GB2554996A - Dynamic positioning rock dumping module and the operating method thereof - Google Patents
Dynamic positioning rock dumping module and the operating method thereof Download PDFInfo
- Publication number
- GB2554996A GB2554996A GB1713947.8A GB201713947A GB2554996A GB 2554996 A GB2554996 A GB 2554996A GB 201713947 A GB201713947 A GB 201713947A GB 2554996 A GB2554996 A GB 2554996A
- Authority
- GB
- United Kingdom
- Prior art keywords
- fallpipe
- slider
- dynamic positioning
- control module
- module
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02D—FOUNDATIONS; EXCAVATIONS; EMBANKMENTS; UNDERGROUND OR UNDERWATER STRUCTURES
- E02D15/00—Handling building or like materials for hydraulic engineering or foundations
- E02D15/10—Placing gravel or light material under water inasmuch as not provided for elsewhere
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
- B63B35/28—Barges or lighters
- B63B35/30—Barges or lighters self-discharging
- B63B35/305—Barges or lighters self-discharging discharging by mechanical means
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Mining & Mineral Resources (AREA)
- Paleontology (AREA)
- Civil Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Transmission Devices (AREA)
- Control Of Position Or Direction (AREA)
- Earth Drilling (AREA)
Abstract
The invention relates to a dynamic rock dumping and positioning system. The dynamic rock positioning module 300 is configured on a vessel B to dump rocks or other material via a fallpipe 100. The system has a slider 200 connected to the fallpipe, a swing module 300 connected to the fallpipe and a control module 400 connected to the slider. The control module adjusts a swinging motion of the fallpipe and the slider controls a sliding motion of the fallpipe. The pipe is automatically stabilised via an active compensation which is actuated by the dynamic positioning rock dumping module. Later embodiments relate to an operating method for the dynamic positioning rock dumping system and an operating method for the dynamic positioning rock dumping system.
Description
(54) Title of the Invention: Dynamic positioning rock dumping module and the operating method thereof Abstract Title: Dynamic positioning rock dumping module and operating method (57) The invention relates to a dynamic rock dumping and positioning system. The dynamic rock positioning module 300 is configured on a vessel B to dump rocks or other material via a fallpipe 100. The system has a slider 200 connected to the fallpipe, a swing module 300 connected to the fallpipe and a control module 400 connected to the slider. The control module adjusts a swinging motion of the fallpipe and the slider controls a sliding motion of the fallpipe. The pipe is automatically stabilised via an active compensation which is actuated by the dynamic positioning rock dumping module. Later embodiments relate to an operating method for the dynamic positioning rock dumping system and an operating method for the dynamic positioning rock dumping system.

FIG 1A

FIG. ΙΑ
1/18
100

FIG. IB
2/18

FIG. 1C
3/18
403
FIG. 2A
4/18

FIG. 2B
5/18
204

FIG. 3
6/18

FIG. 4A
7/18

FIG. 4B
8/18


9/18

FIG. 4D
10/18


\\l\s

F1& 4V

FIG. 4G
13/18

fig.
14/18



*QQ

V1G.5

305
304
A10

301
303-

K j:~302
FIG. 6
16/18




FIG. 7
17/18 (A)


