JP2007233192A - Actuator - Google Patents
Actuator Download PDFInfo
- Publication number
- JP2007233192A JP2007233192A JP2006056809A JP2006056809A JP2007233192A JP 2007233192 A JP2007233192 A JP 2007233192A JP 2006056809 A JP2006056809 A JP 2006056809A JP 2006056809 A JP2006056809 A JP 2006056809A JP 2007233192 A JP2007233192 A JP 2007233192A
- Authority
- JP
- Japan
- Prior art keywords
- mass
- unit
- light
- behavior
- actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Landscapes
- Photo Coupler, Interrupter, Optical-To-Optical Conversion Devices (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Mechanical Light Control Or Optical Switches (AREA)
- Optical Integrated Circuits (AREA)
Abstract
Description
本発明は、アクチュエータに関するものである。 The present invention relates to an actuator.
レーザープリンタ等にて光走査により描画を行うための光スキャナとして、捩り振動子で構成されたアクチュエータを用いたものが知られている(例えば、特許文献1参照。)。
例えば、特許文献1にかかるアクチュエータ(光スキャナ)は、1自由度振動系の捩り振動子で構成されている。すなわち、かかるアクチュエータは、質量部を捩りバネを介して支持部に対し回動可能に支持して構成されている。
As an optical scanner for performing drawing by optical scanning with a laser printer or the like, an optical scanner using an actuator composed of a torsional vibrator is known (for example, see Patent Document 1).
For example, the actuator (optical scanner) according to
そして、質量部上には光反射部が設けられており、捩りバネを捩れ変形させながら質量部を回動駆動させることにより、光反射部で反射した光を走査する。これにより、光走査により描画を行うことができる。
このような捩り振動子で構成されたアクチュエータにあっては、その共振周波数で駆動すると、安定的に駆動することができる。
A light reflecting part is provided on the mass part, and the light reflected by the light reflecting part is scanned by rotating the mass part while twisting and deforming the torsion spring. Thereby, drawing can be performed by optical scanning.
An actuator composed of such a torsional vibrator can be driven stably when driven at the resonance frequency.
従来、かかるアクチュエータにあっては、一般に、質量部の板面に対し反射式の光学センサを対向させ、その光学センサの検知結果に基づいて、質量部の挙動を検知するようになっている。この検知結果に基づき、質量部の挙動(周波数、振幅など)を所望のものとなるように駆動制御し、安定的に動作させることができる。
しかしながら、かかるアクチュエータにあっては、光学センサの検知対象を質量部の板面としているため、光学センサからの光を受光するための領域を光走査のための領域とは別途質量部の板面に設ける必要があるため、質量部が大型化してしまう。また、質量部の大型化に伴って質量部の慣性モーメントが増大してしまうため、アクチュエータの設計自由度が低くなってしまう。
Conventionally, in such an actuator, generally, a reflective optical sensor is opposed to the plate surface of the mass portion, and the behavior of the mass portion is detected based on the detection result of the optical sensor. Based on the detection result, the behavior (frequency, amplitude, etc.) of the mass part can be controlled to be a desired one and can be operated stably.
However, in such an actuator, since the detection target of the optical sensor is the plate surface of the mass part, the area for receiving the light from the optical sensor is separately from the area for optical scanning. Since it is necessary to provide in this, a mass part will enlarge. In addition, since the moment of inertia of the mass portion increases as the mass portion becomes larger, the degree of freedom in designing the actuator is reduced.
本発明の目的は、小型化を図るとともに、設計自由度を向上させつつ、安定した駆動を行うことができるアクチュエータを提供することにある。 An object of the present invention is to provide an actuator that can be stably driven while reducing the size and improving the degree of freedom in design.
このような目的は、下記の本発明により達成される。
本発明のアクチュエータは、板状をなす質量部と、
前記質量部を支持するための支持部と、
前記質量部を前記支持部に対し回動可能とするように、前記質量部と前記支持部とを連結する弾性連結部と、
前記質量部を回動駆動する駆動手段とを有し、
前記駆動手段が前記弾性連結部を捩れ変形させながら前記質量部を回動させるアクチュエータであって、
前記質量部の挙動を検知する挙動検知手段を有し、
前記挙動検知手段は、前記質量部の側面の通過を検知する反射式または透過式の光学センサを備え、該光学センサの検知結果に基づいて、前記質量部の挙動を検知するように構成されていることを特徴とする。
Such an object is achieved by the present invention described below.
The actuator of the present invention includes a plate-like mass part,
A support part for supporting the mass part;
An elastic coupling part that couples the mass part and the support part so that the mass part is rotatable with respect to the support part;
Drive means for rotationally driving the mass part,
An actuator for rotating the mass part while the driving means twists and deforms the elastic connecting part;
Having a behavior detecting means for detecting the behavior of the mass part;
The behavior detection means includes a reflective or transmissive optical sensor that detects passage of a side surface of the mass unit, and is configured to detect the behavior of the mass unit based on a detection result of the optical sensor. It is characterized by being.
これにより、挙動検知のための領域を質量部の板面に別途設けることなく、質量部の挙動を検知し、これに基づき、質量部を安定的に駆動することができる。特に、挙動検知のための領域を質量部の板面に別途設ける必要がないので、質量部の小型化、ひいてはアクチュエータの小型化を図ることができ、また、アクチュエータの設計自由度を向上させることができる。また、光学センサを用いるため、質量部に対し非接触でその挙動を検知することができ、質量部の回動を阻害することもない。 Thus, the behavior of the mass part can be detected without separately providing a region for behavior detection on the plate surface of the mass part, and based on this, the mass part can be driven stably. In particular, since it is not necessary to provide a separate area for detecting the behavior on the plate of the mass part, the mass part can be downsized, and the actuator can be downsized, and the degree of freedom in designing the actuator can be improved. Can do. Moreover, since an optical sensor is used, the behavior can be detected in a non-contact manner with respect to the mass part, and the rotation of the mass part is not hindered.
本発明のアクチュエータは、第1の質量部と、
前記第1の質量部を支持するための支持部と、
前記第1の質量部を前記支持部に対し回動可能とするように、前記第1の質量部と前記支持部とを連結する第1の弾性連結部と、
板状をなす第2の質量部と、
前記第2の質量部を前記第1の質量部に対し回動可能とするように、前記第2の質量部と前記第1の質量部とを連結する第2の弾性連結部と、
前記第1の質量部を回動駆動する駆動手段とを有し、
前記駆動手段が前記第1の弾性連結部を捩れ変形させながら前記第1の質量部を回動させ、これに伴い、前記第2の弾性連結部を捩れ変形させながら前記第2の質量部を回動させるアクチュエータであって、
前記第2の質量部の挙動を検知する挙動検知手段を有し、
前記挙動検知手段は、前記第1の質量部または前記第2の質量部の側面の通過を検知する反射式または透過式の光学センサを備え、該光学センサの検知結果に基づいて、前記第2の質量部の挙動を検知するように構成されていることを特徴とする。
The actuator of the present invention includes a first mass part,
A support part for supporting the first mass part;
A first elastic connecting portion that connects the first mass portion and the support portion so that the first mass portion is rotatable with respect to the support portion;
A second mass part in the form of a plate;
A second elastic connecting portion for connecting the second mass portion and the first mass portion so that the second mass portion is rotatable with respect to the first mass portion;
Drive means for rotationally driving the first mass part;
The drive means rotates the first mass portion while twisting and deforming the first elastic connecting portion, and accordingly, the second mass portion is deformed while twisting and deforming the second elastic connection portion. An actuator to rotate,
Having a behavior detecting means for detecting the behavior of the second mass part;
The behavior detection unit includes a reflective or transmissive optical sensor that detects passage of a side surface of the first mass unit or the second mass unit, and based on a detection result of the optical sensor, It is comprised so that the behavior of the mass part of may be detected.
これにより、挙動検知のための領域を第2の質量部の板面に別途設けることなく、第2の質量部の挙動を検知し、これに基づき、第2の質量部を安定的に駆動することができる。特に、挙動検知のための領域を第2の質量部の板面に別途設ける必要がないので、第2の質量部の小型化、ひいてはアクチュエータの小型化を図ることができ、また、アクチュエータの設計自由度を向上させることができる。また、光学センサを用いるため、第1の質量部や第2の質量部に対し非接触でその挙動を検知することができ、第1の質量部や第2の質量部の回動を阻害することもない。 Accordingly, the behavior of the second mass part is detected without separately providing a region for behavior detection on the plate surface of the second mass part, and based on this, the second mass part is stably driven. be able to. In particular, since it is not necessary to separately provide a region for detecting the behavior on the plate surface of the second mass portion, the second mass portion can be downsized, and the actuator can be downsized. The degree of freedom can be improved. Further, since the optical sensor is used, the behavior can be detected in a non-contact manner with respect to the first mass unit and the second mass unit, and the rotation of the first mass unit and the second mass unit is hindered. There is nothing.
