JP2009276261A - Rotational angle detection device and rotating machine - Google Patents
Rotational angle detection device and rotating machine Download PDFInfo
- Publication number
- JP2009276261A JP2009276261A JP2008129107A JP2008129107A JP2009276261A JP 2009276261 A JP2009276261 A JP 2009276261A JP 2008129107 A JP2008129107 A JP 2008129107A JP 2008129107 A JP2008129107 A JP 2008129107A JP 2009276261 A JP2009276261 A JP 2009276261A
- Authority
- JP
- Japan
- Prior art keywords
- hall sensor
- radial
- hall
- circumferential
- magnet rotor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 title claims abstract description 67
- 230000005291 magnetic effect Effects 0.000 claims abstract description 253
- 230000004907 flux Effects 0.000 claims abstract description 95
- 230000002093 peripheral effect Effects 0.000 claims description 13
- 230000002194 synthesizing effect Effects 0.000 claims description 4
- 230000008859 change Effects 0.000 description 7
- 230000035945 sensitivity Effects 0.000 description 5
- 230000007423 decrease Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000005405 multipole Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 239000011230 binding agent Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005415 magnetization Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000000465 moulding Methods 0.000 description 2
- 238000010606 normalization Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 239000006247 magnetic powder Substances 0.000 description 1
- 229910001172 neodymium magnet Inorganic materials 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 102200082816 rs34868397 Human genes 0.000 description 1
- 239000013585 weight reducing agent Substances 0.000 description 1
Images
















Landscapes
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
Description
本発明は、ホールセンサを用いて回転軸等の回転角度を検出する回転角度検出装置および回転機に関する。 The present invention relates to a rotation angle detection device and a rotating machine that detect a rotation angle of a rotation shaft or the like using a hall sensor.
特許文献1には、そのFigure4に示すように、その軸で回転する円筒状の永久磁石1(内周側の磁束を示す矢印から2極磁石と推定される。)と、2つの感磁素子(ホールセンサ)2,3と、処理回路4とで構成される角度ポジションセンサーが開示されている。前記2つの感磁素子は概略的に同じポイントに配置されており、磁界の径方向成分と磁界の周方向成分を測って、2つのサイン波状信号を提供する。
In
特許文献2には、その図1に示すように、回転軸を有する2極円板状の磁石2と、第1ホール素子3と、第2ホール素子4とで構成される回転角度検出装置が開示されている。第1ホール素子3の磁気検出面に対して第2ホール素子4の磁気検出面は略直角方向に向けて配置されている。
In
特許文献3には、その図5に示すように、貫通シャフトと2極のリング磁石11を有する回転体と、前記磁石表面の上方の空間点に設置された感磁部とで構成される回転角度センサが開示されている。前記感磁部は、磁石によって生じる磁束密度の当該磁石の表面に平行であり且つ互いに直交する2軸方向の成分Bx及びByを各々感磁する2つのホールセンサ(X軸方向センサ12xとY軸方向センサ12y)を有する。
In Patent Document 3, as shown in FIG. 5, a rotation composed of a rotating body having a penetrating shaft and a two-
特許文献4には、その図6及び図7に示すように、軸方向に所定の空隙を隔てて磁性シャフト1に固定した2個の磁石2(各々、2極磁石である。)と、平行配置した前記2個の磁石2と前記磁性シャフト1による閉磁場内に配置された1つのチップ10とで構成される回転角度検出装置が開示されている。前記1つのチップ10内には、第1磁気センサ及び第2磁気センサが90度傾けてL字型に内蔵されている、
In Patent Document 4, as shown in FIGS. 6 and 7, two magnets 2 (each of which is a dipole magnet) fixed to the
特許文献5には、その図9に示すように、2極の永久磁石2を有する回転体1と、磁界検出素子4とで構成される磁気式エンコーダ装置が開示されている。前記磁界検出素子4は、磁束密度成分Brを検知する径方向感磁部45と磁束密度成分Bθを検知する周方向感磁部46を備え、永久磁石2の回転軸の向きからみて、十字型となるよう重ねて配置されている。
In Patent Document 5, as shown in FIG. 9, a magnetic encoder device including a rotating
特許文献6には、その図4及び6に示すように、回転軸403に支持された円板状で2極の磁石400と、前記磁石400の円周付近に磁気センサA及びB(ホール素子)を配置した回転角度センサが開示されている。一方の構成では回転軸の方向に磁気センサがずらして配置され、他方の構成では回転軸の方向に磁気センサをずらすと共にその面を回転軸に対して斜めに傾斜して配置している。磁界円周方向でみると、円板の中心Oと磁気センサAの略中心とを通る直線412、および中心Oと磁気センサBの略中心とを通る直線411とがなす角度が機械角で概ね90deg.になるように配置されている。ここで、機械角とは円板の周囲を1周する角度を360deg.とするものである。 In Patent Document 6, as shown in FIGS. 4 and 6, a disc-shaped two-pole magnet 400 supported by a rotating shaft 403, and magnetic sensors A and B (Hall elements) around the circumference of the magnet 400. ) Is disclosed. In one configuration, the magnetic sensor is shifted in the direction of the rotation axis, and in the other configuration, the magnetic sensor is shifted in the direction of the rotation axis and the surface thereof is inclined with respect to the rotation axis. When viewed in the circumferential direction of the magnetic field, the angle formed by the straight line 412 passing through the center O of the disk and the approximate center of the magnetic sensor A and the straight line 411 passing through the center O and the approximate center of the magnetic sensor B is a mechanical angle. 90 deg. It is arranged to be. Here, the mechanical angle refers to an angle of 360 degrees around the circumference of the disk. It is what.
特許文献1のFigure4の説明によると、2つの感磁素子2,3によって測定された信号は、処理回路4によって処理される。
しかし、磁石の角度位置に比例する電気信号に変換するため、前記処理回路4は、2つの素子について復号(decodage)及び正規化(normalisation)を行う。すなわち、2つのホールセンサから得る出力信号の正規化は処理回路4で行われている。従って、2つのホールセンサの配置によって、磁界の径方向成分を測るホールセンサの出力信号に対して磁界の周方向成分を測るホールセンサの出力信号を正規化することは開示されていない。より高い精度の回転角度を検出するための構成とは言えない。
According to FIG. 4 of
However, in order to convert it into an electrical signal proportional to the angular position of the magnet, the processing circuit 4 performs decoding and normalization on the two elements. That is, normalization of output signals obtained from the two hall sensors is performed by the processing circuit 4. Therefore, it is not disclosed to normalize the output signal of the Hall sensor that measures the circumferential component of the magnetic field with respect to the output signal of the Hall sensor that measures the radial component of the magnetic field by the arrangement of the two Hall sensors. It cannot be said to be a configuration for detecting a rotation angle with higher accuracy.
特許文献2によると、第1ホール素子3と第2ホール素子4を一ヶ所に配置することで搭載スペースを小さくし、搭載性を高める。そして、温度変化による出力ズレを略同等にすることで安定した角度精度が得られると説明している。
しかし、磁石2の周方向において、第1ホール素子3の感磁中心と第2ホール素子4の感磁中心は所定角度Δθ1ずれている。このずれにより、一方のホール素子の感磁中心が受ける磁束密度成分の変化に対して、他方のホール素子の感磁中心が受ける磁束密度成分の変化は、所定角度の遅延又は先行を生じる。このズレによって回転角度検出装置で測定する回転角度に誤差を生じるという問題がある。より高い精度の回転角度を検出するための構成とは言えない。
According to
However, in the circumferential direction of the
なお、特許文献2の図7には、1つのチップ8の内部に第1、第2ホール素子3a,4aを隣接配置した回転角度検出装置が開示されている。しかし、磁石2の周方向において2つのホール素子の感磁中心が所定角度Δθ2ずれていることに変わりはない(Δθ1>Δθ2)。1チップ内に2つのホール素子を直交状態で組み込み内蔵させることは、1つのホール素子を内蔵するチップを2つ用いることに比べて、製造工数がかかるという問題もある。
FIG. 7 of
特許文献3の図5によると、X軸方向センサ12xとY軸方向センサ12yは軸方向からみて十字となるように組まれている。この形態から、2つのホールセンサを容易し、各々に切り欠きを形成し、切り欠き同士を差し込んで十字型のセンサを形成していると推定される。
しかし、十字型に形成すると、X軸方向センサ12xの感磁中心を十字型センサの中心に配置すると、Y軸方向センサ12yの感磁中心は十字型センサの中心からズレてしまうという問題がある。すなわち、磁石の周方向において、2つのセンサの感磁中心が所定角度Δθ3ずれることになり、回転角度検出装置で測定する回転角度に誤差を生じる。より高い精度の回転角度を検出するための構成とは言えない。
According to FIG. 5 of Patent Document 3, the X-axis direction sensor 12x and the Y-axis direction sensor 12y are assembled so as to form a cross when viewed from the axial direction. From this form, it is presumed that the two Hall sensors are facilitated, a notch is formed in each, and the notch is inserted into a cross-shaped sensor.
However, if it is formed in a cross shape, if the magnetic sensitive center of the X-axis direction sensor 12x is disposed at the center of the cross-shaped sensor, the magnetic sensitive center of the Y-axis direction sensor 12y is displaced from the center of the cross-shaped sensor. . That is, in the circumferential direction of the magnet, the magnetic sensitive centers of the two sensors deviate by a predetermined angle Δθ 3 , and an error occurs in the rotation angle measured by the rotation angle detection device. It cannot be said to be a configuration for detecting a rotation angle with higher accuracy.
特許文献4の図6及び図7をみると、磁石2の周方向において、第1磁気センサ3の感磁中心と第2磁気センサ4の感磁中心は所定角度Δθ4ずれている。したがって。回転角度検出装置で測定する回転角度に誤差を生じるという問題がある。より高い精度の回転角度を検出するための構成とは言えない。
なお、第1及び第2磁気センサ(2つのホールセンサ)を内蔵したチップを傾斜角αで傾けているが、磁性シャフトが及ぼす磁気的な影響によって生じる出力波高のズレを抑制し、波高を揃えることを目的としている。すなわち1個の磁石による磁束に対応した角度精度の向上を目的とするものではない。さらに、ホールセンサを内蔵したチップを傾斜角αで傾けるときに、回転の軸芯は前記磁石2の径方向に相当する。ホールセンサの感磁面を傾斜させるときに、回転の軸芯を前記磁石2の周方向とする構成は開示されていない。
Referring to FIG. 6 and FIG. 7 of Patent Document 4, in the circumferential direction of the
Although the chip incorporating the first and second magnetic sensors (two Hall sensors) is tilted at the tilt angle α, the deviation of the output wave height caused by the magnetic effect exerted by the magnetic shaft is suppressed, and the wave heights are made uniform. The purpose is that. That is, it is not intended to improve the angular accuracy corresponding to the magnetic flux by one magnet. Further, when the chip incorporating the Hall sensor is tilted at the tilt angle α, the axis of rotation corresponds to the radial direction of the
特許文献5の図9(b)の説明には、「磁界検出素子4の径方向感磁部45と周方向感磁部46の検出感度および配置位置には、わずかに差異があるため、出力V’θとV’rの振幅値は若干異なる。・・・なお、図10に示した増幅器54および55を信号処理回路5の中に設け、増幅器54のゲインを振幅比αに応じて調整して出力V’rから出力Vrを得て角度演算回路56に入力し、角度信号θを得る。」と記載されている。
したがって、2つのホールセンサの配置によって、磁界の径方向成分を測るホールセンサの出力信号の振幅値と、磁界の周方向成分を測るホールセンサの出力信号の振幅値とを同じにすること(すなわち、正規化すること。)は開示されていない。より高い精度の回転角度を検出するための構成とは言えない。
The description of FIG. 9B of Patent Document 5 states that “the detection sensitivity and the arrangement position of the radial direction magnetic sensing part 45 and the circumferential direction magnetic sensing part 46 of the magnetic field detection element 4 are slightly different, so that the output The amplitude values of V′θ and V′r are slightly different .... The amplifiers 54 and 55 shown in FIG. 10 are provided in the signal processing circuit 5, and the gain of the amplifier 54 is adjusted according to the amplitude ratio α. The output Vr is obtained from the output V′r and input to the angle calculation circuit 56 to obtain the angle signal θ ”.
