JP2004168304A - Vehicular travel guiding device - Google Patents
Vehicular travel guiding device Download PDFInfo
- Publication number
- JP2004168304A JP2004168304A JP2003420060A JP2003420060A JP2004168304A JP 2004168304 A JP2004168304 A JP 2004168304A JP 2003420060 A JP2003420060 A JP 2003420060A JP 2003420060 A JP2003420060 A JP 2003420060A JP 2004168304 A JP2004168304 A JP 2004168304A
- Authority
- JP
- Japan
- Prior art keywords
- distance
- vehicle
- image
- data
- dimensional
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






































Landscapes
- Traffic Control Systems (AREA)
Abstract
Description
本発明は、峡路通過時の運転者の負担を軽減し、安全を確保する車輌用走行案内装置に関する。 The present invention relates to a vehicle travel guide device that reduces the burden on a driver when passing through a gorge and ensures safety.
従来、自動車等の車輌においては、塀、ガードレール、電柱、駐車車輌等が多数存在する狭路を通過する際の運転者の感覚を補うものとして、例えば、実開平5−68742号公報に開示されているようなコーナーポールや、棒状の部材が障害物に触れるとスイッチがオンする接触式スイッチからなる触覚センサ等を車体に取り付ける場合があり、これにより、車幅や左右障害物との間の隙間を確認することができる。 2. Description of the Related Art Conventionally, in vehicles such as automobiles, Japanese Unexamined Utility Model Publication No. 5-68742 discloses a vehicle that supplements a driver's feeling when passing through a narrow road where many walls, guardrails, electric poles, and parked vehicles exist. Corner poles, tactile sensors consisting of contact switches that turn on when a bar-shaped member touches an obstacle, etc. The gap can be confirmed.
また、最近では、車輌の側面や四隅に超音波センサを取り付け、超音波を発射して障害物からの反射波を受信することにより距離を計測し、計測した距離を運転者に知らせて狭路を通過する際の負担を軽減しようとする技術が開発されている。
しかしながら、前述のコーナーポールのように車体外部に目印となるようなものを取り付ける場合には、運転者の慣れを必要とするため、運転者の負担軽減効果が少ない。また、触覚センサのような接触式のものでは、物体に接触するまで位置の確認ができず、障害物に接触してからではハンドル操作が間に合わないといった事態が生じる。 However, in the case where a mark that is a mark like the above-described corner pole is attached to the outside of the vehicle body, the driver's familiarity is required, and the effect of reducing the burden on the driver is small. Further, in the case of a contact type sensor such as a tactile sensor, the position cannot be confirmed until the contact with an object occurs, and a situation arises in which the steering wheel cannot be operated in time after the contact with an obstacle.
さらに、超音波を用いる技術では、空間分解能が劣るため障害物の位置関係を知ることができないばかりでなく、歩行者の衣服や滑らかな壁等からは発射した超音波が戻ってこないという物体依存性があり、道路上に存在する様々な立体物に対処することは困難である。 Furthermore, in the technology using ultrasonic waves, the spatial resolution is poor, so that not only can the positional relationship of obstacles not be known, but also object-dependent that the ultrasonic waves emitted from pedestrians' clothes or smooth walls do not return. It is difficult to deal with various three-dimensional objects existing on the road.
本発明は上記事情に鑑みてなされたもので、車輌が狭路を通過する前に進行方向に存在する様々な立体物を確実に検出し、検出した立体物と自車輌との間の隙間を運転者に知らせることにより、運転者の負担を軽減して安全を確保することのできる車輌用走行案内装置を提供することを目的とする。 The present invention has been made in view of the above circumstances, and reliably detects various three-dimensional objects existing in the traveling direction before the vehicle passes through a narrow road, and detects a gap between the detected three-dimensional object and the own vehicle. An object of the present invention is to provide a traveling guide device for a vehicle that can reduce a burden on a driver and ensure safety by notifying the driver.
上記目的を達成するため、本発明による車輌用走行案内装置は、車外の撮像画像に基づいて立体物を検出する立体物検出手段と、前記立体物検出手段で検出した立体物との隙間距離を算出する隙間距離算出手段と、前記隙間距離算出手段で算出した隙間距離に係わる情報を表示するディスプレイ装置とを備えたことを特徴とする。 In order to achieve the above object, a traveling guide device for a vehicle according to the present invention includes a three-dimensional object detection unit that detects a three-dimensional object based on a captured image outside the vehicle, and a gap distance between the three-dimensional object detected by the three-dimensional object detection unit. It is characterized by comprising: a gap distance calculating means for calculating; and a display device for displaying information relating to the gap distance calculated by the gap distance calculating means.
本発明の車輌用走行案内装置は、車輌が狭路を通過する前に進行方向に存在する様々な立体物を確実に検出して自車輌との隙間距離を運転者に知らせることができ、運転者の負担を軽減して安全を確保することができる等優れた効果が得られる。 The vehicle travel guide device of the present invention can reliably detect various three-dimensional objects existing in the traveling direction before the vehicle passes through a narrow road and inform the driver of a gap distance between the vehicle and the vehicle. Excellent effects are obtained, such as safety can be ensured by reducing the burden on the user.
以下、図面を参照して本発明の実施の形態を説明する。図面は本発明の一実施例に係り、図1は走行案内装置の全体構成図、図2は走行案内装置の回路ブロック図、図3はディスプレイの画面を示す説明図、図4は車輌の正面図、図5はカメラと被写体との関係を示す説明図、図6はイメージプロセッサの詳細回路図、図7はシティブロック距離計算回路の説明図、図8は最小値検出回路のブロック図、図9は車載のCCDカメラで撮像した画像の例を示す説明図、図10は距離画像の例を示す説明図、図11は車輌の上面図、図12は車輌の側面図、図13は距離画像処理用コンピュータの機能ブロック図、図14は画像の区分方法を示す説明図、図15は検出物体とヒストグラムの関係を示す説明図、図16は物体の存在領域の検出結果と検出距離の例を示す説明図、図17は物体検出用の3次元ウインドウの形状を示す説明図、図18は物体検出用の2次元ウインドウの形状を示す説明図、図19は物体の輪郭を構成するデータの例を示す説明図、図20は物体の輪郭像と検出された外形寸法の例を示す説明図、図21は側壁検出における探索領域の形状を示す説明図、図22は画像上の側壁探索領域を示す説明図、図23は立体物データの分布状況を示す説明図、図24はハフ変換での直線の想定を示す説明図、図25はパラメータ空間の投票領域を示す説明図、図26は側壁候補領域を示す説明図、図27はヒストグラムと側壁の存在範囲の関係を示す説明図、図28は側壁の検出結果を示す説明図、図29は隙間距離算出の説明図、図30はイメージプロセッサの動作を示すフローチャート、図31はシフトレジスタ内の保存順序を示す説明図、図32はシティブロック距離計算回路の動作を示すタイミングチャート、図33はずれ量決定部の動作を示すタイミングチャート、図34はイメージプロセッサの全体の動作を示すタイミングチャート、図35及び図36は物体検出処理のフローチャート、図37及び図38は側壁検出処理のフローチャート、図39は隙間距離算出処理のフローチャートである。
Hereinafter, embodiments of the present invention will be described with reference to the drawings. 1 is an overall configuration diagram of a travel guide device, FIG. 2 is a circuit block diagram of the travel guide device, FIG. 3 is an explanatory diagram showing a screen of a display, and FIG. 4 is a front view of a vehicle. FIG. 5, FIG. 5 is an explanatory diagram showing the relationship between the camera and the subject, FIG. 6 is a detailed circuit diagram of an image processor, FIG. 7 is an explanatory diagram of a city block distance calculation circuit, and FIG. 8 is a block diagram of a minimum value detection circuit. 9 is an explanatory view showing an example of an image captured by a vehicle-mounted CCD camera, FIG. 10 is an explanatory view showing an example of a distance image, FIG. 11 is a top view of the vehicle, FIG. 12 is a side view of the vehicle, and FIG. FIG. 14 is an explanatory diagram showing a method of dividing an image, FIG. 15 is an explanatory diagram showing a relationship between a detected object and a histogram, and FIG. 16 is an example of a detection result and a detection distance of an existing region of the object. FIG. 17 is an explanatory view showing an
図1において、符号1は自動車等の車輌であり、この車輌1に、運転者に対する高度な支援制御を行なうアクティブドライブアシスト(ADA)システムの一機能を担う走行案内装置2が搭載されており、塀、ガードレール、電柱、駐車車輌等が存在する狭路を通過する際の運転者の負担を軽減し、安全を確保するようになっている。
In FIG. 1,
前記走行案内装置2は、車外の対象を撮像する撮像系としての左右1組のカメラからなるステレオ光学系10と、このステレオ光学系10によって撮像した左右1組のステレオ画像対を処理して画像全体に渡る3次元の距離分布を算出するステレオ画像処理手段15と、このステレオ画像処理手段15からの距離分布情報を入力し、その距離分布情報から、塀、ガードレール等の道路の境界となる連続した立体物としての側壁や、他の車輌、歩行者、建築物等の道路上の立体物の3次元位置を高速で検出する立体物検出手段100と、この立体物検出手段100で検出した前方の側壁や立体物の縁と自車輌1側部の延長線との間の左右の最近接距離を隙間距離として算出する隙間距離算出手段110と、この隙間距離算出手段110で算出した左右の隙間距離に係わる情報を運転者に知らせる報知手段115とを備えている。
The
図2は前記走行案内装置2のハードウエア構成を示す回路ブロック図であり、前記ステレオ光学系10を、例えば電荷結合素子(CCD)等の固体撮像素子を用いたCCDカメラを用い、後述するように、近距離用としての左右1組のCCDカメラ11a,11b、及び、遠距離用としての左右1組のCCDカメラ12a,12bにより構成し、このステレオ光学系10に前記ステレオ画像処理手段15としての機能を実現するイメージプロセッサ20が接続されている。
FIG. 2 is a circuit block diagram showing a hardware configuration of the
さらに、前記イメージプロセッサ20に、前記立体物検出手段100及び前記隙間距離算出手段110としての機能を実現するための距離画像処理用コンピュータ120が接続され、この距離画像処理用コンピュータ120に前記報知手段115としてのディスプレイ3が接続されている。
Further, a distance
前記イメージプロセッサ20は、前記ステレオ光学系10で撮像した2枚のステレオ画像対に対して微小領域毎に同一の物体が写っている部分を探索し、対応する位置のずれ量を求めて物体までの距離を算出する距離検出回路20aと、この距離検出回路20aの出力である距離情報を記憶する距離画像メモリ20bとから構成されている。
The
また、前記距離画像処理用コンピュータ120は、主として個々の物体を検出する処理を行なうためのマイクロプロセッサ120a、主として側壁を検出する処理を行なうためのマイクロプロセッサ120b、主として隙間距離を算出する処理を行なうためのマイクロプロセッサ120cがシステムバス121を介して並列に接続されたマルチマイクロプロセッサのシステム構成となっている。
Further, the range
そして、前記システムバス121には、前記距離画像メモリ20bに接続されるインターフェース回路122と、制御プログラムを格納するROM123と、計算処理途中の各種パラメータを記憶するRAM124と、処理結果のパラメータを記憶する出力用メモリ125と、ディスプレイ(DISP)3を制御するためのディスプレイコントローラ(DISP.CONT.)126と、車速センサ4、ステアリングの操舵角を検出する舵角センサ5、運転者に対するADAの支援モードを選択するためのモード設定スイッチ6等の車輌1に備えられたセンサ・スイッチ類からの信号を入力するインターフェース回路127とが接続されている。
The
前記距離画像処理用コンピュータ120においては、各マイクロプロセッサ120a,120b,120cが使用するメモリの領域が分けられており、前記イメージプロセッサ20からの距離情報に基づいて物体検出処理と側壁検出処理とを並列に実行し、運転者によって前記モード設定スイッチ6が操作されて規定の信号が入力されると、検出した立体物のデータから隙間距離算出処理を行なってディスプレイ3に表示する。
In the distance
図3に示すように、前記ディスプレイ3の画面には、車輌前方の風景を、後述する距離画像の状態で表示するモニタ部3aが中央部に設けられており、このモニタ部3aの側部に、ADAの各モード(クルーズ、ガイド、アシスト、チェック)を表示するモード表示部3bが設けられ、前記モード設定スイッチ6の操作入力に応じて前記モニタ部3aの該当する表示が点灯するようになっている。
As shown in FIG. 3, on the screen of the
また、前記モニタ部3aの上部には、データ表示部3cと、楕円を4分割した形状で車輌の前後左右を表わす位置表示部3dとが設けられ、前記モニタ部3a下部には、ADAの各モードに応じて、車間距離、速度、左隙間距離、右隙間距離等の文字とともに、算出した数値を表示するモードデータ表示部3eが設けられている。