本発明のアクチュエータでは、前記挙動検知手段は、前記第2の質量部の挙動として、前記第2の質量部の振動の振幅、振動数、変位量のうちの少なくとも1つを検知するように構成されていることが好ましい。
これにより、挙動検知手段の検知結果に基づいて、第2の質量部の振幅、振動数、位相を所望のものとし、より確実に、第2の質量部を安定的に駆動することができる。
In the actuator of the present invention, the behavior detecting means is configured to detect at least one of the vibration amplitude, the vibration frequency, and the displacement amount of the second mass portion as the behavior of the second mass portion. It is preferable that
Thereby, based on the detection result of the behavior detection means, the amplitude, vibration frequency, and phase of the second mass part can be set as desired, and the second mass part can be driven more reliably and stably.
本発明のアクチュエータでは、前記光学センサは、前記第1の質量部または前記第2の質量部の側方からその回動空間に向け光を発光する発光部と、前記発光部で発光された光を受光する受光部とを備え、前記挙動検知手段は、前記受光部によって受光された光の強度に基づいて、前記第2の質量部の挙動を検知するように構成されていることが好ましい。
これにより、発光部と受光部とで透過式または反射式の光学センサを構成し、第2の質量部の挙動をより正確に検知することができる。
In the actuator according to the aspect of the invention, the optical sensor includes a light emitting unit that emits light toward a rotation space from a side of the first mass unit or the second mass unit, and light emitted from the light emitting unit. It is preferable that the behavior detecting unit is configured to detect the behavior of the second mass unit based on the intensity of light received by the light receiving unit.
Thereby, the light-emitting part and the light-receiving part constitute a transmissive or reflective optical sensor, and the behavior of the second mass part can be detected more accurately.
本発明のアクチュエータでは、前記発光部は、前記第1の質量部または前記第2の質量部の回動中心軸に沿った方向に光を照射することが好ましい。
これにより、第2の質量部の回動中心軸に直角な方向に、アクチュエータが大型化するのを防止することができる。
本発明のアクチュエータでは、前記発光部と前記受光部は、互いに前記回動空間を介して配設され、これらの対象とする前記第1の質量部または前記第2の質量部が所定の回動角となったときのみ、前記発光部から前記受光部への光が前記第1の質量部または前記第2の質量部によって遮断され、前記受光部での受光の有無に基づいて、前記第2の質量部の挙動を検知することが好ましい。
これにより、発光部と受光部とで透過式の光学センサを構成し、第2の質量部の挙動をより正確に検知することができる。
In the actuator according to the aspect of the invention, it is preferable that the light emitting unit emits light in a direction along a rotation center axis of the first mass unit or the second mass unit.
Thereby, it is possible to prevent the actuator from increasing in size in a direction perpendicular to the rotation center axis of the second mass unit.
In the actuator according to the aspect of the invention, the light emitting unit and the light receiving unit are disposed with respect to each other through the rotation space, and the first mass unit or the second mass unit as a target of these is rotated with a predetermined rotation. Only when it becomes a corner, the light from the light emitting unit to the light receiving unit is blocked by the first mass unit or the second mass unit, and based on the presence or absence of light reception by the light receiving unit, the second It is preferable to detect the behavior of the mass part.
Thereby, a light transmission part and a light-receiving part constitute a transmissive optical sensor, and the behavior of the second mass part can be detected more accurately.
本発明のアクチュエータでは、前記発光部と前記受光部は、ともに前記回動空間に対し一方の側に配設され、これらの対象とする前記第1の質量部または前記第2の質量部が所定の回動角となったときのみ、前記発光部からの光が前記第1の質量部または前記第2の質量部の側面にて反射して前記受光部で受光され、前記受光部での受光の有無に基づいて、前記第2の質量部の挙動を検知することが好ましい。
これにより、発光部と受光部とで反射式の光学センサを構成し、第2の質量部の挙動をより正確に検知することができる。
In the actuator according to the aspect of the invention, the light emitting unit and the light receiving unit are both disposed on one side with respect to the rotation space, and the first mass unit or the second mass unit as a target of these is predetermined. The light from the light emitting part is reflected by the side surface of the first mass part or the second mass part and is received by the light receiving part only when the rotation angle becomes, and the light receiving part receives the light. It is preferable to detect the behavior of the second mass part based on the presence or absence of the.
Thereby, a reflective optical sensor is comprised with a light emission part and a light-receiving part, and the behavior of a 2nd mass part can be detected more correctly.
本発明のアクチュエータでは、前記発光部および前記受光部は、その対象とする非駆動状態の前記第1の質量部または前記第2の質量部に対しその板厚方向にずれて配置されていることが好ましい。
これにより、単振動を起こしている第1の質量部および/または第2の質量部の回動中心軸から一定の距離を隔てた部位の通過を光学センサが検知することにより、その通過時刻に基づいて、第1の質量部および/または第2の質量部の回動方向や回動速度を知ることができる。すなわち、第1の質量部および/または第2の質量部の挙動(位相、振動数、絶対変位)を光学センサの検知結果から直接的に(単振動を起こしているところから推定することなく)求めることができる。
In the actuator of the present invention, the light emitting unit and the light receiving unit are arranged to be shifted in the plate thickness direction with respect to the first mass unit or the second mass unit in the non-driven state as a target. Is preferred.
As a result, the optical sensor detects the passage of a part of the first mass part and / or the second mass part that is causing simple vibrations at a certain distance from the rotation center axis, so that the passage time is reached. Based on this, it is possible to know the rotational direction and rotational speed of the first mass part and / or the second mass part. That is, the behavior (phase, frequency, absolute displacement) of the first mass part and / or the second mass part is directly (without estimating from the location where the single vibration is caused) from the detection result of the optical sensor. Can be sought.
本発明のアクチュエータでは、前記発光部は、発光素子および光導波路を有し、前記発光素子が前記光導波路を介して前記回動空間へ光を照射するように構成されていることが好ましい。
これにより、第2の質量部が薄くても、比較的簡単に、発光部からの光の径を第2の質量部の厚さ以下とすることができる。その結果、アクチュエータの設計自由度をより向上させるとともに、光学センサの検知精度を向上することができる。
In the actuator according to the aspect of the invention, it is preferable that the light emitting unit includes a light emitting element and an optical waveguide, and the light emitting element is configured to irradiate the rotation space with light through the optical waveguide.
Thereby, even if the 2nd mass part is thin, the diameter of the light from a light emission part can be made below into the thickness of the 2nd mass part comparatively easily. As a result, the degree of freedom in designing the actuator can be further improved, and the detection accuracy of the optical sensor can be improved.
本発明のアクチュエータでは、前記受光部は、受光素子および光導波路を有し、前記受光素子が前記光導波路を介して受光するように構成されていることが好ましい。。
これにより、第2の質量部が薄くても、比較的簡単に、受光部の径を第2の質量部の厚さ以下とすることができる。その結果、アクチュエータの設計自由度をより向上させるとともに、光学センサの検知精度を向上することができる。
In the actuator according to the aspect of the invention, it is preferable that the light receiving unit includes a light receiving element and an optical waveguide, and the light receiving element is configured to receive light through the optical waveguide. .
As a result, even if the second mass part is thin, the diameter of the light receiving part can be made equal to or less than the thickness of the second mass part, relatively easily. As a result, the degree of freedom in designing the actuator can be further improved, and the detection accuracy of the optical sensor can be improved.
本発明のアクチュエータでは、前記第2の質量部は、光反射部を有していることが好ましい。
これにより、光スキャナ、光スイッチ、光アッテネータなどの光学デバイスに本発明を適用することができる。
本発明のアクチュエータでは、前記挙動検知手段によって検知された挙動に基づいて、前記駆動手段の駆動を制御する制御手段を有することが好ましい。
これにより、第1の質量部および/または第2の質量部を安定して駆動することができる。
In the actuator according to the aspect of the invention, it is preferable that the second mass unit has a light reflecting unit.
Thereby, the present invention can be applied to optical devices such as an optical scanner, an optical switch, and an optical attenuator.
The actuator according to the aspect of the invention preferably includes a control unit that controls the driving of the driving unit based on the behavior detected by the behavior detecting unit.