A vessel provides a tilt angle

FIG.8
18/18
DYNAMIC POSITIONING ROCK DUMPING MODULE AND THE OPERATING METHOD THEREOF
1. Technical Field [0001] The present invention discloses a dynamic positioning rock dumping system and the operating method thereof. Specifically, it discloses system to compensate tilt angles of a vessel form different directions, such as rolling, pitching and heaving which are caused by wind and waves on the sea.
2. Description of the Related Art [0002] For sea facilities, it is necessary to construct some bases in the seabed, such as piling or fixing, positioning scaffolds, to carry out subsequent water and surface works. In recent years, the operation of these works is for bridge, offshore operating platform and offshore wind turbine.
[0003] A stone dumping vessel or a fallpipe vessel usually plays an important role on constructing the fixed seabed base. It is well known that stones stacked on the sea bed to support part of the structure which is built underwater. The traditional method of dumping stones is divided into two different technologies. One is the hose pipe and the other is the hard pipe.
[0004] However, the quality of the dumping work will affect the stability of base directly. The traditional dumping system is unable to locate and just approximate the position where the stone should be laid. Moreover, the vessel is also vulnerable to sea currents, waves and the impact of the wind. Hence, the operation is not accurate, resulting in waste of stone or other raw materials.
SUMMARY [0005] The present invention discloses a dynamic positioning rock dumping system and the operating method thereof. The dynamic positioning rock dumping system comprises a fallpipe, a slider, a swing module and a control module.
[0006] Some embodiments of the present invention provide that the fallpipe has at least one first serration. The slider is connected to the fallpipe. The swing module is connected to the fallpipe. The control module is connected to the slider, and the control module adjusts a swinging motion of the fallpipe and the slider controls a sliding motion of the fallpipe.
[0007] The present invention further provides an embodiment which is an operating method for the dynamic positioning rock dumping system. The method comprises a step of a slider to raising a fallpipe to a gravity point of the fallpipe, and the fallpipe is perpendicular to a deck of a vessel, a step of a control module rotating the slider, the slider and the fallpipe are parallel to the deck of the vessel, and a step of the control module lifting the slider and the fallpipe upon the deck of the vessel.
[0008] In another embodiment, the operating method comprises a step of a vessel providing a tilt angle, a step of a control module sending a real-time anti-tilt signal based on the tilt angle and a step of the control module immediately adjusting a slider, a fallpipe, a swing module or the combination thereof via the real-time anti-tilt signal. Therefore, the position of the fallpipe is maintained.
BRIEF DESCRIPTION OF THE DRAWINGS [0009] FIG. 1A illustrates the structure of a vessel and a dynamic positioning rock dumping system, in accordance with some embodiments of the present invention.
[0010] FIG. IB illustrates the telescopic motion of a fallpipe, in accordance with some embodiments of the present invention.
[0011] FIG. 1C illustrates the swinging motion of a swing module, in accordance with some embodiments of the present invention.
[0012] FIG. 2 A illustrates the structure of a control module, in accordance with some embodiments of the present invention.
[0013] FIG. 2B illustrates the three-dimensional structure of a control module, in accordance with some embodiments of the present invention.
[0014] FIG. 3 illustrates the structure of a slider, in accordance with some embodiments of the present invention.
[0015] FIG. 4 A to FIG. 4H illustrate structural conformation of lifting a fallpipe 10 upon a vessel, in accordance with some embodiments of the present invention.
[0016] FIG. 5 illustrates simplified steps for lifting a fallpipe, in accordance with some embodiments of the present invention.
[0017] FIG. 6 illustrates the motion of a swing module, in accordance with some embodiments of the present invention.
[0018] FIG. 7 illustrates a flow chart of an operating method, in accordance with some embodiments of the present invention.
[0019] FIG. 8 illustrates a flow chart of another operating method, in accordance with some embodiments of the present invention.