Above the monitor 3a, a data display 3c and a
本発明においては、多数の立体物が存在する狭路を通過しなければならないような状況になったとき、運転者が前記モード設定スイッチ6を操作してガイドモードを選択すると、前記モード表示部3bの”ガイド”の表示部分が点灯し、前記ステレオ光学系10で撮像したステレオ画像対を処理した距離画像に基づいて、側壁、電柱、駐車車輌等の道路周辺の立体物の縁と自車輌1側部の延長線との間の左右の距離が算出され、その最小値が最近接距離すなわち隙間距離として求められるようになっている。
In the present invention, when the driver operates the
そして、図3に示すように、モードデータ表示部3eの左隙間距離、右隙間距離の文字の下に、隙間距離の数値が表示され、前記位置表示部3dの左右部分が点灯する。この位置表示部3dは、算出した隙間距離が0以下の場合には、そのまま進行すると接触することを警告するため、該当する側が赤色で点灯され、隙間距離が0よりも大きく20cm程度以下の場合には、運転者の不用意なハンドル操作によって接触が起こる危険性があるので該当する側が黄色で点灯され、隙間距離が20cm程度よりも大きい場合は、そのまま進行しても接触のおそれが十分に少ないことを示すため、該当する側が緑色で点灯される。
Then, as shown in FIG. 3, a numerical value of the gap distance is displayed below the characters of the left gap distance and the right gap distance of the mode data display section 3e, and the left and right portions of the
すなわち、側壁、電柱、駐車車輌等が存在する狭路を通過する前にモード設定スイッチ6を操作することにより、運転者はディスプレイ3の画面で安全に通過できるか否かを確認することができ、運転者の負担を軽減して接触事故等を未然に回避することができるのである。さらには、隙間距離を運転者が定量的に把握できるため、車輌位置感覚の学習が容易となり、安全運転の促進を図ることができる。
That is, by operating the
尚、簡易的には、前記ディスプレイ3に代えて、例えば隙間距離の値に応じて点灯部分が変化するバーグラフ等による表示器を採用しても良く、また、隙間距離に係わる情報を運転者に知らせる報知手段115として、視覚的な表示に代えて、音、音声等によるものを採用しても良い。
In addition, for simplicity, instead of the
以下、イメージプロセッサ20による画像処理に係わる機能、距離画像処理用コンピュータ120による立体物検出に係わる機能、及び、モード設定スイッチ6によりガイドモードが選択された場合の隙間距離算出に係わる機能について説明する。尚、画像処理用コンピュータ120における隙間距離算出は、検出した立体物が自車輌1の進行方向に障害物として立ちふさがっていない場合に実行される。
Hereinafter, a function related to image processing by the
前記ステレオ光学系10を構成する左右1組のカメラは、図4に示すように、近距離の左右画像用としての2台のCCDカメラ11a,11b(代表してCCDカメラ11と表記する場合もある)が、それぞれ車室内の天井前方に一定の間隔をもって取り付けられるとともに、遠距離の左右画像用としての2台のCCDカメラ12a,12b(代表してCCDカメラ12と表記する場合もある)が、それぞれ、近距離用のCCDカメラ11a,11bの外側に一定の間隔をもって取り付けられている。
As shown in FIG. 4, one set of left and right cameras constituting the stereo
前記ステレオ光学系10として、直近から例えば100m遠方までの距離計測を行なう場合、車室内のCCDカメラ11、12の取付位置を、例えば、車輌1のボンネット先端から2mとすると、実際には前方2mから100mまでの位置を計測できれば良い。
When the stereo
そこで、近距離用のCCDカメラ11a,11bでは、前方2mから20mまでの位置を計測し、遠距離用のCCDカメラ12a,12bでは、前方10mから100mまでの位置を計測すれば、近距離用CCDカメラ11と遠距離用CCDカメラ12とで前方10mから20mの間にオーバーラップを有して信頼性を確保しつつ、全ての範囲を計測することができる。
Therefore, the short-
以下に、イメージプロセッサ20による距離の算出方法を、近距離用CCDカメラ11を例に説明するが、遠距離用CCDカメラ12に対しても同様の処理により距離の算出が行われる。尚、本実施例による走行案内装置2では、直前の立体物を検出する為に、近距離用CCDカメラ11を用いる。
In the following, a method of calculating the distance by the
すなわち、図5に示すように、近距離用の2台のCCDカメラ11a、11bの取付間隔をrとして、2台のカメラ11a,11bの設置面から距離Dにある点Pを撮影する場合、2台のカメラ11a,11bの焦点距離を共にfとすると、点Pの像は、それぞれのカメラについて焦点位置からfだけ離れた投影面に写る。
That is, as shown in FIG. 5, when the mounting interval between the two short-
このとき、右のCCDカメラ11bにおける像の位置から左のCCDカメラ11aにおける像の位置までの距離は、r+xとなり、このxをずれ量とすると、点Pまでの距離Dは、ずれ量xから以下の式で求めることができる。
D=r×f/x (1)
At this time, the distance from the position of the image on the
D = r × f / x (1)
この左右画像のずれ量xは、エッジ、線分、特殊な形等、何らかの特徴を抽出し、それらの特徴が一致する部分を見つけ出すことによっても検出できるが、情報量の低下を避けるため、前記イメージプロセッサ20では、左右画像における同一物体の像を見つけ出す際に画像を小領域に分割し、それぞれの小領域内の輝度あるいは色のパターンを左右画像で比較して対応する領域を見つけ出すことにより、小領域毎の距離分布を全画面に渡って求める。
The shift amount x between the left and right images can be detected by extracting some feature such as an edge, a line segment, or a special shape, and finding out a portion where those features match, but in order to avoid a decrease in the amount of information, In the
左右画像の一致度の評価すなわちステレオマッチングは、右画像、左画像のi番目画素の輝度(色を用いても良い)を、それぞれ、Ai、Biとすると、例えば、以下の(2)式に示すシティブロック距離Hによって行なうことができ、左右画像の各小領域間のシティブロック距離Hの最小値が所定の条件を満たすとき、互いの小領域が対応すると判断することができる。
H=Σ|Ai−Bi| (2)
The evaluation of the degree of coincidence of the left and right images, that is, stereo matching, is as follows, assuming that the luminances (colors may be used) of the i-th pixel of the right image and the left image are Ai and Bi, respectively. When the minimum value of the city block distance H between the small regions of the left and right images satisfies a predetermined condition, it can be determined that the small regions correspond to each other.
H = Σ | Ai−Bi | (2)
このシティブロック距離Hによるステレオマッチングでは、平均値を減算することによる情報量の低下もなく、乗算がないことから演算速度を向上させることができるが、分割すべき小領域の大きさが大き過ぎると、その領域内に遠方物体と近くの物体が混在する可能性が高くなり、検出される距離が曖昧になる。従って、画像の距離分布を得るためにも領域は小さい方が良いが、小さ過ぎると逆に一致度を調べるための情報量が不足する。このため、例えば、100m先にある幅1.7mの車輌が、隣の車線の車輌と同じ領域内に含まれないように、4つに分割される画素数を領域横幅の最大値とすると、前記ステレオ光学系10に対して4画素となる。この値を基準に最適な画素数を実際の画像で試行した結果、縦横共に4画素となる。
In the stereo matching based on the city block distance H, the amount of information is not reduced by subtracting the average value, and the calculation speed can be improved because there is no multiplication. However, the size of the small region to be divided is too large. Then, the possibility that a distant object and a nearby object are mixed in the area increases, and the detected distance becomes ambiguous. Therefore, it is better that the area is small in order to obtain the distance distribution of the image. However, if the area is too small, the amount of information for checking the degree of coincidence is insufficient. Therefore, for example, if the number of pixels divided into four is set to the maximum value of the area width so that a vehicle having a width of 1.7 m 100 m ahead is not included in the same area as a vehicle in an adjacent lane, There are four pixels for the stereo
以下の説明では、画像を4×4の小領域で分割して左右画像の一致度を調べるものとし、ステレオ光学系10は、近距離用のCCDカメラ11a,11bで代表するものとする。
In the following description, it is assumed that the image is divided into 4 × 4 small areas to check the degree of coincidence between the left and right images, and that the stereo
前記イメージプロセッサ20の回路詳細は、図6に示され、この回路では、距離検出回路20aに、前記ステレオ光学系10で撮像したアナログ画像をデジタル画像に変換する画像変換部30、この画像変換部30からの画像データに対し、左右画像のずれ量xを決定するためのシティブロック距離Hを画素を一つずつずらしながら次々と計算するシティブロック距離計算部40、シティブロック距離Hの最小値HMIN及び最大値HMAXを検出する最小・最大値検出部50、この最小・最大値検出部50で得られた最小値HMINが左右小領域の一致を示すものであるか否かをチェックしてずれ量xを決定するずれ量決定部60が備えられており、また、距離画像メモリ20bとしてデュアルポートメモリ90が採用されている。
The circuit details of the
前記画像変換部30では、左右画像用のCCDカメラ11a,11bに対応してA/Dコンバータ31a,31bが備えられ、各A/Dコンバータ31a,31bに、データテーブルとしてのルックアップテーブル(LUT)32a,32b、前記CCDカメラ11a,11bで撮像した画像を記憶する画像メモリ33a,33bが、それぞれ接続されている。尚、前記画像メモリ33a,33bは、後述するように、シティブロック距離計算部40で画像の一部を繰り返し取り出して処理するため、比較的低速のメモリから構成することができ、コスト低減を図ることができる。
The
各A/Dコンバータ31a,31bは、例えば8ビットの分解能を有し、左右のCCDカメラ11a,11bからのアナログ画像を、所定の輝度階調を有するデジタル画像に変換する。すなわち、処理の高速化のため画像の二値化を行なうと、左右画像の一致度を計算するための情報が著しく失われるため、例えば256階調のグレースケールに変換するのである。
Each of the A /
また、LUT32a,32bはROM上に構成され、前記A/Dコンバータ31a,31bでデジタル量に変換された画像に対し、低輝度部分のコントラストを上げたり、左右のCCDカメラ11a,11bの特性の違いを補正する。そして、LUT32a,32bで変換された信号は、一旦、画像メモリ33a,33bに記憶される。
The
前記シティブロック距離計算部40では、前記画像変換部30の左画像用の画像メモリ33aに、共通バス80を介して2組の入力バッファメモリ41a,41bが接続されるとともに、右画像用の画像メモリ33bに、共通バス80を介して2組の入力バッファメモリ42a,42bが接続されている。
In the city block distance calculator 40, two sets of
前記左画像用の各入力バッファメモリ41a,41bには、2組の例えば8段構成のシフトレジスタ43a,43bが接続され、右画像用の各入力バッファメモリ42a,42bには、同様に、2組の例えば8段構成のシフトレジスタ44a,44bが接続されている。さらに、これら4組のシフトレジスタ43a,43b,44a,44bには、シティブロック距離を計算するシティブロック距離計算回路45が接続されている。
Two sets of, for example, eight-
また、前記右画像用のシフトレジスタ44a、44bには、後述するずれ量決定部60の2組の10段構成のシフトレジスタ64a,64bが接続されており、次の小領域のデータ転送が始まると、シティブロック距離Hの計算の終わった古いデータはこれらのシフトレジスタ64a,64bに送られ、ずれ量xの決定の際に用いられる。
The shift registers 44a and 44b for the right image are connected to two sets of ten-
また、シティブロック距離計算回路45は、加減算器に入出力ラッチをつなげてワンチップ化した高速CMOS型演算器46を組み合わせており、図7に詳細が示されるように、演算器46を16個ピラミッド状に接続したパイプライン構造で、例えば8画素分を同時に入力して計算するようになっている。このピラミッド型構造の初段は、絶対値演算器、2段〜4段は、それぞれ、第1加算器、第2加算器、第3加算器を構成し、最終段は総和加算器となっている。尚、図7においては、絶対値計算と1,2段目の加算器は半分のみ表示している。
Further, the city block
また、前記各入力バッファメモリ41a,41b,42a,42bは、シティブロック距離計算の速度に応じた比較的小容量の高速タイプであり、入出力が分離し、クロック発生回路85から供給されるクロックに従って、#1アドレスコントローラ86によって発生されるアドレスが共通に与えられる。また、4組のシフトレジスタ43a,43b,44a,44bとの転送は、#2アドレスコントローラ87によって制御される。
Each of the
前記最小・最大値検出部50は、シティブロック距離Hの最小値HMINを検出する最小値検出回路51とシティブロック距離Hの最大値HMAXを検出する最大値検出回路52とを備えており、前記シティブロック距離計算回路45と同様の高速CMOS型演算器を最小値、最大値検出用として2個使用した構成となっており、シティブロック距離Hの出力と同期が取られるようになっている。
The minimum / maximum value detection unit 50 includes a minimum
図8に示すように、最小値検出回路51は、具体的には、Aレジスタ46a、Bレジスタ46b、及び、算術論理演算ユニット(ALU)46cからなる演算器46に、Cラッチ53,ラッチ54,Dラッチ55を接続して構成され、シティブロック距離計算回路45からの出力が、Aレジスタ46aと、Cラッチ53を介してBレジスタ46bとに入力され、ALU46の出力の最上位ビット(MSB)がラッチ54に出力される。このラッチ54の出力は、Bレジスタ46b及びDラッチ55に出力され、演算器46での最小値計算の途中の値が、Bレジスタ46bに保存されるとともに、そのときのずれ量δがDラッチ55に保存されるようになっている。尚、最大値検出回路52については、論理が逆になることと、ずれ量δを保存しないこと以外は、最小値検出回路51と同様の構成である。
As shown in FIG. 8, specifically, the minimum
前述したようにシティブロック距離Hは、一つの右画像小領域に対し、左画像小領域を1画素ずつずらしながら順次計算されていく。そこで、シティブロック距離Hの値が出力される毎に、これまでの値の最大値HMAX、最小値HMINと比較、更新することによって、最後のシティブロック距離Hの出力とほぼ同時に、その小領域におけるシティブロック距離Hの最大値HMAX、最小値HMINが求まるようになっている。 As described above, the city block distance H is sequentially calculated while shifting the left image small area by one pixel with respect to one right image small area. Therefore, each time the value of the city block distance H is output, it is compared with the maximum value HMAX and the minimum value HMIN of the previous values and updated, so that the small area is almost simultaneously output with the output of the last city block distance H. , The maximum value HMAX and the minimum value HMIN of the city block distance H are determined.