Thereby, the 1st mass part and / or the 2nd mass part can be driven stably.
以下、本発明のアクチュエータの好適な実施形態について、添付図面を参照しつつ説明する。
<第1実施形態>
まず、本発明のアクチュエータの第1実施形態を説明する。
図1は、本発明のアクチュエータの第1実施形態を示す平面図、図2は、図1中のA−A線断面図、図3は、図1中のB−B線断面図、図4は、図1に示すアクチュエータの電極の配置を示す平面図、図5は、図1に示すアクチュエータの制御系を示すブロック図、図6は、図1に示すアクチュエータの駆動電圧の一例(交流電圧)を示す図、図7は、印加した交流電圧の周波数と、第1の質量部および第2の質量部の振幅との関係を示すグラフ、図8は、図1に示すアクチュエータに備えられた光学センサを説明するための斜視図、図9は、図1に示すアクチュエータに備えられた光学センサの動作を説明するための図である。なお、以下では、説明の便宜上、図1および図4中の紙面手前側を「上」、紙面奥側を「下」、右側を「右」、左側を「左」と言い、図2中の上側を「上」、下側を「下」、右側を「右」、左側を「左」と言い、図3中の上側を「上」、下側を「下」、紙面手前側を「右」、紙面奥側を「左」と言う。
DESCRIPTION OF EXEMPLARY EMBODIMENTS Hereinafter, preferred embodiments of an actuator of the invention will be described with reference to the accompanying drawings.
<First Embodiment>
First, a first embodiment of the actuator of the present invention will be described.
1 is a plan view showing a first embodiment of the actuator of the present invention, FIG. 2 is a cross-sectional view taken along line AA in FIG. 1, FIG. 3 is a cross-sectional view taken along line BB in FIG. 1 is a plan view showing the arrangement of electrodes of the actuator shown in FIG. 1, FIG. 5 is a block diagram showing a control system of the actuator shown in FIG. 1, and FIG. 6 is an example of the drive voltage of the actuator shown in FIG. FIG. 7 is a graph showing the relationship between the frequency of the applied AC voltage and the amplitude of the first and second mass parts, and FIG. 8 is provided in the actuator shown in FIG. FIG. 9 is a perspective view for explaining the optical sensor, and FIG. 9 is a view for explaining the operation of the optical sensor provided in the actuator shown in FIG. In the following, for convenience of explanation, the front side of the page in FIGS. 1 and 4 is referred to as “up”, the back side of the page is referred to as “down”, the right side is referred to as “right”, and the left side is referred to as “left”. The upper side is “upper”, the lower side is “lower”, the right side is “right”, the left side is “left”, the upper side in FIG. 3 is “upper”, the lower side is “lower”, and the front side of the page is “right” "The back side of the page is called" left ".
アクチュエータ1は、図1に示すように、2自由度振動系を有する基体2を有しており、この基体2の下面には、対向基板3が接合層4を介して接合され、この基体2の上面には、2自由度振動系の挙動(駆動状態)を検知するための光学センサ10が設けられている。
基体2は、一対の第1の質量部(駆動部)21、22と、上面(後述する対向基板3とは反対側の面)に光反射部231が設けられた第2の質量部(可動部)23と、これらを支持するための支持部24とを備えている。
具体的には、基体2は、第2の質量部23を中心として、その一端側(図1および図2中、左側)に第1の質量部21が設けられ、他端側(図1および図2中、右側)に第1の質量部22が設けられて構成されている。
As shown in FIG. 1, the
The
Specifically, the
また、本実施形態では、第1の質量部21、22は、互いにほぼ同一形状かつほぼ同一寸法をなし、第2の質量部23を介して、ほぼ対称に設けられている。
また、第2の質量部23上には、光反射部231が設けられている。これにより、アクチュエータ1を、光スキャナ、光スイッチ、光アッテネータなどの光学デバイスに適用することができる。
さらに、基体2は、図1および図2に示すように、第1の質量部21、22と支持部24とを連結する一対の第1の弾性連結部25、25と、第1の質量部21、22と第2の質量部23とを連結する一対の第2の弾性連結部26、26とを備えている。
In the present embodiment, the
Further, a
Further, as shown in FIGS. 1 and 2, the
各第1の弾性連結部25、25および各第2の弾性連結部26、26は、同軸的に設けられており、これらを回動中心軸(回転軸)27として、第1の質量部21、22が支持部24に対して、また、第2の質量部23が第1の質量部21、22に対して回動可能となっている。
このように、基体2は、第1の質量部21、22と第1の弾性連結部25、25とからなる第1の振動系と、第2の質量部23と第2の弾性連結部26、26とからなる第2の振動系とで構成された2自由度振動系を有している。
The first elastic connecting
As described above, the
本実施形態では、このような2自由度振動系は、基体2の全体の厚さよりも薄く形成されているとともに、図2にて上下方向で基体2の上部に位置している。換言すれば、基体2には、基体2の全体の厚さよりも薄い部分(以下、薄肉部という)が形成されており、この薄肉部に異形孔が形成されることにより、第1の質量部21、22と第2の質量部23と第1の弾性連結部25、25と第2の弾性連結部26、26とが形成されている。
また、本実施形態では、前記薄肉部の上面が支持部24の上面と同一面上に位置することにより、前記薄肉部の下方には、各質量部21、22、23の回動のための空間(凹部)28が形成される。
In the present embodiment, such a two-degree-of-freedom vibration system is formed thinner than the entire thickness of the
Moreover, in this embodiment, when the upper surface of the said thin part is located on the same surface as the upper surface of the
このような基体2は、例えば、シリコンを主材料として構成されていて、第1の質量部21、22と、第2の質量部23と、支持部24と、第1の弾性連結部25、25と、第2の弾性連結部26、26とが一体的に形成されている。
なお、基体2は、SOI基板等の積層構造の基板から、第1の質量部21、22と、第2の質量部23と、支持部24と、第1の弾性連結部25、25と、第2の弾性連結部26、26を形成したものであってもよい。
Such a
Note that the
このような基体2の下面には、接合層4を介して対向基板3が接合されている。
対向基板3は、例えば、シリコンまたはガラスを主材料として構成されている。
対向基板3の上面には、図2および図4に示すように、第2の質量部23に対応する部分に開口部31が形成されている。
この開口部31は、第2の質量部23が回動(振動)する際に、対向基板3に接触するのを防止する逃げ部を構成する。開口部(逃げ部)31を設けることにより、アクチュエータ1全体の大型化を防止しつつ、第2の質量部23の振れ角(振幅)をより大きく設定することができる。アクチュエータ1において、対向基板3がシリコンを主材料として構成されている場合、ガラス材料などで対向基板が構成されている場合に比し、前述のような開口部などの逃げ部を簡単にそして高精度(高アスペクト比)に形成することができる。
The
The
As shown in FIGS. 2 and 4, an
The
なお、逃げ部は、前記効果を十分に発揮し得る構成であれば、必ずしも対向基板3の下面(第2の質量部23と反対側の面)で開放(開口)していなくてもよい。すなわち、逃げ部は、対向基板3の上面に形成された凹部で構成することもできる。また、空間28の深さが第2の質量部23の振れ角(振幅)に対し大きい場合などには、逃げ部を設けなくともよい。
Note that the relief portion does not necessarily have to be opened (opened) on the lower surface (the surface opposite to the second mass portion 23) of the
また、対向基板3の上面(基体2側の面)には、図4に示すように、第1の質量部21に対応する部分に、後述の接合層4を介して、一対の電極32が回動中心軸27を中心にほぼ対称となるように設けられ、また、第1の質量部22に対応する部分に、後述の接合層4を介して、一対の電極32が回動中心軸27を中心にほぼ対称となるように設けられている。すなわち、本実施形態では、一対の電極32が2組(合計4個)、設けられている。
Further, as shown in FIG. 4, a pair of
第1の質量部21、22と各電極32とは、後述する通電回路13に接続されており、第1の質量部21、22と各電極32との間に交流電圧(駆動電圧)を印加できるよう構成されている。すなわち、第1の質量部21、22と各電極32とが、第2の質量部23(より具体的には第1の質量部21、22)を駆動するための駆動手段を構成する。