DESCRIPTION OF THE PREFERRED EMBODIMENTS [0020] This description of the preferred embodiments mentions the vessel B. Specifically, the vessel B is a ship or a boat on the sea. In a preferred embodiment, the vessel B is a stone dumping vessel. However, the other embodiments of the present invention can also be constructed on an offshore platform.
[0021] Vessel B is preferably regarded as a stone dumping vessel in the present embodiment. The bow of vessel B is considered as the front. Stem direction is rear, and the line along the directions of the bow and the stern is the centre line. Hence, this description of the preferred embodiments illustrates the motions or the mechanism of the present embodiment in the three-dimensional space. It is generally known that the centre line is contained above the deck plane of vessel B. On the other hand, the upper or lower direction referred to below refers to the displacement of the deck plane as a boundary and perpendicular to the centre line. The swing of the left and right pendulum is considered that the vessel B is tilted per se corresponding to the centre line.
[0022] Furthermore, the locking actuator 204, telescopic actuator 301, swing actuator 302 and tilt actuator 409 in the present embodiment are hydraulic cylinders inasmuch as the heavy elements which are constructed in the present embodiment.
[0023] Please refer to FIG. 1 A. FIG. 1A illustrates the structure of a vessel and a dynamic positioning rock dumping system, in accordance with some embodiments of the present invention. In the present embodiment, the dynamic positioning rock dumping system comprises a fallpipe 100, a slider 200, a swing module 300, and a control module 400.
[0024] The fallpipe 100 has at least one first serration 101. The first serration 101 of the present embodiment is configured on both sides of the fallpipe 100. However, the configuration of the first serration 101 is not limited to two sides. The structure of the fallpipe 100 may be adjusted in accordance with the mechanism configurations of the slider 200, the claimed invention is not limited thereto.
[0025] The slider 200 is connected to the fallpipe 100. In this embodiment, the fallpipe 100 is fitted into the slider 200 via the first serration 101. The swing module 300 is connected to the fallpipe 100 and control module 400 is connected with the slider 200. The control module 400 controls the swinging motion of the fallpipe 100 (referring to FIG. 1C or FIG. 5). The slider 200 controls the sliding motion of the fallpipe 100 (Regarding to FIG. IB and FIG. 3).
[0026] Please refer to FIG. IB. FIG. IB illustrates the telescopic motion of a fallpipe, in accordance with some embodiments of the present invention. The direction indicated by the arrow Al presents the movement of the fallpipe 100 which is actuated by the slider 200. The degree of freedom of the fallpipe 100 is determined by the length of the first serration 101. Moreover, the top of the fallpipe 100 in this embodiment is provided with a funnel-shaped opening which loads the stone. The said funnel-shaped opening is also used as an insurance for preventing that the fallpipe 100 slides out of the slider 200.
[0027] Please refer to FIG. 3. FIG. 3 illustrates the structure of a slider, in accordance with some embodiments of the present invention. The slider 200 of the present embodiment comprises a holding element 201, at least one gear 202, at least one second serration 203, and at least one locking actuator 204.
[0028] The at least one gear 202 is engaged with the at least one first serration 101 which is configured in the fallpipe 100, and the at least one second serration 203 is movably engaged with the at least one first serration 101. More specifically, the second serration 203 of the present embodiment is connected to the locking actuator 204. The aforementioned locking actuator 204 may alternatively be replaced by a linear motor or the other linearly actuating elements in the other embodiments. The claimed invention is not to be limited thereto.
[0029] Therefore, when the fallpipe 100 moves in the direction of the arrow A5, it must rely on the engagement and the rotation between the first serration 101 and the gear 202. The rotational direction of the gear 202 along the arrow A4 determines whether the first serration 101 affects the movement of the fallpipe
100. On the other hand, in the present embodiment, the power source of the gear