Therefore, by arranging the two Hall sensors, the amplitude value of the output signal of the Hall sensor that measures the radial component of the magnetic field is made equal to the amplitude value of the output signal of the Hall sensor that measures the circumferential component of the magnetic field (that is, Normalize.) Is not disclosed. It cannot be said to be a configuration for detecting a rotation angle with higher accuracy.
特許文献6には、2つのホールセンサの面は、磁石の周方向または径方向に対して同様の向きとなるように配置されている。したがって、2つのホールセンサの配置によって、磁界の径方向成分を測るホールセンサの出力信号の振幅値と、磁界の周方向成分を測るホールセンサの出力信号の振幅値とを同じにすること(すなわち、正規化すること。)は開示されていない。より高い精度の回転角度を検出するための構成とは言えない。 In Patent Document 6, the surfaces of the two Hall sensors are arranged in the same direction with respect to the circumferential direction or radial direction of the magnet. Therefore, by arranging the two Hall sensors, the amplitude value of the output signal of the Hall sensor that measures the radial component of the magnetic field is made equal to the amplitude value of the output signal of the Hall sensor that measures the circumferential component of the magnetic field (that is, Normalize.) Is not disclosed. It cannot be said to be a configuration for detecting a rotation angle with higher accuracy.
そこで、本発明の目的は、回転角度の検出精度が高い回転角度検出装置および回転機を提供することを目的とする。 Therefore, an object of the present invention is to provide a rotation angle detection device and a rotating machine with high detection accuracy of the rotation angle.
本発明の回転角度検出装置は、N極対の磁極を有する磁石回転子(但し、Nは2以上の整数である。)と、前記磁石回転子から印加される磁束に応じて磁石回転子の回転角度を検出するための2個のホールセンサとを備え、
前記2個のホールセンサは、感磁軸を前記磁石回転子の径方向に向けて配置した径方向用ホールセンサと、感磁軸を前記磁石回転子の周方向に向けて配置した周方向用ホールセンサとで構成され、
前記径方向用ホールセンサが受ける磁束密度成分の振幅と前記周方向用ホールセンサが受ける磁束密度成分の振幅とが同じになるように、前記径方向用ホールセンサ及び前記周方向用ホールセンサが配置されていることを特徴とする。
ここで、“センサの受ける磁束密度成分”とは、ホールセンサで検知できる磁束密度成分であり、ホールセンサの感磁面に直交する磁束密度成分に相当する。
The rotation angle detection device of the present invention includes a magnet rotor having N pole pairs of magnetic poles (where N is an integer equal to or greater than 2) and a magnet rotor according to the magnetic flux applied from the magnet rotor. With two Hall sensors for detecting the rotation angle,
The two Hall sensors are a radial Hall sensor in which a magnetic sensitive axis is arranged in the radial direction of the magnet rotor, and a circumferential direction in which a magnetic sensitive axis is arranged in the circumferential direction of the magnet rotor. It consists of a hall sensor and
The radial hall sensor and the circumferential hall sensor are arranged so that the amplitude of the magnetic flux density component received by the radial hall sensor and the amplitude of the magnetic flux density component received by the circumferential hall sensor are the same. It is characterized by being.
Here, the “magnetic flux density component received by the sensor” is a magnetic flux density component that can be detected by the Hall sensor, and corresponds to a magnetic flux density component orthogonal to the magnetic sensitive surface of the Hall sensor.
本発明の他の回転角度検出装置は、N極対の磁極を有する磁石回転子(但し、Nは2以上の整数である。)と、前記磁石回転子から印加される磁束に応じて磁石回転子の回転角度を検出するための2個のホールセンサとを備え、
前記2個のホールセンサは、感磁軸を前記磁石回転子の径方向に向けて配置した径方向用ホールセンサと、感磁軸を前記磁石回転子の周方向に向けて配置した周方向用ホールセンサとで構成され、
前記径方向用ホールセンサ及び前記周方向用ホールセンサは、磁石回転子の周方向で(2s1−1)×360/(4N)deg.の角度(但し、s1は0を含む自然数である。)を為すように設けられ、
前記径方向用ホールセンサが受ける磁束密度成分の振幅と前記周方向用ホールセンサが受ける磁束密度成分の振幅とが同じになるように、前記径方向用ホールセンサ及び前記周方向用ホールセンサが配置されており、
前記径方向用ホールセンサ及び前記周方向用ホールセンサの出力を合成することにより、回転角度を検出することを特徴とする。
Another rotation angle detection device according to the present invention includes a magnet rotor having N pole pairs of magnetic poles (where N is an integer of 2 or more), and magnet rotation according to the magnetic flux applied from the magnet rotor. Two Hall sensors for detecting the rotation angle of the child,
The two Hall sensors are a radial Hall sensor in which a magnetic sensitive axis is arranged in the radial direction of the magnet rotor, and a circumferential direction in which a magnetic sensitive axis is arranged in the circumferential direction of the magnet rotor. It consists of a hall sensor and
The radial hall sensor and the circumferential hall sensor are (2s 1 −1) × 360 / (4N) deg. (Where s 1 is a natural number including 0),
The radial hall sensor and the circumferential hall sensor are arranged so that the amplitude of the magnetic flux density component received by the radial hall sensor and the amplitude of the magnetic flux density component received by the circumferential hall sensor are the same. Has been
The rotation angle is detected by combining the outputs of the radial hall sensor and the circumferential hall sensor.
磁石回転子の磁極外周面とホールセンサの感磁中心との距離rについて、前記径方向用ホールセンサのrが前記周方向用ホールセンサのrより大きくなるように配置されていることが好ましい。ここで、“磁極外周面”は、磁石の部分の外周面を指す。 The distance r between the magnetic pole outer peripheral surface of the magnet rotor and the magnetic sensing center of the hall sensor is preferably arranged such that r of the radial hall sensor is larger than r of the circumferential hall sensor. Here, the “magnetic pole outer peripheral surface” refers to the outer peripheral surface of the magnet portion.
ホールセンサの感磁中心と、前記磁石回転子の厚み中心点を通りかつ回転軸に垂直な平面との距離hについて、
前記径方向用ホールセンサのhが前記周方向用ホールセンサのhより大きくなるように配置されていることが好ましい。
好ましくは周方向用ホールセンサのhはゼロとする。周方向用ホールセンサはhが高くなるほど感磁面で受ける磁束量が減るのでセンサ出力が小さくなる。径方向用ホールセンサと周方向用ホールセンサの感度が同じ場合、周方向用ホールセンサの出力を落として径方向用ホールセンサの出力と振幅を同じにする。したがって、周方向用ホールセンサをz軸方向にずらすほど、系全体の感度は下がり、回転角度検出装置の出力も小さくなる。
About the distance h between the magnetosensitive center of the Hall sensor and the plane passing through the thickness center point of the magnet rotor and perpendicular to the rotation axis,
It is preferable that h of the radial hall sensor is arranged to be larger than h of the circumferential hall sensor.
Preferably, h in the circumferential hall sensor is zero. In the circumferential hall sensor, the higher the h, the smaller the amount of magnetic flux received on the magnetosensitive surface, so the sensor output becomes smaller. When the sensitivity of the hall sensor for radial direction and the hall sensor for circumferential direction is the same, the output of the hall sensor for circumferential direction is lowered to make the output and the amplitude of the hall sensor for radial direction the same. Therefore, as the circumferential hall sensor is shifted in the z-axis direction, the sensitivity of the entire system decreases and the output of the rotation angle detection device also decreases.
前記磁石回転子の回転軸に対するホールセンサの感磁面の傾きχ(ただし、χは0〜90deg.の範囲内である。)について、前記径方向用ホールセンサのχ≠0となるように配置されていることが好ましい。 The inclination χ of the magnetosensitive surface of the Hall sensor with respect to the rotation axis of the magnet rotor (where χ is in the range of 0 to 90 deg.) Is arranged so that χ ≠ 0 of the radial Hall sensor. It is preferable that
本発明の他の回転角度検出装置は、N極対の磁極を有する磁石回転子(但し、Nは2以上の整数である。)と、前記磁石回転子から印加される磁束に応じて磁石回転子の回転角度を検出するための4個のホールセンサとを備え、
前記4個のホールセンサは、感磁軸を前記磁石回転子の径方向に向けて配置した第1及び第2の径方向用ホールセンサと、感磁軸を前記磁石回転子の周方向に向けて配置した第1及び第2の周方向用ホールセンサとで構成されることを特徴とする。
Another rotation angle detection device according to the present invention includes a magnet rotor having N pole pairs of magnetic poles (where N is an integer of 2 or more), and magnet rotation according to the magnetic flux applied from the magnet rotor. And four Hall sensors for detecting the rotation angle of the child,
The four Hall sensors have first and second radial Hall sensors arranged with the magnetic sensitive axes directed in the radial direction of the magnet rotor, and the magnetic sensitive axes directed in the circumferential direction of the magnet rotor. The first and second circumferential hall sensors are arranged in the manner described above.
本発明の他の回転角度検出装置は、N極対の磁極を有する磁石回転子(但し、Nは2以上の整数である。)と、前記磁石回転子から印加される磁束に応じて磁石回転子の回転角度を検出するための4個のホールセンサとを備え、
前記4個のホールセンサは、感磁軸を前記磁石回転子の径方向に向けて配置した第1及び第2の径方向用ホールセンサと、感磁軸を前記磁石回転子の周方向に向けて配置した第1及び第2の周方向用ホールセンサとで構成され、
前記第1の径方向用ホールセンサ及び前記第2の周方向用ホールセンサは、磁石回転子の周方向で(2s1−1)×360/(4N)deg.の角度(但し、s1は0を含む自然数である。)を為すように設けられ、
前記第2の径方向用ホールセンサ及び前記第1の周方向用ホールセンサは、磁石回転子の周方向で(2s2−1)×360/(4N)deg.の角度(但し、s2は0を含む自然数である。)を為すように設けられ、
前記第1の径方向用ホールセンサ及び前記第2の周方向用ホールセンサの出力を合成し、前記第2の径方向用ホールセンサ及び前記第1の周方向用ホールセンサの出力を合成することにより、回転角度を検出することを特徴とする。
Another rotation angle detection device according to the present invention includes a magnet rotor having N pole pairs of magnetic poles (where N is an integer of 2 or more), and magnet rotation according to the magnetic flux applied from the magnet rotor. And four Hall sensors for detecting the rotation angle of the child,
The four Hall sensors have first and second radial Hall sensors arranged with the magnetic sensitive axes directed in the radial direction of the magnet rotor, and the magnetic sensitive axes directed in the circumferential direction of the magnet rotor. And the first and second circumferential hall sensors arranged
The first radial hall sensor and the second circumferential hall sensor are (2s 1 −1) × 360 / (4N) deg. In the circumferential direction of the magnet rotor. (Where s 1 is a natural number including 0),
The second radial hall sensor and the first circumferential hall sensor are (2s 2 −1) × 360 / (4N) deg. In the circumferential direction of the magnet rotor. (Where s 2 is a natural number including 0),
Synthesizing outputs of the first radial hall sensor and the second circumferential hall sensor, and synthesizing outputs of the second radial hall sensor and the first circumferential hall sensor; Thus, the rotation angle is detected.
さらに、前記第1及び第2の径方向用ホールセンサは磁石回転子の周方向で(2s3−1)×360/(4N)deg.の角度(但し、s3は0を含む自然数である。)を為すように設けられていることが好ましい。 Further, the first and second radial hall sensors are (2s 3 −1) × 360 / (4N) deg. It is preferable that s 3 is provided so as to make an angle of (note that s 3 is a natural number including 0).