なお、第1の質量部21、22は、各電極32と対向する面に、それぞれ、絶縁膜(図示せず)が設けられている。これにより、第1の質量部21、22と各電極32との間での短絡が発生するのが好適に防止される。
The
In addition, the
接合層4は、基体2と対向基板3とを接合する機能を有するものである。したがって、接合層4の構成材料は、前記接合が可能なものであれば特に限定されないが、基体2および対向基板3のそれぞれがシリコンを主材料として構成されている場合には、NaイオンやKイオンのようなアルカリ金属イオンなどの可動イオンを含むガラスを用いるのが好ましい。これにより、ともにシリコンを主材料として構成された基体2と対向基板3とを接合層4を介して陽極接合させることができる。
The bonding layer 4 has a function of bonding the
また、本実施形態では、接合層4の上面に上述の電極32が設けられている。これにより、電極32と第1の質量部21、22との間のギャップを調整することができる。また、接合層4を絶縁性を有する材料で構成することにより、電極32と対向基板3との間の絶縁性を確保することができる。
また、前述した基体2の上面には、前述した第2の質量部23の側面の通過を検知する透過式の光学センサ10が設けられている。
In the present embodiment, the above-described
In addition, a transmissive
光学センサ10は、第2の質量部23の回動空間に向け発光する発光部11と、当該回動空間を介して発光部11からの光を受光する受光部12とを有している。
発光部11は、第2の質量部23の側方(図1にて右側)からその回動空間に向け光を発光するものであり、光導波路111と、発光素子112とを有している。
光導波路111は、光伝送経路である線状のコア部113と、このコア部113の外周を覆うクラッド部114と有している。
The
The
The
コア部113は、その屈折率がクラッド部114の屈折率よりも高くなっており、光伝送経路を構成している。
このようなコア部113の外周を覆うクラッド部114は、前述した基体2の支持部24上に接合しており、コア部113を支持している。
また、線状のコア部113の両端面のうち、一端面115は第2の質量部23の回動空間に対向し、他端面116は発光素子112に接続されている。これにより、コア部113を通じて、発光素子112の光を第2の質量部23の回動空間へ照射することができる。
発光素子112は、特に限定されず、各種発光素子を用いることができるが、例えば、発光ダイオード、発光FET、EL素子などを好適に用いることができる。
The
The
Further, of the both end surfaces of the
The
一方、受光部12は、前述した発光部11からの光を受光するものであり、光導波路121と、受光素子122とを有している。
光導波路121は、前述した光導波路111と同様に、光伝送経路である線状のコア部123と、このコア部123の外周を覆うクラッド部124と有している。
コア部123は、その屈折率がクラッド部124の屈折率よりも高くなっており、光伝送経路を構成している。
On the other hand, the
Similar to the
The
このようなコア部123の外周を覆うクラッド部124は、前述した基体2の支持部24上に接合しており、コア部123を支持している。
また、線状のコア部123の両端面のうち、一端面125は第2の質量部23の回動空間に対向し、他端面126は受光素子122に接続されている。これにより、コア部123を通じて、発光素子112から第2の質量部23の回動空間を通過した光を受光素子122で受光することができる。
The clad
Further, of the both end faces of the
受光素子122は、発光素子112の光を受光することができるものであれば、特に限定されず、光電管、光電子増倍管、光導電セル、フォトダイオード、フォトトランジスタ、アバランシュフォトダイオード、焦電型赤外素子などの各種受光素子を用いることができるが、例えば、光電管、光電子増倍管、フォトダイオードなどを好適に用いることができる。
このような光学センサ10は、前述した駆動手段の駆動(具体的には通電回路13の駆動)を制御する制御回路14に接続されている。これにより、光学センサ10の検知結果に基づき、アクチュエータ1の駆動を制御することができる。
The
Such an
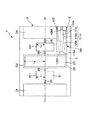
以下、図5に基づき、アクチュエータ1の制御系を詳細に説明する。
図5に示すように、本実施形態のアクチュエータ1において、前述した電極32は、通電回路13に接続されている。この通電回路13は、各電極32と第1の質量部21、22との間に電圧を選択的に印加する(電位差を生じさせる)ものである。
そして、この通電回路13は、通電回路13の駆動を制御する機能を有する制御回路14に接続されている。
Hereinafter, the control system of the
As shown in FIG. 5, in the
The
この制御回路14には、前述した光学センサ10の受光素子122(受光部12)が接続されており、制御回路14は、受光素子122の検知結果に基づいて、通電回路13の駆動を制御するようになっている。
すなわち、制御回路14は、受光部12によって受光された光の強度に基づいて第2の質量部23の挙動を検知する機能と、その検知結果に基づいて駆動手段の駆動(通電回路13の駆動)を制御する機能とを有している。
The
That is, the
さらに言い換えれば、制御回路14と光学センサ10とが、第2の質量部23の挙動を検知する挙動検知手段を構成するとともに、制御回路14が、この挙動検知手段によって検知された挙動に基づいて駆動手段の駆動を制御する制御手段を構成する。これにより、第1の質量部21、22および/または第2の質量部23を安定して駆動することができる。
より具体的に説明すると、制御回路14は、図5に示すように、CPU141、AD変換回路142、ROM143、RAM144を有している。
そして、CPU141は、通電回路13に接続されているとともに、AD変換回路142を介して受光素子122に接続されている。
In other words, the
More specifically, the
The
AD変換回路142は、受光素子122の出力をアナログからデジタルに変換するものである。
ROM143は、受光素子122の検知強度に基づいて第2の質量部23の挙動を算出するためのプログラムや、算出された挙動に基づいて通電回路13を制御するためのプログラムなどが格納されている。
The
The
RAM144は、プログラムにより算出された値等を記憶する機能を有する。
CPU141は、ROM143に格納されたプログラムに従い、AD変換回路142でデジタル化された検知強度に基づき、第2の質量部23の挙動を検知する。また、CPU141は、ROM143に格納されたプログラムに従い、検知した挙動に基づき、第2の質量部23の挙動を所望のものとするように、通電回路13を制御する。
The
The
このように、本実施形態のアクチュエータ1では、第2の質量部23の側面の通過を検知する透過式の光学センサ10の検知結果に基づいて、第2の質量部23の挙動を検知するように構成されている。
これにより、挙動検知のための領域を第2の質量部23の板面に別途設けることなく、第2の質量部23の挙動を検知し、これに基づき、第2の質量部23を安定的に駆動することができる。特に、挙動検知のための領域を第2の質量部23の板面に別途設ける必要がないので、第2の質量部23の小型化、ひいてはアクチュエータ1の小型化を図ることができ、また、アクチュエータ1の設計自由度を向上させることができる。
As described above, in the
Accordingly, the behavior of the
以上のような構成のアクチュエータ1は、次のようにして駆動する。
すなわち、第1の質量部21、22と各電極32との間に、例えば、正弦波(交流電圧)等を印加する。具体的には、例えば、第1の質量部21、22をアースしておき、図4中上側の2つの電極32に、図6(a)に示すような波形の電圧を印加し、図4中下側の2つの電極32に、図6(b)に示すような波形の電圧を印加する。すると、第1の質量部21、22と各電極32との間に静電気力(クーロン力)が生じる。
The
That is, for example, a sine wave (AC voltage) or the like is applied between the
この静電気力により、第1の質量部21、22が、各電極32の方へ引きつけられる力が正弦波の位相により変化し、回動中心軸27(第1の弾性連結部25)を軸に、基体2の板面(図1における紙面)に対して傾斜するように振動(回動)する。
そして、この第1の質量部21、22の振動(駆動)に伴って、第2の弾性連結部26を介して連結されている第2の質量部23も、回動中心軸27(第2の弾性連結部26)を軸に、基体2の板面(図1における紙面)に対して傾斜するように振動(回動)する。
したがって、第2の質量部23の回動に伴い、光反射部231も回動し、光反射部231に照射された光を走査することができる。
Due to this electrostatic force, the force that the first
The
Therefore, as the
ここで、このアクチュエータ1では、前述したように、対向基板3における、第2の質量部23に対応する部分に、開口部31が形成され、また、図2にて基体2の下面に空間28が形成され、かつ、平面視で第1の質量部21、22が空間(凹部)28内に位置するように設けられている。
このような構成により、第2の質量部23が振動し得るスペース、および、第1の質量部21、22が振動し得るスペースとして、大きなスペースが確保されている。したがって、第1の質量部21、22の質量を比較的小さく設定すること等により、第1の質量部21、22を大きな振れ角で振動させた場合や、さらに第2の質量部23が共振によって大きな振れ角で振動した場合でも、各質量部21、22、23(2自由度振動系)が対向基板3に接触することを好適に防止することができる。
このため、このようなアクチュエータ1を、例えば光スキャナに適用した場合には、より解像度の高いスキャニングを行うことが可能となる。
Here, in the
With such a configuration, a large space is secured as a space where the
For this reason, when such an
ここで、第1の質量部21の回動中心軸からこれにほぼ垂直な方向(長手方向)への長さ(回動中心軸と端部211との間の距離)をL1とし、第1の質量部22の回動中心軸からこれにほぼ垂直な方向(長手方向)への長さ(回動中心軸と端部221との間の距離)をL2とし、第2の質量部23の回動中心軸からこれにほぼ垂直な方向への長さ(回動中心軸と端部232との間の距離)をL3としたとき、本実施形態では、第1の質量部21、22が、それぞれ独立して設けられているため、第1の質量部21、22と、第2の質量部23とが干渉せず、第2の質量部23の大きさ(長さL3)にかかわらず、L1およびL2を小さくすることができる。これにより、第1の質量部21、22の回転角度(振れ角)を大きくすることができ、第2の質量部23の回転角度を大きくすることができる。