202 is controlled by an automatic control motor such as a servo motor. In this embodiment, the locking actuator 204 is engaged with the first serration along the straight arrow A6 when the fallpipe 100 is positioned correctly via the internal movement of gear 202 and the first serration 101. The engagement between the second serration 203 and the first serration 101 determines the mobility of the fallpipe 100.
[0030] Furthermore, the abovementioned gear 202 is connected to a servo motor. The servo motor controls the slider 200 automatically thus to compensate the movement which is produced by waves. Precisely, in the present embodiment, when the vessel B moves upward, the right gear 202 rotates counterclockwise and the left gear 202 rotates clockwise. Therefore the fallpipe 100 telescopically moves in upward direction to compensate the movement of vessel B, and vice versa.
[0031] Please refer to FIG. 1C, FIG. 2A and FIG. 2B. FIG. 1C illustrates the swinging motion of a swing module, in accordance with some embodiments of the present invention. FIG. 2A illustrates the structure of a control module, in accordance with some embodiments of the present invention. FIG. 2B illustrates the three-dimensional structure of a control module, in accordance with some embodiments of the present invention.
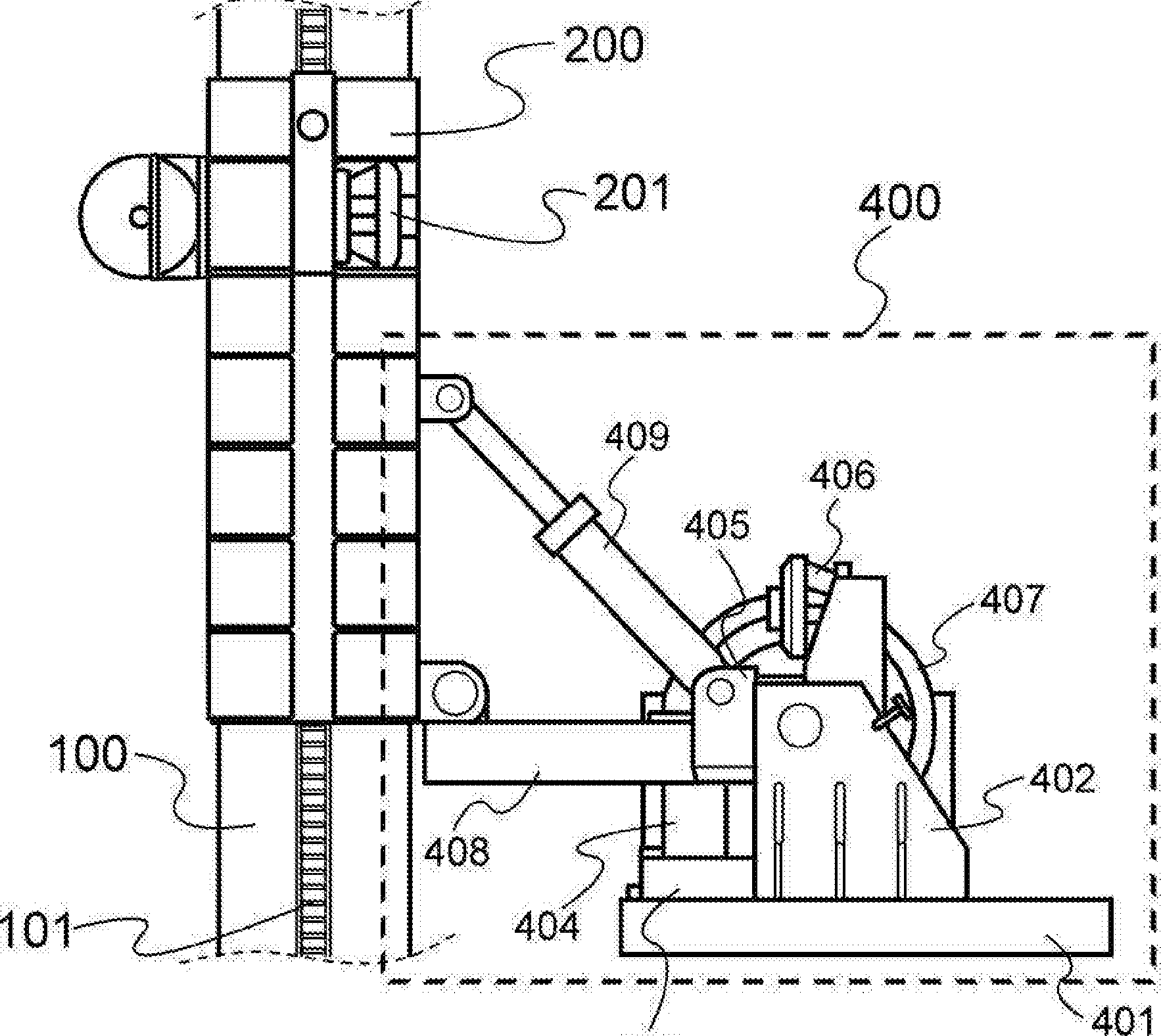
[0032] As illustrated in FIG 1C, the present embodiment is able to swing the entire fallpipe 100 in the direction of arrow A3 inasmuch as the telescopic movement of a tilt actuator 409 which is configured in the control module 400 in the direction of the arrow A2. As illustrated in FIG 2A and 2B, the control module 400 of the present embodiment comprises a base 401, a console 402, at least one slide rail 403, a stopper 404, a rotating frame 405, at least one first power source 406, at least one second power source 407, a supportive frame 408, and the tilt actuator
409.
[0033] The console 402 is connected to Base401. The at least one slide rail 403 is configured on the base 401. The stopper 404 is configured on the at least one slide rail 403. The rotating frame 405 is connected to the base 401, and the rotating frame 405 is slidably engaged with the stopper 404.
[0034] The at least one first power source 406 and the at least one second power source 407 are connected to the rotating frame 405 simultaneously, and the supportive frame 408 is connected to the rotating frame 405 and the slider 200. Furthermore, the at least one tilt actuator 409 is connected to the supportive frame 405 and the slider 200. As illustrated in FIG. 2A, the supportive frame 408 is connected to the rotating frame 405 and slider 200 via a pivot thus to facilitate the swing of the slider 200.
[0035] The pendulum model shown in FIG. 1C is achieved inasmuch as the same principle, but being performed by the at least one tilt actuator 409. When the vessel B is swung in order to the impact of waves, the control module 400 is able to correct the offset in time therefore to be accurate positioning. The fallpipe 100 will remain stable.
[0036] Please refer to FIG. 4A to FIG. 4H. FIG. 4A to FIG. 4H illustrate structural conformation of lifting a fallpipe upon a vessel, in accordance with some embodiments of the present invention. As illustrated in the FIG. 4A to FIG. 4H, they have shown that how to suspend the fallpipe 100 upon a vessel B.
[0037] As illustrated in FIG. 4A, when the fallpipe 100 needs to swing or rotate in the forward and backward directions. For instance, the aforementioned forward and backward directions are perpendicular to the direction of arrow A3 which is illustrated in FIG. 1C. The stopper 404 slides into the space of the control module 400 from the at least one slide rail 403 via the direction of the arrow A7.
In the present embodiment, the stopper 404 is an H-shaped element. Therefore the stopper 404 stops the rotating frame 405, provided the stopper 404 has not slid into the space of the control module 400. The stopper 404 restricts the swing of slider 200 and fallpipe 100 along the centre line of vessel B indirectly.
[0038] As illustrated in FIG. 4B, the rotative frame 405 rotates in the direction of arrow A8 freely when the stopper 404 has slid into the space of control module 400. The dashed line illustrated in FIG. 4C indicates the direction along the spin axis of the rotative frame 405. Thus, the direction indicated by arrow A8 is wrapping around and keeping the same radius to the dashed line illustrated in
FIG. 4C as a central axis.