前記第1の径方向用ホールセンサが受ける磁束密度成分の振幅と前記第2の周方向用ホールセンサが受ける磁束密度成分の振幅とが同じになるように、前記第1の径方向用ホールセンサ及び前記第2の周方向用ホールセンサを配置し、
前記第2の径方向用ホールセンサが受ける磁束密度成分の振幅と前記第1の周方向用ホールセンサが受ける磁束密度成分の振幅とが同じになるように、前記第2の径方向用ホールセンサ及び前記第1の周方向用ホールセンサを配置することが好ましい。
The first radial hall sensor so that the amplitude of the magnetic flux density component received by the first radial hall sensor is the same as the amplitude of the magnetic flux density component received by the second circumferential hall sensor. And arranging the second circumferential hall sensor,
The second radial hall sensor so that the amplitude of the magnetic flux density component received by the second radial hall sensor is the same as the amplitude of the magnetic flux density component received by the first circumferential hall sensor. It is preferable to arrange the first circumferential hall sensor.
磁石回転子の磁極外周面とホールセンサの感磁中心との距離rについて、
前記第1の径方向用ホールセンサのrが前記第2の周方向用ホールセンサのrより大きくなるように配置され、
前記第2の径方向用ホールセンサのrが前記第1の周方向用ホールセンサのrより大きくなるように配置されていることが好ましい。
About the distance r between the magnetic pole outer peripheral surface of the magnet rotor and the magnetic sensing center of the Hall sensor,
The first radial hall sensor is arranged so that r thereof is larger than r of the second circumferential hall sensor,
It is preferable that the second radial hall sensor is arranged such that r of the second radial hall sensor is larger than r of the first circumferential hall sensor.
ホールセンサの感磁中心と、前記磁石回転子の厚み中心点を通りかつ回転軸に垂直な平面との距離hについて、
前記第1の径方向用ホールセンサのhが前記第2の周方向用ホールセンサのhより大きくなるように配置され、
前記第2の径方向用ホールセンサのhが前記第1の周方向用ホールセンサのhより大きくなるように配置されていることが好ましい。
About the distance h between the magnetosensitive center of the Hall sensor and the plane passing through the thickness center point of the magnet rotor and perpendicular to the rotation axis,
The first radial hall sensor h is arranged to be larger than the second circumferential hall sensor h,
It is preferable that h of the second radial hall sensor is arranged to be larger than h of the first circumferential hall sensor.
前記磁石回転子の回転軸に対するホールセンサの感磁面の傾きχ(ただし、χは0〜90deg.の範囲内である。)について、
前記第1の径方向用ホールセンサのχ≠0となるように配置され、
前記第2の径方向用ホールセンサのχ≠0となるように配置されていることが好ましい。
About the inclination χ (where χ is in the range of 0 to 90 deg.) Of the magnetosensitive surface of the Hall sensor with respect to the rotation axis of the magnet rotor.
The first radial hall sensor is arranged so that χ ≠ 0,
It is preferable that the second radial hall sensor is arranged so that
前記磁石回転子の磁極外周面とホールセンサの感磁中心との距離rについて、前記第1の径方向用ホールセンサのrが前記第2の径方向用ホールセンサのrと等しく、前記第1の周方向用ホールセンサのrが前記第2の周方向用ホールセンサのrと等しいことが望ましい。 Regarding the distance r between the magnetic pole outer peripheral surface of the magnet rotor and the magnetic sensing center of the hall sensor, r of the first radial hall sensor is equal to r of the second radial hall sensor, and the first It is desirable that r of the circumferential hall sensor is equal to r of the second circumferential hall sensor.
前記ホールセンサの感磁中心と、前記磁石回転子の厚み中心点を通りかつ回転軸に垂直な平面との距離hについて、前記第1の径方向用ホールセンサのhが前記第2の径方向用ホールセンサのhと等しく、前記第1の周方向用ホールセンサのhが前記第2の周方向用ホールセンサのhと等しいことが望ましい。 With respect to the distance h between the magnetic sensing center of the Hall sensor and the plane passing through the thickness center point of the magnet rotor and perpendicular to the rotation axis, h of the first radial hall sensor is the second radial direction. It is desirable that h of the first circumferential hall sensor is equal to h of the second circumferential hall sensor.
前記磁石回転子の回転軸に対するホールセンサの感磁面の傾きχ(ただし、χは0〜90deg.の範囲内である。)について、前記第1の径方向用ホールセンサのχが前記第2の径方向用ホールセンサのχと等しく、前記第1の周方向用ホールセンサのχが前記第2の周方向用ホールセンサのχと等しいことが望ましい。 With respect to the inclination χ of the magnetosensitive surface of the Hall sensor with respect to the rotation axis of the magnet rotor (where χ is in the range of 0 to 90 deg.), The χ of the first radial Hall sensor is the second. It is desirable that χ of the radial hall sensor is equal to χ, and χ of the first circumferential hall sensor is equal to χ of the second circumferential hall sensor.
周方向磁束密度は、径方向磁束密度に比べ小さいので、周方向用ホールセンサを磁石に近づけることが望ましく、さらには、磁力線に直交させることが望ましい。逆に、径方向磁束密度は周方向磁束密度に比べて大きい為、径方向用ホールセンサの配置には自由度があり、距離を離す、あるいは磁力線に直交させず傾けることで径方向用ホールセンサの感じる磁束密度を等しくして、等しい出力電圧を得られるよう配置できる。調整範囲を狭くでき、調整が容易になるというメリットもある。 Since the circumferential magnetic flux density is smaller than the radial magnetic flux density, it is desirable that the circumferential hall sensor be close to the magnet, and more preferably perpendicular to the magnetic field lines. Conversely, since the radial magnetic flux density is larger than the circumferential magnetic flux density, there is a degree of freedom in the arrangement of the radial hall sensors, and the radial hall sensors can be tilted away from each other or tilted without being perpendicular to the magnetic field lines. Can be arranged so that the same magnetic flux density can be obtained and the same output voltage can be obtained. There is also an advantage that the adjustment range can be narrowed and adjustment becomes easy.
本発明では、ホールセンサの配置の自由度が増える。一つの半径方向において、内側に周方向磁束用、外側に径方向磁束用とを配置できる。周方向用を回転磁石の回転面上に置き、径方向用を周方向用センサから軸方向に移動させることができる。 In this invention, the freedom degree of arrangement | positioning of a Hall sensor increases. In one radial direction, a circumferential magnetic flux can be arranged on the inner side and a radial magnetic flux can be arranged on the outer side. The circumferential direction can be placed on the rotating surface of the rotary magnet, and the radial direction can be moved in the axial direction from the circumferential direction sensor.
4個のホールセンサを用いた本発明では、センサの数が多いにもかかわらず、周方向の2箇所のみにセンサ部(2つのホールセンサのペア)が設置されるため、取り付けが容易である。それぞれ周方向用と径方向用のホールセンサの感磁面が直交していれば、取り付け誤差があっても、位相差90deg.がほぼ保たれるので、演算後に回転角度検出装置における角度誤差が増加することは回避される。 In the present invention using four hall sensors, although the number of sensors is large, the sensor section (a pair of two hall sensors) is installed only in two places in the circumferential direction, so that attachment is easy. . If the magnetic sensing surfaces of the circumferential and radial Hall sensors are orthogonal to each other, the phase difference of 90 deg. Is substantially maintained, it is avoided that the angle error in the rotation angle detector increases after the calculation.
本発明の回転機は、上述の回転角度検出装置を備えることを特徴とする。 A rotating machine according to the present invention includes the above-described rotation angle detection device.
ここで、回転角度に応じた回転角度信号を出力するとは、逆正接演算を含む処理を行うことである。具体的には逆正接演算をデジタルで行う処理である。 Here, outputting the rotation angle signal corresponding to the rotation angle means performing processing including arctangent calculation. Specifically, it is a process of performing an arctangent calculation digitally.
本発明によれば、回転角度の検出精度が高い回転角度検出装置および回転機を提供することができる。 ADVANTAGE OF THE INVENTION According to this invention, the rotation angle detection apparatus and rotary machine with a high rotation angle detection accuracy can be provided.
以下、本発明の実施の形態について図面を参照しつつ説明する。なお、これら実施形態により本発明が必ずしも限定されるものではない。 Embodiments of the present invention will be described below with reference to the drawings. In addition, this invention is not necessarily limited by these embodiment.
(実施形態1)
12極に着磁されたリング磁石11の外周に、第1のホールIC12aと第2のホールIC12bを配置した回転角度検出装置を図1(a)に模式的に示す。同図(a)は正面図、(b)は断面図であり、部品同士の位置関係のみを略記して示す。第1のホールIC12aは、第2のホールIC12bに対して周方向の位相が同じ位置であり、且つ径方向で12aよりもrが大きい位置に配置している。第2のホールIC12bの感磁軸B01はリング磁石の周方向に沿っており、第1のホールIC12aの感磁軸A01はリング磁石の径方向に沿って配置している。そして、リング磁石が回転すると、第1のホールIC12aが受ける磁束密度成分の振幅が、第2のホールIC12bが受ける磁束密度成分の振幅と同じとなるように、各々を配置している。各ホールICの出力は、(c)の回路図に示すように、Va信号及びVb信号としてA−D変換器27に入力し、AD変換された信号は角度演算器28を経ることで、磁石回転子の回転角度を示す検出角度を得る。なお、各ホールICを駆動する駆動電圧やGND端子等の表示は省略する。磁石回転子のリング磁石11の中心を原点とし、回転軸をZ軸とした円柱座標系で表わす。リング磁石の直径は2r0、厚さはt(厚さは回転軸方向における寸法)、Z軸からホールIC12bの中心(感磁中心)までの距離はr0+r1、Z軸からホールIC12aの中心(感磁中心)までの距離はr0+r2とする。この構成を用いると、検出角度の誤差は機械角で±1deg.を得た。
(Embodiment 1)
FIG. 1A schematically shows a rotation angle detection device in which a
(実施形態2)
図2は、図1において第1のホールIC12aの位置をリング磁石11の周方向に電気角で360×3deg.(機械角で180deg.)位相をずらして移動させた実施形態を示す。図2(a)は正面図、(b)は断面図である。第1のホールIC12aは図1の場合と等価に作動する。A−D変換器等の表示は省略する。ただし、リング磁石を挟むように各ホールICを配置しており、磁石回転子のシャフトが回転時に軸ズレを起こしたとしても、一方のホールICがリング磁石から僅かに離隔するズレの影響と、他方のホールICがリング磁石に僅かに接近するズレの影響とが、角度演算器で相殺され、図1の構成に比べて、シャフトの軸ズレが生じても、それに起因する回転角度検出装置の角度誤差を抑制することができる。シャフトの軸ズレが発生していない状態では、この構成を用いると、検出角度の誤差は機械角で±1deg.を得た。
(Embodiment 2)
2 shows that the position of the
(参考形態1)
参考形態の回転角度検出装置におけるホールICの配置の概略を図3の正面図に示す。磁石回転子のリング磁石11の周方向(リング磁石11の回転方向)に沿って2個のホールIC41,44を配置する。ホールIC41は感磁軸(磁束を検出する方向)をリング磁石11の中心に向け、他方のホールIC44は感磁軸をリング磁石11の周方向に向ける。ホールIC同士の間隔は電気角で90+180deg.とする。リング磁石表面とホールICの感磁中心間の距離rは、r/λ=1/12を満たす。ホールIC41及び44の出力をAD変換器に入力し、得られた変換出力を角度演算器に入力し、その出力として回転角度検出器の検出角度を得る。検出角度の誤差は機械角で±4deg.を得た。
(Reference form 1)
An outline of the arrangement of the Hall ICs in the rotation angle detection device of the reference form is shown in the front view of FIG. Two
(作用)
回転方向に2N極を持つ磁石回転子について説明する。この磁石回転子はN極対の磁石を持っていると言い換えてもよく、N回の軸対称性を有している。ある基準角の機械角φは電気角θによって[数1]で表される。
(Function)
A magnet rotor having 2N poles in the rotation direction will be described. This magnet rotor may be rephrased as having N pole pairs of magnets, and has N times of axial symmetry. A mechanical angle φ of a certain reference angle is expressed by [Equation 1] by an electrical angle θ.