前記ずれ量決定部60は、比較的小規模のRISCプロセッサとして構成され、演算器61を中心として、2本の16ビット幅データバス62a,62b、ずれ量xを保持するラッチ63a、第1の規定値としてのしきい値HAを保持するラッチ63b、第2の規定値としてのしきい値HBを保持するラッチ63c、第3の規定値としてのしきい値HCを保持するラッチ63d、右画像の輝度データを保持する2組のシフトレジスタ64a,64b、演算器61の出力を受けてずれ量xまたは”0”を出力するスイッチ回路65、そして出力された結果を一時保存する出力バッファメモリ66a,66b、回路の動作タイミングや演算器61の機能の制御プログラムが書き込まれた16ビット幅のROM67が備えられている。
The shift amount determination unit 60 is configured as a relatively small-scale RISC processor, and has a computing unit 61 as a center, two 16-bit data buses 62a and 62b, a
前記演算器61は、ALU70を中心として、Aレジスタ71、Bレジスタ72、Fレジスタ73、及び、セレクタ74からなり、前記データバス62a(以下、Aバス62aとする)にAレジスタ71が接続されるとともに、前記データバス62b(以下、Bバス62bとする)にBレジスタ72が接続され、ALU70の演算結果で前記スイッチ回路65を作動し、ずれ量xまたは“0”が前記出力バッファメモリ66a,66bに格納されるようになっている。
The arithmetic unit 61 includes an A register 71, a B register 72, an F register 73, and a
前記Aバス62aには、各しきい値HA、HB、HCを保持するラッチ63b,63c,63d、前記最大値検出回路52が接続され、前記Bバス62bには、前記最小値検出回路51が接続されている。さらに、前記Aバス62a及びBバス62bには、前記各シフトレジスタ64a,64bが接続されている。
The A bus 62a is connected to latches 63b, 63c, 63d holding the threshold values HA, HB, HC, and the maximum
また、前記スイッチ回路65には、前記演算器61が接続されるとともに、前記ラッチ63aを介して前記最小値検出回路51が接続され、後述する3つのチェック条件が演算器61で判定され、その判定結果に応じて前記出力バッファメモリ66a,66bへの出力が切り換えられる。
The arithmetic unit 61 is connected to the
このずれ量決定部60では、得られたシティブロック距離Hの最小値HMINが本当に左右小領域の一致を示しているものかどうかチェックを行い、条件を満たしたもののみ、出力バッファメモリ66a,66bの対応する画素の位置にずれ量xを出力する。 The shift amount determining unit 60 checks whether or not the obtained minimum value HMIN of the city block distance H really indicates the coincidence of the left and right small areas, and only the output buffer memories 66a and 66b which satisfy the condition are satisfied. Is output to the position of the pixel corresponding to.
すなわち、シティブロック距離Hが最小となるずれ量が求めるずれ量xとなる訳であるが、以下の3つのチェック条件を満足した場合にずれ量xを出力し、満足しない場合には、データを採用せずに“0”を出力する。
(1)HMIN≦HA(HMIN>HAのときには距離を検出できず。)
(2)HMAX −HMIN ≧HB (得られた最小値HMINがノイズによる揺らぎより明らかに低くなっていることをチェックするための条件であり、最小値HMIN の近傍の値との差でなく、最大値HMAX との差をチェック対象とすることにより、曲面等の緩やかに輝度の変わる物体に対しても距離検出が行なえる。)
(3)右画像の小領域内の横方向の隣接画素間の輝度差>HC (しきい値HC を大きくするとエッジ検出となるが、輝度が緩やかに変化している場合にも対応可能なように、しきい値HC は通常のエッジ検出レベルよりはずっと低くしてある。この条件は、輝度変化のない部分では、距離検出が行なえないという基本的な原理に基づいており、小領域中の画素毎に行なわれるため、小領域の中でも実際に距離の検出された画素のみが採用されることになり、自然な結果が得られる。)
このずれ量決定部60から出力される最終結果である距離分布情報は、距離画像メモリ20bとしてのデュアルポートメモリ90へ共通バス80を介して書き込まれる。
That is, the displacement amount that minimizes the city block distance H is the displacement amount x to be obtained. If the following three check conditions are satisfied, the displacement amount x is output. "0" is output without adoption.
(1) HMIN ≦ HA (When HMIN> HA, the distance cannot be detected.)
(2) HMAX−HMIN ≧ HB (This is a condition for checking that the obtained minimum value HMIN is clearly lower than the fluctuation due to noise, and is not a difference from a value near the minimum value HMIN but a maximum value. By using the difference from the value HMAX as a check target, distance detection can be performed even on an object such as a curved surface whose luminance gradually changes.)
(3) Luminance difference between adjacent pixels in the horizontal direction in the small region of the right image> HC (If the threshold value HC is increased, edge detection is performed, but it is possible to cope with a case where the luminance changes slowly. In addition, the threshold value HC is much lower than the normal edge detection level, which is based on the basic principle that distance detection cannot be performed in a portion where there is no change in luminance. Since the process is performed for each pixel, only the pixels for which the distance is actually detected are used in the small area, and a natural result is obtained.)
The distance distribution information as the final result output from the shift amount determination unit 60 is written via a common bus 80 to a
以上のイメージプロセッサ20から出力される距離分布情報は、画像のような形態をしており(距離画像)、CCDカメラ11で撮影した画像、例えば図9に示すように、駐車車輌200,300やガードレール400等の立体物を撮像した画像(図9は片方のカメラで撮像した画像を示す)を前記イメージプロセッサ20で処理すると、図10のような画像となる。
The distance distribution information output from the
図10に示す距離画像の例では、画像サイズは横400画素×縦200画素であり、距離データを持っているのは黒点の部分で、これは図9の画像の各画素のうち、左右方向に隣合う画素間で明暗変化が大きい部分である。画像上の座標系は、図10に示すように、左上隅を原点として横方向をi座標軸,縦方向をj座標軸とし、単位は画素である。 In the example of the distance image shown in FIG. 10, the image size is 400 pixels horizontally × 200 pixels vertically, and the portion having the distance data is a black dot portion, which is one of the pixels in the image shown in FIG. This is a portion where the brightness change is large between adjacent pixels. As shown in FIG. 10, the coordinate system on the image has an origin at the upper left corner, an i coordinate axis in the horizontal direction, a j coordinate axis in the vertical direction, and a unit of pixel.
この距離画像は、距離画像処理用コンピュータ120に読み込まれ、前方に存在する他の車輌や障害物等の複数の物体が検出され、その位置と大きさが算出され、検出した物体の輪郭像が抽出される。さらには、位置の時間変化による自車との相対速度等も算出することができる。
This distance image is read by the distance
この場合、前記距離画像処理用コンピュータ120では、物体の3次元的な位置情報を利用し、道路と物体の区別は道路表面からの高さによって行い、物体と背景の区別は距離の値によって行なう。そのため、前記距離画像処理用コンピュータ120では、まず、前記イメージプロセッサ20からの距離画像の座標系を、自車(車輌1)を取り巻く実空間の座標系に変換し、検出した立体物に対し、位置や大きさを計算する。
In this case, the distance
すなわち、図11及び図12に示すように、実空間の座標系を車輌1固定の座標系とし、X軸を車輌1の右側側方、Y軸を車輌1の上方、Z軸を車輌1の前方、原点を2台のCCDカメラ11a(12b),11b(12b)の中央の真下の道路面とすると、XZ平面(Y=0)は、道路が平坦な場合、道路面と一致することになり、画像中の距離情報(i,j,Z)から被写体の3次元位置(X,Y,Z)を算出するには、以下の(3),(4)式により一種の座標変換を行なう。
Y=CH−Z×PW×(j−JV) (3)
X=r/2+Z×PW×(i−IV) (4)
ここで、 CH :CCDカメラ11(CCDカメラ12)
の取付け高さ、
PW :1画素当たりの視野角、
JV,IV:車輌1の真正面の無限遠点の画像上の
座標である。
That is, as shown in FIGS. 11 and 12, the coordinate system in the real space is a fixed coordinate system of the
Y = CH−Z × PW × (j−JV) (3)
X = r / 2 + Z × PW × (i-IV) (4)
Here, CH: CCD camera 11 (CCD camera 12)
Mounting height,
PW: viewing angle per pixel,
JV, IV: on the image at infinity point in front of
Coordinates.
また、実空間の3次元座標(X,Y,Z)から画像上の位置(i,j)を算出する式も、前記(3),(4)式を変形し、次のようになる。
j=(CH−Y)/(Z×PW)+JV (5)
i=(X−r/2)/(Z×PW)+IV (6)
尚、CCDカメラ11の取り付け位置を、前記実空間のXYZ座標系で示すと、例えば、右側のCCDカメラ11bは、X=0.20m,Y=1.24m,Z=0.0mであり、左側のCCDカメラ11aは、X=−0.20m,Y=1.24m,Z=0.0mとなる。
An expression for calculating the position (i, j) on the image from the three-dimensional coordinates (X, Y, Z) in the real space is also obtained by modifying the expressions (3) and (4).
j = (CH−Y) / (Z × PW) + JV (5)
i = (X−r / 2) / (Z × PW) + IV (6)
When the mounting position of the
図13は、前記距離画像処理用コンピュータ120の機能構成を示すものであり、主として、マイクロプロセッサ120aによる物体認識部130、マイクロプロセッサ120bによる側壁検出部140、マイクロプロセッサ120cによる隙間距離算出部160に大別され、物体認識部130及び側壁検出部140の処理結果が、出力用メモリ125からなる立体物パラメータ記憶部150に記憶され、マイクロプロセッサ120c(隙間距離算出部160)、及び、ADAのための図示しない他の装置に読み込まれる。
FIG. 13 shows a functional configuration of the distance
さらに、前記物体認識部130の機能は、物体検出部131、3次元ウインドウ発生部132、及び、物体輪郭像抽出部133に細分され、物体検出部131では、イメージプロセッサ20からの距離画像を格子状に所定の間隔(例えば、8〜20画素間隔)で区分し、各領域毎に、走行の障害となる可能性のある立体物のデータのみを選別し、その検出距離を算出する。
Further, the function of the
図14は、車輌1から前方風景を撮像した明暗画像の上に、格子状の領域を設定した説明図であり、実際には、図10の距離画像を、このように区分する。本実施例では、12画素間隔で33個の小領域AR1〜AR33に区分する。すなわち、画像を多数の領域に分割して物体を探すことにより、複数の物体を同時に検出することができるようになっている。
FIG. 14 is an explanatory diagram in which a grid-like region is set on a bright and dark image obtained by capturing a scene in front of the
各領域における被写体は、画像上の座標(i,j)と距離データZから、前述の(3),(4)式を使って実空間の3次元位置(X,Y,Z)が算出され、さらに、距離Zに於ける被写体の道路表面からの高さHは、道路表面の高さをYrとすると、次の(7)式で計算することができるが、図11,12に示すように座標系が設定されているため、車輌1に特別な傾きや上下移動が無い限り、Yr=0.0mと設定することができる。
H=Y−Yr (7)
For the subject in each area, the three-dimensional position (X, Y, Z) in the real space is calculated from the coordinates (i, j) on the image and the distance data Z using the above-described equations (3) and (4). Further, the height H of the subject from the road surface at the distance Z can be calculated by the following equation (7), where Yr is the height of the road surface, as shown in FIGS. Is set, Yr = 0.0 m can be set as long as the
H = Y-Yr (7)
高さHが0.1m程度以下の被写体は、道路上の白線や汚れ、影などであり、走行の障害になる物体ではないと考えられるため、この被写体のデータは棄却する。また、車輌の高さより上にある被写体も、歩道橋や標識などと考えられるので棄却し、道路上の障害となる立体物のデータのみを選別する。これにより、2次元の画像上で物体が道路などと重なり合っていても、道路表面からの高さによってデータを区別し、物体のみを検出できる。 A subject having a height H of about 0.1 m or less is considered to be a white line, dirt, shadow, or the like on a road, and is not considered to be an obstacle to traveling. Therefore, data of the subject is rejected. In addition, subjects located above the height of the vehicle are rejected because they are considered to be pedestrian bridges or signs, and only data on three-dimensional objects that become obstacles on the road are selected. Thus, even if an object overlaps a road or the like on a two-dimensional image, data can be distinguished based on the height from the road surface, and only the object can be detected.