また、L1およびL2を小さくすることにより、第1の質量部21、22と各電極32との間の距離を小さくすることができ、これにより、静電気力が大きくなり、第1の質量部21、22と各電極32に印加する交流電圧を小さくすることができる。
Here, the length of a direction substantially perpendicular to the rotational axis of the first mass portion 21 (longitudinal direction) (the distance between the rotational axis and the edge 211) and L 1, the substantially perpendicular from the rotation center axis of the
In addition, by reducing L 1 and L 2 , the distance between the
ここで、第1の質量部21、22および第2の質量部23の寸法は、それぞれ、L1<L3かつL2<L3なる関係を満足するよう設定されている。これにより、L1およびL2をより小さくすることができ、第1の質量部21、22の回転角度をより大きくすることができ、第2の質量部23の回転角度をさらに大きくすることができる。
この場合、第2の質量部23の最大回転角度が、20°以上となるように構成されるのが好ましい。
また、このように、L1およびL2を小さくすることにより、第1の質量部21、22と各電極32との間の距離をより小さくすることができ、第1の質量部21、22と各電極32に印加する交流電圧をさらに小さくすることができる。
Here, the dimension of the first
In this case, it is preferable that the maximum rotation angle of the
In addition, by reducing L 1 and L 2 in this way, the distance between the
これらによって、第1の質量部21、22の低電圧駆動と、第2の質量部23の大回転角度での振動(回動)とを実現することができる。
このため、このようなアクチュエータ1を、例えばレーザープリンタや、走査型共焦点レーザー顕微鏡等の装置に用いられる光スキャナに適用した場合には、より容易に装置の小型化を図ることができる。
なお、前述したように、本実施形態では、L1とL2とはほぼ等しく設定されているが、L1とL2とが異なっていてもよいことは言うまでもない。
By these, the low voltage drive of the
For this reason, when such an
As described above, in the present embodiment, L 1 and L 2 are set to be substantially equal, but it goes without saying that L 1 and L 2 may be different.
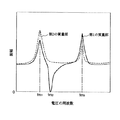
ところで、このような質量部21、22、23よりなる振動系(2自由度振動系)では、第1の質量部21、22および第2の質量部23の振幅(振れ角)と、印加する交流電圧の周波数との間に、図7に示すような周波数特性が存在している。
すなわち、かかる振動系は、第1の質量部21、22の振幅と、第2の質量部23の振幅とが大きくなる2つの共振周波数fm1[kHz]、fm3[kHz](ただし、fm1<fm3)と、第1の質量部21、22の振幅がほぼ0となる、1つの反共振周波数fm2[kHz]とを有している。
By the way, in such a vibration system (two-degree-of-freedom vibration system) composed of the
That is, the vibration system includes two resonance frequencies fm 1 [kHz] and fm 3 [kHz] (however, fm) in which the amplitude of the
この振動系では、第1の質量部21、22と電極32との間に印加する交流電圧の周波数Fが、2つの共振周波数のうち低いもの、すなわち、fm1とほぼ等しくなるように設定するのが好ましい。これにより、第1の質量部21、22の振幅を抑制しつつ、第2の質量部23の振れ角(回転角度)を大きくすることができる。
なお、本明細書中では、F[kHz]とfm1[kHz]とがほぼ等しいとは、(fm1−1)≦F≦(fm1+1)の条件を満足することを意味する。
In this vibration system, the frequency F of the AC voltage applied between the
In this specification, F [kHz] and fm 1 [kHz] being substantially equal means that the condition of (fm 1 −1) ≦ F ≦ (fm 1 +1) is satisfied.
第1の質量部21、22の平均厚さは、それぞれ、1〜1500μmであるのが好ましく、10〜300μmであるのがより好ましい。
第2の質量部23の平均厚さは、1〜1500μmであるのが好ましく、10〜300μmであるのがより好ましい。
第1の弾性連結部25のばね定数k1は、1×10−4〜1×104Nm/radであるのが好ましく、1×10−2〜1×103Nm/radであるのがより好ましく、1×10−1〜1×102Nm/radであるのがさらに好ましい。これにより、第2の質量部23の回転角度(振れ角)をより大きくすることができる。
The average thicknesses of the
The average thickness of the second
The spring constant k 1 of the first elastic connecting
一方、第2の弾性連結部26のばね定数k2は、1×10−4〜1×104Nm/radであるのが好ましく、1×10−2〜1×103Nm/radであるのがより好ましく、1×10−1〜1×102Nm/radであるのがさらに好ましい。これにより、第1の質量部21、22の振れ角を抑制しつつ、第2の質量部23の振れ角をより大きくすることができる。
また、第1の弾性連結部25のばね定数k1と第2の弾性連結部26のばね定数をk2とは、k1>k2なる関係を満足するのが好ましい。これにより、第1の質量部21、22の振れ角を抑制しつつ、第2の質量部23の回転角度(振れ角)をより大きくすることができる。
On the other hand, the spring constant k 2 of the second
Further, the spring constant k 1 of the first elastic connecting
さらに、第1の質量部21、22の慣性モーメントをJ1とし、第2の質量部23の慣性モーメントをJ2としたとき、J1とJ2とは、J1≦J2なる関係を満足することが好ましく、J1<J2なる関係を満足することがより好ましい。これにより、第1の質量部21、22の振れ角を抑制しつつ、第2の質量部23の回転角度(振れ角)をより大きくすることができる。
Furthermore, the moment of inertia of the first
ところで、第1の質量部21、22と第1の弾性連結部25、25とからなる第1の振動系の固有振動数ω1は、第1の質量部21、22の慣性モーメントJ1と、第1の弾性連結部25のばね定数k1とにより、ω1=(k1/J1)1/2によって与えられる。一方、第2の質量部23と第2の弾性連結部26、26とからなる第2の振動系の固有振動数ω2は、第2の質量部23の慣性モーメントJ2と、第2の弾性連結部26のばね定数k2とにより、ω2=(k2/J2)1/2によって与えられる。
このようにして求められる第1の振動系の固有振動数ω1と第2の振動系の固有振動数ω2とは、ω1>ω2なる関係を満足するのが好ましい。これにより、第1の質量部21、22の振れ角を抑制しつつ、第2の質量部23の回転角度(振れ角)をより大きくすることができる。
Incidentally, the natural frequency ω 1 of the first vibration system composed of the
It is preferable that the natural frequency ω 1 of the first vibration system and the natural frequency ω 2 of the second vibration system obtained in this way satisfy the relationship ω 1 > ω 2 . Thereby, it is possible to increase the rotation angle (deflection angle) of the
ここで、図8、図9に基づいて、第2の質量部23の挙動の検知の一例をより具体的に説明する。
第2の質量部23は、非駆動状態(ホームポジション)にあるとき、図8および図9(a)に示すように、発光部11のコア部113の一端面115と受光部12のコア部123の一端面125とのそれぞれよりも下方に位置している。すなわち、発光部11および受光部12は、その対象(光学センサ10の検知対象)とする非駆動状態の第2の質量部23に対しその板厚方向にずれて配置されている。これにより、単振動を起こしている第2の質量部23の回動中心軸27から一定の距離を隔てた部位の通過を光学センサ10が検知することにより、その通過時刻に基づいて、第2の質量部23の回動方向や回動速度を知ることができる。すなわち、第2の質量部23の挙動(位相、振動数、絶対変位)を光学センサ10の検知結果から直接的に(第2の質量部23が単振動を起こしているところから推定することなく)求めることができる。
Here, based on FIG. 8, FIG. 9, an example of the detection of the behavior of the 2nd
When the
そして、アクチュエータ1が駆動状態となると、第2の質量部23が、図9(b)に示すように、発光部11から受光部12への光を一時的に遮った後、図9(c)に示すように、振れ角が最大となる位置へ至る。
その後、第2の質量部23が、図9(d)に示すように、発光部11から受光部12への光を再度一時的に遮った後、図9(e)に示すように、ホームポジションへ至る。
Then, when the
Thereafter, as shown in FIG. 9D, the
前述したように第2の質量部23は単振動し、かつ、光学センサ10は固定配置されているので、発光部11から受光部12への光が遮られるタイミングや時間長さを計測に基づいて、第2の質量部23の挙動を検知することができる。
また、本実施形態では、前述したように、発光部11と受光部12とが互いに第2の質量部23の回動空間を介して配設され、これらの対象(光学センサ10の検知対象)とする第2の質量部23が所定の回動角となったときのみ、発光部11から受光部12への光が第2の質量部23によって遮断され、受光部12での受光の有無に基づいて、第2の質量部23の挙動を検知する。これにより、発光部11と受光部12とで透過式の光学センサ10を構成し、第2の質量部23の挙動をより正確に検知することができる。
As described above, since the
Further, in the present embodiment, as described above, the
また、発光部11は、第1の質量部21、22または第2の質量部23の回動中心軸27に沿った方向に光を照射するので、第2の質量部23の回動中心軸27に直角な方向に、アクチュエータ1が大型化するのを防止することができる。
また、発光部11および受光部12は、その対象とする非駆動状態の第2の質量部23に対しその板厚方向にずれて配置されているので、これにより、単振動を起こしている第2の質量部23の回動中心軸27から一定の距離を隔てた部位の通過を光学センサ10が検知することにより、その通過時刻に基づいて、第2の質量部23の回動方向や回動速度を知ることができる。すなわち、第2の質量部23の挙動(位相、振動数、絶対変位)を光学センサ10の検知結果から直接的に(第2の質量部23が単振動を起こしているところから推定することなく)求めることができる。
Moreover, since the
In addition, since the
また、発光素子112が光導波路111を介して第2の質量部23の回動空間へ光を照射するように構成されているので、第2の質量部23が薄くても、比較的簡単に、発光部11からの光の径を第2の質量部23の厚さ以下とすることができる。その結果、アクチュエータ1の設計自由度をより向上させるとともに、光学センサ10の検知精度を向上することができる。
また、受光素子122が光導波路121を介して受光するように構成されているので、第2の質量部23が薄くても、比較的簡単に、受光部12の径を第2の質量部23の厚さ以下とすることができる。その結果、アクチュエータ1の設計自由度をより向上させるとともに、光学センサ10の検知精度を向上することができる。
Further, since the
Further, since the
このようなアクチュエータ1は、例えば、次のようにして製造することができる。
図10、図11は、それぞれ、第1実施形態のアクチュエータの製造方法を説明するための図(縦断面図)である。なお、以下では、説明の便宜上、図10、図11中の上側を「上」、下側を「下」と言う。
Such an
10 and 11 are views (longitudinal sectional views) for explaining the manufacturing method of the actuator of the first embodiment. Hereinafter, for convenience of explanation, the upper side in FIGS. 10 and 11 is referred to as “upper” and the lower side is referred to as “lower”.
[A1] まず、図10(a)に示すように、シリコン基板5を用意する。
次に、シリコン基板5の一方の面に、図10(b)に示すように、支持部24と各質量部21、22、23との形状に対応するように、例えば、アルミニウム等により金属マスク6を形成する。
そして、図10(c)に示すように、シリコン基板5の他方の面に、フォトレジストを塗布し、露光、現像を行う。これにより、図10(c)に示すように、支持部24の形状に対応するように、レジストマスク7を形成する。なお、レジストマスク7の形成は、金属マスク6の形成よりも先に行ってもよい。
金属マスク6の形成方法としては、真空蒸着、スパッタリング(低温スパッタリング)、イオンプレーティング等の乾式メッキ法、電解メッキ、無電解メッキ等の湿式メッキ法、溶射法、金属箔の接合等が挙げられる。なお、以下の各工程における金属膜の成膜においても、同様の方法を用いることができる。
[A1] First, as shown in FIG. 10A, a
Next, on one surface of the
Then, as shown in FIG. 10C, a photoresist is applied to the other surface of the
Examples of the method of forming the
次に、このレジストマスク7を介して、シリコン基板5の前記他方の面をエッチングした後、レジストマスク7を除去する。これにより、図10(d)に示すように、支持部24に対応する部分以外の領域に凹部51が形成される。
エッチング方法としては、例えば、プラズマエッチング、リアクティブイオンエッチング、ビームエッチング、光アシストエッチング等の物理的エッチング法、ウェットエッチング等の化学的エッチング法等のうちの1種または2種以上を組み合わせて用いることができる。なお、以下の各工程におけるエッチングにおいても、同様の方法を用いることができる。
Next, after etching the other surface of the
As an etching method, for example, one or more of physical etching methods such as plasma etching, reactive ion etching, beam etching, and light-assisted etching, and chemical etching methods such as wet etching are used in combination. be able to. Note that the same method can be used for etching in the following steps.
次に、金属マスク6を介して、シリコン基板5の前記一方の面側を、前記凹部51に対応する部分が貫通するまでエッチングする。
そして、金属マスク6を除去した後、図10(e)に示すように、第2の質量部23上に金属膜を成膜して、光反射部231を形成する。
なお、ここで、シリコン基板5をエッチングを行った後、金属マスク6は除去してもよく、除去せずに残存させてもよい。金属マスク6を除去しない場合、第2の質量部23上に残存した金属マスク6は光反射部231として用いることができる。
Next, the one surface side of the
Then, after removing the
Here, after etching the
金属膜の成膜方法としては、真空蒸着、スパッタリング(低温スパッタリング)、イオンプレーティング等の乾式メッキ法、電解メッキ、無電解メッキ等の湿式メッキ法、溶射法、金属箔の接合等が挙げられる。なお、以下の各工程における金属膜の成膜においても、同様の方法を用いることができる。
以上の工程により、図10(e)に示すように、各質量部21、22、23および支持部24が一体的に形成された基体2が得られる。
Examples of the method for forming a metal film include vacuum plating, sputtering (low temperature sputtering), dry plating methods such as ion plating, wet plating methods such as electrolytic plating and electroless plating, thermal spraying methods, and joining metal foils. . Note that the same method can also be used for forming a metal film in the following steps.
Through the above steps, as shown in FIG. 10E, the
[A2] 次に、図11(f)に示すように、対向基板3を形成するためのシリコン基板9を用意する。
そして、シリコン基板9の一方の面に、開口部31を形成する領域を除いた部分に対応するように、例えば、アルミニウム等により金属マスクを形成する。
次に、この金属マスクを介して、シリコン基板9の一方の面側をエッチングした後、金属マスクを除去する。これにより、開口部31が形成された対向基板3が得られる。
しかる後に、例えば可動イオンを含むガラスで対向基板3の一方の面に成膜して、図11(g)に示すように、対向基板3上に接合層4を形成する。
[A2] Next, as shown in FIG. 11F, a
Then, a metal mask is formed on one surface of the
Next, after etching one surface side of the
Thereafter, a film is formed on one surface of the
次に、接合層4上に、図11(h)に示すように、電極32を形成する。これにより、接合層4の厚さを調整することで、電極32と第1の質量部21、22との間のギャップを調整することができる。
電極32は、接合層4に金属膜を成膜し、電極32の形状に対応するマスクを介して金属膜をエッチングを行った後、マスクを除去することにより形成することができる。
Next, an
The
次に、図11(i)に示すように、前記工程[A1]で得られた構造体と、前記工程[A2]で接合層4が成膜された対向基板3とを、例えば陽極接合により接合する。
その後、基体2上に、光導波路111、121を形成した後に、発光素子112および受光素子122を取り付けて、アクチュエータ1を得る。
光導波路111、121の形成方法としては、公知の光導波路の形成技術を用いることができる。例えば、クラッド部の構成材料で支持部24上に第1の層を形成し、次いで、その第1の層上にコア部をパターンニングした後に、再度、クラッド部の構成材料でコア部を覆うように第2の層を形成することにより、クラッド部を形成して、光導波路を得ることができる。
以上のようにして、第1実施形態のアクチュエータ1が製造される。
Next, as shown in FIG. 11 (i), the structure obtained in the step [A1] and the
Thereafter, after the
As a method of forming the
As described above, the
<第2実施形態>
次に、本発明のアクチュエータの第2実施形態について説明する。
図12は、本発明のアクチュエータの第2実施形態を示す平面図、図13は、図12に示すアクチュエータに備えられた光学センサを説明するための斜視図、図14は、図12に示すアクチュエータに備えられた光学センサの動作を説明するための図である。
Second Embodiment
Next, a second embodiment of the actuator of the present invention will be described.
12 is a plan view showing a second embodiment of the actuator of the present invention, FIG. 13 is a perspective view for explaining an optical sensor provided in the actuator shown in FIG. 12, and FIG. 14 is an actuator shown in FIG. It is a figure for demonstrating operation | movement of the optical sensor with which it was equipped.
本実施形態にかかるアクチュエータ1Aは、光学センサの構成が異なる以外は、前述した第1実施形態にかかるアクチュエータ1と同様である。
本実施形態にかかるアクチュエータ1Aは、第2の質量部23の側面(図12における右側面)の通過を検知する反射式の光学センサ10Aを備え、この光学センサ10Aによって検知された光の強度に基づき、第2の質量部23の挙動を検知するようになっている。
The actuator 1A according to the present embodiment is the same as the
The actuator 1A according to the present embodiment includes a reflective
より具体的に説明すると、光学センサ10Aは、発光素子112からの光を光導波路111Aを介して第2の質量部23の回動空間に向け照射するとともに、第2の質量部23で反射した前記光を光導波路111Aを介して受光素子122で受光するようになっている。
さらに具体的に説明すると、光導波路111Aは、光伝送経路である線状のコア部113A、123Aと、これらのコア部113A、123Aのそれぞれの外周を覆うクラッド部114Aと有している。
そして、線状のコア部113Aの両端面のうち、一端面115Aは第2の質量部23の回動空間に対向し、他端面116Aは発光素子112に接続されている。これにより、コア部113Aを通じて、発光素子112の光を第2の質量部23の回動空間へ照射することができる。
More specifically, the
More specifically, the
Of both end surfaces of the
線状のコア部123Aの両端面のうち、一端面125Aは第2の質量部23の回動空間に対向し、他端面126Aは受光素子122に接続されている。これにより、コア部123Aを通じて、第2の質量部23で反射した光を受光素子122で受光することができる。
このような光学センサ10Aにおいては、図13および図14(a)に示すように、第2の質量部23が、非駆動状態(ホームポジション)にあるとき、コア部113Aの一端面115Aとコア部123Aの一端面125Aとのそれぞれよりも下方に位置している。
Of both end surfaces of the
In such an
そして、アクチュエータ1Aが駆動状態となると、第2の質量部23が、図14(b)に示すように、一端面115Aから射出した光が第2の質量部23の側面で反射して一端面125Aに一時的に入光した後、図14(c)に示すように、振れ角が最大となる位置へ至る。
その後、第2の質量部23が、図14(d)に示すように、一端面115Aから射出した光が第2の質量部23の側面で再度反射して一端面125Aに一時的に入光した後、図14(e)に示すように、ホームポジションへ至る。
When the actuator 1A is in a driving state, the
Thereafter, as shown in FIG. 14 (d), the light emitted from the one
前述したように第2の質量部23は単振動し、かつ、光学センサ10Aは固定配置されているので、一端面125Aからコア部123Aを通じて受光素子122で受光するタイミングや時間長さを計測に基づいて、第2の質量部23の挙動を検知することができる。
このように、発光素子112(発光部)と受光素子122(受光部)が、ともに前記回動空間に対し一方の側に配設され、これらの対象とする第2の質量部23が所定の回動角となったときのみ、発光素子112からの光が第2の質量部23の側面にて反射して受光素子122で受光される。そして、受光素子122での受光の有無に基づいて、第2の質量部23の挙動を検知する。
以上説明したようなアクチュエータ1Aにあっても、前述した第1実施形態にかかるアクチュエータ1と同様の効果を得ることができる。
As described above, since the
In this way, the light emitting element 112 (light emitting part) and the light receiving element 122 (light receiving part) are both arranged on one side with respect to the rotational space, and the second
Even with the actuator 1A as described above, the same effects as those of the
<第3実施形態>
次に、本発明のアクチュエータの第2実施形態について説明する。
図15は、本発明のアクチュエータの第3実施形態を示す平面図である。
本実施形態にかかるアクチュエータ1Bは、光学センサの検知対象が第1の質量部22である以外は、前述した第2実施形態にかかるアクチュエータ1Aと同様である。
より具体的に説明すると、本実施形態にかかるアクチュエータ1Bは、第1の質量部22の側面(図15における右側面)の通過を検知する反射式の光学センサ10Bを備え、この光学センサ10Bによって検知された光の強度に基づき、第2の質量部23の挙動を検知するようになっている。
<Third Embodiment>
Next, a second embodiment of the actuator of the present invention will be described.
FIG. 15 is a plan view showing a third embodiment of the actuator of the present invention.
The
More specifically, the
光学センサ10Bは、発光素子112からの光を光導波路111Bを介して第1の質量部22の回動空間に向け照射するとともに、第1の質量部22で反射した前記光を光導波路111Bを介して受光素子122で受光するようになっている。
さらに具体的に説明すると、光導波路111Bは、光伝送経路である線状のコア部113B、123Bと、これらのコア部113B、123Bのそれぞれの外周を覆うクラッド部114Bと有している。
The
More specifically, the
そして、コア部113Bを通じて、発光素子112の光を第1の質量部22の回動空間へ照射し、コア部123Bを通じて、第1の質量部22で反射した光を受光素子122で受光する。
前述したように第1の質量部22は第2の質量部23の振動と相関関係をもって単振動し、かつ、光学センサ10Bは固定配置されているので、コア部123Bを通じて受光素子122で受光するタイミングや時間長さを計測に基づいて、第2の質量部23の挙動を検知することができる。
Then, the light of the
As described above, the
このように、発光素子112(発光部)と受光素子122(受光部)が、ともに第1の質量部22の回動空間に対し一方の側に配設され、これらの対象とする第1の質量部22が所定の回動角となったときのみ、発光素子112からの光が第1の質量部22の側面にて反射して受光素子122で受光される。そして、受光素子122での受光の有無に基づいて、第2の質量部23の挙動を検知する。
以上説明したようなアクチュエータ1Aにあっても、前述した第1実施形態にかかるアクチュエータ1と同様の効果を得ることができる。
As described above, the light emitting element 112 (light emitting part) and the light receiving element 122 (light receiving part) are both arranged on one side with respect to the rotation space of the first
Even with the actuator 1A as described above, the same effects as those of the
以上説明したようなアクチュエータは、例えば、レーザープリンタ、バーコードリーダー、走査型共焦点レーザー顕微鏡等の光スキャナ、イメージング用ディスプレイ等に好適に適用することができる。
前述したような第1〜3実施形態のアクチュエータは、2自由度振動系を有するねじり振動子を用いたアクチュエータであるため、マイクロマシン技術を用いて製造することができ、小型化を図ることができる。特に、2自由度振動系を有するねじり振動子は、駆動電圧を低減しつつ、大きな振幅で可動部(第2の質量部23)を駆動することができる。
The actuator as described above can be suitably applied to, for example, a laser printer, a barcode reader, an optical scanner such as a scanning confocal laser microscope, an imaging display, and the like.
Since the actuators of the first to third embodiments as described above are actuators using a torsional vibrator having a two-degree-of-freedom vibration system, they can be manufactured using micromachine technology and can be reduced in size. . In particular, the torsional vibrator having the two-degree-of-freedom vibration system can drive the movable part (second mass part 23) with a large amplitude while reducing the drive voltage.
なお、本発明は2自由度振動系以外の振動系のアクチュエータにも適用することができる。例えば、前述した第1〜3実施形態において、第1の質量部および第1の弾性連結部を省略し、第2の弾性連結部により第2の質量部と支持部とを連結したような形態としてもよい。すなわち、本発明は、1自由度振動系を有するねじり振動子を用いたアクチュエータにも適用することができる。このようなねじり振動子を用いたアクチュエータにあっても、マイクロマシン技術を用いて製造することができるので、小型化を図ることができる。 The present invention can also be applied to an actuator of a vibration system other than the two-degree-of-freedom vibration system. For example, in the first to third embodiments described above, the first mass portion and the first elastic coupling portion are omitted, and the second mass coupling portion and the support portion are coupled by the second elastic coupling portion. It is good. That is, the present invention can also be applied to an actuator using a torsional vibrator having a one-degree-of-freedom vibration system. Even an actuator using such a torsional vibrator can be manufactured by using micromachine technology, and thus can be miniaturized.