この磁石回転子から出てくる磁束密度を単純化の為に軸方向に無限に長い磁石回転子であると仮定すると(すなわち、軸方向には磁束密度は一様に分布していると仮定する)、磁石回転子から発生する空間の磁束密度をベクトルとして考え、半径方向の磁束密度成分Brと回転方向の磁束密度成分Bθとは、円筒座標系であらわされた測定位置(r,φ)の関数として次の[数2]の関数で近似可能である。 Assuming that the magnetic flux density coming out of this magnet rotor is a magnet rotor that is infinitely long in the axial direction for simplification (that is, it is assumed that the magnetic flux density is uniformly distributed in the axial direction) ), The magnetic flux density in the space generated from the magnet rotor is considered as a vector, and the magnetic flux density component Br in the radial direction and the magnetic flux density component Bθ in the rotational direction are represented by the measurement position (r, φ) expressed in the cylindrical coordinate system. The function can be approximated by the following [Equation 2] function.
さらに、基本波成分がゼロでない、すなわち、A1がゼロではない場合、rがある程度大きくなり、三次以上の高調波がA1で表されるところの基本波に比して小さい時には[数3]のように簡略化可能である。 Further, when the fundamental wave component is not zero, that is, when A 1 is not zero, r becomes large to some extent, and when the third-order or higher harmonic is smaller than the fundamental wave represented by A 1 [Equation 3 ] Can be simplified.
これは、測定点に対して磁石回転子が角度θだけ動くと磁束の向きがθ変化することを意味する。すなわち、磁束密度の大きさに関係なく、磁束の方向を検知することにより磁石回転子の回転角度が測定可能である事を意味している。なお、上記で無限に長いとし上式ではsin信号とcos信号の振幅の大きさを同一のA1としたが、一般に軸が有限長の場合等には、cosの項とsinの項に掛かる係数の大きさが異なる場合もある。この、係数の大きさが異なる場合、条件によって振幅をそろえる振幅調整が必要となる。 This means that the direction of the magnetic flux changes by θ when the magnet rotor moves by an angle θ with respect to the measurement point. That is, the rotation angle of the magnet rotor can be measured by detecting the direction of the magnetic flux regardless of the magnitude of the magnetic flux density. While in the above formula and infinitely long above were the same of A 1 the magnitude of the amplitude of the sin signal and the cos signal, generally when the shaft is a finite length and the like, applied to the term of the term and the sin of cos The magnitude of the coefficient may be different. When the magnitudes of the coefficients are different, it is necessary to adjust the amplitude according to the conditions.
さて、上記のように同時にsinとcosの信号を得るためには同じホールセンサを用いた場合、ホールセンサ配置に90deg.の位相差が必要となる。この位相差を得るためには、多くの組み合わせが可能である。すなわち、ホールセンサは一方向に異方性(すなわち、感磁軸)を持っているために、回転子の中心から法線方向に引いた線に対するホールセンサ自体のなす角度ξを任意に取る事が可能であるが、角度ξは、0deg.、±90deg、±180deg.のいずれかであることが好ましい。このξを自転角と称する。 When the same Hall sensor is used to obtain sin and cos signals at the same time as described above, 90 deg. The phase difference is required. Many combinations are possible to obtain this phase difference. In other words, since the Hall sensor has anisotropy in one direction (that is, a magnetosensitive axis), an angle ξ formed by the Hall sensor itself with respect to a line drawn in the normal direction from the center of the rotor is arbitrarily set. Is possible, but the angle ξ is 0 deg. , ± 90 deg, ± 180 deg. It is preferable that it is either. This ξ is called a rotation angle.
ホールセンサの位置を固定する場合、第1のホールセンサを電気角で0(ゼロ)deg.の位置に、第2のホールセンサを電気角でθの位置に配置したとする。このθを公転角と仮に称する。公転角θ=90deg.の所に第2のホールセンサを配置した場合には、第1のホールセンサと第2のホールセンサの自転角ξを同一角度にする事によりsinθとcosθの関係を持つ信号を得ることが可能となる。また、第1のホールセンサを基準にした場合、すなわち、第1のホールセンサの公転角が0deg.とし、自転角が0deg.とした場合、第2のホールセンサを公転角θ=45deg.とし、自転角ξ=−45deg.とする事でも同様な信号を得ることが可能であるし、公転角θ=180deg.とし、自転角ξ=90deg.とすることでも同様な信号を得ることが可能である。 When fixing the position of the hall sensor, the first hall sensor is set to 0 (zero) deg. It is assumed that the second hall sensor is disposed at the position θ in terms of electrical angle at the position. This θ is temporarily called a revolution angle. Revolution angle θ = 90 deg. When the second hall sensor is disposed at the position, it is possible to obtain a signal having a relationship between sin θ and cos θ by setting the rotation angle ξ of the first hall sensor and the second hall sensor to the same angle. It becomes. Further, when the first Hall sensor is used as a reference, that is, the revolution angle of the first Hall sensor is 0 deg. And the rotation angle is 0 deg. In this case, the second hall sensor has a revolution angle θ = 45 deg. And the rotation angle ξ = −45 deg. It is possible to obtain a similar signal, and the revolution angle θ = 180 deg. And the rotation angle ξ = 90 deg. It is also possible to obtain a similar signal.
さらには、2つのホールセンサの公転角θ=0deg.とし、第1のホールセンサの自転角ξ=0deg.とし,第2のセンサ素子の自転角ξ=90deg.として同一個所に2つのホールセンサを設けても同様な信号を得ることが可能となる。これらを、さらに拡張して考える場合、第1のホールセンサと第2のホールセンサとの公転角差をΔθ、第1のホールセンサと第2のホールセンサとの自転角差をΔξとした場合に、[数4]の関係となるΔθとΔξの組み合わせであれば良い。 Further, the revolution angle θ of the two Hall sensors is 0 deg. And the rotation angle ξ = 0 deg. Of the first Hall sensor. And the rotation angle of the second sensor element ξ = 90 deg. It is possible to obtain a similar signal even if two hall sensors are provided at the same location. When these are further expanded, the revolution angle difference between the first Hall sensor and the second Hall sensor is Δθ, and the rotation angle difference between the first Hall sensor and the second Hall sensor is Δξ. In addition, any combination of [Delta] [theta] and [Delta] [xi] having the relationship of [Equation 4] may be used.
さらに、磁石回転子が多磁極対からなっているため、電気角で第2のホールセンサは上記の角度に止まらず一周期を単位とした角度を移動した場所(電気角で360deg.×nに対応する場所であり、整数nはプラスマイナスいずれでもよい。)に設置されても同様な信号を得ることが可能である。すなわち、[数5]の関係となるθとξの組み合わせであれば良い(ただし、nは任意の整数)。これが最も一般化された式になる。 Further, since the magnet rotor is composed of a multi-pole pair, the second Hall sensor does not stop at the above-mentioned angle in terms of electrical angle but has moved an angle in units of one cycle (electric angle is set to 360 deg. × n). It is possible to obtain a similar signal even if it is installed at a corresponding location, and the integer n may be plus or minus. In other words, any combination of θ and ξ that satisfies the relationship of [Equation 5] may be used (where n is an arbitrary integer). This is the most generalized formula.
(適合する磁気センサ)
以上の磁気センサを実現するための磁気センサとして、ホール素子を有するホールセンサがある。ホール素子は磁束密度の「大きさ」を検知してその出力電圧値が変化するセンサ素子であり、通常は、センサ素子の面に対して垂直に加わる磁束密度成分を一次元的に検知するように使用されている(この向きが感磁軸に相当する。)。ホールセンサの平坦な面(感磁部分:モールドされた面で最も広い面に相当する。)は、磁束密度の変化を検知するセンサ素子の面(感磁面)に平行であり、感磁軸とは直交する。感磁面の中心を感磁中心と称する。さらに詳しくは、ホールセンサの出力は、ホールセンサの感磁部分における磁束密度の感磁軸方向成分に比例する。本発明においては、ホールセンサを回転磁界中に入れた場合の電圧変化に着目してセンサシステム全体を構成している。回転磁界に対してcosα(αは基準方向に対して磁束がなす角度)の電圧変化をするホールセンサ、符号が逆の(−cosα)の電圧変化をするホールセンサ、あるいはそれらを組み合わせた素子対を用いる。直流電圧印加時に、cosαに比例する電圧を出力するホールセンサを適用することにより、[数6]として、下記Voutが出力される。数6でδは出力電圧の印加磁束密度Binに対する変化率である。
(Applicable magnetic sensor)
As a magnetic sensor for realizing the above magnetic sensor, there is a Hall sensor having a Hall element. The Hall element is a sensor element that changes its output voltage value by detecting the “magnitude” of the magnetic flux density, and normally detects the magnetic flux density component applied perpendicularly to the surface of the sensor element in a one-dimensional manner. (This direction corresponds to the magnetosensitive axis.) The flat surface of the Hall sensor (the magnetic sensitive portion: corresponding to the widest surface of the molded surface) is parallel to the surface of the sensor element (magnetic sensitive surface) that detects the change in magnetic flux density, and the magnetic sensitive axis. Is orthogonal. The center of the magnetic sensitive surface is referred to as the magnetic sensitive center. More specifically, the output of the Hall sensor is proportional to the magnetically sensitive axial direction component of the magnetic flux density in the magnetically sensitive portion of the Hall sensor. In the present invention, the entire sensor system is configured by paying attention to the voltage change when the Hall sensor is placed in the rotating magnetic field. Hall sensor that changes the voltage of cos α (α is the angle formed by the magnetic flux with respect to the reference direction) relative to the rotating magnetic field, Hall sensor that changes the voltage of the opposite sign (−cos α), or a combination of elements Is used. By applying a Hall sensor that outputs a voltage proportional to cos α when a DC voltage is applied, the following Vout is output as [Equation 6]. In Equation 6, δ is the rate of change of the output voltage with respect to the applied magnetic flux density Bin.
一般的に、ホール素子を有するホールセンサはその感磁軸を磁石回転子の方に向けて設置し、複数個の配置を行う場合には電気角で所定の位置に置き(上記の公転角θ)、上記の自転角ξを変化させることない。ホールセンサでは必ず空間的に異なる位置にのみ設置されなければならないため、ホールセンサを磁気センサとして利用した場合には、その設置場所にも制約を受けるが、本発明においてはこのξを変えることも含まれており、同一機械角の位置に配置した場合でも異なる位相差を持つことが可能になる。 In general, a Hall sensor having a Hall element is placed with its magnetosensitive axis directed toward the magnet rotor, and when a plurality of arrangements are made, it is placed at a predetermined position with an electrical angle (the revolution angle θ described above). ), Without changing the rotation angle ξ. Since the hall sensor must be installed only at spatially different positions, when the hall sensor is used as a magnetic sensor, its location is also limited, but in the present invention, this ξ can be changed. Even if they are arranged at the same mechanical angle, they can have different phase differences.
(複数の磁気センサによる高調波成分の削減)
以上の作用説明では、理想的に磁石回転子を回転させた場合に時間、空間的にsinあるいはcosの高調波のない磁束が発生していると仮定しているが、実際には数2において、高調波成分(高調波歪)A3,A5,・・・はゼロと限らない。むしろ、高調波成分は存在すると仮定するほうが一般的である。簡単に表せば数式7のように表される。
(Reduction of harmonic components by multiple magnetic sensors)
In the above description of the operation, it is assumed that when a magnet rotor is ideally rotated, a magnetic flux without sin or cos harmonics is generated temporally and spatially. , Harmonic components (harmonic distortion) A 3 , A 5 ,... Are not limited to zero. Rather, it is more common to assume that harmonic components are present. If expressed simply, it is expressed as Equation 7.
すなわち、歪の成分となる高調波成分はBr,Bθそれぞれの基本波に対して含まれる割合が等しく、それぞれcos成分,sin成分が主である。この高調波成分を減少させるために、複数の磁気センサを配置して、高調波成分のみを大幅に低減する方法を発明した。 That is, the ratio of the harmonic components that are distortion components is equal to each of the fundamental waves of Br and Bθ, and the cos component and the sin component are mainly used, respectively. In order to reduce this harmonic component, a method of arranging a plurality of magnetic sensors and greatly reducing only the harmonic component was invented.