[0039] The rotational power of the rotating frame 405 is supplied by the first power source 406 in the present embodiment. The first power source 406 is a motor which is combined with an internal gear, and the internal gear engages with the gears or the bearing which is connected to the gears in the rotating frame 405. It results in the spin of the rotating frame 405. In the other possible embodiments, the internal gears in the first power source 406 are also rotated by pulling a cable or a hinge indirectly. The claimed invention is not limited thereto.
[0040] Hence, the slider 200 and the fallpipe 100 is rotated by the above mechanism as shown in FIG. 4E until the fallpipe 100 is parallel to the deck plane of the vessel B which is illustrated in FIG. 4F. In the present embodiment, the motions described in FIG. 4E and FIG. 4F may spin 360° or more.
[0041] The movements shown in FIG. 4E and FIG.4F are compensated for the dynamic positioning as described above. When the vessel B swings back and forward along the centre line, the stopper 404 slides back into the space of the control module 400, causing the rotating frame 405 to drive the slider 200 and fallpipe 100 therefore to compensate the forward and backward swing offsets of the vessel B along the centre line.
[0042] The arrow A9 illustrated in FIG. 4F shows how the fallpipe 100 is lifted upon the vessel B. Therefore, the direction of the arrow A9 should be perpendicular to the centre line of the vessel B. More precisely, reference is made to the illustration of FIG. 4G. It shows that the rotating frame 405 is connected to the second power source 407, and the second power source 407 of the present embodiment is designed to lift weights. Thus the second power source 407 is a hydraulic motor in this embodiment and it is used to lift the entire fallpipe 100, slider 200, and swing module 300. In order to rotate the rotating frame 405 via the second power source 407, the use of the hydraulic motor allows the entire fallpipe 100, slider 200, and swing module 300 being lifted horizontally as the illustration in FIG 4F. As illustrated in FIG. 4H, the entire fallpipe 100, slider 200, and swing module 300 are lifted in the direction of arrow A9 and folded.
[0043] As illustrated in FIG. 5. FIG. 5 illustrates simplified steps for lifting a fallpipe, in accordance with some embodiments of the present invention. The situation shown in FIG. 4Ato FIG. 4H is schematically illustrated in the present FIG. 5. In the present embodiment, the related motion patterns and the position-compensating motion modes which are mentioned in FIG. 1, FIG. 2A to FIG. 2B, FIG. 3, FIG. 4Ato FIG. 4H and FIG. 5 are implementable via a console
402 integrated in the control module 400. The aforementioned console 402 is electrically connected to a positioning module (not shown in drawings) which comprises at least one tilt sensing element. The at least one tilt sensing element is a tilt sensor or a gyroscope. The claimed invention is not limited thereto.
[0044] The positioning module is directly configured in the console 402 or a central computer of the vessel B, the present invention is not limited thereto.
Therefore, a computer or an industrial computer of the console 402 senses the offset of the vessel B according to the tilt sensing element which is comprised in the positioning module, controlling all the components in the control module 400 automatically. In addition, the positioning module has a global positioning system per se thus it is able to track vessel B [0045] The console 402 in the present embodiment is also be switched to a manual mode to allow the staff on the vessel B to operate in a manual manner. With regard to the wiring, console 402 of the present embodiment and the other components of the control module 400, the slider 200 and the swing module 300 is directly or indirectly electrically connected via the base 401. It is considered that how to calculate the values of the compensation motion. In the present embodiment, the aforementioned values are able to be calculated by computer or industrial computer which are installed in console 402 and issue an automatic control command instantly. Furthermore, the respective parameters and the operation state of the control module 400 are also displayed on a screen, thus the staff understand the current state of operation of the present embodiment.
[0046] As illustrated in FIG. 6. FIG. 6 illustrates the motion of a swing module, in accordance with some embodiments of the present invention. The swing module 300 of the present embodiment comprises at least one telescopic actuator 301, at least one swing actuator 302, a swing pipe 303, a pivot 304, and a telescopable pipe 305.
[0047] The at least one telescopic actuator 301 simultaneously connects to the fallpipe 100 and the telescopable pipe 305. The at least one swing actuator 302 is connected to the telescopable pipe 305, and the swing pipe 303 is disposed on the telescopable pipe 305 through the pivot 304. The at least one swing actuator 302 is connected to the swing pipe 303.
[0048] Moreover, the at least one telescopic actuator 301 actuates the telescopable pipe 305 in the direction of the fallpipe 100 as shown in the direction which is indicated by the arrow A10 of FIG. 6. The at least one swing actuator 302 controls the swing of the swing pipe 303 in the direction of arrow All.
[0049] Therefore, the swing module 300 of the present embodiment may be 10 configured as described above in FIG. 1, FIG. 2 A to FIG. 2B, FIG. 3, FIG. 4 A to
FIG. 4H and FIG. 5. The compensation movement performs the function per se.
In other words, when the wind and waves are strong enough thus the movements shown in FIG. 1, FIG. 2 A to FIG. 2B, FIG. 3, FIG. 4 A to FIG. 4H and FIG. 5 are not immediately compensated, the accuracy of dumping stones will be further corrected by the mechanism shown in present FIG. 6.
[0050] One the other hand, the problems which usually occur underwater such as the undercurrent will impede the stone dumping work in specific location. However, it can be resolved without difficulty via the technique illustrated in FIG.
6.
[0051] As illustrated in FIG. 7. FIG. 7 illustrates a flow chart of an operating method, in accordance with some embodiments of the present invention. The operating method illustrated in the FIG. 7 is used to operate the embodiments which are recited in FIG. 1 to FIG. 6. First of all, step (a) shows that a slider 200 raises a fallpipe 100 to a gravity point of the fallpipe 100, and the fallpipe 100 is perpendicular to a deck of a vessel B. Step (b) shows that a control module 400 rotates the slider 200 so that the slider 200 and the fallpipe 100 are parallel to the deck of the vessel B. In the end, step (c) shows that the control module 400 lifts the slider 200 and the fallpipe 100 upon the deck of the vessel B.
[0052] The step (a) is referred to FIG. IB and FIG. 3 and the related descriptions. The step (b) is referred to the FIG. 4 A to FIG. 4F, and the step (c) is referred to the FIG. 4F to FIG. 4H. The entire embodiment described in FIG. 7 is based on the embodiment which is illustrated in FIG. 5.
[0053] As illustrated in FIG. 8. FIG. 8 illustrates a flow chart of another operating method, in accordance with some embodiments of the present invention. The operating method illustrated in the FIG. 8 is used to operate the embodiments which are recited in FIG. 1 to FIG. 6. First of all, step (A) is a vessel B providing a tilt angle. Step (B) is a control module 400 sending a real-time anti-tilt signal based on the tilt angle, and the last step (C) is the control module 400 immediately adjusting a slider 200, a fallpipe 100, a swing module 300 or the combination thereof via the real-time anti-tilt signal, and the position of the fallpipe 100 is maintained.
[0054] In the present embodiment, the tilt angle described in the step (A) is sensed by the at least one tilt sensing element in the aforementioned positioning module. Precisely, the tilt angle is the rolling, pitching and heaving of the deck of vessel B. The at least one tilt sensing element is a tilt sensor or a gyroscope. The claimed invention is not limited thereto.
[0055] The anti-tilt signal described in step (B) is generated by the control module 400. Precisely, the anti-tilt signal calculated by a computer or an industrial computer in the console 402 mentioned above. Furthermore, the information calculated in the computer or industrial computer computing in the console 402 is obtained by the positioning module. In other embodiments, it can also be obtained by a central computer configured in the vessel B. Therefore the control module 400 is allowed to read the anti-tilt signal which is able to be converted or translated by the computer or industrial computer of the console 402.
[0056] Therefore, in step (C), the control module immediately adjusting a slider, a fallpipe, a swing module or the combination thereof via the real-time anti-tilt signal which is calculated and obtained from step (B). The real-time adjustment of slider 200, fallpipe 100, swing module 300 or a combination thereof has described with reference to FIG. 1 to FIG. 6 the related description thereof.
Claims (10)