以上、本発明のアクチュエータについて、図示の各実施形態に基づいて説明したが、本発明はこれらに限定されるものではない。
また、例えば、本発明のアクチュエータは、第1〜3実施形態の任意の構成同士を互いに組み合わせるようにしてもよい。
また、本発明のアクチュエータでは、各部の構成は、同様の機能を発揮する任意の構成のものに置換することができ、また、任意の構成を付加することもできる。
As mentioned above, although the actuator of this invention was demonstrated based on each embodiment of illustration, this invention is not limited to these.
Further, for example, the actuator of the present invention may be configured by combining arbitrary configurations of the first to third embodiments with each other.
In the actuator of the present invention, the configuration of each part can be replaced with an arbitrary configuration that exhibits the same function, and an arbitrary configuration can be added.
また、前述した実施形態では、静電駆動により第1の質量部21、22を回動させ、これに伴い、第2の質量部23を回動させるもの、すなわち、可動部を駆動する駆動手段として静電駆動を用いたものを説明したが、駆動手段としては、これに限定されず、圧電駆動など他の駆動方式のものを採用することもできる。また、静電駆動を用いた駆動手段としては、前述したような平行平板型以外にも、櫛歯状電極を用いたものなど他の形態であってもよい。
In the above-described embodiment, the first
1、1A、1B……アクチュエータ 2……基体 21、22……第1の質量部 211、221……端部 23……第2の質量部 231……光反射部 232……端部 24……支持部 25……第1の弾性連結部 26……第2の弾性連結部 27……回転中心軸 28……空間 3……対向基板 31……開口部 32……電極 4……接合層 5……シリコン基板 51……凹部 6……金属マスク 7……レジストマスク 9……シリコン基板 10、10A、10B……光学センサ 11、11A……発光部 111、111A、111B……光導波路 112……発光素子 113、113A、113B……コア部 114、114A、114B……クラッド部 115、115A……一端面 116、116A……他端面 12……受光部 121……光導波路 122……受光素子 123、123A……コア部 124……クラッド部 125、125A……一端面 126、126A……他端面 13……通電回路 14……制御回路 141……CPU 142……AD変換回路 143……ROM 144……RAM L1、L2、L3……距離
DESCRIPTION OF
Claims (12)
前記質量部を支持するための支持部と、
前記質量部を前記支持部に対し回動可能とするように、前記質量部と前記支持部とを連結する弾性連結部と、
前記質量部を回動駆動する駆動手段とを有し、
前記駆動手段が前記弾性連結部を捩れ変形させながら前記質量部を回動させるアクチュエータであって、
前記質量部の挙動を検知する挙動検知手段を有し、
前記挙動検知手段は、前記質量部の側面の通過を検知する反射式または透過式の光学センサを備え、該光学センサの検知結果に基づいて、前記質量部の挙動を検知するように構成されていることを特徴とするアクチュエータ。 A plate-like mass part,
A support part for supporting the mass part;
An elastic coupling part that couples the mass part and the support part so that the mass part is rotatable with respect to the support part;
Drive means for rotationally driving the mass part,
An actuator for rotating the mass part while the driving means twists and deforms the elastic connecting part;
Having a behavior detecting means for detecting the behavior of the mass part;
The behavior detection means includes a reflective or transmissive optical sensor that detects passage of a side surface of the mass unit, and is configured to detect the behavior of the mass unit based on a detection result of the optical sensor. An actuator characterized by comprising:
前記第1の質量部を支持するための支持部と、
前記第1の質量部を前記支持部に対し回動可能とするように、前記第1の質量部と前記支持部とを連結する第1の弾性連結部と、
板状をなす第2の質量部と、
前記第2の質量部を前記第1の質量部に対し回動可能とするように、前記第2の質量部と前記第1の質量部とを連結する第2の弾性連結部と、
前記第1の質量部を回動駆動する駆動手段とを有し、
前記駆動手段が前記第1の弾性連結部を捩れ変形させながら前記第1の質量部を回動させ、これに伴い、前記第2の弾性連結部を捩れ変形させながら前記第2の質量部を回動させるアクチュエータであって、
前記第2の質量部の挙動を検知する挙動検知手段を有し、
前記挙動検知手段は、前記第1の質量部または前記第2の質量部の側面の通過を検知する反射式または透過式の光学センサを備え、該光学センサの検知結果に基づいて、前記第2の質量部の挙動を検知するように構成されていることを特徴とするアクチュエータ。 A first mass part;
A support part for supporting the first mass part;
A first elastic connecting portion that connects the first mass portion and the support portion so that the first mass portion is rotatable with respect to the support portion;
A second mass part in the form of a plate;
A second elastic connecting portion for connecting the second mass portion and the first mass portion so that the second mass portion is rotatable with respect to the first mass portion;
Drive means for rotationally driving the first mass part;
The drive means rotates the first mass portion while twisting and deforming the first elastic connecting portion, and accordingly, the second mass portion is deformed while twisting and deforming the second elastic connection portion. An actuator to rotate,
Having a behavior detecting means for detecting the behavior of the second mass part;
The behavior detection unit includes a reflective or transmissive optical sensor that detects passage of a side surface of the first mass unit or the second mass unit, and based on a detection result of the optical sensor, An actuator characterized in that it is configured to detect the behavior of the mass part of the actuator.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006056809A JP2007233192A (en) | 2006-03-02 | 2006-03-02 | Actuator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006056809A JP2007233192A (en) | 2006-03-02 | 2006-03-02 | Actuator |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007233192A true JP2007233192A (en) | 2007-09-13 |
Family
ID=38553825
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006056809A Pending JP2007233192A (en) | 2006-03-02 | 2006-03-02 | Actuator |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007233192A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009134030A (en) * | 2007-11-29 | 2009-06-18 | Seiko Epson Corp | Actuator, optical scanner and image forming apparatus |
| JP2015196381A (en) * | 2014-03-31 | 2015-11-09 | ゼロックス コーポレイションXerox Corporation | System for detecting inkjet inoperative within printing head discharging transparent ink by using heat-sensitive substrate |
-
2006
- 2006-03-02 JP JP2006056809A patent/JP2007233192A/en active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009134030A (en) * | 2007-11-29 | 2009-06-18 | Seiko Epson Corp | Actuator, optical scanner and image forming apparatus |
| JP2015196381A (en) * | 2014-03-31 | 2015-11-09 | ゼロックス コーポレイションXerox Corporation | System for detecting inkjet inoperative within printing head discharging transparent ink by using heat-sensitive substrate |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6733709B2 (en) | MEMS reflector system | |
| US7605966B2 (en) | Optical deflector | |
| JP4092283B2 (en) | Two-dimensional optical scanner and optical device | |
| JP6447683B2 (en) | Scanning microelectromechanical reflector system, light detection and ranging (LIDAR) device, and method of operating scanning microelectromechanical reflector system | |
| WO2013136759A1 (en) | Optical reflecting element and actuator | |
| JP5400636B2 (en) | Optical deflector and optical apparatus using the same | |
| US6975442B2 (en) | Resonance scanner | |
| WO2009096182A1 (en) | Optical reflection element | |
| JP2006167859A (en) | Actuator | |
| JP5718075B2 (en) | Optical deflection module | |
| JP5539628B2 (en) | Micromirror device for optical scanning, optical scanning device, image forming apparatus, display device, and input device | |
| JP2008070863A (en) | Vibrating mirror, light writing device, and image forming apparatus | |
| KR100939499B1 (en) | Oscillating device, light deflector, and image forming apparatus using the light deflector | |
| JP2007233192A (en) | Actuator | |
| WO2023053840A1 (en) | Optical scanning device | |
| JP4973064B2 (en) | Actuator, projector, optical device, optical scanner, and image forming apparatus | |
| JP2007295731A (en) | Actuator | |
| JP2003005124A (en) | Optical deflector equipped with displacement detecting function for movable plate, and optical equipment using optical deflector | |
| JP5353761B2 (en) | Manufacturing method of optical deflector | |
| JP2005279863A (en) | Manufacturing method of actuator and actuator | |
| JP2009031643A (en) | Rocking body device, light deflector and image forming apparatus using it | |
| JP2006081320A (en) | Actuator | |
| JP2006075944A (en) | Actuator | |
| JP2008003330A (en) | Actuator | |
| JP2008068369A (en) | Actuator, optical scanner, and image formation device |