(磁気センサを2個から4個にすると角度誤差が小さくなる理由)
磁気センサが4個の場合、回転子から出てくる磁束を検出した時にr方向(半径方向)成分が台形波形になりやすく、θ方向(回転方向)成分が三角波になりやすく、比較すると、それぞれの高調波は逆位相の関係になる。第1のホールセンサは磁束密度のr方向成分、第2のホールセンサは磁束密度のθ方向成分を検出するように電気角(公転角)で90deg.離れた位置に自転角−90deg.で配置する。その際に、それぞれのホールセンサから出力される基本波の位相は一致させる事が可能であり、その場合にそれぞれのホールセンサから出力される主たる高調波とは逆位相の関係になる。具体的に、第1のホールセンサをθ=0deg.ξ=0deg.とし、第2のホールセンサをθ=90deg.ξ=0deg.とし、第3のホールセンサをθ=180deg.ξ=90deg.とし、第4のホールセンサをθ=270deg.ξ=−90deg.とした場合、各ホールセンサからの出力をVout1〜Vout4と表す。
(Reason why the angle error is reduced by changing the number of magnetic sensors from 2 to 4)
When there are four magnetic sensors, the r direction (radial direction) component tends to be a trapezoidal waveform and the θ direction (rotation direction) component tends to be a triangular wave when the magnetic flux coming out of the rotor is detected. The harmonics of have an antiphase relationship. The first Hall sensor has an electrical angle (revolution angle) of 90 deg. So that the r direction component of the magnetic flux density is detected, and the second Hall sensor detects the θ direction component of the magnetic flux density. Rotation angle -90 deg. Place with. At that time, the phases of the fundamental waves output from the respective hall sensors can be made to coincide with each other, and in this case, the main harmonics output from the respective hall sensors have an opposite phase relationship. Specifically, the first hall sensor is set to θ = 0 deg. ξ = 0 deg. And the second Hall sensor is θ = 90 deg. ξ = 0 deg. And the third Hall sensor is θ = 180 deg. ξ = 90 deg. And the fourth Hall sensor is θ = 270 deg. ξ = −90 deg. In this case, the outputs from the hall sensors are expressed as Vout 1 to Vout 4 .
この関係を利用して、位置関係を合わせることで2つのホールセンサからの基本波同士を足し合わせ、同時に主たる3次高調波成分は逆位相となるように足し合わせて低減し、振幅が等しく、かつ90deg.位相の異なる2信号を得ることができ、その結果角度誤差を少なくすることが可能になる。ここで、各出力の正負の符号は、ホールセンサの面の表裏に対応するので、数式が成立する様に適宜配置できる。 By using this relationship, by combining the positional relationship, the fundamental waves from the two Hall sensors are added together, and at the same time, the main third-order harmonic components are added and reduced so as to be in antiphase, and the amplitudes are equal, And 90 deg. Two signals having different phases can be obtained, and as a result, the angle error can be reduced. Here, since the positive and negative signs of each output correspond to the front and back of the surface of the Hall sensor, they can be appropriately arranged so that the mathematical formula is established.
数8では、一般には1ではない係数Kmのために出力振幅は異なるが、このように2つのホールセンサの出力を合成することにより、必ず等しい振幅を得ることができる。第1及び第2のホールセンサ、第3及び第4のホールセンサがそれぞれ磁石回転子に対し、例えば磁石回転子中心から等しい距離、周方向で等しい角度差(=電気的に90deg.異なる。)となるように配置すれば、条件を満足する。ホールセンサの配置が容易になる。
In
数8での基本波に対する3次高調波の割合はA3/A1であるのに対し、
数9でのそれは、(Km−1)/(Km+1)×A3/A1 となる。したがって、ホールセンサを2個から4個に増やすことにより、逆正接演算から得られる回転角度の誤差の最も大きな原因である3次高調波を(Km−1)/(Km+1)に減少させることができる。
While the ratio of the third harmonic to the fundamental wave in
That in Equation 9 is (Km−1) / (Km + 1) × A 3 / A 1 . Therefore, by increasing the number of Hall sensors from two to four, the third harmonic, which is the largest cause of the rotation angle error obtained from the arc tangent calculation, can be reduced to (Km−1) / (Km + 1). it can.
参考形態1の構成(図3)でホールICをもう1組追加して検討したところ、Kmはおよそ1.4から2であった。すなわち、点線表示したように、ホールIC41の左隣で電気角90de.g離れた位置にホールIC42を設け、ホールIC44の右隣で電気角−90deg.離れた位置にホールIC43を設ける。先の1組の出力と追加した1組の出力をオペアンプで加算・平均し、A−D変換器と角度演算器を用いて検出角度を得る。したがって、ホールセンサを2個から4個に増やすことにより、波形歪すなわち角度誤差を、ホールセンサ2個の場合の3割から1割程度までに低減できた。さらに4個のホールセンサからの出力振幅を調整すれば、特に後述の図12や図13の構成を採用してKm=1にすれば、3次高調波歪みを完全に打ち消すことができ、角度誤差をさらに抑制できる。波形歪による角度誤差の原因は、3次歪から、さらに小さな値である5次歪に移る。
When another set of Hall ICs was added in the configuration of Reference Mode 1 (FIG. 3), Km was about 1.4 to 2. That is, as indicated by the dotted line, an electrical angle of 90 de.
発明者らは出力振幅を調整する手法として、磁石を周回する軌道上で、rが小さい位置に周方向用ホールセンサを配置し、rが大きいに径方向用ホールセンサを配置する回転角度検出装置を発明した。一方のホールセンサが受ける実効的な磁束密度に対して他方のホールセンサが受ける実効的な磁束密度を下げることにより、双方のホールセンサに係る出力信号の振幅をそろえることができる。また周方向用ホールセンサを磁石回転子の回転面上に配置し、径方向用ホールセンサを周方向用ホールセンサよりも軸方向に離れた位置に移動させることが可能であり、磁石回転子に対するホールセンサの配置の自由度が多いことがわかる。配置により調整できるため、調整用の回路を付加せずに済む。 As a method of adjusting the output amplitude, the inventors have arranged a circumferential hall sensor at a position where r is small and a radial hall sensor where r is large on a track orbiting the magnet. Was invented. By reducing the effective magnetic flux density received by the other Hall sensor relative to the effective magnetic flux density received by one Hall sensor, the amplitudes of the output signals relating to both Hall sensors can be made uniform. In addition, the circumferential hall sensor can be arranged on the rotating surface of the magnet rotor, and the radial hall sensor can be moved to a position separated in the axial direction from the circumferential hall sensor. It can be seen that the degree of freedom of arrangement of the hall sensors is large. Since adjustment is possible by arrangement, it is not necessary to add an adjustment circuit.
図4は、実施形態3(図12)と上述の実施形態2(図2)の構成について、磁石の回転角と機械角誤差の関係を測定して得たグラフである。太線が4センサの実施形態3に相当し、細線が2センサの実施形態2に相当する。実施形態2の構成では、検出角度の誤差は機械角で±1deg.を得た。実施形態3の構成では、検出角度の誤差は機械角で±0.4deg.を得た。
FIG. 4 is a graph obtained by measuring the relationship between the rotation angle of the magnet and the mechanical angle error for the configurations of the third embodiment (FIG. 12) and the second embodiment (FIG. 2). The thick line corresponds to Embodiment 3 with 4 sensors, and the thin line corresponds to
従来技術のように、ホールセンサを回転軸に対して同一方向を向けた場合には、すべてのホールセンサが径方向の磁束密度成分を検知するため、ホールセンサを2個から4個に増やしても、上述の効果は現れない。一方、回転軸に対して、ほぼ軸対称に4個のホールセンサを配置した場合には、回転軸の偏芯(変動)に対して、回転角度の誤差の増大が抑えられるという特徴がある。本発明では、ホールセンサを完全に軸対称配置にすることができないために、完全には抑制できないが、同相出力を得るホールセンサの一方を他方の軸対称の位置に最も近い場所に設置することにより(N=8の場合)、遜色なく、10分の1程度に抑えられることを確認した。 When the hall sensors are oriented in the same direction with respect to the rotation axis as in the prior art, all hall sensors detect the magnetic flux density component in the radial direction, so the number of hall sensors is increased from two to four. However, the above effect does not appear. On the other hand, when four Hall sensors are arranged almost symmetrically with respect to the rotation axis, there is a feature that an increase in rotation angle error can be suppressed with respect to eccentricity (variation) of the rotation axis. In the present invention, the Hall sensor cannot be completely axisymmetrically arranged, and thus cannot be completely suppressed. However, one of the Hall sensors that obtains the in-phase output is installed at a location closest to the other axially symmetric position. (In the case of N = 8), it was confirmed that it can be suppressed to about 1/10 without inferiority.
磁石回転子が、例えば12極の場合は、ホールIC12aに対してホールIC12bは周方向に機械角φ異なる位置に配置されているため(φ=15deg.)、電気角θの位相差がある(θ=90deg.)。一方が磁石回転子の周方向に沿った磁束を受けているときに、他方はθ遅れた磁束を受けている。このように多極化することでθに対するφが小さくなり、一組のホールICを狭い領域に収めて小型化することができた。
When the magnet rotor is, for example, 12 poles, the
(極数による回転角度誤差減少)
最大検出角度誤差を機械角で表すと、電気角誤差が磁極数の数に応じて減少していく。このため、磁極数の多い磁石回転子を用いる本発明は、分解能が高くなり、より検出誤差を少なくすることが可能になる。12極の磁石回転子では、2極の磁石回転子を用いた場合に比べ、6分の1の機械角で表した回転角度誤差に減少する。多極(4極以上)のリング磁石を用いる場合、リングの内周にヨークを組み込むと、ヨーク無しの場合に比べて、ホールセンサに印加する磁束密度を大きくすることができ、回転角度検出装置の出力向上に寄与する。
磁石回転子の極対数をモータの極対数と同じにする場合、高精度のモータ制御が容易になる。また、磁石回転子に代えてモータの磁石を利用して回転角度を求めることもできる。軽量化と小型化に寄与する。
多極磁石(4極以上)は、2極磁石よりも外に漏れる磁束が少ないので、外部に対する磁気的影響も小さい。
磁石回転子の機械的回転周期よりもホールセンサの受ける磁束の回転周期が1/N倍(Nは2以上の整数)となり、分解能が高くなる。上述の回転角検出装置は回転機に設けるとよい。
(Reduction of rotation angle error due to the number of poles)
When the maximum detection angle error is represented by a mechanical angle, the electrical angle error decreases according to the number of magnetic poles. For this reason, the present invention using a magnet rotor with a large number of magnetic poles has high resolution and can further reduce detection errors. In the case of a 12-pole magnet rotor, the rotational angle error is reduced to one-sixth of the mechanical angle compared to the case of using a 2-pole magnet rotor. When using a multi-pole (4 poles or more) ring magnet and incorporating a yoke on the inner periphery of the ring, the magnetic flux density applied to the Hall sensor can be increased compared to the case without a yoke, and the rotation angle detection device Contributes to improved output.
When the number of pole pairs of the magnet rotor is the same as the number of pole pairs of the motor, high-precision motor control is facilitated. Moreover, it can replace with a magnet rotor and a rotation angle can also be calculated | required using the magnet of a motor. Contributes to weight reduction and miniaturization.
Since the multipole magnet (4 poles or more) has less magnetic flux leaking outside than the dipole magnet, the magnetic influence on the outside is small.
The rotation period of the magnetic flux received by the Hall sensor is 1 / N times (N is an integer of 2 or more), and the resolution is higher than the mechanical rotation period of the magnet rotor. The above rotation angle detection device may be provided in a rotating machine.