- What is claimed is:1. A dynamic positioning rock dumping system, comprising: a fallpipe, having at least one first serration; a slider, connecting to the fallpipe; a swing module, connecting to the fallpipe; and a control module, connecting to the slider;wherein the control module is configured to adjust a swinging motion of the fallpipe and the slider is configured to control a sliding motion of the fallpipe.
- 2. The dynamic positioning rock dumping system as claimed in claim 1, wherein the slider comprises:a holding element;at least one gear configured in the holding element; and at least one second serration configured in the holding element;wherein the at least one gear is engaged with the at least one first serration, and the at least one second serration is movably engaged with the at least one first serration.
- 3. The dynamic positioning rock dumping system as claimed in claim 2, wherein each of the at least one second serration connects to a locking actuator.
- 4. The dynamic positioning rock dumping system as claimed in claim 1, wherein the swing module comprises:a telescopable pipe;at least one telescopic actuator, connecting to the fallpipe and the telescopable pipe;at least one swing actuator, connecting to the telescopable pipe; and a swing pipe, connecting to the telescopable pipe via a pivot wherein the at least one swing actuator is connected to the swing pipe.
- 5. The dynamic positioning rock dumping system as claimed in claim 1, wherein the control module comprises:5 a base;a console, connecting to the base;at least one slide rail configured on the base;a stopper configured on the at least one slide rail;a rotative frame configured on the base, wherein the rotative frame is slidably10 engaged with the stopper;at least one first power source, connecting to the rotative frame; at least one second power source, connecting to the rotative frame; a supportive frame, connecting to the rotative frame and the slider; and at least one tilt actuator, connecting to the supportive frame and the slider.15
- 6. The dynamic positioning rock dumping system as claimed in claim 5, wherein the console is electrically connected to a positioning module, the positioning module comprising at least one tilt sensing element.
- 7. The dynamic positioning rock dumping system as claimed in claim 6, wherein the at least one tilt sensing element is a tilt sensor or a gyroscope.20
- 8. The dynamic positioning rock dumping system as claimed in claim 6, wherein the console further comprises a computer.
- 9. An operating method for a dynamic positioning rock dumping system as claimed in claim 1, comprising:(a) raising, by a slider, a fallpipe to a gravity point of the fallpipe, wherein the25 fallpipe is therefore perpendicular to a deck of a vessel;(b) rotating, by a control module, the slider, wherein the slider and the fallpipe are therefore parallel to the deck of the vessel; and (c) lifting, by the control module, the slider and the fallpipe upon the deck of the vessel.
- 10. An operating method for a dynamic positioning rock dumping system as 5 claimed in claim 1, comprising:(A) providing a tilt angle by a vessel;(B) sending, by a control module, a real-time anti-tilt signal based on the tilt angle;(C) adjusting, by the control module, a slider, a fallpipe, a swing module or the combination thereof based on the real-time anti-tilt signal to maintain the position of10 the fallpipe.IntellectualPropertyOfficeApplication No: GB1713947.8 Examiner: Mr Haydn Gupwell
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW105128527A TWI622691B (en) | 2016-09-02 | 2016-09-02 | A dynamic positioning rock dumping module and the operating method thereof |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| GB201713947D0 GB201713947D0 (en) | 2017-10-18 |
| GB2554996A true GB2554996A (en) | 2018-04-18 |
| GB2554996B GB2554996B (en) | 2018-10-10 |
Family
ID=60050703
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| GB1713947.8A Active GB2554996B (en) | 2016-09-02 | 2017-08-31 | Dynamic positioning rock dumping module and the operating method thereof |
Country Status (3)
| Country | Link |
|---|---|
| CN (1) | CN107794926B (en) |
| GB (1) | GB2554996B (en) |
| TW (1) | TWI622691B (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109339054A (en) * | 2018-11-30 | 2019-02-15 | 中交第三航务工程局有限公司 | A kind of oblique chute jackstone technique |
| CN110686597A (en) * | 2019-10-28 | 2020-01-14 | 中交第三航务工程局有限公司 | Three-dimensional positioning system of slant chute tube |
| CN114718073B (en) * | 2022-06-09 | 2022-09-20 | 中国海洋大学 | Underwater riprap leveling device |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IE60096B1 (en) * | 1986-06-19 | 1994-06-01 | Hollandsche Betongroep Nv | Apparatus for underwater covering of a line, such as a pipeline and/or other objects, with loose material |
| WO2009020385A1 (en) * | 2007-08-06 | 2009-02-12 | Itrec B.V. | Fallpipe stone dumping vessel |
| KR20160142983A (en) * | 2015-06-04 | 2016-12-14 | 삼성중공업 주식회사 | Vessel for offshore structure freight |
| KR20170044977A (en) * | 2015-10-16 | 2017-04-26 | 삼성중공업 주식회사 | an offshore structure |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN2500644Y (en) * | 2001-11-07 | 2002-07-17 | 张进生 | Throwing device of stone material |
| TW200806443A (en) * | 2006-07-28 | 2008-02-01 | Chung Shan Inst Of Science | Complex mechanism for gravity center and posture adjustment of robot |
| US20120055935A1 (en) * | 2010-09-06 | 2012-03-08 | Phelipe Mestre Peres | Dual compartment container |
| CN103924598B (en) * | 2013-01-10 | 2016-02-03 | 中交第一航务工程局有限公司 | Rubble leveling supporting pile leg peculiar to vessel |
| CN103332267A (en) * | 2013-07-26 | 2013-10-02 | 交通运输部北海航海保障中心青岛航标处 | Stone dumper of small beacon vessel |
| CN104674818A (en) * | 2015-02-16 | 2015-06-03 | 中交第一航务工程局有限公司 | Construction device and construction method for deepwater gravel foundation bed |
-
2016
- 2016-09-02 TW TW105128527A patent/TWI622691B/en active
- 2016-09-30 CN CN201610870583.2A patent/CN107794926B/en active Active
-
2017
- 2017-08-31 GB GB1713947.8A patent/GB2554996B/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IE60096B1 (en) * | 1986-06-19 | 1994-06-01 | Hollandsche Betongroep Nv | Apparatus for underwater covering of a line, such as a pipeline and/or other objects, with loose material |
| WO2009020385A1 (en) * | 2007-08-06 | 2009-02-12 | Itrec B.V. | Fallpipe stone dumping vessel |
| KR20160142983A (en) * | 2015-06-04 | 2016-12-14 | 삼성중공업 주식회사 | Vessel for offshore structure freight |
| KR20170044977A (en) * | 2015-10-16 | 2017-04-26 | 삼성중공업 주식회사 | an offshore structure |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107794926B (en) | 2020-02-25 |
| TWI622691B (en) | 2018-05-01 |
| GB201713947D0 (en) | 2017-10-18 |
| TW201812143A (en) | 2018-04-01 |
| GB2554996B (en) | 2018-10-10 |
| CN107794926A (en) | 2018-03-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20240017967A1 (en) | Motion compensating crane for use on an offshore vessel | |
| GB2554996A (en) | Dynamic positioning rock dumping module and the operating method thereof | |
| JP7008705B2 (en) | Offshore vessels, wave-induced motion-induced motion cranes for use in vessels, and cargo hauling methods. | |
| US10180127B2 (en) | Floating offshore wind turbine comprising an active nacelle tilt stabilization system | |
| EP2505486A1 (en) | Gangway | |
| US10322784B2 (en) | Combination of propulsion group and marine vessel, propulsion method of a marine vessel, and propulsion group for marine vessel | |
| MX2014005663A (en) | Vessel and crane with full dynamic compensation for vessel and wave motions and a control method thereof. | |
| WO2020044842A1 (en) | Control device, loading machine, and control method | |
| US20210024334A1 (en) | Crane for a wind farm installation vessel | |
| CN105102723A (en) | Pile driving guide | |
| WO2020044837A1 (en) | Loading machine control device and control method | |
| CN105951838B (en) | Underwater dumped rockfill base bed flattening device | |
| JP2014108865A (en) | Method of suppressing vibration of crane end and sea work ship | |
| JP6034561B2 (en) | Fixed point holding control device and work ship equipped with the same | |
| CN205499278U (en) | Above -water platform uses foldable propeller | |
| CN113247770B (en) | Lifting appliance angle adjusting method, lifting appliance adjusting mechanism and gantry crane | |
| CN208829148U (en) | A kind of compensation of undulation A type Gate Foundation peculiar to vessel | |
| US20210245846A1 (en) | Offshore transfer system with a docking position on a transfer vessel that comprises a motion compensated mooring element | |
| JP2024530379A (en) | Method and system for controlling the position and/or orientation of an elongated structure - Patents.com | |
| JP6178907B2 (en) | Fixed point holding control device and work ship equipped with the same | |
| CN214524307U (en) | Marine personnel transmission device convenient to retrieve | |
| EP2746213B1 (en) | Floating crane | |
| WO2021106905A1 (en) | Work machine control system, work machine, and method for controlling work machine | |
| JP2000240054A (en) | Pile driving work barge and pile driving device | |
| WO2024215194A1 (en) | Method and system for compensating motion of a suspended object |