次に、このようにして抽出された立体物のデータに対して、予め設定された距離Zの区間に含まれるデータの個数を数え、距離Zを横軸とするヒストグラムを作成する。図15は、例えば図9の画像例における前方右側の駐車車輌300を検出物体とするヒストグラムであり、設定する距離Zの区間の長さや区間の個数は、距離Zの検出限界や精度および検出対象の物体の形状などを考慮して決定する。
Next, with respect to the data of the three-dimensional object extracted in this manner, the number of data included in the section of the preset distance Z is counted, and a histogram having the distance Z as a horizontal axis is created. FIG. 15 is a histogram in which, for example, the
前記ヒストグラムにおいては、入力される距離画像中の距離データには、誤って検出された値も存在するので、実際には物体の存在しない位置にも多少のデータが現れる。しかし、ある程度の大きさの物体があると、その位置の度数は大きな値を示し、一方、物体が何も存在しない場合には、誤った距離データのみによって発生する度数は小さな値となる。 In the histogram, since the distance data in the input distance image includes a value which is erroneously detected, some data appears at a position where no object is actually present. However, when there is an object of a certain size, the frequency at the position shows a large value, while when there is no object, the frequency generated only by erroneous distance data becomes a small value.
従って、作成されたヒストグラムの度数が、予め設定した判定値以上かつ最大値をとる区間があれば、その区間に物体が存在すると判断し、度数の最大値が判定値以下の場合は、物体が存在しないと判断することにより、画像のデータに多少のノイズが含まれている場合においても、ノイズの影響を最小限にして物体を検出できる。 Therefore, if there is a section in which the frequency of the created histogram is equal to or greater than a predetermined determination value and has a maximum value, it is determined that an object exists in that section, and if the maximum value of the frequency is equal to or less than the determination value, the object is determined. By determining that the object does not exist, the object can be detected while minimizing the influence of the noise even when the image data includes some noise.
物体が存在すると判断されると、検出された区間と、その前後に隣接する区間に含まれている立体物のデータの距離Zの平均値を計算し、この値を物体までの距離と見なす。このような物体までの距離検出の処理を全領域について行なった後、各領域の物体の検出距離を調べ、隣接する領域において物体までの検出距離の差異が設定値以下の場合は同一の物体と見なし、一方、設定値以上の場合は別々の物体と見なす。 When it is determined that an object exists, the average value of the distance Z between the detected section and the data of the three-dimensional object included in the preceding and succeeding sections is calculated, and this value is regarded as the distance to the object. After performing such a process of detecting the distance to the object for the entire area, the detection distance of the object in each area is checked, and if the difference in the detection distance to the object in the adjacent area is equal to or less than the set value, the same object is detected. On the other hand, if it is equal to or greater than the set value, it is regarded as a separate object.
具体的には、まず、左端の領域AR1を調べ、物体が検出されている場合には、それを物体S1、距離をZ1とする。次に右隣の領域AR2を調べ、物体が検出されていない場合には、物体S1は領域AR1の内部とその近辺に存在し、その距離はZ1と判定し、物体が検出され、その検出距離がZ2である場合には、距離Z1とZ2の差を調べる。 Specifically, first, the left end area AR1 is examined, and if an object is detected, it is set as the object S1 and the distance is set as Z1. Next, the area AR2 on the right side is examined. If no object is detected, the object S1 exists inside and near the area AR1, the distance is determined to be Z1, the object is detected, and the detection distance is determined. Is Z2, the difference between the distances Z1 and Z2 is checked.
そして、距離Z1とZ2の差が設定値以上の場合、領域AR2で検出された物体は、先に検出された物体S1とは異なると判定し、新たに物体S2、距離Z2とし、さらに右隣の領域を調べて行く。 If the difference between the distances Z1 and Z2 is equal to or greater than the set value, it is determined that the object detected in the area AR2 is different from the previously detected object S1, and is newly set as the object S2 and the distance Z2. Check the area.
一方、距離Z1とZ2の差が設定値以下の場合には、領域AR2で検出された物体は、先に検出された物体S1であると判定し、その距離はZ1とZ2の平均値とし、さらに右隣の領域を順次調べて行き、連続して物体S1があると判定されれば、距離と存在領域を更新してゆく。 On the other hand, when the difference between the distances Z1 and Z2 is equal to or less than the set value, the object detected in the area AR2 is determined to be the previously detected object S1, and the distance is set to the average value of Z1 and Z2. Further, the area on the right side is sequentially examined, and if it is determined that the object S1 is continuously present, the distance and the existing area are updated.
従来、2次元の画像上で物体の周囲に遠方の背景が写っている場合には物体のデータだけを抽出することは困難であったが、以上のような処理を左端の領域AR1から右端の領域AR33まで行なって距離の値によってデータを区別することにより、複数の物体とその距離、存在領域を背景と区別して検出することができ、さらに、2次元の画像上で複数の物体が重なり合って写っている場合においても、各々の物体の距離の違いによって、それらを区別して検出できる。 Conventionally, it has been difficult to extract only the data of an object when a distant background appears around the object on a two-dimensional image. However, the above processing is performed from the left end area AR1 to the right end area AR1. By performing the processing up to the area AR33 and distinguishing the data by the value of the distance, it is possible to detect a plurality of objects, their distances, and the existence area separately from the background, and furthermore, the plurality of objects overlap on the two-dimensional image. Even in the case where they are shown, they can be distinguished and detected depending on the difference in the distance between the objects.
尚、前記設定値は、自動車を検出する場合には4m〜6m程度、歩行者を検出する場合には1m〜2m程度にすると良いことが実験的に得られている。 It has been experimentally obtained that the set value should be about 4 m to 6 m when detecting an automobile, and about 1 m to 2 m when detecting a pedestrian.
図16は、以上の処理で検出した物体の存在領域を枠線で示したものであり、、この例では左側の車輌200及び右側の車輌300の2個の物体が検出されている。図の下側に示される数値は各物体の検出距離である。
FIG. 16 shows the existence area of the object detected by the above processing by a frame line. In this example, two objects of the
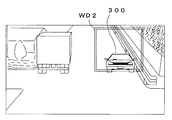
3次元ウインドウ発生部132では、前記物体検出部131で検出された各々の物体について、図17に示すような3次元空間で、検出物体(駐車車輌300)を包含する直方体状の3次元空間領域すなわち3次元ウインドウWD3を設定し、この設定した3次元ウインドウWD3が2次元の画像上でどのように見えるかを計算し、ウインドウ輪郭線の内側を2次元ウインドウWD2として、この中のデータのみを検出対象とする。
In the three-dimensional
前記3次元ウインドウWD3の横幅は、物体の存在領域より左右に1領域分だけ拡張した範囲とする。これは、ある領域に物体の左右端の一部分のみが掛かっている場合には、その物体はヒストグラム上で大きな値とならず、別の物体が検出される可能性があるため、このような場合を考慮してウインドウの範囲を拡大しておくものである。 The horizontal width of the three-dimensional window WD3 is a range extended by one region to the left and right from the region where the object exists. This is because, if only a part of the left and right ends of an object hangs over a certain area, that object does not have a large value on the histogram and another object may be detected. In consideration of the above, the range of the window is expanded.
また、3次元ウインドウWD3の距離Z方向の長さは、その物体の検出距離におけるヒストグラムの区間長さを、その検出距離の前後に加えた範囲とする。3次元ウインドウWD3の下端は、道路表面の高さに約0.1mを加えた位置とし、上端は物体検出のために区分した各領域の上端とする。 Further, the length of the three-dimensional window WD3 in the distance Z direction is a range obtained by adding the section length of the histogram at the detection distance of the object before and after the detection distance. The lower end of the three-dimensional window WD3 is a position obtained by adding about 0.1 m to the height of the road surface, and the upper end is the upper end of each area divided for object detection.
前記3次元ウインドウWD3から前記2次元ウインドウWD2を求めるには、3次元ウィンドウWD3の8個の頂点の各座標(Xn,Yn,Zn)から、前述の(5),(6)式を用いて画像上の座標(in,jn)を計算し、これらの点を包絡する多角形を計算する。図18は、先に図16で示した検出物体の内の1個(駐車車輌300)について、2次元ウインドウWD2を設定した例を示したものである。 In order to obtain the two-dimensional window WD2 from the three-dimensional window WD3, from the coordinates (Xn, Yn, Zn) of the eight vertices of the three-dimensional window WD3, using the above-described equations (5) and (6). The coordinates (in, jn) on the image are calculated, and a polygon enveloping these points is calculated. FIG. 18 shows an example in which a two-dimensional window WD2 is set for one of the detected objects (parked vehicle 300) shown in FIG.
物体輪郭像抽出部133では、前記2次元ウインドウWD2内の各データを順次サーベイし、3次元ウインドウWD3に含まれるデータのみを選別し、検出した物体の輪郭像を抽出する処理を行ない、検出物体の自車輌1との位置関係を検出する。
The object contour
すなわち、まず、物体毎に2次元ウインドウWD2内の各データを順次サーベイし、距離データを持っている画素について、前述の(3),(4)式を用いて3次元位置(X,Y,Z)を計算した後、距離や高さの値が3次元ウインドウWD3の範囲内にあるデータのみを抽出し、他は棄却する。 That is, first, each data in the two-dimensional window WD2 is sequentially surveyed for each object, and the three-dimensional positions (X, Y, and X) of the pixels having the distance data are calculated using the above-described equations (3) and (4). After calculating Z), only data whose distance and height values are within the range of the three-dimensional window WD3 are extracted, and the others are rejected.
このようにして抽出したデータを、2次元の画像上に投影して表示すると図19のようになる。さらに、これらのデータの外形を線分で連結すると、図20に示すような物体の輪郭像が得られる。この輪郭像の左右端および上端の画像上での座標(i,j)を検出し、続いて、その物体の検出距離Zと(3),(4)式を用いて、3次元空間での物体の左右端と上端の位置を算出すると、左右端の位置から物体の横幅が求まり、上端の位置から物体の高さが求まる。図20においては、幅1.7m、高さ1.3mの物体と判別できる。 FIG. 19 shows the data extracted in this manner projected and displayed on a two-dimensional image. Further, when the outlines of these data are connected by a line segment, an outline image of the object as shown in FIG. 20 is obtained. The coordinates (i, j) of the left and right ends and the upper end of this contour image on the image are detected, and subsequently, using the detection distance Z of the object and the equations (3) and (4), a three-dimensional space is obtained. When the positions of the left and right ends and the upper end of the object are calculated, the horizontal width of the object is obtained from the positions of the left and right ends, and the height of the object is obtained from the upper end position. In FIG. 20, it can be determined that the object has a width of 1.7 m and a height of 1.3 m.