図5は、図1に係る回転角度検出装置をより詳細に説明する図面であって、(a)は正面図、(b)は側面図(下半分は一部断面図)である。図5(a)の回転角度検出装置は、磁石回転子1と、磁気センサ部2と、前記磁気センサ部を固定したハウジング3で構成されており、ホールIC12a,12b(ホール素子とオペアンプを一体化したホールセンサ)によってリング磁石1aの回転角度を検出する。図5のホールICは、磁力線が向かってくる向き(磁石回転子の中心からみて半径方向に相当)に対して、ホールICの感磁軸を平行にして配置するものと、ホールICの感磁軸を垂直にして配置するものとがある。この磁束との関係は、磁石が回転すると変化する。図5(b)に示すように、ホールICの端子を回路用基板2cに突き立てて固定する。さらにホールIC12a,12bの信号をA−D変換器に入力し、得られる出力を両方とも角度演算器に入力し、最終的な出力として検出角度の値を得る。磁石回転子を多極とし磁気センサ配置を近接させることにより、回転角度を検出する。ホールICの数や配置(すなわち、磁気センサ部)を除いた部分は、本発明の他の実施形態でも同様のものを用いる。
5A and 5B are diagrams for explaining the rotation angle detection device according to FIG. 1 in more detail, in which FIG. 5A is a front view, and FIG. 5B is a side view (a lower half is a partial cross-sectional view). The rotation angle detection device shown in FIG. 5A includes a
磁石回転子1は、複数の円弧を連結した外周形状を有するリング状永久磁石1aと、前記リング状永久磁石の内周側に一体に形成された軟磁性リング1bと、前記軟磁性リングを支持する非磁性リング状のアダプタ1cを備える。磁気センサ部2は、磁石回転子1に対向する周縁が凹面である板状の回路用基板2cと、前記回路用基板2cの面に固定した一対のホールIC12a,12bと、前記ホールIC及び回路用基板2cに対して制御用回路又は出力の処理回路を電気的に接続するケーブル2d及びコネクタ2eと、前記ホールICを覆う非磁性カバー2fとを有する。ハウジング3には、ホールIC12a,12bが所定の間隔をもって磁石回転子1と対向するよう、前記回路用基板2cを固定するためのコ字型アングル3aおよびボルト3cが設けられている。
The
図5の回転角度検出装置を使用するため、磁気センサ部2を設置したハウジング3を(ボルト止め用孔3bを用いて)工作機械本体に固定し、工作機械の回転シャフトに磁石回転子1を(ボルト止め用孔1dを用いて)同軸となるように固定する(図5では工作機械の図示を省略する。)。図5(a)に示すように、磁石回転子1と磁気センサ部2を対向させた状態で工作機械の回転シャフトを駆動させると、実施形態1の回転角度検出装置を適用した構成として、高い精度で回転角度を検出することができる。
In order to use the rotation angle detection device of FIG. 5, the housing 3 in which the
ここで、磁石回転子1は、NdFeB系磁粉とバインダーを成形してなるリング状永久磁石1aと、軟鉄粉とバインダーを成形してなる軟磁性リング1bと、前記軟磁性リングを回転シャフトに取り付けるためのS45C製のアダプタ1cで構成する。ホールIC12a,12bは磁石回転子1の回転中心からみて15deg.の角度(機械角:φ)を為すよう、回路用基板2cに固定する。ハウジング3及びコ字型アングル3aも非磁性SUS316で構成する。
磁石回転子1の外接円(点線で図示)の半径:40mm
磁石回転子1の外接円(点線で図示)とホールIC12bの感磁中心の距離r1:3.5mm
磁石回転子1の外接円(点線で図示)とホールIC12aの感磁中心の距離r2:5.5mm
磁石回転子1の厚さt:25mm
ハウジング3の厚さT:2mm (2mm厚の板材を打ち抜き、絞りで形成する。)
なお、距離rを変えてみたところ、r=10mmの場合でも問題なく使用することができた。また、磁石回転子1の厚さtを5mmの場合でも同様に問題なく使用することができた。
Here, the
Radius of circumscribed circle (illustrated by dotted line) of magnet rotor 1: 40 mm
The distance r 1 between the circumscribed circle of the magnet rotor 1 (illustrated by a dotted line) and the magnetic sensing center of the
The distance r 2 between the circumscribed circle of the magnet rotor 1 (illustrated by a dotted line) and the magnetic sensing center of the
Thickness T of housing 3: 2 mm (A 2 mm thick plate is punched out and formed with a diaphragm)
When the distance r was changed, it could be used without any problem even when r = 10 mm. Further, even when the thickness t of the
(実施形態3)
図6は、図2において第1のホールIC12aの感磁中心とリング磁石11間の距離をr1に縮小すると共に、前記感磁中心をリング磁石11の軸方向(Z軸方向)に距離h平行移動させた実施形態を示す。図6(a)は正面図、(b)は断面図である。この距離hは、リング磁石が回転すると、第1のホールIC12aが受ける磁束密度成分の振幅が、第2のホールIC12bが受ける磁束密度成分の振幅と同じとなる寸法である。
(Embodiment 3)
6 reduces the distance between the magnetic sensing center of the
(実施形態4)
図7は、図2において第1のホールIC12aの感磁中心とリング磁石11間の距離をr1に縮小すると共に、ホールIC12aの感磁面ををリング磁石11の軸方向に対して角度χ傾斜させた実施形態を示す。図7(a)は正面図、(b)は断面図である。このセンサ傾斜角χは、リング磁石が回転すると、第1のホールIC12aが受ける磁束密度成分の振幅が、第2のホールIC12bが受ける磁束密度成分の振幅と同じとなる角度に相当する。
(Embodiment 4)
7 reduces the distance between the magnetic sensing center of the
(実施形態5〜10)
図8は、図1において第1のホールIC12aと第2ホールIC12bの位置や磁石回転子を変更した複数の実施形態を示す。図8(a)〜(f)の各々は実施形態毎の断面図である。いずれも、第1のホールIC12aが受ける磁束密度成分の振幅が、第2のホールIC12bが受ける磁束密度成分の振幅と同じとなるように配置している。(a)、(b)(d)、(e)はリング磁石11を円板磁石21に置換えている。(c)、(f)はリング磁石11は変更していない。
(Embodiments 5 to 10)
FIG. 8 shows a plurality of embodiments in which the positions of the
(実施形態11〜13)
図9は、図1において第1のホールIC12aと第2ホールIC12bの位置や磁石回転子を変更した複数の実施形態を示す。図9(g)〜(i)の各々は実施形態毎の断面図である。いずれも、第1のホールIC12aが受ける磁束密度成分の振幅が、第2のホールIC12bが受ける磁束密度成分の振幅と同じとなるように配置している。(a)、(b)(d)、(e)はリング磁石11を円板磁石21に置換えている。
(
FIG. 9 shows a plurality of embodiments in which the positions of the
(実施形態14)
図10は、図1において第1及び第2ホールICをもう1組追加し、その追加位置は電気角で360×3+90deg.位相を変えた位置とした実施形態を示す。図10(a)は正面図、(b)は断面図、(c)は各々の組のホールICのセンサ出力と回転角度の関係を示すグラフである。追加される第1及び第2のホールIC13a,13bは、感磁軸A02及びB02が直交している。この構成を用いると、検出角度の誤差は電気角で±0.6deg.を得た。さらに微調整を進めると、(c)の各波形の振幅は同一となり、角度誤差はほとんどなくなる。
(Embodiment 14)
10 adds another set of the first and second Hall ICs in FIG. 1, and the addition position is 360 × 3 + 90 deg. An embodiment in which the phase is changed is shown. 10A is a front view, FIG. 10B is a cross-sectional view, and FIG. 10C is a graph showing the relationship between the sensor output and the rotation angle of each set of Hall ICs. The first and
(実施形態15)
図11は、図10において各ホールICの周方向配置を変更した実施形態を示す。(a)の正面図に示すように、ホールIC12a及びホールIC13aを時計回りに電気角360degだけ位相のずれた位置に移している。ただし、ホールIC12a及びホールIC13aの感磁中心は、リング磁石に近づけている分、それぞれをZ軸方向に平行移動されている。この調整により、リング磁石が回転すると、第1のホールIC12aが受ける磁束密度成分の振幅が第2のホールIC12bが受ける磁束密度成分の振幅と同じとなるように、各々を配置している。
(Embodiment 15)
FIG. 11 shows an embodiment in which the circumferential arrangement of the Hall ICs in FIG. 10 is changed. As shown in the front view of (a), the
(実施形態16)
図12は、図6において第1及び第2ホールICをもう1組追加し、その追加位置は時計回りに電気角で360+90deg.位相を変えた位置とした実施形態を示す。
(Embodiment 16)
FIG. 12 shows another addition of the first and second Hall ICs in FIG. 6, and the added position is 360 + 90 deg. An embodiment in which the phase is changed is shown.
(実施形態17)
図13は、図7において第1及び第2ホールICをもう1組追加し、その追加位置は時計回りに電気角で360+90deg.位相を変えた位置とした実施形態を示す。
(Embodiment 17)
FIG. 13 shows another addition of the first and second Hall ICs in FIG. 7 and the addition position is 360 + 90 deg. An embodiment in which the phase is changed is shown.
(参考形態2)
図14は、図1においてホールICの位置や角度ξを変えた参考形態を示す。図14(a)では、ホールIC12の位置や角度ξは変更せずホールIC120aとしているが、ホールIC12bを移動してホールIC120bとした。その結果、リング磁石の回転中心及びホールIC120aの感磁中心を結ぶ線と、リング磁石の回転中心及びホールIC120bの感磁中心を結ぶ線とは、角度Δθを為している。感磁軸A01及びB01は直交しているが、このΔθの分だけホールICの出力の位相がズレるので、回転角度検出装置の検出角度に角度誤差が加わり、検出精度を高くすることは難しい。
(Reference form 2)
FIG. 14 shows a reference form in which the position and angle ξ of the Hall IC in FIG. 1 are changed. In FIG. 14A, the position and the angle ξ of the
図14の(b)は、同図(a)のホールIC120bで角度ξのずれを補正すべく傾けると共に、感磁軸A01及びB01の直交関係を維持するものである。したがって、同図(a)と同様に回転角度検出装置の検出角度に角度誤差が加わり、検出精度を高くすることは難しい。図14の(c)は、同図(b)でホールIC120aのξを修正し感磁軸をリング磁石の回転中心に向けたものである。しかし、2つのホールICの間にΔθの位相ズレがあることには変わりなく、Δθは90degの整数倍ではないので、角度誤差の問題は残ります。 FIG. 14B shows that the Hall IC 120b shown in FIG. 14A is tilted to correct the deviation of the angle ξ and maintains the orthogonal relationship between the magnetic sensitive axes A01 and B01. Therefore, as in FIG. 5A, an angle error is added to the detection angle of the rotation angle detection device, and it is difficult to increase the detection accuracy. (C) of FIG. 14 is obtained by correcting the ξ of the Hall IC 120a in FIG. 14 (b) and directing the magnetosensitive axis toward the rotation center of the ring magnet. However, there is no change in the phase difference of Δθ between the two Hall ICs, and since Δθ is not an integer multiple of 90 deg, the problem of angular error remains.
