプログラムとして記述し、該プログラムをプログラム実行装置(例えばコンピュータ)上で実行することによって、その機能を実現するようにしてもよい
[Note 4]
The receiving
10 受信装置
11 受信アンテナ
12 チューナ部
13 FFT処理部
14 雑音推定部
15 復調処理部
DESCRIPTION OF
Claims (6)
当該受信装置の受信信号に含まれる、複数のサブキャリアによる複数のサブキャリア信号を比較することにより、前記受信信号の雑音成分の大きさを推定する雑音推定部を備え、
前記複数のサブキャリアは、周波数方向又は時間方向において互いに異なる複数のサブキャリアである
ことを特徴とする受信装置。 In a receiving apparatus that receives a signal modulated using a method of multiplexing subcarrier groups orthogonal to each other,
A noise estimation unit that estimates a magnitude of a noise component of the reception signal by comparing a plurality of subcarrier signals by a plurality of subcarriers included in the reception signal of the reception device,
The receiving apparatus, wherein the plurality of subcarriers are a plurality of subcarriers different from each other in a frequency direction or a time direction.
前記復調処理部は、前記雑音推定部の推定結果に応じて、前記受信信号を復調するための復調方式を切り替える
ことを特徴とする請求項1に記載の受信装置。 A demodulating processor for demodulating the received signal;
The receiving apparatus according to claim 1, wherein the demodulation processing unit switches a demodulation method for demodulating the reception signal in accordance with an estimation result of the noise estimation unit.
推定された雑音成分の大きさが比較的小さい場合、遅延検波を用いた復調方式で前記受信信号の復調を行い、
推定された雑音成分の大きさが比較的大きい場合、同期検波を用いた復調方式で前記受信信号の復調を行う
ことを特徴とする請求項2に記載の受信装置。 The demodulation processing unit includes:
When the estimated noise component size is relatively small, the received signal is demodulated by a demodulation method using delayed detection,
The receiving apparatus according to claim 2, wherein when the estimated noise component is relatively large, the received signal is demodulated by a demodulation method using synchronous detection.
前記雑音推定部は、IQ平面上における前記第1のサブキャリア信号の信号点と前記第2のサブキャリア信号の信号点との比較を介して、前記雑音成分の大きさを推定する
ことを特徴とする請求項1〜請求項3の何れかに記載の受信装置。 The plurality of subcarrier signals include first and second subcarrier signals;
The noise estimation unit estimates the magnitude of the noise component through a comparison between a signal point of the first subcarrier signal and a signal point of the second subcarrier signal on an IQ plane. The receiving device according to any one of claims 1 to 3.
前記雑音推定部は、
前記第1のサブキャリア信号の信号点と前記第2のサブキャリア信号の信号点との位置差に基づく量を求めると共に、
前記第1のサブキャリア信号の信号点と、前記第1の位置を前記第nの位置に移動させる処理を前記第2のサブキャリア信号の信号点に施して得た信号点と、の位置差に基づく量を、n=2、3、・・・、Nの夫々に対して求め、
求めた量の内、最小の量を用いて前記雑音成分の大きさを推定する
ことを特徴とする請求項4に記載の受信装置。 The ideal position of the signal point of the second subcarrier signal on the IQ plane is any one of the first to Nth positions (N is an integer of 2 or more),
The noise estimator is
Obtaining an amount based on a positional difference between the signal point of the first subcarrier signal and the signal point of the second subcarrier signal;
Position difference between the signal point of the first subcarrier signal and the signal point obtained by applying the process of moving the first position to the nth position on the signal point of the second subcarrier signal For each of n = 2, 3,..., N,
The receiving apparatus according to claim 4, wherein the magnitude of the noise component is estimated using a minimum amount among the obtained amounts.
当該受信装置の受信信号を復調する復調処理部を備え、
前記復調処理部は、前記受信信号に含まれる、複数のサブキャリアによる複数のサブキャリア信号の比較結果に基づいて、前記受信信号を復調するための復調方式を切り替える
ことを特徴とする受信装置。 In a receiving apparatus that receives a signal modulated using a method of multiplexing subcarrier groups orthogonal to each other,
A demodulation processing unit for demodulating the received signal of the receiving device;
The receiving apparatus, wherein the demodulation processing unit switches a demodulation method for demodulating the received signal based on a comparison result of a plurality of subcarrier signals by a plurality of subcarriers included in the received signal.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009242618A JP2011091563A (en) | 2009-10-21 | 2009-10-21 | Receiver |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009242618A JP2011091563A (en) | 2009-10-21 | 2009-10-21 | Receiver |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2011091563A true JP2011091563A (en) | 2011-05-06 |
Family
ID=44109415
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009242618A Pending JP2011091563A (en) | 2009-10-21 | 2009-10-21 | Receiver |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2011091563A (en) |
-
2009
- 2009-10-21 JP JP2009242618A patent/JP2011091563A/en active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4284813B2 (en) | OFDM receiver | |
| JP2007202081A (en) | Ofdm demodulator and ofdm demodulation method | |
| US8416844B2 (en) | OFDM receiving apparatus, OFDM receiving method, OFDM receiving circuit, integrated circuit, and program | |
| KR20010042708A (en) | Method and apparatus for fine frequency synchronization in multi-carrier demodulation systems | |
| US20040218519A1 (en) | Apparatus and method for estimation of channel state information in OFDM receivers | |
| KR100347966B1 (en) | Echo phase offset correction in a multi-carrier demodulation system | |
| JP2007028201A (en) | Apparatus and method for calculating doppler frequency and ofdm demodulation apparatus | |
| JP2002523978A (en) | Method and apparatus for transmitting information symbols using multiple carriers and method and apparatus for receiving information symbols | |
| US8363755B2 (en) | Signal receiving apparatus, method, program and system | |
| JP4774160B2 (en) | OFDM receiver | |
| JP2004356923A (en) | Semiconductor integrated circuit and demodulator | |
| KR20110108364A (en) | Method and apparatus for estimating phase noise in an ofdm transmission system | |
| US8630371B1 (en) | Channel estimation using linear phase estimation | |
| US20050111600A1 (en) | Orthogonal frequency division multiplexing (OFDM) receiver, OFDM receiving circuit and OFDM diversity reception method | |
| JP2005286362A (en) | Digital receiver | |
| JP2011091563A (en) | Receiver | |
| Assaf et al. | Sample Clock Offset Compensation in the fifth-generation new radio Downlink | |
| JP5566223B2 (en) | Diversity receiving apparatus and diversity receiving method | |
| JP5199179B2 (en) | Semiconductor integrated circuit and received signal processing method | |
| JP2003134010A (en) | Method for equalizing digital modulated signal and demodulator using the same | |
| US8699632B2 (en) | OFDM reception device, OFDM reception circuit, OFDM reception method, and OFDM reception program | |
| JP5174741B2 (en) | Semiconductor integrated circuit and received signal processing method | |
| JP2004304454A (en) | Ofdm signal demodulator and method | |
| JP2009302793A (en) | Carrier frequency error detector | |
| Kang et al. | An adaptive detection and suppression of co-channel interference in DVB-T/H system |