一方、マイクロプロセッサ120bによる側壁検出部140の機能は、立体物データ抽出部141、側壁直線検出部142、及び、側壁範囲検出部143に細分され、側壁と道路との区別を道路表面からの高さによって行ない、側壁と遠方の背景との区別を、前後方向と横方向の距離によって行なうことにより、側壁が存在すると推定される周辺のデータのみを抽出し、続いて側壁のデータは水平方向に直線的に並んでいる特徴に注目してこれをハフ変換によって検出し、位置を求める。
On the other hand, the function of the side
すなわち、前記立体物データ抽出部141は、前記距離分布の情報の中から予め設定された道路表面より上にあるデータのみを抽出し、前記側壁直線検出部142は、抽出した立体物データの中から、予め設定された側壁の探索領域内のデータのみを抽出し、これをハフ変換で処理して側壁の有無と側壁の位置を示す直線式とを検出する。また、前記側壁範囲検出部143は、側壁の位置を示す直線式に基づいて、側壁が存在すると推定される側壁候補領域を設定し、この側壁候補領域内の立体物データの分布状態から側壁の前後端の位置を検出する。
That is, the three-dimensional object data extracting unit 141 extracts only data located above a predetermined road surface from the information of the distance distribution, and the side wall straight
詳細には、側壁は立体物の一種であるから、まず、立体物データ抽出部141で、道路表面より上にある立体物のデータを距離画像の中から抽出する。この際、高さHが0.1m程度以下の立体物は、前述したように、道路上の白線や汚れ、影等と考えられるため、この立体物のデータは棄却する。また、車輌の高さより上にある立体物も、歩道橋や標識等と考えられるので棄却し、道路上の立体物のデータのみを選別する。 More specifically, since the side wall is a kind of three-dimensional object, first, the three-dimensional object data extraction unit 141 extracts data of the three-dimensional object above the road surface from the distance image. At this time, since a three-dimensional object having a height H of about 0.1 m or less is considered to be a white line, dirt, shadow, or the like on the road as described above, the data of the three-dimensional object is rejected. Also, the three-dimensional objects above the height of the vehicle are discarded because they are considered to be pedestrian bridges and signs, and only the data of the three-dimensional objects on the road are selected.
また、前記立体物データ抽出部141では画面に写っている広範囲の立体物のデータが抽出されるが、これら全てを処理することは合理的でないため、側壁直線検出部142では側壁を探索する領域に制限を設ける。 The three-dimensional object data extraction unit 141 extracts a wide range of three-dimensional object data shown on the screen, but it is not reasonable to process all of them. Limits.
この場合、距離画像が計測される範囲を上から見ると、CCDカメラ11の視野に制限されて図21のようになっており、道路を通常走行している場合には、側壁は車輌1の左側と右側に、車輌1と概ね平行に存在する。一方、遠くの側壁は、距離データの精度の面から検出が困難になり、且つ、検出の必要性も小さい。そこで、これらを考慮し、図示したような左側と右側の2つの探索領域SL,SRを設定し、左側と右側の側壁を別々に検出して行く。
In this case, when the range in which the distance image is measured is viewed from above, it is limited to the field of view of the
すなわち、左右両側の側壁を検出するには、まず、側壁直線検出部142で左側の探索領域SLを設定して側壁直線検出処理及び側壁範囲検出処理を行なって左側の側壁を検出した後、再び側壁直線検出部142で右側の探索領域SRを設定し、同様の処理を繰り返して右側の側壁を検出するのである。
That is, in order to detect the left and right side walls, first, the side wall straight
各探索領域SL,SRに含まれる立体物データを抽出するには、前記立体物データ抽出部141で抽出された各データの被写体の3次元位置(X,Z座標)を計算し、この3次元位置(X,Z)と各探索領域SL,SRとを、それぞれ比較して判定する。 In order to extract the three-dimensional object data included in each of the search areas SL and SR, the three-dimensional position (X, Z coordinates) of the subject of each data extracted by the three-dimensional object data extraction unit 141 is calculated, and the three-dimensional position is calculated. The position (X, Z) and each of the search areas SL and SR are compared and determined.
例えば図22に示すような状況では、画像上に前記各探索領域SL,SRを図示すると破線のようになり、これらの探索領域内にも、目的とする側壁の他に様々な立体物が存在する。さらに、距離画像にはノイズ状の偽データも含まれており、実際には物体が存在しない空間にデータのみが分散して存在する。これらのデータを模式的に示すと図23のようになり、この中で側壁は、そのデータが直線状に並んでいる特徴がある。そこで、ハフ変換を使用してデータの列の直線式を検出することによって側壁の検出を行なう。 For example, in the situation shown in FIG. 22, the above-described search areas SL and SR are shown as broken lines on the image, and various three-dimensional objects other than the target side wall also exist in these search areas. I do. Furthermore, the range image also includes false data in the form of noise, and only data is dispersed in a space where no object actually exists. FIG. 23 schematically shows these data, in which the side wall has a feature that the data is arranged in a straight line. Therefore, the side wall is detected by detecting the linear equation of the data column using the Hough transform.
このハフ変換による直線式の検出について説明すると、まず、図24の立体物データPi(座標Xi,Zi)に対し、このデータPiの点を通る直線Fiを想定する。この直線の式は、以下の(8)式で示される。
X=afi×Z+bfi (8)
Describing the detection of a straight line equation by the Hough transform, first, a straight line Fi passing through a point of the solid object data Pi (coordinates Xi, Zi) in FIG. 24 is assumed. The equation of this straight line is represented by the following equation (8).
X = afi × Z + bfi (8)
次に図25に示すように、縦軸が式(8)の傾きaf、横軸が切片bfのパラメータ空間を設定し、式(8)のパラメータafi,bfiに相当する位置に投票を行う。 Next, as shown in FIG. 25, the vertical axis sets the parameter space of the slope af of the equation (8), and the horizontal axis sets the parameter space of the intercept bf, and performs voting at positions corresponding to the parameters afi and bfi of the equation (8).
ここで、傾きafiの値は、前述したように側壁は車輌1と概ね平行と考えられるため、一般道路では、例えば±20゜(afi:±0.36)程度の範囲で変化させれば実用上十分である。また、切片bfi の値は、左側の側壁を検出する場合、車輌1の左脇である例えばX=−1mから−10m程度の範囲、右側の側壁を検出する場合には、例えばX=+1mから+10m程度の範囲に制限する。このように、制限範囲を例えば±10m程度にするのは、あまり遠く離れた側壁の検出は実用面の必要性が小さいためである。
Here, as described above, the value of the slope afi is considered to be practically used on a general road if it is changed within a range of about ± 20 ° (afi: ± 0.36), for example, since the side wall is considered to be substantially parallel to the
このような制限により、パラメータ空間上で投票が行われる範囲は、図25に示すような矩形領域となり、この矩形領域はさらに格子状に分割されて各格子毎に投票される。式(8)の傾きafiは、所定の変化範囲内(例えば±10゜〜±20゜)であり、格子間隔Δaf毎に順次変化させて設定する。切片bfiは、設定された傾きafiと立体物データPiの座標(Xi,Zi)を式(8)に代入して算出され、これが前記制限範囲内であればパラメータ空間の該当する格子に投票される。 Due to such a limitation, the range in which voting is performed in the parameter space is a rectangular area as shown in FIG. 25, and this rectangular area is further divided into a grid shape and voted for each grid. The slope afi of the equation (8) is within a predetermined change range (for example, ± 10 ° to ± 20 °), and is set by sequentially changing the grid interval Δaf. The intercept bfi is calculated by substituting the set inclination afi and the coordinates (Xi, Zi) of the three-dimensional object data Pi into the equation (8). You.
検出される側壁の位置、すなわち直線式の傾きと切片の検出精度は、格子間隔Δaf,Δbfによって決定され、格子間隔Δaf,Δbfの設定は、側壁の情報を利用する外部装置側の要求に基づいて行なわれる。例えば、道路を通常走行する場合の衝突等の危険の検知として利用する場合には、格子間隔Δafは1〜2゜程度、格子間隔Δbfは0.3〜0.6m程度が良い。 The position of the detected side wall, that is, the linear inclination and intercept detection accuracy is determined by the lattice intervals Δaf and Δbf, and the setting of the lattice intervals Δaf and Δbf is based on a request from the external device using the information on the side wall. It is done. For example, when used for detecting danger such as a collision in the case of normal traveling on a road, the grid interval Δaf is preferably about 1 to 2 °, and the grid interval Δbf is preferably about 0.3 to 0.6 m.
以上のようにして探索領域内の全立体物データに対してパラメータ空間への投票を行なう際、図24に示すように、直線的に並んだデータが存在すると、このデータの列と一致するように設定した直線のパラメータafi,bfiに相当するパラメータ空間の格子は多くの得票を得て、左右の投票領域SL,SR毎に局所極大値が現れる。 When voting in the parameter space for all three-dimensional object data in the search area as described above, if there is linearly arranged data as shown in FIG. In the parameter space grid corresponding to the straight line parameters afi and bfi set in the above, many votes are obtained, and local maxima appear in the left and right voting regions SL and SR.
側壁が存在し、明確な立体物データの列があるとパラメータ空間の局所極大値は大きな値を示し、一方、側壁が無く、複数の物体が分散して存在する状態では局所極大値は小さい値を示す。従って、パラメータ空間の左右の投票領域SL,SR毎に局所極大値を検出し、検出した局所極大値が判定値以上であれば側壁が存在すると判定することができる。判定値は設定する探索領域の大きさや格子の間隔等を考慮して設定する。 If there is a side wall and there is a clear column of three-dimensional object data, the local maximum value in the parameter space shows a large value. On the other hand, if there are no side walls and multiple objects are dispersed, the local maximum value is a small value. Is shown. Therefore, the local maximum value is detected for each of the left and right voting regions SL and SR in the parameter space, and if the detected local maximum value is equal to or greater than the determination value, it can be determined that the side wall exists. The judgment value is set in consideration of the size of the search area to be set, the interval between the lattices, and the like.
次に、前記側壁直線検出部142で側壁有りと判定された場合には、側壁範囲検出部143で側壁の前後端の位置を検出する。局所極大値の格子に相当するパラメータaf,bfを読み出すと、側壁は、次の直線式(9)に沿って存在すると推定され、図24の例で検出された直線式を図示すると図26に示す直線Ffとなる。
X=af×Z+bf (9)
Next, when the side wall straight
X = af × Z + bf (9)
まず、直線Ffを中心として幅0.3m〜1.0m程度の領域を側壁候補領域Tfとすると、この領域は、さらに図26のようにZ方向に区分される。側壁候補領域Tfの幅は、前記パラメータ空間の格子の間隔Δbfにデータの誤差等を考慮して設定する。 First, assuming that a region having a width of about 0.3 m to 1.0 m around the straight line Ff is a side wall candidate region Tf, this region is further divided in the Z direction as shown in FIG. The width of the side wall candidate region Tf is set in consideration of a data error or the like in the lattice space Δbf of the parameter space.
次に、前記探索領域内の立体物データを順次サーベイし、側壁候補領域Tf内にあるデータのみを抽出した後、区分毎に立体物データの個数をカウントし、ヒストグラムを作成する。これを模式的に示すと図27のようになり、側壁が存在する部分では大きな度数を示す。従って、度数が判定値以上の区分を検出することによって、この範囲に側壁が存在すると判断することができ、その両端の3次元位置を計算して側壁の前後端位置とする。図24の例では、探索領域SRの上端が側壁(ガードレール400)の後端位置とみなされる。図28は以上の処理で検出した側壁を枠線で示したものであり、この例では、右側のガードレール400が検出される。
Next, the three-dimensional object data in the search area is surveyed sequentially, and only the data in the side wall candidate area Tf is extracted. Then, the number of three-dimensional object data is counted for each section, and a histogram is created. This is schematically shown in FIG. 27, where the portion where the side wall exists has a large frequency. Therefore, by detecting a section whose frequency is equal to or greater than the determination value, it can be determined that a side wall exists in this range, and the three-dimensional positions at both ends are calculated to be the front and rear end positions of the side wall. In the example of FIG. 24, the upper end of the search region SR is regarded as the rear end position of the side wall (guardrail 400). FIG. 28 shows the side wall detected by the above processing by a frame line. In this example, the
以上のようにして、距離画像から道路上の各物体の位置、形状等のパラメータが求められ、立体物パラメータ記憶部150に書き込まれると、マイクロプロセッサ120cからなる隙間距離算出部160では、自車輌1と検出した物体との間の左右の隙間距離を算出する。
As described above, when the parameters such as the position and shape of each object on the road are obtained from the distance image and written into the three-dimensional object
例えば前述した図9の画像例では、駐車車輌200,300の自車輌1側の前方の縁のX座標をXL,XR、ガードレール400の前方の端のX座標をXWRとすると、図29に示すように、自車輌1の左側の延長線と左側の駐車車輌200の縁との間の距離DLは、自車輌1の車幅をWとして以下の(10)式で算出され、また、自車輌1の右側の延長線と右側の駐車車輌300との間の距離DRは(11)式で算出され、さらに、自車輌1の右側の延長線と右側のガードレール400との間の距離DWRは(12)式で算出される。
DL =|XL |−W/2 (10)
DR =|XR |−W/2 (11)
DWR=|XWR|−W/2 (12)
For example, in the image example of FIG. 9 described above, if the X coordinates of the front edges of the parked
DL = | XL | -W / 2 (10)
DR = | XR | -W / 2 (11)
DWR = | XWR | -W / 2 (12)
そして、(10),(11),(12)式による計算を各縁について行う。そして、左右それぞれの最小値を求めると、この最小値が最近接距離すなわち隙間距離となり、この隙間距離に若干の余裕、例えば相手車のバックミラー等のための余裕を加えてディスプレイ3に出力し、前述の図3のようにディスプレイ3に表示させる。
Then, calculations based on the equations (10), (11), and (12) are performed for each edge. When the minimum value of each of the left and right sides is obtained, the minimum value becomes the closest distance, that is, the clearance distance. The clearance distance is added to a margin, for example, a rearview mirror of the opponent vehicle, and output to the
尚、図9の画像例では、ガードレール400との距離DWRより駐車車輌300との距離DRの方が小さいので、右側隙間距離として駐車車輌300との距離DRを採用し、ディスプレイ3に出力する。
In the image example of FIG. 9, since the distance DR to the
また、ディスプレイ3に表示する隙間距離の数値には、例えば1mといったしきい値を設け、このしきい値以上の数値は表示しないようになっている。これは、隙間が十分大きい場合には、数値を表示する意味が少ないからである。
Further, a threshold value such as 1 m is provided for the numerical value of the gap distance displayed on the
次に、イメージプロセッサ20及び距離画像処理用コンピュータ120の動作について説明する。
Next, the operations of the
図30は、イメージプロセッサ20の動作の流れを示すフローチャートであり、まず、ステップS101で左右のCCDカメラ11a,11bによって撮像した画像を入力すると、ステップS102で、入力したアナログ画像をA/Dコンバータ31a,31bで所定の輝度階調を有するデジタル画像にA/D変換した後、LUT32a,32bで、低輝度部分のコントラスト増強、左右のCCDカメラ11a,11bの特性補償等を行ない、画像メモリ33a,33bに記憶する。
FIG. 30 is a flowchart showing the flow of the operation of the
これらの画像メモリ33a,33bに記憶される画像は、CCDカメラ11a,11bのCCD素子の全ラインのうち、その後の処理に必要なラインのみであり、例えば0.1秒に1回の割合(テレビ画像で3枚に1枚の割合)で書き換えられる。
The images stored in these
次に、ステップS103へ進むと、左右画像用の画像メモリ33a,33bから入力バッファメモリ41a,41b,42a,42bへ、共通バス80を介して、例えば4ラインずつ左右画像データが読み込まれ、読み込んだ左右画像のマッチング、すなわち一致度の評価が行なわれる。
Next, in step S103, the left and right image data are read from the
その際、左右の画像毎に、前記画像メモリ33a,33bから前記入力バッファメモリ41a,41b,42a,42bへの読み込み動作と、シフトレジスタ43a,43b,44a,44bに対する書き込み動作とが交互に行なわれる。例えば、左画像では、画像メモリ33aから一方の入力バッファメモリ41aに画像データが読み込まれている間に、他方の入力バッファメモリ41bからシフトレジスタ43bへ読み込んだ画像データの書き出しが行なわれ、右画像では、画像メモリ33bから一方の入力バッファメモリ42aに画像データが読み込まれている間に、他方の入力バッファメモリ42bからシフトレジスタ44bへ読み込んだ画像データの書き出しが行なわれる。
At this time, a read operation from the
図31に示すように、前記シフトレジスタ43a,43b,44a,44bには、左右の4×4画素の小領域の画像データ(1,1)…(4,4)が保存され、一方のシフトレジスタ43a(44a)には1、2ラインのデータが、もう一方のシフトレジスタ43b(44b)には3、4ラインのデータが、それぞれ1画素毎に奇数ライン、偶数ラインの順序で入る。前記各シフトレジスタ43a,43b,44a,44bは、それぞれが独立した転送ラインを持ち、4×4画素のデータは例えば8クロックで転送される。
As shown in FIG. 31, the
そして、これらのシフトレジスタ43a,43b,44a,44bから8段のうちの偶数段の内容が同時にシティブロック距離計算回路45に出力され、シティブロック距離Hの計算が始まると、右画像のデータはシフトレジスタ44a,44b内に保持されて、クロック毎に奇数ライン、偶数ラインのデータが交互に出力され、一方、左画像のデータはシフトレジスタ43a,43bに転送され続け、奇数ライン、偶数ラインのデータが交互に出力されつつ、2クロック毎に1画素分右のほうにずれたデータに置き換わっていく。この動作を、例えば100画素分ずれるまで(200クロック)繰り返す。
Then, the contents of the even-numbered stages of the eight stages are simultaneously output from the
その後、一つの小領域に対する転送が終了すると、#2アドレスコントローラ87内の左画像用アドレスカウンタに右画像用アドレスカウンタの内容(次の4×4画素の小領域の先頭アドレス)がセットされ、次の小領域の処理が始まる。
Thereafter, when the transfer for one small area is completed, the contents of the right image address counter (the head address of the next 4 × 4 pixel small area) are set in the left image address counter in the # 2
シティブロック距離計算回路45では、図32のタイミングチャートに示すように、まず、ピラミッド型構造初段の絶対値演算器に8画素分のデータを入力し、左右画像の輝度差の絶対値を計算する。すなわち、右画素の輝度から対応する左画素の輝度を引き算し、結果が負になった場合、演算命令を変えることにより、引く方と引かれる方を逆にして再び引き算を行なうことにより、絶対値の計算を行なう。従って、初段では引き算を2回行なう場合がある。
In the city block
次いで、初段を通過すると、2段目から4段目までの第1ないし第3加算器で二つの同時入力データを加算して出力する。そして、最終段の総和加算器で二つの連続するデータを加え合わせて総和を計算し、必要とする16画素分のシティブロック距離Hを2クロック毎に最小・最大値検出部50へ出力する。 Next, after passing through the first stage, the first to third adders of the second to fourth stages add and output two simultaneous input data. Then, the total sum adder at the last stage adds two consecutive data to calculate the sum, and outputs the required city block distance H for 16 pixels to the minimum / maximum value detection unit 50 every two clocks.
次に、ステップS104へ進み、前記ステップS103で算出したシティブロック距離Hの最大値HMAX、最小値HMINを検出する。前述したように、この最大値HMAXの検出と最小値HMINの検出とは、互いに論理が逆になることと、ずれ量を保存しないこと以外は、全く同じであるため、以下、代表して最小値HMINの検出について説明する。 Next, the process proceeds to step S104, where the maximum value HMAX and the minimum value HMIN of the city block distance H calculated in step S103 are detected. As described above, the detection of the maximum value HMAX and the detection of the minimum value HMIN are exactly the same except that the logic is reversed and the deviation amount is not preserved. The detection of the value HMIN will be described.
まず、最初に出力されてきたシティブロック距離H(ずれ量x=0)が、図8に示す最小値検出回路51のCラッチ53を介して、演算器46のBレジスタ46bに入力される。次のクロックで出力されてきたシティブロック距離H(ずれ量δ=1)は、Cラッチ53と演算器46のAレジスタ46aとに入れられ、演算器46では、同時に、Bレジスタ46bとの比較演算が始まる。
First, the initially output city block distance H (shift amount x = 0) is input to the
前記演算器46での比較演算の結果、Bレジスタ46bの内容よりもAレジスタ46aの内容の方が小さければ、次のクロックのときに、Cラッチ53の内容(すなわちAレジスタ46aの内容)がBレジスタ46bに送られ、このときのずれ量δがDラッチ55に保存される。このクロックで同時に、次のシティブロック距離H(ずれ量δ=2)がAレジスタ46aとCラッチ53に入れられ、再び比較演算が始まる。
As a result of the comparison operation in the
このようにして、計算途中での最小値が常にBレジスタ46bに、そのときのずれ量δがDラッチ55に保存されながら、ずれ量δが100になるまで計算が続けられる。計算が終了すると(最後のシティブロック距離Hが出力されてから1クロック後)、Bレジスタ46bとDラッチ55の内容はずれ量決定部60に読み込まれる。
In this way, the calculation is continued until the shift amount δ reaches 100 while the minimum value during the calculation is always stored in the
この間に、前述したシティブロック距離計算回路45では次の小領域の初期値が読み込まれ、時間の無駄を生じないようになっており、一つのシティブロック距離Hを計算するのに、例えば4クロックかかるが、パイプライン構造をとっているため、2クロック毎に新たな計算結果が得られる。
During this time, the above-mentioned city block
そして、前記ステップ104でシティブロック距離Hの最小値HMIN、最大値HMAXが確定すると、ステップS105では、ずれ量決定部60にて、前述した3つの条件がチェックされ、ずれ量xが決定される。
When the minimum value HMIN and the maximum value HMAX of the city block distance H are determined in
すなわち、図33のタイミングチャートに示すように、Bバス62bを介して最小値HMINが演算器61のBレジスタ72にラッチされるとともに、このBレジスタ72の値と比較されるしきい値HAがAバス62aを介してAレジスタ71にラッチされる。そしてALU70で両者が比較され、しきい値HAよりも最小値HMINの方が大きければ、スイッチ回路65がリセットされ、以後のチェックの如何に係わらず常に0が出力されるようになる。
That is, as shown in the timing chart of FIG. 33, the minimum value HMIN is latched by the B register 72 of the arithmetic unit 61 via the B bus 62b, and the threshold value HA to be compared with the value of the B register 72 is The data is latched by the A register 71 via the A bus 62a. The two are compared by the
次に、Aレジスタ71に最大値HMAXがラッチされ、このAレジスタ71にラッチされた最大値HMAXとBレジスタ72に保存されている最小値HMINとの差が計算されて、その結果がFレジスタ73に出力される。次のクロックでAレジスタ71にしきい値HBがラッチされ、Fレジスタ73の値と比較される。Aレジスタ71にラッチされたしきい値HBよりもFレジスタ73の内容の方が小さければ同様にスイッチ回路65がリセットされる。
Next, the maximum value HMAX is latched in the A register 71, and the difference between the maximum value HMAX latched in the A register 71 and the minimum value HMIN stored in the B register 72 is calculated. 73 is output. At the next clock, the threshold value HB is latched in the A register 71 and compared with the value of the F register 73. If the content of the F register 73 is smaller than the threshold value HB latched by the A register 71, the
次のクロックからは、隣接画素間の輝度差の計算が始まる。輝度データが保存されている2組のシフトレジスタ64a,64bは10段構成であり、それぞれ、シティブロック距離計算部40の1,2ライン用のシフトレジスタ44aと、3,4ライン用のシフトレジスタ44bの後段に接続されている。前記シフトレジスタ64a,64bの出力は最後の段とその2つ手前の段から取り出され、それぞれが、Aバス62aとBバス62bとに出力される。
From the next clock, calculation of the luminance difference between adjacent pixels starts. The two sets of
輝度差の計算が始まるとき、前記シフトレジスタ64a,64bの各段には小領域中の各場所の輝度データが保持されており、初めに前回の小領域の第4行第1列の輝度データと、今回の小領域の第1行第1列の輝度データとが、演算器61のAレジスタ71とBレジスタ72とにラッチされる。
When the calculation of the luminance difference is started, the luminance data of each location in the small area is held in each stage of the
そして、Aレジスタ71の内容とBレジスタ72の内容の差の絶対値が計算され、結果がFレジスタ73に保存される。次のクロックでAレジスタ71にしきい値HCがラッチされ、Fレジスタ73の値と比較される。 Then, the absolute value of the difference between the contents of the A register 71 and the contents of the B register 72 is calculated, and the result is stored in the F register 73. At the next clock, the threshold value HC is latched in the A register 71 and is compared with the value of the F register 73.
前記演算器61での比較結果、Aレジスタの内容(しきい値HC)よりもFレジスタ73の内容(輝度差の絶対値)のほうが大きければ、前記スイッチ回路65からずれ量xあるいは”0”が出力され、、Aレジスタの内容よりもFレジスタ73の内容のほうが小さければ”0”が出力されて、出力バッファメモリ66a,66bの該当する小領域の第1行第1列に当たる位置に書き込まれる。
As a result of the comparison by the arithmetic unit 61, if the content of the F register 73 (the absolute value of the luminance difference) is larger than the content of the A register (the threshold value HC), the shift amount x or “0” from the
前記演算器61で隣接画素間の輝度差としきい値HCとの比較が行なわれている間に、シフトレジスタ64a,64bは1段シフトする。そして今度は、前回の小領域の第4行第2列と、今回の小領域の第1行第2列の輝度データに対して計算を始める。このようにして小領域の第1列、第2列に対し交互に計算を行なった後、第3列、第4列に対して同様に計算を進める。
While the arithmetic unit 61 compares the luminance difference between adjacent pixels with the threshold value HC, the
計算中は、シフトレジスタ64a,64bの最終段と最初の段がつながってリングレジスタになっており、小領域全体を計算した後にシフトクロックが2回追加されるとレジスタの内容が計算前の状態に戻り、次の小領域の輝度データが転送され終わったときに、最終段とその前の段に今回の小領域の第4行のデータが留められる。
During the calculation, the last stage and the first stage of the
このように、ずれ量決定のための計算中に次のデータをAバス62a,Bバス62bに用意したり、結果の書き込みを行なうため、計算に必要な2クロックのみで一つのデータが処理される。この結果、初めに行なう最小値HMIN、最大値HMAXのチェックを含めても、例えば43クロックで全ての計算が終了し、一つの小領域に対して、シティブロック距離Hの最小値HMIN、最大値HMAXを求めるのに要する時間は充分に余裕があり、さらに機能を追加することも可能となっている。 In this way, during the calculation for determining the shift amount, the next data is prepared on the A bus 62a and the B bus 62b, and the result is written, so that one data is processed only by two clocks necessary for the calculation. You. As a result, even if the check of the minimum value HMIN and the maximum value HMAX performed at the beginning is included, all calculations are completed at, for example, 43 clocks, and the minimum value HMIN and the maximum value of the city block distance H are calculated for one small area. There is plenty of time to find HMAX, and more features can be added.
そして、ずれ量xが決定されると、ステップS106で、出力バッファメモリ66a,66bからデュアルポートメモリ90へ、ずれ量xを距離分布情報として出力し、イメージプロセッサ20における処理が終了する。
When the shift amount x is determined, the shift amount x is output as distance distribution information from the output buffer memories 66a and 66b to the
この出力バッファメモリ66a,66bは、前述した入力バッファメモリ41a,41b,42a,42bと同様、例えば4ライン分の容量があり、2組の一方に書き込んでいる間にもう一方から前記デュアルポートメモリ90へ距離分布情報を送り出す。
The output buffer memories 66a and 66b have a capacity of, for example, four lines, similar to the
前記デュアルポートメモリ90へ書き込まれた距離分布情報からは、CCDカメラ11,12の取付け位置と焦点距離等のレンズパラメータとから、各画素に対応する物体のXYZ空間における3次元位置を算出することができ、情報量の低下なく車外の対象物までの距離を正確に検出することができる。
From the distance distribution information written in the
ここで、イメージプロセッサ20の全体のタイミングについて、図34に示すタイミングチャートに従って説明する。
Here, the overall timing of the
まず初めに、同期を取っている左右のCCDカメラ11a,11bからのフィールド信号を0.1秒毎(3画面に1画面の割合)に、画像メモリ33a,33bに書き込む。
First, the field signals from the synchronized left and
次に、取り込み終了信号を受けて、4ライン毎のブロック転送が始まる。この転送は、右画像、左画像、結果の距離分布像の順に3ブロック転送する。 Next, upon receiving the capture end signal, block transfer for every four lines starts. In this transfer, three blocks are transferred in the order of the right image, the left image, and the resulting distance distribution image.
この間に、一方の入出力バッファメモリに対してずれ量δの計算が行われる。そして、ずれ量δの計算時間を考慮し、所定時間待機してからもう一方の入出力バッファメモリに対して転送を始める。 During this time, the calculation of the shift amount δ is performed for one input / output buffer memory. Then, in consideration of the calculation time of the deviation amount δ, the transfer to the other input / output buffer memory is started after waiting for a predetermined time.
一つの右画像の4×4画素の小領域に対するシティブロック距離Hの計算は、左画像について100画素ずらしながら計算するため、100回行われる。一つの領域のシティブロック距離Hが計算されている間に、その前の領域のずれ量δが各チェックを経て距離分布として出力される。 The calculation of the city block distance H for a small area of 4 × 4 pixels of one right image is performed 100 times because the calculation is performed while shifting the left image by 100 pixels. While the city block distance H of one area is being calculated, the shift amount δ of the previous area is output as a distance distribution through each check.
処理すべきライン数を200とすると4ライン分の処理を50回繰り返すことになり、計算の開始時に最初のデータを転送するための4ライン分の処理時間、計算終了後に最後の結果を画像認識部に転送するための4ライン分の処理時間と、計8ライン分の処理時間がさらに必要となる。 Assuming that the number of lines to be processed is 200, the processing for four lines is repeated 50 times, the processing time for four lines for transferring the first data at the start of the calculation, and the final result after the calculation is completed. Further, a processing time for four lines for transferring to the unit and a processing time for a total of eight lines are further required.
最初の入力画像ラインの転送を開始してから最後の距離分布を転送し終わるまでの時間は、実際の回路動作の結果、0.076秒である。 The time from the start of the transfer of the first input image line to the end of the transfer of the last distance distribution is 0.076 seconds as a result of the actual circuit operation.
一方、図35及び図36のフローチャートは、マイクロプロセッサ120aで実行される物体検出処理であり、ステップS201で道路表面の位置を設定すると、ステップS202で、イメージプロセッサ20からの距離画像を格子状の領域に区分し、ステップS203で、最初の領域のデータを読み込む。
On the other hand, the flowcharts of FIGS. 35 and 36 are object detection processing executed by the
次に、ステップS204へ進んで、領域内の最初のデータをセットすると、ステップS205で、被写体の3次元位置(X,Y,Z)、すなわち距離と高さを算出し、ステップS206で、距離Zに於ける道路表面の高さを算出し、ステップS207で、道路面より上にあるデータを選別する。 Next, proceeding to step S204, when the first data in the area is set, the three-dimensional position (X, Y, Z) of the subject, that is, the distance and height are calculated in step S205, and the distance is calculated in step S206. The height of the road surface at Z is calculated, and in step S207, data located above the road surface is selected.
そして、ステップS208へ進んで最終データか否かを調べ、最終データでない場合、ステップS209で領域内の次のデータをセットすると、前述のステップS205へ戻って処理を繰り返し、最終データの場合にはステップS208からステップS210へ進む。 Then, the process proceeds to step S208 to check whether the data is the final data. If the data is not the final data, the next data in the area is set in step S209, and the process returns to the above-described step S205 to repeat the processing. The process proceeds from step S208 to step S210.
ステップS210では、ヒストグラムを作成し、ステップS211で、このヒストグラムの度数が判定値以上で、かつ最大値となる区間を検出する。ヒストグラムの度数が判定値以上で、かつ最大値となる区間が検出された場合、ステップS212で、その区間に物体が存在すると判断し、その物体までの距離を検出する。 In step S210, a histogram is created. In step S211, a section in which the frequency of this histogram is equal to or greater than the determination value and has a maximum value is detected. If a section where the frequency of the histogram is equal to or greater than the determination value and has the maximum value is detected, in step S212, it is determined that an object exists in the section, and the distance to the object is detected.
そして、ステップS213で、最終領域か否かを調べ、最終領域でない場合には、ステップS214で、次の領域のデータを読み込み、前述のステップS204へ戻って同様の処理を続行し、最終領域である場合には、ステップS215へ進み、各物体の距離と存在領域の検出を終了し、ステップS216以降へ進む。 Then, in step S213, it is checked whether or not it is the last area. If it is not the last area, the data of the next area is read in step S214, the process returns to step S204, and the same processing is continued. If there is, the process proceeds to step S215, the detection of the distance and the existence area of each object ends, and the process proceeds to step S216 and subsequent steps.
ステップS216では、最初の物体のパラメータをセットし、次いで、ステップS217で、3次元ウインドウWD3の下端の高さ及び距離範囲を設定し、ステップS218で、この3次元ウインドウWD3に基づいて2次元ウインドウWD2の形状を算出してステップS219へ進む。 In step S216, the parameters of the first object are set. Next, in step S217, the height and distance range of the lower end of the three-dimensional window WD3 are set. In step S218, the two-dimensional window WD3 is set based on the three-dimensional window WD3. The shape of WD2 is calculated, and the process proceeds to step S219.
ステップS219では、2次元ウインドウWD2内のデータを読み出し、ステップS220で被写体の3次元位置を算出すると、ステップS221へ進んで、3次元ウインドウWD3内に含まれるデータを選別して抽出する。 In step S219, the data in the two-dimensional window WD2 is read out, and after calculating the three-dimensional position of the subject in step S220, the process proceeds to step S221 to select and extract the data included in the three-dimensional window WD3.
その後、ステップS222へ進み、前記ステップS221で抽出したデータを2次元の画像上に投影すると、ステップS223で、各データを線分で連結して輪郭像を作成する。続いて、ステップS224で、物体の形状、寸法、位置、速度を算出し、ステップS225で、最終物体か否かを調べる。 Then, the process proceeds to step S222, where the data extracted in step S221 is projected on a two-dimensional image, and in step S223, each data is connected by a line segment to create a contour image. Subsequently, in step S224, the shape, size, position, and speed of the object are calculated, and in step S225, it is determined whether the object is the final object.
最終物体でない場合には、ステップS226で次の物体のパラメータをセットして前述のステップS217へ戻り、最終物体である場合には、ステップS227へ進んで、各物体の位置、形状、速度、加速度、衝突の可能性等のパラメータを出力用メモリ125に書き込み、処理を終了する。
If it is not the final object, the parameters of the next object are set in step S226, and the process returns to step S217.If it is the final object, the process proceeds to step S227, where the position, shape, velocity, acceleration of each object Then, parameters such as the possibility of collision are written in the
また、マイクロプロセッサ120bでは、前記マイクロプロセッサ120aによる物体検出処理と並列して図37及び図38に示す側壁検出処理を行なう。この側壁検出処理では、最初に、ステップS301で道路表面の位置を設定すると、ステップS302で、距離画像から最初の距離データを読み込む。
The
次に、ステップS303へ進み、被写体の位置(X,Z座標)と高さ(Y座標)とを計算し、ステップS304で、距離Zに於ける道路表面の高さH(Y座標)を計算し、ステップS305で、道路面より上、且つ自車輌1の高さ以下にあるデータを立体物データとして抽出する。
Next, the process proceeds to step S303, where the position (X, Z coordinates) and height (Y coordinate) of the subject are calculated, and in step S304, the height H (Y coordinate) of the road surface at the distance Z is calculated. Then, in step S305, data above the road surface and below the height of the
そして、ステップS306へ進んで最終データか否かを調べ、最終データでない場合、ステップS307で次の距離データを読み込むと前述のステップS303へ戻って処理を繰り返し、最終データの場合にはステップS306からステップS308へ進む。 Then, the process proceeds to step S306 to check whether the data is the final data. If the data is not the final data, the next distance data is read in step S307, and the process returns to the above-described step S303 to repeat the processing. Proceed to step S308.
ステップS308では、最初の立体物データを読み込み、ステップS309で、被写体の位置(X,Z座標)を計算すると、続くステップS310で、計算した位置(X,Z座標)が探索領域内か否かを調べる。 In step S308, the first three-dimensional object data is read. In step S309, the position (X, Z coordinate) of the subject is calculated. In step S310, whether the calculated position (X, Z coordinate) is within the search area is determined. Find out.
計算した位置(X,Z座標)が探索領域外であるときには、前記ステップS310からステップS312へジャンプし、探索領域内のとき、前記ステップS310からステップS311へ進んでパラメータ空間へ投票し、ステップS312へ進む。 When the calculated position (X, Z coordinates) is outside the search area, the process jumps from step S310 to step S312. When the calculated position (X, Z coordinates) is within the search area, the process proceeds from step S310 to step S311 to vote in the parameter space. Proceed to.
ステップS312では、処理した立体物データが最終データか否かを調べ、最終データでないときには、ステップS313で、次の立体物データを読み込んで、前述のステップS309からの処理を繰り返し、最終データのとき、ステップS314へ進んで、パラメータ空間上の局所極大値を検出する。 In step S312, it is checked whether or not the processed three-dimensional object data is final data.If not, the next three-dimensional object data is read in step S313, and the processing from step S309 described above is repeated. Proceeding to step S314, the local maximum value in the parameter space is detected.
次いで、ステップS315へ進むと、検出した局所極大値が判定値以上か否かを調べ、判定値よりも小さいとき、ステップS316で側壁は存在しないと判定し、判定値以上のとき、ステップS317で、側壁が存在すると判定して、ステップS318へ進む。 Next, when the process proceeds to step S315, it is determined whether the detected local maximum value is equal to or greater than the determination value.If the detected local maximum value is smaller than the determination value, it is determined that there is no side wall in step S316. , It is determined that the side wall exists, and the process proceeds to step S318.
ステップS318では、前記ステップS314で検出した局所極大値の格子に相当するパラメータ、すなわち局所極大点が示す直線式のパラメータ(af,bf)を読み込み、次いで、ステップS319で側壁候補領域を設定する。 In step S318, a parameter corresponding to the lattice of the local maximum value detected in step S314, that is, a linear expression parameter (af, bf) indicated by the local maximum point is read, and then, in step S319, a side wall candidate region is set.
そして、ステップS320へ進み、探索領域内の最初の立体物データを読み込むと、ステップS321で、被写体の位置(X,Z座標)を計算し、ステップS322で、側壁候補領域内にあるデータを抽出した後、ステップS323で、処理したデータが探索領域内の最終データか否かを調べる。 Then, the process proceeds to step S320, where the first three-dimensional object data in the search area is read. In step S321, the position (X, Z coordinates) of the subject is calculated. In step S322, data in the side wall candidate area is extracted. After that, in step S323, it is checked whether or not the processed data is the last data in the search area.
探索領域内の最終データでないときには、前記ステップS323からステップS324へ分岐して探索領域内の次の立体物データを読み込んで、前述のステップS321へ戻り、探索領域内の最終データであるときには、前記ステップS323からステップS325へ進んで、側壁候補領域内のデータを使ってヒストグラムを作成する。 If it is not the last data in the search area, the process branches from step S323 to step S324 to read the next three-dimensional object data in the search area, and returns to step S321.If it is the last data in the search area, Proceeding from step S323 to step S325, a histogram is created using the data in the side wall candidate region.
次に、ステップS326へ進み、作成したヒストグラムの度数が判定値以上の区分を検出すると、ステップS327で、ヒストグラムの度数が判定値以上の区間の両端の3次元位置、すなわち側壁の前後端位置を算出し、ステップS328で、側壁の有無、位置、方向、前後端の位置等のパラメータを出力用メモリ125へ書き込んでプログラムを終了する。尚、このプログラムは、左側の側壁について実行した後、右側の側壁について実行する。
Next, the process proceeds to step S326, and when a section in which the frequency of the created histogram is equal to or greater than the determination value is detected, in step S327, the three-dimensional positions of both ends of the section in which the frequency of the histogram is equal to or greater than the determination value, that is, the front and rear end positions of the side wall are determined. Then, in step S328, parameters such as the presence / absence of the side wall, the position, the direction, and the positions of the front and rear ends are written in the
以上の処理により、前方に存在する壁、駐車車輌等の自車輌1からの位置と大きさがわかり、マイクロプロセッサ120cで図39の隙間距離算出処理のプログラムが実行される。
Through the above processing, the position and size of the wall, the parked vehicle, and the like existing in front of the
この隙間距離算出処理では、ステップS401で、出力用メモリ125から道路上の各物体の自車輌1側の縁の位置及び側壁の端部の位置を入力すると、ステップS402で、各物体の縁及び側壁の端部と、自車輌1の側部の延長線との間のX方向の距離を左右別々に求める。
In this gap distance calculation process, in step S401, when the position of the edge of the side of the
次いで、ステップS403へ進み、前記ステップS402で求めた各距離の最小値を左右別々に求め、ステップS404で左右それぞれの最小値を隙間距離として若干の余裕を加え、ディスプレイコントローラ126を介してディスプレイ3に数値を表示する。 Next, the process proceeds to step S403, in which the minimum value of each distance obtained in step S402 is separately obtained for the left and right sides. In step S404, the minimum value for each of the left and right sides is set as a gap distance, and a margin is added. To display the numerical value.
1 車輌
2 走行案内装置
3 ディスプレイ
10 ステレオ光学系
15 ステレオ画像処理手段
100 立体物検出手段
110 隙間距離算出手段
代理人 弁理士 伊 藤 進
DESCRIPTION OF
Attorney Attorney Susumu Ito
Claims (4)
前記立体物検出手段で検出した立体物との隙間距離を算出する隙間距離算出手段と、
前記隙間距離算出手段で算出した隙間距離に係わる情報を表示するディスプレイ装置とを備えたことを特徴とする車輌用走行案内装置。 Three-dimensional object detection means for detecting a three-dimensional object based on a captured image outside the vehicle,
Gap distance calculation means for calculating the gap distance between the three-dimensional object detected by the three-dimensional object detection means,
A display device for displaying information relating to the gap distance calculated by the gap distance calculation means.
前記立体物検出手段は、前記ステレオ画像処理手段からの距離分布の情報に対応する被写体の各部分の3次元位置を計算し、計算した3次元位置の情報を用いて複数の立体物を検出し、
前記隙間距離算出手段は、前記立体物検出手段で検出した複数の立体物の自車輌側の縁と自車輌側部の延長線との間の最近接距離を隙間距離として左右それぞれに算出することを特徴とする請求項1乃至3の何れか一に記載の車輌用走行案内装置。 A stereo image processing means for processing a stereo image pair of an object outside the vehicle imaged by an imaging system mounted on the vehicle, and obtaining a distance distribution over the entire image by a principle of triangulation from a shift amount of a corresponding position of the stereo image pair; ,
The three-dimensional object detection means calculates a three-dimensional position of each part of the subject corresponding to the distance distribution information from the stereo image processing means, and detects a plurality of three-dimensional objects using the calculated three-dimensional position information. ,
The gap distance calculation means may calculate the closest distance between the edge of the plurality of three-dimensional objects detected by the three-dimensional object detection means on the side of the own vehicle and an extension of the side of the own vehicle as a gap distance for each of the right and left sides. The travel guide device for a vehicle according to any one of claims 1 to 3, wherein:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003420060A JP3762406B2 (en) | 2003-12-17 | 2003-12-17 | Vehicle travel guidance device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003420060A JP3762406B2 (en) | 2003-12-17 | 2003-12-17 | Vehicle travel guidance device |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP33019193A Division JP3522317B2 (en) | 1993-12-27 | 1993-12-27 | Travel guide device for vehicles |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004168304A true JP2004168304A (en) | 2004-06-17 |
| JP3762406B2 JP3762406B2 (en) | 2006-04-05 |
Family
ID=32709352
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003420060A Expired - Lifetime JP3762406B2 (en) | 2003-12-17 | 2003-12-17 | Vehicle travel guidance device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3762406B2 (en) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008059323A (en) * | 2006-08-31 | 2008-03-13 | Fuji Heavy Ind Ltd | Wall detection device |
| JP2010204059A (en) * | 2009-03-06 | 2010-09-16 | Ricoh Co Ltd | Raindrop detection apparatus and on-vehicle monitoring apparatus |
| JP2012030042A (en) * | 2010-06-30 | 2012-02-16 | Panasonic Electric Works Co Ltd | Monitoring device, and program |
| US8466960B2 (en) | 2009-02-16 | 2013-06-18 | Ricoh Company, Ltd. | Liquid droplet recognition apparatus, raindrop recognition apparatus, and on-vehicle monitoring apparatus |
| WO2013121898A1 (en) * | 2012-02-14 | 2013-08-22 | 日産自動車株式会社 | Solid-object detection device |
| CN108216242A (en) * | 2016-12-14 | 2018-06-29 | 现代自动车株式会社 | For the device and method that the limited road of vehicle is controlled to travel |
| CN109522779A (en) * | 2017-09-19 | 2019-03-26 | 株式会社斯巴鲁 | Image processing apparatus |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59198377A (en) * | 1983-04-27 | 1984-11-10 | Nippon Soken Inc | Obstacle detector for vehicle |
| JPS63195045A (en) * | 1987-02-09 | 1988-08-12 | Alpine Electron Inc | On-board announciator for alarming approach of obstacle |
| JPS63314621A (en) * | 1987-06-17 | 1988-12-22 | Nissan Motor Co Ltd | Controller for self-traveling vehicle |
| JPH03266000A (en) * | 1991-01-23 | 1991-11-27 | Kansei Corp | Preceding car position detector |
| JPH05265547A (en) * | 1992-03-23 | 1993-10-15 | Fuji Heavy Ind Ltd | On-vehicle outside monitoring device |
| JPH0581775U (en) * | 1992-04-06 | 1993-11-05 | 日野自動車工業株式会社 | Radar equipment |
| JPH0583900U (en) * | 1992-04-06 | 1993-11-12 | 日野自動車工業株式会社 | Vehicle radar device |
| JPH0592900U (en) * | 1992-03-31 | 1993-12-17 | 株式会社小糸製作所 | Vehicle radar device |
-
2003
- 2003-12-17 JP JP2003420060A patent/JP3762406B2/en not_active Expired - Lifetime
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59198377A (en) * | 1983-04-27 | 1984-11-10 | Nippon Soken Inc | Obstacle detector for vehicle |
| JPS63195045A (en) * | 1987-02-09 | 1988-08-12 | Alpine Electron Inc | On-board announciator for alarming approach of obstacle |
| JPS63314621A (en) * | 1987-06-17 | 1988-12-22 | Nissan Motor Co Ltd | Controller for self-traveling vehicle |
| JPH03266000A (en) * | 1991-01-23 | 1991-11-27 | Kansei Corp | Preceding car position detector |
| JPH05265547A (en) * | 1992-03-23 | 1993-10-15 | Fuji Heavy Ind Ltd | On-vehicle outside monitoring device |
| JPH0592900U (en) * | 1992-03-31 | 1993-12-17 | 株式会社小糸製作所 | Vehicle radar device |
| JPH0581775U (en) * | 1992-04-06 | 1993-11-05 | 日野自動車工業株式会社 | Radar equipment |
| JPH0583900U (en) * | 1992-04-06 | 1993-11-12 | 日野自動車工業株式会社 | Vehicle radar device |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008059323A (en) * | 2006-08-31 | 2008-03-13 | Fuji Heavy Ind Ltd | Wall detection device |
| US8466960B2 (en) | 2009-02-16 | 2013-06-18 | Ricoh Company, Ltd. | Liquid droplet recognition apparatus, raindrop recognition apparatus, and on-vehicle monitoring apparatus |
| JP2010204059A (en) * | 2009-03-06 | 2010-09-16 | Ricoh Co Ltd | Raindrop detection apparatus and on-vehicle monitoring apparatus |
| JP2012030042A (en) * | 2010-06-30 | 2012-02-16 | Panasonic Electric Works Co Ltd | Monitoring device, and program |
| WO2013121898A1 (en) * | 2012-02-14 | 2013-08-22 | 日産自動車株式会社 | Solid-object detection device |
| JPWO2013121898A1 (en) * | 2012-02-14 | 2015-05-11 | 日産自動車株式会社 | Three-dimensional object detection device |
| CN108216242A (en) * | 2016-12-14 | 2018-06-29 | 现代自动车株式会社 | For the device and method that the limited road of vehicle is controlled to travel |
| CN108216242B (en) * | 2016-12-14 | 2022-07-05 | 现代自动车株式会社 | Apparatus and method for controlling narrow road running of vehicle |
| CN109522779A (en) * | 2017-09-19 | 2019-03-26 | 株式会社斯巴鲁 | Image processing apparatus |
| CN109522779B (en) * | 2017-09-19 | 2023-08-04 | 株式会社斯巴鲁 | Image processing apparatus and method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP3762406B2 (en) | 2006-04-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3522317B2 (en) | Travel guide device for vehicles | |
| JP3324821B2 (en) | Vehicle exterior monitoring device | |
| US5410346A (en) | System for monitoring condition outside vehicle using imaged picture by a plurality of television cameras | |
| US6734787B2 (en) | Apparatus and method of recognizing vehicle travelling behind | |
| JP6457278B2 (en) | Object detection apparatus and object detection method | |
| CN111595357B (en) | Visual interface display method and device, electronic equipment and storage medium | |
| JP4893212B2 (en) | Perimeter monitoring device | |
| JP3324859B2 (en) | Inter-vehicle distance control device | |
| JPH1139596A (en) | Outside monitoring device | |
| CN104509099B (en) | Three-dimensional body detection device and three-dimensional body detection method | |
| JPH0845000A (en) | Vehicle-to-vehicle distance controller | |
| JP2019164611A (en) | Traveling support device and computer program | |
| JPH09106500A (en) | Driving supporting device for vehicle | |
| JPH07225892A (en) | Vehicle traveling controller | |
| JP6548312B2 (en) | Image processing device | |
| JP3762406B2 (en) | Vehicle travel guidance device | |
| CN115346193A (en) | Parking space detection method and tracking method thereof, parking space detection device, parking space detection equipment and computer readable storage medium | |
| JP2010019752A (en) | Apparatus for estimating width of vehicle | |
| JP5392473B2 (en) | Vehicle driving support device | |
| JP7431108B2 (en) | image recognition device | |
| JP2005104401A (en) | Parking support device and method | |
| CN116279431A (en) | Automatic parking method based on fusion of image and ultrasonic information | |
| JP2611325B2 (en) | Road recognition device for vehicles | |
| JP2021128671A (en) | Three-dimensional object detection apparatus, in-vehicle system, and three-dimensional object detection method | |
| CN114913507A (en) | Pedestrian detection method and device based on bus tail screen and bus tail screen |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20051004 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051130 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20051227 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060112 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090120 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100120 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110120 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110120 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120120 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120120 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130120 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130120 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140120 Year of fee payment: 8 |
|
| EXPY | Cancellation because of completion of term |