(表面磁束密度分布)
本発明における磁石回転子(4極以上)の磁束とホールセンサの位置関係を図15に示す。同図(a)は正面図であり(b)は断面図である。図15(a)において、磁石回転子のリング磁石11aの各磁極内の磁化の向きは直線状の太矢印で表し、磁極表面から発生する磁束を曲線状の太矢印で表した。ホールIC12はX軸の向きの磁束を受けている。λは表面磁束密度分布を測定したときのサイン信号の1波長(電気角で360deg.)に相当し、リング磁石11aでは1対の磁極表面の周方向長さに相当する。r1は、リング磁石11aの径方向に沿ってみたときの、ホールIC12の感磁面の中心(感磁中心)とリング磁石11aの表面(外周面)との距離である。このとき、ホールIC12はX軸の向きの磁束を受けている。リング磁石11aを周方向に電気角でη=90deg.だけ回転させると、ホールIC12はY軸の向きの磁束を受けるようになる(感磁軸に直交する磁束密度成分なので出力はない。)。Z軸は、リング磁石11aの孔の中心oを通り磁石の回転平面と直交する軸で、磁石回転子の回転軸に相当する。θmは、磁石回転子の機械的な回転を表す機械角である。磁石回転子の回転中心oと点pを結ぶ点線op上にあり、且つ磁石回転子1aの表面から距離rの位置に中心を配置したホールIC12を基準にした場合、ホールIC12rは、ホールIC12に対して周方向に電気角でη異なる位置にあると言える。ηを公転角と称する。ホールIC12rの中心と磁石回転子の回転中心oを結ぶ点線と、ホールIC12rの感磁軸とが為す角度ξについては、自転角と称する。径方向用ホールセンサはξ=0deg.である。周方向用ホールセンサはξ=90deg.である。θmは、磁石回転子の機械的な回転を表す機械角である。
(Surface magnetic flux density distribution)
FIG. 15 shows the positional relationship between the magnetic flux of the magnet rotor (four or more poles) and the Hall sensor in the present invention. FIG. 2A is a front view, and FIG. In FIG. 15A, the direction of magnetization in each magnetic pole of the
図15の(b)は3通りのホールIC12、及びホールIC12’の配置を示した。ホールIC12は、Z=0のX−Y平面上に感磁面の中心を配置し、感磁面をX−Y平面に対してχ傾けた。ホールIC12’は、センサ配置角φ'の位置にあり、X−Y平面に対してχ'傾けた。ホールIC12’の中心は、リング磁石11aの厚み中心点を通りかつ回転軸線に垂直な平面からZ軸方向にh’離れている。ホールIC12’の位置において、磁束の方向はX軸からε'傾いている。ホールIC12’’は、その中心が磁石回転子のリング磁石の回転軸線上にあり(φ''=90deg.)、感磁面がX−Y平面に平行(χ''=180deg.かつε''=180deg.)である。リング磁石の厚みtはZ軸方向の寸法である。磁石の厚み中心点は、磁石のX−Y断面中央とZ軸断面の中央が交差する点であり、XYZ軸の原点に相当する。このリング磁石の孔には回転軸となるシャフトを固定することができる。
FIG. 15B shows the arrangement of three
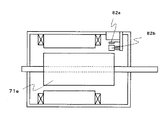
図16は本発明の回転機を説明する概略図である。ホールIC82bは、ホールIC82aの面(ホールICの感磁軸に垂直な面である。)を磁石回転子71cの周方向(θ方向)に沿った向き((a)のホールICの面(その感磁軸に垂直な面)とは直交する向き)に変更し、周方向にずらした位置にもう1つ配置したものと等価である。
FIG. 16 is a schematic view for explaining the rotating machine of the present invention. The
図16に示すように、この回転機はモータであり、フレーム73c内には、中心軸としてシャフト71bを有する永久磁石のロータ71aと、フレーム73cの内周面に固定したステータ用コイル73b付きステータ73aを設置したものである。シャフト71bはベアリング(図示省略)を介してフレーム73cに回転自在に固定した。さらに、磁石回転子71cをシャフト71bに設け、支持部72nを介してホールIC82aをフレーム73cに設置する。なお、この回転機には、ホールIC82aと同じ径方向用ホールIC82c(図示せず)と、ホールIC82bと同じ周方向用ホールIC82d(図示せず)も備える。
As shown in FIG. 16, this rotating machine is a motor. In a
前記磁石回転子71cの回転磁界を前記ホールIC82a及びホールIC82b検知し、それらの出力を演算回路72mに入力し、前記2つの出力を逆正接演算し、磁石回転子71cの回転角度を得た。前記磁化方向の磁気的な回転の軸を、図中に鎖線で示す。
The rotating magnetic field of the magnet rotor 71c was detected by the
実施形態1の構成をモータに適用した場合、感磁軸が磁石回転子の径方向を向いているホールICは、図16のホールIC82aのように磁石回転子と対向して配置する。実施形態1の構成で、感磁軸が磁石回転子の周方向を向いているホールICは、図16のホールIC82bのように前記ホールICとは90°異なる向きとなるように配置する。
When the configuration of the first embodiment is applied to a motor, the Hall IC whose magnetosensitive axis faces the radial direction of the magnet rotor is arranged to face the magnet rotor as in the
図17は本発明の他の回転機を説明する概略図であり、図16の構成を変形した応用例である。図17は、ロータ71a及び磁石回転子71cを、ロータ71eに置換したものであり、ホールIC82aとホールIC82bで磁石回転子71eの回転磁界を検知し、演算回路で処理し、磁石回転子の回転角度を検出する。
FIG. 17 is a schematic diagram for explaining another rotating machine of the present invention, which is an application example in which the configuration of FIG. 16 is modified. In FIG. 17, the
1:磁石回転子、1a:リング状永久磁石、1b:軟磁性リング、1c:アダプタ、
1d:ボルト止め用孔、
2:磁気センサ部、
2c:回路用基板、2d:ケーブル、2e:コネクタ、2f:非磁性カバー、
3:ハウジング、3a:コ字型アングル、3b:ボルト止め用孔、3c:ボルト、
11:リング磁石、11a:リング磁石、
12,12’,12’’:ホールIC、
12a,12b、12r:ホールIC、
13a,13b:ホールIC、
21:多極磁石、
27:AD変換部、28:角度演算部、
41,42,43,44:ホールIC、
71a:ロータ、71b:シャフト、71c:磁石回転子、71e:ロータ、
72m:演算回路、72n:支持部、
73a:ステータ、73b:ステータ用コイル、73c:フレーム、
82a:ホールIC、82b:ホールIC、
120a、120b:ホールIC
1: magnet rotor, 1a: ring-shaped permanent magnet, 1b: soft magnetic ring, 1c: adapter,
1d: Bolt fixing hole,
2: Magnetic sensor part,
2c: circuit board, 2d: cable, 2e: connector, 2f: non-magnetic cover,
3: Housing, 3a: U-shaped angle, 3b: Bolt fixing hole, 3c: Bolt,
11: Ring magnet, 11a: Ring magnet,
12, 12 ′, 12 ″: Hall IC,
12a, 12b, 12r: Hall IC,
13a, 13b: Hall IC,
21: Multipolar magnet,
27: AD converter, 28: Angle calculator,
41, 42, 43, 44: Hall IC,
71a: rotor, 71b: shaft, 71c: magnet rotor, 71e: rotor,
72m: arithmetic circuit, 72n: support part,
73a: Stator, 73b: Coil for stator, 73c: Frame,
82a: Hall IC, 82b: Hall IC,
120a, 120b: Hall IC
Claims (16)
前記2個のホールセンサは、感磁軸を前記磁石回転子の径方向に向けて配置した径方向用ホールセンサと、感磁軸を前記磁石回転子の周方向に向けて配置した周方向用ホールセンサとで構成され、
前記径方向用ホールセンサが受ける磁束密度成分の振幅と前記周方向用ホールセンサが受ける磁束密度成分の振幅とが同じになるように、前記径方向用ホールセンサ及び前記周方向用ホールセンサが配置されていることを特徴とする回転角度検出装置。 A magnet rotor having N pole pairs of magnetic poles (where N is an integer of 2 or more) and two for detecting the rotation angle of the magnet rotor according to the magnetic flux applied from the magnet rotor With a hall sensor
The two Hall sensors are a radial Hall sensor in which a magnetic sensitive axis is arranged in the radial direction of the magnet rotor, and a circumferential direction in which a magnetic sensitive axis is arranged in the circumferential direction of the magnet rotor. It consists of a hall sensor and
The radial hall sensor and the circumferential hall sensor are arranged so that the amplitude of the magnetic flux density component received by the radial hall sensor and the amplitude of the magnetic flux density component received by the circumferential hall sensor are the same. A rotation angle detection device characterized by being provided.
前記2個のホールセンサは、感磁軸を前記磁石回転子の径方向に向けて配置した径方向用ホールセンサと、感磁軸を前記磁石回転子の周方向に向けて配置した周方向用ホールセンサとで構成され、
前記径方向用ホールセンサ及び前記周方向用ホールセンサは、磁石回転子の周方向で(2s1−1)×360/(4N)deg.の角度(但し、s1は0を含む自然数である。)を為すように設けられ、
前記径方向用ホールセンサが受ける磁束密度成分の振幅と前記周方向用ホールセンサが受ける磁束密度成分の振幅とが同じになるように、前記径方向用ホールセンサ及び前記周方向用ホールセンサが配置されており、
前記径方向用ホールセンサ及び前記周方向用ホールセンサの出力を合成することにより、回転角度を検出することを特徴とする回転角度検出装置。 A magnet rotor having N pole pairs of magnetic poles (where N is an integer of 2 or more) and two for detecting the rotation angle of the magnet rotor according to the magnetic flux applied from the magnet rotor With a hall sensor
The two Hall sensors are a radial Hall sensor in which a magnetic sensitive axis is arranged in the radial direction of the magnet rotor, and a circumferential direction in which a magnetic sensitive axis is arranged in the circumferential direction of the magnet rotor. It consists of a hall sensor and
The radial hall sensor and the circumferential hall sensor are (2s 1 −1) × 360 / (4N) deg. (Where s 1 is a natural number including 0),
The radial hall sensor and the circumferential hall sensor are arranged so that the amplitude of the magnetic flux density component received by the radial hall sensor and the amplitude of the magnetic flux density component received by the circumferential hall sensor are the same. Has been
A rotation angle detecting device that detects a rotation angle by combining outputs of the radial hall sensor and the circumferential hall sensor.
前記径方向用ホールセンサのhが前記周方向用ホールセンサのhより大きくなるように配置されていることを特徴とする回転角度検出装置。 In claim 1 or 2, for the distance h between the magnetic sensing center of the Hall sensor and a plane that passes through the thickness center point of the magnet rotor and is perpendicular to the rotation axis,
The rotation angle detecting device, wherein the radial hall sensor is arranged so that h of the radial hall sensor is larger than h of the circumferential hall sensor.
前記4個のホールセンサは、感磁軸を前記磁石回転子の径方向に向けて配置した第1及び第2の径方向用ホールセンサと、感磁軸を前記磁石回転子の周方向に向けて配置した第1及び第2の周方向用ホールセンサとで構成されることを特徴とする回転角度検出装置。 A magnet rotor having N pole pairs of magnetic poles (where N is an integer of 2 or more) and four for detecting the rotation angle of the magnet rotor in accordance with the magnetic flux applied from the magnet rotor With a hall sensor
The four Hall sensors have first and second radial Hall sensors arranged with the magnetic sensitive axes directed in the radial direction of the magnet rotor, and the magnetic sensitive axes directed in the circumferential direction of the magnet rotor. A rotation angle detection device comprising: a first circumferential hall sensor and a second circumferential hall sensor arranged in the same manner.
前記4個のホールセンサは、感磁軸を前記磁石回転子の径方向に向けて配置した第1及び第2の径方向用ホールセンサと、感磁軸を前記磁石回転子の周方向に向けて配置した第1及び第2の周方向用ホールセンサとで構成され、
前記第1の径方向用ホールセンサ及び前記第2の周方向用ホールセンサは、磁石回転子の周方向で(2s1−1)×360/(4N)deg.の角度(但し、s1は0を含む自然数である。)を為すように設けられ、
前記第2の径方向用ホールセンサ及び前記第1の周方向用ホールセンサは、磁石回転子の周方向で(2s2−1)×360/(4N)deg.の角度(但し、s2は0を含む自然数である。)を為すように設けられ、
前記第1の径方向用ホールセンサ及び前記第2の周方向用ホールセンサの出力を合成し、前記第2の径方向用ホールセンサ及び前記第1の周方向用ホールセンサの出力を合成することにより、回転角度を検出することを特徴とする回転角度検出装置。 A magnet rotor having N pole pairs of magnetic poles (where N is an integer of 2 or more) and four for detecting the rotation angle of the magnet rotor in accordance with the magnetic flux applied from the magnet rotor With a hall sensor
The four Hall sensors have first and second radial Hall sensors arranged with the magnetic sensitive axes directed in the radial direction of the magnet rotor, and the magnetic sensitive axes directed in the circumferential direction of the magnet rotor. And the first and second circumferential hall sensors arranged
The first radial hall sensor and the second circumferential hall sensor are (2s 1 −1) × 360 / (4N) deg. In the circumferential direction of the magnet rotor. (Where s 1 is a natural number including 0),
The second radial hall sensor and the first circumferential hall sensor are (2s 2 −1) × 360 / (4N) deg. In the circumferential direction of the magnet rotor. (Where s 2 is a natural number including 0),
Synthesizing outputs of the first radial hall sensor and the second circumferential hall sensor, and synthesizing outputs of the second radial hall sensor and the first circumferential hall sensor; A rotation angle detecting device characterized by detecting a rotation angle.
前記第2の径方向用ホールセンサが受ける磁束密度成分の振幅と前記第1の周方向用ホールセンサが受ける磁束密度成分の振幅とが同じになるように、前記第2の径方向用ホールセンサ及び前記第1の周方向用ホールセンサを配置することを特徴とする回転角度検出装置。 9. The magnetic flux density component received by the first radial hall sensor and the amplitude of the magnetic flux density component received by the second circumferential hall sensor according to any one of claims 6 to 8. , Arranging the first radial hall sensor and the second circumferential hall sensor,
The second radial hall sensor so that the amplitude of the magnetic flux density component received by the second radial hall sensor is the same as the amplitude of the magnetic flux density component received by the first circumferential hall sensor. And a rotation angle detection device comprising the first circumferential hall sensor.
前記第1の径方向用ホールセンサのrが前記第2の周方向用ホールセンサのrより大きくなるように配置され、
前記第2の径方向用ホールセンサのrが前記第1の周方向用ホールセンサのrより大きくなるように配置されていることを特徴とする回転角度検出装置。 In any one of Claims 6 thru | or 8, About the distance r of the magnetic pole outer peripheral surface of a magnet rotor, and the magnetic sensing center of a Hall sensor,
The first radial hall sensor is arranged so that r thereof is larger than r of the second circumferential hall sensor,
The rotation angle detecting device, wherein the second radial hall sensor is arranged such that r of the second radial hall sensor is larger than r of the first circumferential hall sensor.
前記第1の径方向用ホールセンサのhが前記第2の周方向用ホールセンサのhより大きくなるように配置され、
前記第2の径方向用ホールセンサのhが前記第1の周方向用ホールセンサのhより大きくなるように配置されていることを特徴とする回転角度検出装置。 The distance h between the magnetosensitive center of the Hall sensor and a plane passing through the thickness center point of the magnet rotor and perpendicular to the rotation axis according to any one of claims 6 to 8.
The first radial hall sensor h is arranged to be larger than the second circumferential hall sensor h,
The rotation angle detecting device, wherein the second radial hall sensor is arranged such that h of the second radial hall sensor is larger than h of the first circumferential hall sensor.
前記第1の径方向用ホールセンサのχが≠0となるように配置され、
前記第2の径方向用ホールセンサのχが≠0となるように配置されていることを特徴とする回転角度検出装置。 9. The inclination χ (where χ is in the range of 0 to 90 deg.) Of the magnetosensitive surface of the Hall sensor with respect to the rotation axis of the magnet rotor according to claim 6.
The first radial Hall sensor χ is arranged so that ≠ 0,
The rotation angle detecting device, wherein the second radial hall sensor is arranged such that χ is not equal to zero.
前記第1の径方向用ホールセンサのrが前記第2の径方向用ホールセンサのrと等しく、
前記第1の周方向用ホールセンサのrが前記第2の周方向用ホールセンサのrと等しいことを特徴とする回転角度検出装置。 The distance r between the magnetic pole outer peripheral surface of the magnet rotor and the magnetic sensitive center of the Hall sensor according to any one of claims 6 to 12.
R of the first radial hall sensor is equal to r of the second radial hall sensor;
The rotation angle detector according to claim 1, wherein r of the first circumferential hall sensor is equal to r of the second circumferential hall sensor.
前記第1の径方向用ホールセンサのhが前記第2の径方向用ホールセンサのhと等しく、
前記第1の周方向用ホールセンサのhが前記第2の周方向用ホールセンサのhと等しいことを特徴とする回転角度検出装置。 The distance h between the magnetosensitive center of the Hall sensor and a plane passing through the thickness center point of the magnet rotor and perpendicular to the rotation axis according to any one of claims 6 to 12.
H of the first radial hall sensor is equal to h of the second radial hall sensor;
The rotation angle detecting device according to claim 1, wherein h of the first circumferential hall sensor is equal to h of the second circumferential hall sensor.
前記第1の径方向用ホールセンサのχが前記第2の径方向用ホールセンサのχと等しく、
前記第1の周方向用ホールセンサのχが前記第2の周方向用ホールセンサのχと等しいことを特徴とする回転角度検出装置。 13. The inclination χ (where χ is in the range of 0 to 90 deg.) Of the magnetically sensitive surface of the Hall sensor with respect to the rotation axis of the magnet rotor according to claim 6.
Χ of the first radial hall sensor is equal to χ of the second radial hall sensor,
The rotation angle detector according to claim 1, wherein χ of the first circumferential hall sensor is equal to χ of the second circumferential hall sensor.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008129107A JP4900837B2 (en) | 2008-05-16 | 2008-05-16 | Rotation angle detector and rotating machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008129107A JP4900837B2 (en) | 2008-05-16 | 2008-05-16 | Rotation angle detector and rotating machine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009276261A true JP2009276261A (en) | 2009-11-26 |
| JP4900837B2 JP4900837B2 (en) | 2012-03-21 |
Family
ID=41441822
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008129107A Expired - Fee Related JP4900837B2 (en) | 2008-05-16 | 2008-05-16 | Rotation angle detector and rotating machine |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4900837B2 (en) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010008359A (en) * | 2008-06-30 | 2010-01-14 | Furukawa Electric Co Ltd:The | Rotating angle detecting apparatus |
| JP2010286401A (en) * | 2009-06-12 | 2010-12-24 | Asahi Kasei Electronics Co Ltd | Position detector |
| JP2011141132A (en) * | 2010-01-05 | 2011-07-21 | Hitachi Automotive Systems Ltd | Position sensor |
| JP2012154721A (en) * | 2011-01-25 | 2012-08-16 | Toshiba Corp | Angle detector |
| WO2014109190A1 (en) * | 2013-01-10 | 2014-07-17 | 村田機械株式会社 | Displacement sensor and displacement detection method |
| JP2014528085A (en) * | 2011-09-29 | 2014-10-23 | タイコ エレクトロニクス アンプ ゲゼルシャフト ミット ベシュレンクテル ハウツンク | Method for non-contact measurement of relative position with Hall sensors |
| CN110998244A (en) * | 2018-05-11 | 2020-04-10 | 株式会社三共制作所 | Angle detector |
| JP2020085516A (en) * | 2018-11-19 | 2020-06-04 | 三菱電機株式会社 | Rotation angle detector, dynamo-electric machine, automobile drive system, and method for manufacturing rotation angle detector |
| JP2020153806A (en) * | 2019-03-20 | 2020-09-24 | Tdk株式会社 | Rotation angle detector |
| CN114295105A (en) * | 2021-12-30 | 2022-04-08 | 赤峰华源新力科技有限公司 | Novel measure wind power tower cylinder inclination device |
| CN114384296A (en) * | 2020-10-21 | 2022-04-22 | 三菱电机株式会社 | Current detection device |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006242939A (en) * | 2005-02-03 | 2006-09-14 | Denso Corp | Rotation angle detector |
| WO2007057563A1 (en) * | 2005-11-15 | 2007-05-24 | Moving Magnet Technologies | Magnetic angular position sensor for a course up to 360° |
| JP2007271443A (en) * | 2006-03-31 | 2007-10-18 | Aisin Seiki Co Ltd | Device for detecting angle |
| JP2008151774A (en) * | 2006-11-21 | 2008-07-03 | Hitachi Metals Ltd | Rotation angle detector and rotating machine |
-
2008
- 2008-05-16 JP JP2008129107A patent/JP4900837B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006242939A (en) * | 2005-02-03 | 2006-09-14 | Denso Corp | Rotation angle detector |
| WO2007057563A1 (en) * | 2005-11-15 | 2007-05-24 | Moving Magnet Technologies | Magnetic angular position sensor for a course up to 360° |
| JP2007271443A (en) * | 2006-03-31 | 2007-10-18 | Aisin Seiki Co Ltd | Device for detecting angle |
| JP2008151774A (en) * | 2006-11-21 | 2008-07-03 | Hitachi Metals Ltd | Rotation angle detector and rotating machine |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010008359A (en) * | 2008-06-30 | 2010-01-14 | Furukawa Electric Co Ltd:The | Rotating angle detecting apparatus |
| JP2010286401A (en) * | 2009-06-12 | 2010-12-24 | Asahi Kasei Electronics Co Ltd | Position detector |
| JP2011141132A (en) * | 2010-01-05 | 2011-07-21 | Hitachi Automotive Systems Ltd | Position sensor |
| US8933690B2 (en) | 2011-01-25 | 2015-01-13 | Kabushiki Kaisha Toshiba | Angle detection apparatus |
| JP2012154721A (en) * | 2011-01-25 | 2012-08-16 | Toshiba Corp | Angle detector |
| JP2014528085A (en) * | 2011-09-29 | 2014-10-23 | タイコ エレクトロニクス アンプ ゲゼルシャフト ミット ベシュレンクテル ハウツンク | Method for non-contact measurement of relative position with Hall sensors |
| TWI611163B (en) * | 2013-01-10 | 2018-01-11 | Murata Machinery Ltd | Displacement sensor and displacement detection method |
| US9772198B2 (en) | 2013-01-10 | 2017-09-26 | Murata Machinery, Ltd. | Displacement sensor and displacement detection method |
| WO2014109190A1 (en) * | 2013-01-10 | 2014-07-17 | 村田機械株式会社 | Displacement sensor and displacement detection method |
| CN110998244A (en) * | 2018-05-11 | 2020-04-10 | 株式会社三共制作所 | Angle detector |
| CN110998244B (en) * | 2018-05-11 | 2022-06-17 | 株式会社三共制作所 | Angle detector |
| JP2020085516A (en) * | 2018-11-19 | 2020-06-04 | 三菱電機株式会社 | Rotation angle detector, dynamo-electric machine, automobile drive system, and method for manufacturing rotation angle detector |
| JP2020153806A (en) * | 2019-03-20 | 2020-09-24 | Tdk株式会社 | Rotation angle detector |
| CN114384296A (en) * | 2020-10-21 | 2022-04-22 | 三菱电机株式会社 | Current detection device |
| CN114295105A (en) * | 2021-12-30 | 2022-04-08 | 赤峰华源新力科技有限公司 | Novel measure wind power tower cylinder inclination device |
| CN114295105B (en) * | 2021-12-30 | 2024-05-28 | 赤峰华源新力科技有限公司 | Novel measure wind-powered electricity generation tower section of thick bamboo inclination device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4900837B2 (en) | 2012-03-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4900837B2 (en) | Rotation angle detector and rotating machine | |
| JP4858855B2 (en) | Rotation angle detector and rotating machine | |
| JP5120384B2 (en) | Rotation angle detection device, rotator, and rotation angle detection method | |
| US11592318B2 (en) | Arrangement, method and sensor for measuring an absolute angular position using a multi-pole magnet | |
| JP4324813B2 (en) | Rotation angle detector and rotating machine | |
| JP5258884B2 (en) | Magnetic encoder and actuator | |
| JP4836058B2 (en) | Magnetic encoder device | |
| JP5818104B2 (en) | Rotation angle detector | |
| JP2009080058A (en) | Rotation detector and bearing with rotation detector | |
| KR20080077369A (en) | Magnetic angular position sensor for a course up to 360° | |
| WO2017090146A1 (en) | Angle detection device and electric power steering device | |
| JPWO2007055135A1 (en) | Magnetic encoder device | |
| JP2014236531A (en) | Motor | |
| JP2012194086A (en) | Three-phase brushless motor | |
| JP2012112897A (en) | Rotation angle position detector and sensor-equipped ball bearing using the same | |
| JP6791013B2 (en) | Two-axis integrated motor | |
| JP2013250073A (en) | Rotational angle detection device | |
| JP2006208049A (en) | Rotation angle detection apparatus | |
| JP2003315092A (en) | Rotation angle sensor and torque sensor | |
| JP2005017056A (en) | Magnetic encoder device | |
| JP2005172441A (en) | Angle and angular velocity integrated detector | |
| JP2021135116A (en) | Angle detection device and control device for rotary electric machine | |
| JP2006138738A (en) | Magnetic type encoder device | |
| JP2005030959A (en) | Magnetic encoder device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100913 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110719 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110805 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111003 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111209 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111222 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4900837 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150113 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |