-
HINTERGRUND DER ERFINDUNG
-
1. Gebiet der Erfindung
-
Die vorliegende Erfindung bezieht sich auf eine Motorsteuerung, die ausgelegt ist, eine Feldschwächungssteuerung eines Dauermagnetfeld-Drehmotors durch Ändern einer Phasendifferenz zwischen zwei um eine Drehachse angeordnete Rotoren durchzuführen.
-
2. Beschreibung des Stands der Technik
-
Bis jetzt ist ein Dauermagnetfeld-Drehmotor bekannt, der mit einem ersten Rotor und einem zweiten Rotor ausgestattet ist, die konzentrisch um eine Drehachse bereitgestellt sind, und der ausgelegt ist, die Feldschwächungssteuerung durch Ändern einer Phasendifferenz zwischen dem ersten Rotor und dem zweiten Rotor entsprechend einer Drehgeschwindigkeit auszuführen (siehe zum Beispiel die japanische offen gelegte Patentanmeldung
JP 2002-204 541 A ).
-
In einem solchen herkömmlichen Motor sind der erste Rotor und der zweite Rotor durch das Zwischenstück eines Elements verbunden, das sich in Radialrichtung verlagert, wenn es einer Zentrifugalkraft ausgesetzt ist. Der Motor ist derart ausgelegt, dass, wenn sich der Motor in einem Haltezustand befindet, die Magnetpole der in dem ersten Rotor angeordneten Dauermagnete und die Magnetpole der in dem zweiten Rotor angeordneten Dauermagnete in dieselbe Richtung ausgerichtet sind, was maximale magnetische Flüsse des Felds bereitstellt. Während die Motordrehgeschwindigkeit zunimmt, vergrößert sich die Phasendifferenz zwischen dem ersten Rotor und dem zweiten Rotor auf Grund einer Zentrifugalkraft, was folglich die magnetischen Flüsse des Felds verringert.
-
14 stellt einen Bereich dar, in dem das Motorfeld abgeschwächt werden muss, wobei die Ordinatenachse das Abtriebsdrehmoment Tr und die Abszissenachse die Umdrehungszahl N kennzeichnet. In 14 kennzeichnet ein Buchstabe „u” eine orthogonale Linie des Motors. Die Linie u wird durch Verbinden der Punkte gebildet, an denen eine Phasenspannung des Motors gleich einer Speisespannung wird, abhängig von einer Kombination der Umdrehungszahl und eines Abtriebsdrehmoments, wenn der Motor ohne Durchführung der Feldschwächungssteuerung betrieben wird. Ein Buchstabe X in der Figur kennzeichnet einen Bereich, in dem die Feldschwächung nicht erforderlich ist, während ein Buchstabe Y einen Bereich kennzeichnet, in dem die Feldschwächung erforderlich ist.
-
Wie in 14 dargestellt ist, wird der Bereich Y, in dem die Feldschwächung erforderlich ist, durch die Umdrehungszahl N und das Abtriebsdrehmoment Tr des Motors bestimmt. Folglich neigt bei der herkömmlichen Feldschwächungssteuerung, die nur von der Umdrehungszahl abhängt, ein Feldschwächungssteuerungsbetrag dazu, ungünstigerweise überhöht oder nicht ausreichend zu sein.
-
Grundlegend beabsichtigt die Feldschwächungssteuerung, eine elektromotorische Gegenkraft zu verringern, die in einem Anker durch die Umdrehung des Motors erzeugt wird, um so eine Ankerklemmenspannung zu hindern, größer als eine Speisespannung zu werden, wodurch es möglich ist, den Motor in einem größeren Umdrehungsbereich zu verwenden. Wenn die Phasendifferenz zwischen dem ersten Rotor und dem zweiten Rotor durch Verwenden der Umdrehungszahl des Motors oder einer Zentrifugalkraft geändert wird, ist lediglich die Umdrehungszahl der Parameter zur Änderung der Feldschwächungshöhe. Dies verhindert ungünstigerweise flexible Änderungen des steuerbaren Bereichs eines Abtriebsmoments oder einer Umdrehungszahl des Motors.
-
Bei einem Motor, der ebenfalls als Generator arbeitet, wird die Betriebsleistung durch Verwenden unterschiedlicher Feldsteuerungsbeträge für einen Antriebsbetrieb (positives Abtriebsdrehmoment) bzw. einem Energieerzeugungsbetrieb (negatives Abtriebsmoment) für dieselbe Umdrehungszahl verbessert. Ferner kann der Feldsteuerungsbetrag ungünstigerweise nicht zwischen dem Antriebsbetrieb und dem Energieerzeugungsbetrieb geändert werden, wenn die Phasendifferenz zwischen dem ersten Rotor und dem zweiten Rotor durch die Umdrehungszahl oder eine Zentrifugalkraft geändert wird.
-
ZUSAMMENFASSUNG DER ERFINDUNG
-
Die vorliegende Erfindung wurde mit Blick auf den zuvor genannten Hintergrund gemacht und es ist ein Ziel der Erfindung, eine Motorsteuerung bereitzustellen, die in der Lage ist, eine effiziente Erregungssteuerung gemäß einem Betriebszustand des Motors zu erreichen, ohne von einer Umdrehungszahl des Motors bei dem Betrieb des Motors abzuhängen, der zwei um eine Drehachse angeordnete Rotoren aufweist.
-
Zu diesem Zweck ist gemäß der vorliegenden Erfindung eine Motorsteuerung bereitgestellt, die ausgelegt ist, den Betrieb eines Dauermagnetfeld-Drehmotors mit einem ersten Rotor und einem zweiten Rotor, die mehrere durch Dauermagnete erzeugte Felder aufweisen und die um eine Drehachse angeordnet sind, durch eine Feldsteuerung zu steuern, die durch Ändern einer Rotorphasendifferenz, die die Phasendifferenz zwischen dem ersten Rotor und dem zweiten Rotor ist, durchgeführt wird. Die Feldsteuerung umfasst eine Feldschwächungssteuerung zur Verringerung der magnetischen Flüsse der Motorfelder und eine Feldstärkungssteuerung zur Vergrößerung der Flüsse der Motorfelder.
-
Eine Motorsteuerung gemäß einem ersten Gesichtspunkt der vorliegenden Erfindung beinhaltet: eine Wechselrichterschaltung zur Umwandlung von Gleichstrom, der von einer Gleichstromquelle geliefert wird, in Mehrphasenwechselstrom, der in einen Motoranker gespeist wird; einen Rotorphasendifferenzschieber zur Änderung der Rotorphasendifferenz; einen Gleichspannungswandler zur Änderung einer Ausgangsspannung der Gleichspannungsquelle; und einen Klemmenspannungserhöher, der wenigstens eine erste Verarbeitung zur Erhöhung einer Klemmenspannung, um die Rotorphasendifferenz in eine Richtung zur Verringerung der magnetischen Flüsse der Motorfelder durch den Rotorphasendifferenzschieber zu ändern, oder eine zweite Verarbeitung zur Erhöhung einer Klemmenspannung durchführt, um eine Ausgangsspannung der Gleichspannungsquelle durch den Gleichspannungswandler in dem Fall zu erhöhen, in dem der Betrag eines resultierenden Vektors von Ankerklemmenspannungen einzelner Phasen des Motors eine Sollspannung übersteigt, die festgelegt wurde, nicht größer als eine Ausgangsspannung der Gleichspannungsquelle zu sein.
-
Mit dieser Anordnung nimmt, wenn der Betrag eines resultierenden Vektors von Ankerklemmenspannungen einzelner Phasen des Motors die Sollspannung übersteigt, die Erregungshöhe des Motors durch die Wechselrichterschaltung ab und ein Abtriebsdrehmoment des Motors verringert sich entsprechend. In diesem Fall führt der Klemmenspannungserhöher daher die erste Verarbeitung zur Änderung der Rotorphasendifferenz in die Richtung aus, die magnetischen Flüsse der Motorfelder zu verringern, um so eine elektromotorische Gegenkraft des Motors zu verringern, was es ermöglicht, die Erregungshöhe des Motors zu vergrößern. Es ist ebenfalls möglich, die Erregungshöhe des Motors durch Ausführen der zweiten Verarbeitung zur Erhöhung einer Klemmenspannung zu vergrößern, um eine Ausgangsspannung der Gleichspannungsquelle durch den Klemmenspannungserhöher zu vergrößern. Die erste Verarbeitung zur Erhöhung einer Klemmenspannung und die zweite Verarbeitung zur Erhöhung einer Klemmenspannung werden durch den Klemmenspannungserhöher basierend auf dem Betrag eines resultierenden Vektors von Klemmenspannungen in dem Motor anstatt einer Umdrehungszahl des Motors durchgeführt. Dies ermöglicht es, den Motor effizient zu betreiben, indem eine erforderliche Erregungshöhe gemäß einer Betriebsbedingung des Motors sichergestellt ist.
-
Bevorzugt führt der Klemmenspannungserhöher die erste Verarbeitung zur Erhöhung einer Klemmenspannung vor der zweiten Verarbeitung zur Erhöhung einer Klemmenspannung durch, wenn der Betrag des resultierenden Vektors der Ankerklemmenspannungen der einzelnen Phasen des Motors die zuvor genannte Sollspannung übersteigt und führt danach die zweite Verarbeitung zur Erhöhung einer Klemmenspannung durch, wenn der Betrag des resultierenden Vektors der Ankerklemmenspannungen der einzelnen Phasen des Motors größer bleibt als die Sollspannung, selbst wenn die erste Verarbeitung zur Erhöhung einer Klemmenspannung ausgeführt wurde.
-
Mit dieser Anordnung führt dann in dem Fall, in dem der Betrag des resultierenden Vektors der Ankerklemmenspannungen der einzelnen Phasen des Motors die Sollspannung übersteigt, der Klemmenspannungserhöher die erste Verarbeitung zur Erhöhung einer Klemmenspannung zuerst aus, um die magnetischen Flüsse der Motorfelder zu verringern. In dem Fall, in dem die erste Verarbeitung zur Erhöhung einer Klemmenspannung den Betrag des resultierenden Vektors der Klemmenspannung in dem Motor veranlasst, gleich oder kleiner als die Sollspannung zu werden, kann die Motorerregung dann durch die Wechselrichterschaltung erhalten werden. In dem Fall unterdessen, in dem der Betrag des resultierenden Vektors der Klemmenspannung in dem Motor noch höher als die Sollspannung ist, nachdem die erste Verarbeitung zur Erhöhung einer Klemmenspannung ausgeführt wurde, wird dann die zweite Verarbeitung zur Erhöhung einer Klemmenspannung ausgeführt, um eine Ausgangsspannung der Gleichspannungsquelle zu vergrößern, um so zu ermöglichen, den Betriebsbereich des Motors zu erweitern, innerhalb dessen der Motor durch die Wechselrichterschaltung erregt werden kann.
-
Bevorzugt wird ein Betrieb des Motors basierend auf einem vorgegebenen Drehmomentsteuerwert gesteuert und der Klemmenspannungserhöher bestimmt die Ausführungsreihenfolge der ersten Verarbeitung zur Erhöhung einer Klemmenspannung und der zweiten Verarbeitung zur Erhöhung einer Klemmenspannung basierend auf einer Änderungsrate des Drehmomentsteuerwerts.
-
Mit dieser Anordnung benötigt die mechanische Verarbeitung zur Änderung der Rotorphasendifferenz durch den Rotorphasendifferenzschieber in der ersten Verarbeitung zur Erhöhung einer Klemmenspannung länger, um auf einen Änderungssteuerwert zu reagieren, als die elektrische Verarbeitung in der zweiten Verarbeitung zur Erhöhung einer Klemmenspannung, wobei eine Ausgangsspannung der Gleichspannungsquelle durch den Gleichspannungswandler geändert wird. Aus diesem Grund wird dann abhängig von einer Änderungsrate des Drehmomentsteuerwerts, wenn zum Beispiel die Änderungsrate größer ist als ein voreingestellter Referenzwert, die zweite Verarbeitung zur Erhöhung einer Klemmenspannung, die eine kleinere Reaktionszeit erfordert, zuerst ausgeführt, so dass der Erhaltung der Erregungshöhe des Motors Priorität eingeräumt werden kann. In dem Fall, in dem die Änderungsrate gleich dem Referenzwert oder kleiner ist, wird dann die erste Verarbeitung zur Erhöhung einer Klemmenspannung, die eine längere Reaktionszeit benötigt, zuerst ausgeführt, so dass der Erhaltung der Motorbetriebsleistung Priorität eingeräumt werden kann.
-
Bevorzugt bestimmt der Klemmenspannungserhöher die Ausführungsreihenfolge der ersten Verarbeitung zur Erhöhung einer Klemmenspannung und der zweiten Verarbeitung zur Erhöhung einer Klemmenspannung basierend auf einem Differenzbetrag zwischen dem Betrag des resultierenden Vektors der Ankerklemmenspannungen der einzelnen Phasen des Motors und der Sollspannung.
-
Mit dieser Anordnung wird dann abhängig von einem Differenzbetrag zwischen dem Betrag des resultierenden Vektors der Ankerklemmenspannungen der einzelnen Phasen des Motors und der Sollspannung, wenn zum Beispiel die Differenz größer als ein voreingestellter Referenzwert ist, die zweite Verarbeitung zur Erhöhung einer Klemmenspannung, die eine kleinere Reaktionszeit erfordert, zuerst ausgeführt, so dass der Erhaltung der Erregungshöhe des Motors Priorität eingeräumt werden kann. In dem Fall, in dem die Differenz gleich dem Referenzwert oder kleiner ist, wird dann die erste Verarbeitung zur Erhöhung einer Klemmenspannung, die eine längere Reaktionszeit benötigt, zuerst ausgeführt, so dass der Erhaltung der Motorbetriebsleistung Priorität eingeräumt werden kann.
-
Bevorzugt beinhaltet die Motorsteuerung einen Rotorstellungsdetektor, der eine Stellung des ersten Rotors detektiert; und eine Erregungssteuereinheit, die den Motor durch Umformung des Motors in eine Äquivalenzschaltung handhabt, basierend auf einem rotierenden Zweiphasengleichstromkoordinatensystem, das sich aus einer d-Achse, die die Richtung eines magnetischen Feldflusses angibt, und einer zu der d-Achse orthogonalen q-Achse zusammensetzt, basierend auf der Stellung des ersten Rotors, und die die Erregungshöhe eines auf jeder Achse angeordneten Ankers in der Äquivalenzschaltung steuert und dadurch die Motorerregung, wobei der Klemmenspannungserhöher wenigstens die erste Verarbeitung zur Erhöhung einer Klemmenspannung, die zweite Verarbeitung zur Erhöhung einer Klemmenspannung oder eine dritte Verarbeitung zur Erhöhung einer Klemmenspannung ausführt, wodurch die Erregungshöhe des auf der d-Achse angeordneten Ankers in der Erregungssteuerung in dem Fall vergrößert wird, in dem der Betrag eines resultierenden Vektors der Klemmenspannungen in dem Motor die Sollspannung übersteigt.
-
Mit dieser Anordnung führt der Klemmenspannungserhöher die dritte Verarbeitung zur Erhöhung einer Klemmenspannung durch, wodurch die Erregungshöhe des auf der d-Achse angeordneten Ankers zusätzlich zu der ersten Verarbeitung zur Erhöhung einer Klemmenspannung und der zweiten Verarbeitung zur Erhöhung einer Klemmenspannung vergrößert wird, was es somit ermöglicht, eine in dem Motor erzeugte elektromotorische Gegenspannung weiter zu verringern. Dies ermöglicht es, dass der Motor in einem höheren Drehbereich betrieben wird.
-
Bevorzugt führt der Klemmenspannungserhöher die erste Verarbeitung zur Erhöhung einer Klemmenspannung und die zweite Verarbeitung zur Erhöhung einer Klemmenspannung vor der dritten Verarbeitung zur Erhöhung einer Klemmenspannung in dem Fall aus, in dem der Betrag des resultierenden Vektors der Klemmenspannungen in dem Motor die Sollspannung übersteigt, und führt die dritte Verarbeitung zur Erhöhung einer Klemmenspannung in dem Fall aus, in dem der Betrag des resultierenden Vektors der Klemmenspannungen in dem Motor größer als die Sollspannung bleibt, selbst nachdem die erste Verarbeitung zur Erhöhung einer Klemmenspannung und die zweite Verarbeitung zur Erhöhung einer Klemmenspannung ausgeführt wurden.
-
Mit dieser Anordnung führt dann in dem Fall, in dem der Betrag des resultierenden Vektors der Klemmenspannungen in dem Motor die Sollspannung übersteigt, der Klemmenspannungserhöher die erste Verarbeitung zur Erhöhung einer Klemmenspannung und die zweite Verarbeitung zur Erhöhung einer Klemmenspannung vor der dritten Verarbeitung zur Erhöhung einer Klemmenspannung aus. Dies ermöglicht es zu verhindern, dass sich die Betriebsleistung des Motors auf Grund eines Anstiegs der Erregungshöhe des d-Achsen-Ankers durch die dritte Verarbeitung zur Erhöhung einer Klemmenspannung verringert.
-
Bevorzugt wird ein Betrieb des Motors basierend auf einem vorgegebenen Drehmomentsteuerwert gesteuert und der Klemmenspannungserhöher bestimmt die Ausführungsreihenfolge der ersten Verarbeitung zur Erhöhung einer Klemmenspannung, der zweiten Verarbeitung zur Erhöhung einer Klemmenspannung und der dritten Verarbeitung zur Erhöhung einer Klemmenspannung basierend auf einer Änderungsrate des Drehmomentsteuerwerts.
-
Mit dieser Anordnung wird dann abhängig von einer Änderungsrate des Drehmomentsteuerwerts, wenn zum Beispiel die Änderungsrate größer ist als ein voreingestellter Referenzwert, die zweite Verarbeitung zur Erhöhung einer Klemmenspannung oder die dritte Verarbeitung zur Erhöhung einer Klemmenspannung, die elektrische Verarbeitungen sind und eine kleinere Reaktionszeit erfordern, zuerst ausgeführt, so dass der Erhaltung der Erregungshöhe des Motors Priorität eingeräumt werden kann. In dem Fall, in dem die Änderungsrate gleich dem Referenzwert oder kleiner ist, wird dann die erste Verarbeitung zur Erhöhung einer Klemmenspannung, wodurch die Erregungshöhe des Motors verringert wird, obwohl es eine mechanische Verarbeitung ist und eine längere Reaktionszeit benötigt, zuerst ausgeführt, so dass der Erhaltung der Motorbetriebsleistung Priorität eingeräumt werden kann.
-
Bevorzugt bestimmt der Klemmenspannungserhöher die Ausführungsreihenfolge der ersten Verarbeitung zur Erhöhung einer Klemmenspannung, der zweiten Verarbeitung zur Erhöhung einer Klemmenspannung und der dritten Verarbeitung zur Erhöhung einer Klemmenspannung basierend auf dem Betrag einer Differenz zwischen dem Betrag des resultierenden Vektors der Ankerklemmenspannungen einzelner Phasen des Motors und der Sollspannung.
-
Mit dieser Anordnung wird dann abhängig von einem Differenzbetrag zwischen dem Betrag des resultierenden Vektors der Ankerklemmenspannungen einzelner Phasen des Motors und der Sollspannung, wenn zum Beispiel die Differenz größer ist als ein voreingestellter Referenzwert, die zweite Verarbeitung zur Erhöhung einer Klemmenspannung oder die dritte Verarbeitung zur Erhöhung einer Klemmenspannung, die eine kleinere Reaktionszeit erfordern, zuerst ausgeführt, so dass der Erhaltung der Erregungshöhe des Motors Priorität eingeräumt werden kann. In dem Fall, in dem die Differenz gleich dem Referenzwert oder kleiner ist, wird dann die erste Verarbeitung zur Erhöhung einer Klemmenspannung, die eine längere Reaktionszeit benötigt, zuerst ausgeführt, so dass der Erhaltung der Motorbetriebsleistung Priorität eingeräumt werden kann.
-
Eine Motorsteuerung gemäß einem zweiten Gesichtspunkt der vorliegenden Erfindung beinhaltet: eine Wechselrichterschaltung zur Umwandlung von Gleichstrom, der von einer Gleichstromquelle geliefert wird, in Mehrphasenwechselstrom, der in einen Motoranker gespeist wird; einen Rotorphasendifferenzschieber zur Änderung der Rotorphasendifferenz; einen Gleichspannungswandler zur Änderung einer Ausgangsspannung der Gleichspannungsquelle; und einen Klemmenspannungsreduzierer, der wenigstens eine erste Verarbeitung zur Reduzierung einer Klemmenspannung, um die Rotorphasendifferenz in eine Richtung zur Vergrößerung der magnetischen Flüsse der Motorfelder durch den Rotorphasendifferenzschieber zu ändern, oder eine zweite Verarbeitung zur Reduzierung einer Klemmenspannung durchführt, um eine Ausgangsspannung der Gleichspannungsquelle durch den Gleichspannungswandler in dem Fall zu verringern, in dem der Betrag eines resultierenden Vektors von Ankerklemmenspannungen einzelner Phasen des Motors kleiner als eine Sollspannung wird, die festgelegt wurde, nicht größer als eine Ausgangsspannung der Gleichspannungsquelle zu sein.
-
Mit dieser Anordnung steigt dann in dem Fall, in dem der Betrag eines resultierenden Vektors der Ankerklemmenspannungen einzelner Phasen des Motors kleiner wird als die Sollspannung, die Verlustleistung, die auftritt, wenn die Gleichspannung in der Wechselrichterschaltung in die Mehrphasenwechselspannung umgewandelt wird. In dieses Fall führt daher der Klemmenspannungsreduzierer die erste Verarbeitung zur Reduzierung einer Klemmenspannung durch Ändern der Rotorphasendifferenz aus, so dass die magnetischen Flüsse der Motorfelder vergrößert werden können, um die Ankerklemmenspannungen einzelner Phasen anzuheben. Dies wiederum ermöglicht, eine Differenz zwischen dem Betrag eines resultierenden Vektors der Ankerklemmenspannungen einzelner Phasen des Motors und der Sollspannung zu reduzieren, was folglich eine Verringerung der Verlustleistung in der Wechselrichterschaltung ermöglicht.
-
Eine Ausgangsspannung der Gleichspannungsquelle kann durch Ausführen der zweiten Verarbeitung zur Reduzierung einer Klemmenspannung durch Ändern einer Ausgangsspannung der Gleichspannungsquelle durch den Klemmenspannungsreduzierer verringert werden. Dies ermöglicht es wiederum, eine Differenz zwischen dem Betrag eines resultierenden Vektors der Ankerklemmenspannungen einzelner Phasen des Motors und der Spannung der Gleichspannungsquelle, die der Wechselrichterschaltung zugeführt wird, zu verringern, was folglich eine Verringerung der Verlustleistung in der Wechselrichterschaltung ermöglicht. Die erste Verarbeitung zur Reduzierung einer Klemmenspannung und die zweite Verarbeitung zur Reduzierung einer Klemmenspannung werden basierend auf dem Betrag eines resultierenden Vektors der Klemmenspannungen in dem Motor anstelle einer Umdrehungszahl des Motors ausgeführt. Somit ist es möglich, eine Betriebsleistungsverschlechterung des Motors gemäß einer Betriebsbedingung des Motors einzuschränken.
-
Bevorzugt führt der Klemmenspannungsreduzierer die erste Verarbeitung zur Reduzierung einer Klemmenspannung vor der zweiten Verarbeitung zur Reduzierung einer Klemmenspannung in dem Fall aus, in dem der Betrag des resultierenden Vektors der Ankerklemmenspannungen einzelner Phasen des Motors kleiner wird als die zuvor genannte Sollspannung und führt dann die zweite Verarbeitung zur Reduzierung einer Klemmenspannung in dem Fall aus, in dem der Betrag des resultierenden Vektors der Ankerklemmenspannungen einzelner Phasen des Motors kleiner bleibt als die Sollspannung, selbst nachdem die erste Verarbeitung zur Reduzierung einer Klemmenspannung ausgeführt wurde.
-
Mit dieser Anordnung führt dann in dem Fall, in dem der Betrag des resultierenden Vektors der Ankerklemmenspannungen einzelner Phasen des Motors kleiner wird als die Sollspannung, der Klemmenspannungsreduzierer die erste Verarbeitung zur Reduzierung einer Klemmenspannung zuerst aus, um die magnetischen Flüsse der Motorfelder zu vergrößern. Die Ausführung der ersten Verarbeitung zur Reduzierung einer Klemmenspannung bringt den Betrag des resultierenden Vektors der Klemmenspannungen in dem Motor nahe an die Sollspannung. Dies ermöglicht es, die Verlustleistung in der Wechselrichterschaltung zu verringern und die Erregungshöhe des Motors zu reduzieren.
-
Bevorzugt wird ein Betrieb des Motors basierend auf einem vorgegebenen Drehmomentsteuerwert gesteuert und der Klemmenspannungsreduzierer bestimmt die Ausführungsreihenfolge der ersten Verarbeitung zur Reduzierung einer Klemmenspannung und der zweiten Verarbeitung zur Reduzierung einer Klemmenspannung basierend auf einer Änderungsrate des Drehmomentsteuerwerts.
-
Mit dieser Anordnung wird dann abhängig von einer Änderungsrate des Drehmomentsteuerwerts, wenn zum Beispiel die Änderungsrate größer als ein voreingestellter Referenzwert ist, die zweite Verarbeitung zur Reduzierung einer Klemmenspannung, die eine elektrische Verarbeitung ist und eine kürzere Reaktionszeit erfordert, zuerst ausgeführt, so dass eine Betriebsbedingung der Wechselrichterschaltung sofort gemäß einer Änderung eines Abtriebsdrehmoments des Motors geändert werden kann. In dem Fall, in dem die Änderungsrate gleich dem Referenzwert oder kleiner ist, wird dann die erste Verarbeitung zur Reduzierung einer Klemmenspannung, die es ermöglicht, die Erregungshöhe des Motors zu reduzieren, obwohl sie eine mechanische Verarbeitung ist und eine längere Reaktionszeit benötigt, zuerst ausgeführt, so dass die Betriebsbedingung der Wechselrichterschaltung geändert werden kann.
-
Bevorzugt bestimmt der Klemmenspannungsreduzierer die Ausführungsreihenfolge der ersten Verarbeitung zur Reduzierung einer Klemmenspannung und der zweiten Verarbeitung zur Reduzierung einer Klemmenspannung basierend auf dem Betrag einer Differenz zwischen dem Betrag des resultierenden Vektors der Ankerklemmenspannungen einzelner Phasen des Motors und der Sollspannung.
-
Mit dieser Anordnung wird dann abhängig von dem Betrag einer Differenz zwischen dem Betrag des resultierenden Vektors der Ankerklemmenspannungen einzelner Phasen des Motors und der Sollspannung, wenn zum Beispiel die Differenz größer als ein voreingestellter Referenzwert ist, die zweite Verarbeitung zur Reduzierung einer Klemmenspannung, die eine kürzere Reaktionszeit erfordert, zuerst ausgeführt, so dass eine Betriebsbedingung der Wechselrichterschaltung sofort gemäß einer Änderung eines Abtriebsdrehmoments des Motors geändert werden kann. In dem Fall, in dem die Differenz gleich dem Referenzwert oder kleiner ist, wird dann die erste Verarbeitung zur Reduzierung einer Klemmenspannung, die es ermöglicht, die Erregungshöhe des Motors zu reduzieren, obwohl sie eine längere Reaktionszeit benötigt, zuerst ausgeführt, so dass eine Betriebsbedingung der Wechselrichterschaltung geändert werden kann.
-
KURZBESCHREIBUNG DER ZEICHNUNGEN
-
1 ist ein Anordnungsdiagramm eines bürstenlosen Gleichstrommotors, der mit einem Doppelrotor ausgestattet ist;
-
2(a) und 2(b) sind ein Anordnungsdiagramm bzw. ein erläuterndes Betriebsdiagramm eines Mechanismus zur Änderung einer Phasendifferenz zwischen einem Außenrotor und einem Innenrotor des in 1 dargestellten bürstenlosen Gleichstrommotors;
-
3(a) und 3(b) sind erläuternde Diagramme der Vorteile, die durch Änderung der Phasendifferenz zwischen dem Außenrotor und dem Innenrotor bereitgestellt werden;
-
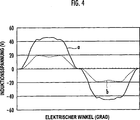
4 ist ein erläuterndes Diagramm der Vorteile, die durch Änderung der Phasendifferenz zwischen dem Außenrotor und dem Innenrotor bereitgestellt werden;
-
5 ist ein Steuerblockdiagramm einer Motorsteuerung;
-
6 ist ein Spannungszeigerdiagramm in einem d-q-Koordinatensystem;
-
7(a) ist ein erläuterndes Diagramm einer Abbildung zur Bestimmung einer Rotorphasendifferenz aus einer Induktionsspannungskonstanten und 7(b) ist eine Abbildung zur Bestimmung einer Rotorphasendifferenz aus einer Induktionsspannungskonstanten und einer Induktanz eines q-Achsen-Ankers;
-
8(a), 8(b), 8(c) und 8(d) sind erläuternde Diagramme der durch Schwächung der Felder und Vergrößerung einer Versorgungsspannung erzielten Vorteile;
-
9(a), 9(b), 8(c) und 9(d) sind erläuternde Diagramme der durch Stärkung der Felder und Verkleinerung einer Versorgungsspannung erzielten Vorteile;
-
10 ist ein Ablaufflussdiagramm zur Bestimmung der Ausführungsreihenfolge, um einen resultierenden Vektor der Ankerklemmenspannungen einzelner Phasen des Motors nahe an einen Sollspannungskreis zu bringen;
-
11 ist ein Ablaufflussdiagramm, um einen resultierenden Vektor der Ankerklemmenspannungen einzelner Phasen des Motors nahe an einen Sollspannungskreis zu bringen;
-
12 ist ein erläuterndes Diagramm einer Abbildung zur Bestimmung einer Rotorphasendifferenz aus einer Induktionsspannungskonstante;
-
13 ist ein Ablaufflussdiagramm zur Änderung einer Rotorphasendifferenz durch einen Aktor; und
-
14 ist ein erläuterndes Diagramm, das einen Bereich darstellt, in dem eine Feldschwächung in dem Motor erforderlich ist.
-
BESCHREIBUNG DER BEVORZUGTEN AUSFÜHRUNGSFORMEN
-
Eine Ausführungsform der vorliegenden Erfindung wird mit Bezug auf 1 bis 13 erläutert werden. 1 ist ein Anordnungsdiagramm eines bürstenlosen Gleichstrommotors, der mit einem Doppelrotor ausgestattet ist, 2(a) und 2(b) sind ein Anordnungsdiagramm bzw. ein erläuterndes Betriebsdiagramm eines Mechanismus zur Änderung einer Phasendifferenz zwischen einem Außenrotor und einem Innenrotor des in 1 dargestellten bürstenlosen Gleichstrommotors, 3 und 4 sind erläuternde Diagramme der Vorteile, die durch Änderung der Phasendifferenz zwischen dem Außenrotor und dem Innenrotor bereitgestellt werden, 5 ist ein Steuerblockdiagramm einer Motorsteuerung, 6 ist ein Spannungszeigerdiagramm in einem d-q-Koordinatensystem, 7 stellt erläuternde Diagramme einer Abbildung zur Bestimmung einer Rotorphasendifferenz aus einer Induktionsspannungskonstante und eine Abbildung zur Bestimmung einer Rotorphasendifferenz aus eine Induktionsspannungskonstante und einer Induktanz eines q-Achsen-Ankers dar, 8 stellt erläuternde Diagramme der durch Schwächung eines Feldes und Vergrößerung einer Versorgungsspannung erhaltenen Vorteile dar, 9 stellt erläuternde Diagramme der durch Stärkung der Felder und Verkleinerung einer Versorgungsspannung erhaltenen Vorteile dar, 10 ist ein Ablaufflussdiagramm zur Bestimmung der Ausführungsreihenfolge, um einen resultierenden Vektor der Ankerklemmenspannungen einzelner Phasen des Motors nahe an einen Sollspannungskreis zu bringen, 11 ist ein Ablaufflussdiagramm, um einen resultierenden Vektor der Ankerklemmenspannungen einzelner Phasen des Motors nahe an einen Sollspannungskreis zu bringen, 12 ist ein erläuterndes Diagramm einer Abbildung zur Bestimmung einer Rotorphasendifferenz aus einer Induktionsspannungskonstante und 13 ist ein Ablaufflussdiagramm zur Änderung einer Rotorphasendifferenz durch einen Aktor.
-
In 1 ist ein Motor 1 in der vorliegenden Ausführungsform ein bürstenloser Gleichstrommotor, der mit einem Innenrotor 11 (der einem zweiten Rotor in der vorliegenden Erfindung entspricht), der Felder von Dauermagneten 11a und 11b aufweist, die in gleichen Abständen in Umfangsrichtung angeordnet sind, einem Außenrotor 12 (der einem ersten Rotor in der vorliegenden Erfindung entspricht), der Felder von Dauermagneten 12a und 12b aufweist, die in gleichen Abständen in Umfangsrichtung angeordnet sind, und einem Stator 10 ausgestattet ist, der einen Anker 10a zur Erzeugung von Rotationsfeldern in Bezug zu dem Innenrotor 11 und dem Außenrotor 12 aufweist. Der Motor 1 wird als Antriebsquelle zum Beispiel eines Hybridfahrzeugs oder eines elektrisch betriebenen Fahrzeugs verwendet und arbeitet als Motor und Generator, wenn er in einem Hybridfahrzeug angebracht ist.
-
Der Innenrotor 11 und der Außenrotor 12 sind konzentrisch derart angeordnet, dass ihre Drehachsen beide zu einer Drehachse 2 des Motors 1 koaxial sind. In dem Innenrotor 11 sind die Dauermagnete 11a mit ihren Nordpolen der Drehachse 2 gegenüberliegend und die Dauermagnete 11b mit ihren Südpolen der Drehachse 2 gegenüberliegend abwechselnd angeordnet. Ähnlich sind in dem Außenrotor 12 die Dauermagnete 12a mit ihren Nordpolen der Drehachse 2 gegenüberliegend und die Dauermagnete 12b mit ihren Südpolen der Drehachse 2 gegenüberliegend abwechselnd angeordnet.
-
Der Motor 1 umfasst ferner einen Planetengetriebemechanismus 30, der in 2(a) dargestellt ist, um eine Rotorphasendifferenz zu ändern, die eine Phasendifferenz zwischen dem Außenrotor 12 und dem Innenrotor 11 ist. In 2(a) ist der Planetengetriebemechanismus 30 ein Einritzelplanetengetriebemechanismus, der in einem hohlen Bereich des Innenrotors 11 an seiner inneren Umfangsseite angeordnet ist. Der Planetengetriebemechanismus 30 umfasst einen ersten Zahnkranz R1, der koaxial und in einem Stück mit dem Außenrotor 12 ausgebildet ist, einen zweiten Zahnkranz R2, der koaxial und in einem Stück mit dem Innenrotor 11 ausgebildet ist, ein erstes Planetenrad 31, das mit dem ersten Zahnkranz R1 in Eingriff steht, ein zweites Planetenrad 32, das mit dem zweiten Zahnkranz R2 in Eingriff steht, ein Sonnenrad S, das ein Zwischenrad ist, das mit dem ersten Planetenrad 31 und dem zweiten Planetenrad 32 in Eingriff steht, einen ersten Planetenträger C1, der rotierend das erste Planentenrad 31 hält und der rotierend durch die Drehachse 2 gehalten wird, und einen zweiten Planetenträger C2, der rotierend das zweite Planetenrad 32 hält und der an dem Stator 10 befestigt ist.
-
In dem Planetengetriebemechanismus 30 weisen der erste Zahnkranz R1 und der zweite Zahnkranz R2 ungefähr denselben Zahnradaufbau auf und das erste Planetenrad 31 und das zweite Planetenrad 32 weisen ungefähr denselben Zahnradaufbau auf. Die Drehachse 33 des Sonnenrads S ist koaxial zu der Drehachse 2 des Motors 1 angeordnet und wird rotierend durch ein Lager 34 gehalten. Folglich ist der Planetengetriebemechanismus 30 derart aufgebaut, dass das erste Planetenrad 31 und das zweite Planetenrad 32 in Eingriff mit dem Sonnenrad S stehen und sich der Außenrotor 12 und der Innenrotor 11 im Gleichlauf drehen.
-
Ferner ist eine Drehachse 35 des ersten Planetenträgers C1 koaxial zu der Drehachse 2 des Motors 1 angeordnet und mit einem Aktor 25 verbunden. Der zweite Planetenträger C2 ist an dem Stator 10 befestigt.
-
Der Aktor 25 bewirkt hydraulisch, dass sich der erste Planetenträger C1 in Vorwärtsrichtung oder in Rückwärtsrichtung dreht oder schränkt die Drehung des ersten Planetenträgers C1 um die Drehachse 2 als Antwort auf ein von einer externen Quelle eingegebenes Steuersignal ein. Dann ändert sich, während der erste Planetenträger C1 durch den Aktor 25 gedreht wird, eine relative Lagebeziehung (Phasendifferenz) zwischen dem Außenrotor 12 und dem Innenrotor 11. Der Planentengetriebemechanismus 30 und der Aktor 25 bilden den Rotorphasendifferenzschieber in der vorliegenden Erfindung. Der Aktor 25 kann ein Aktor sein, der den ersten Planetenträger C1 elektrisch anstatt hydraulisch dreht.
-
2(b) stellt eine Beziehung zwischen den Drehgeschwindigkeiten des ersten Zahnkranzes R1, dem ersten Planetenträger C1, dem Sonnenrad S, dem zweiten Planetenträger C2 und dem zweiten Zahnkranz R2 in dem Planetengetriebemechanismus 30 dar, wobei die Ordinatenachse eine Drehgeschwindigkeit Vr angibt.
-
In 2(b) ist die Geschwindigkeit des zweiten Planetenträgers C2, der an dem Stator 10 befestigt ist, Null. Dies bedeutet, dass sich zum Beispiel, wenn sich das Sonnenrad S in Rückwärtsrichtung dreht (Vr < 0), der zweite Zahnkranz R2 und der Innenrotor 11 in Vorwärtsdrehrichtung (Vr > 0) mit einer Geschwindigkeit basierend auf einem Übersetzungsverhältnis g2 relativ zu dem zweiten Zahnkranz R2 drehen.
-
Wenn der Aktor 25 nicht in Betrieb ist (wenn der erste Planetenträger C1 nicht durch den Aktor 25 gedreht wird), ist die Drehgeschwindigkeit des ersten Planetenträgers C1 Null. Folglich drehen sich der erste Zahnkranz R1 und der Außenrotor 12 in Rückwärtsrichtung relativ zu dem sich drehenden Sonnenrad S mit einer Geschwindigkeit basierend auf dem Übersetzungsverhältnis g1 des Sonnenrads S relativ zu dem ersten Zahnkranz R1. Das Übersetzungsverhältnis g1 und das Übersetzungsverhältnis g2 sind so festgelegt, dass sie ungefähr gleich sind (g1 g2), so dass sich der Innenrotor 11 und der Außenrotor 12 im Gleichlauf drehen, womit folglich die Phasendifferenz zwischen dem Innenrotor 11 und dem Außenrotor 12 auf einem konstanten Wert gehalten wird.
-
Wenn der Aktor 25 in Betrieb ist (wenn der erste Planetenträger C1 durch den Aktor 25 gedreht wird), drehen sich der erste Zahnkranz R1 und der Außenrotor 12 in Rückwärtsrichtung relativ zu dem sich drehenden Sonnenrad S mit einer Geschwindigkeit, die durch Vergrößern oder Verkleinern einer Geschwindigkeit basierend auf dem Übersetzungsverhältnis g1 des Sonnenrads S relativ zu dem ersten Zahnkranz R1 durch den Drehumfang des ersten Planetenträgers C1 erhalten wird. Dies ändert die Phasendifferenz zwischen dem Außenrotor 12 und dem Innenrotor 11.
-
Der Aktor 25 ist derart aufgebaut, dass er in der Lage ist, den ersten Planetenträger C1 in Vorwärtsrichtung oder Rückwärtsrichtung um wenigstens einen mechanischen Winkel β (Grad) = (180/P) × g1/(1 + g1) relativ zu dem Übersetzungsverhältnis g1 des Sonnenrads S bezüglich des ersten Zahnkranzes R1 und der Anzahl an Polpaaren P des Motors 1 zu drehen.
-
Deshalb kann die Phasendifferenz zwischen dem Außenrotor 12 und dem Innenrotor 11 in Richtung eines Voreilwinkels oder eines Nacheilwinkels innerhalb des Bereichs von wenigstens 180 Grad im Sinne des elektrischen Winkels geändert werden. Der Motor 1 kann, sofern angebracht, zwischen einem Feldschwächungsbetrieb, bei dem die Dauermagnete 12a und 12b des Außenrotors 12 und die Dauermagnete 11a und 11b des Innenrotors 11 mit denselben Polen einander gegenüberliegend angeordnet sind, und einem Feldstärkungsbetrieb, bei dem die Dauermagnete 12a und 12b des Außenrotors 12 und die Dauermagnete 11a und 11b des Innenrotors 11 mit entgegengesetzten Polen einander gegenüberliegend angeordnet sind, eingestellt werden.
-
3(a) stellt den Feldstärkungsbetrieb dar. Die Richtungen der magnetischen Flüsse Q2 der Dauermagnete 12a und 12b des Außenrotors 12 und die Richtungen der magnetischen Flüsse Q1 der Dauermagnete 11a und 11b des Innenrotors 11 sind dieselben, die zu großen zusammengesetzten magnetischen Flüssen Q3 führen. Unterdessen stellt 3(b) den Feldschwächungsbetrieb dar. Die Richtungen der magnetischen Flüsse Q2 der Dauermagnete 12a und 12b des Außenrotors 12 und die Richtungen der magnetischen Flüsse Q1 der Dauermagnete 11a und 11b des Innenrotors 11 sind einander entgegengerichtet, was dazu führt, dass die zusammengesetzten magnetischen Flüsse Q3 kleiner sind.
-
4 stellt einen Graphen dar, der die Induktionsspannungen vergleicht, die in einem Anker des Stators 10 erzeugt werden, wenn der Motor 1 mit einer vorgegebenen Umdrehungszahl in der in 3(a) dargestellten Betriebsart bzw. in der in 3(b) dargestellten Betriebsart betrieben wird, wobei die Ordinatenachse die Induktionsspannung (V) und die Abszissenachse den elektrischen Winkel (Grad) angibt. In dem Graph gibt „a” die in 3(a) dargestellte Betriebsart an (die Feldstärkungsbetriebsart), während „b” die in 3(b) dargestellte Betriebsart angibt (die Feldschwächungsbetriebsart). 4 zeigt, dass eine Änderung der Phasendifferenz zwischen dem Außenrotor 12 und dem Innenrotor 11 eine wesentliche Änderung einer erzeugten Induktionsspannung verursacht.
-
Folglich kann die Induktionsspannungskonstante Ke des Motors 1 durch Vergrößern oder Verkleinern der magnetischen Flüsse der Felder durch Ändern der Phasendifferenz zwischen dem Außenrotor 12 und dem Innenrotor 11 geändert werden. Dies ermöglicht es, einen Betriebsbereich bezüglich des Abtriebs und der Umdrehungszahl des Motors 1 zu erweitern, verglichen mit einem Fall, in dem die Spannungskonstante Ke konstant ist. Überdies kann die Betriebsleistung des Motors 1 gesteigert werden, da sich der Kupferverlust des Motors 1 verringert, verglichen mit einem Fall, in dem die Feldschwächungssteuerung durch Erregung des auf der d-Achse (Feldachse) angeordneten Ankers durch d-q-Koordinatenumwandlung durchgeführt wird, was gewöhnlich zur Motorsteuerung eingesetzt wird.
-
In 5 bis 13 wird nun die Motorsteuerung in Übereinstimmung mit der vorliegenden Erfindung erläutert. Die in 5 dargestellte Motorsteuerung (hierin nachstehend einfach als „die Steuerung” bezeichnet) formt den Motor 1 in eine äquivalente Schaltung basierend auf einem rotierenden Zweiphasengleichstromkoordinatensystem um, in dem die Feldrichtung durch die d-Achse angegeben wird, während die zu der d-Achse orthogonale Richtung durch die q-Achse angegeben wird. Die Steuerung regelt die Erregungshöhe des Motors 1 derart, dass ein Drehmoment basierend auf einem Drehmomentsteuerwert Tr_c, der von einer externen Quelle erhalten wird, von dem Motor 1 abgegeben wird.
-
Die Steuerung ist eine elektrische Einheit, die aus einer CPU, Speicher und dergleichen zusammengesetzt ist und beinhaltet einen Stromsteuerwertermittler 60, der einen Steuerwert Id_c eines dem auf der d-Achse angeordneten Anker zuzuführenden Stroms (hierin nachstehend als „der d-Achsen-Strom” bzw. „der d-Achsen-Anker” bezeichnet) und einen Steuerwert Iq_c eines dem auf der q-Achse angeordneten Anker zuzuführenden Stroms (hierin nachstehend als „der q-Achsen-Strom” bzw. „der q-Achsen-Anker” bezeichnet) basierend auf einem Drehmomentsteuerwert Tr_c und einem Schätzwert θd_e einer Phasendifferenz zwischen dem Außenrotor 12 und dem Innenrotor 11 (Rotorphasendifferenz) des Motors 1 ermittelt, einen Dreiphasen/dq-Umwandler 75, der einen d-Achsen-Stromerfassungswert Id_s und einen q-Achsen-Stromerfassungswert Iq_s durch Dreiphasen/dq-Umwandlung basierend auf den Stromerfassungssignalen, die durch Strommessgeber 70 und 71 ermittelt werden, aus denen unerwünschte Bestandteile durch einen Bandpassfilter 72 entfernt wurden, und einem Rotorwinkel θr des Außenrotors 12, der durch einen Messwandler 73 (der dem Rotorstellungsdetektionsmittel in der vorliegenden Erfindung entspricht) ermittelt wird, berechnet, eine Erregungssteuereinheit 50 (die dem Erregungssteuermittel in der vorliegenden Erfindung entspricht), die einen Steuerwert Vd_c einer Spannung zwischen den Klemmen des d-Achsen-Ankers (hierin nachstehend als „die d-Achsen-Spannung” bezeichnet) und einen Steuerwert Vq_c einer Spannung zwischen den Klemmen des q-Achsen-Ankers (hierin nachstehend als „die q-Achsen-Spannung” bezeichnet) derart ermittelt, dass eine Differenz ΔId zwischen dem Steuerwert Id_c und dem Erfassungswert Id_s des d-Achsen-Stroms und eine Differenz ΔIq zwischen dem Steuerwert Iq_c und dem Erfassungswert Iq_s des q-Achsen-Stroms verringert wird, einen rθ-Umwandler 61, der den Steuerwert Vd_c der d-Achsen-Spannung und den Steuerwert Vq_c der q-Achsen-Spannung in einen Teil eines Betrags V1 und eines Winkels θ umwandelt, und einen PWM-Rechner 62, der die Teile des Betrags V1 und des Winkels θ durch PWM-Steuerung in eine Dreiphasenwechselspannung (U, V, W) umwandelt, wobei der PWM-Rechner 62 eine Funktion der Wechselrichterschaltung in der vorliegenden Erfindung beinhalten.
-
Die Steuerung ist ferner ausgestattet mit einem Konstantenrechner 63, der die Induktionsspannungskonstante Ke des Motors 1 und die Induktanz Lq des q-Achsen-Ankers basierend auf dem d-Achsen-Spannungssteuerwert Vd_c, dem q-Achsen-Spannungssteuerwert Vq_c, dem d-Achsen-Stromerfassungswert Id_s, dem q-Achsen-Stromerfassungswert Iq_s und einem Winkelgeschwindigkeitserfassungswert ω_s des Motors 1 (erfasst durch einen Winkelgeschwindigkeitsdetektor, der nicht dargestellt ist) berechnet, einem Rotorphasendifferenzschätzer 64, der einen Schätzwert θd_e der Rotorphasendifferenz basierend auf der Induktionsspannungskonstanten Ke und der Induktanz Lq des q-Achsen-Ankers ermittelt, einem Sollspannungskreisrechner 90, der einen Radius Vp_soll eines Sollspannungskreises aus einer Versorgungsspannung Vdc einer Gleichspannungsquelle 100, die dem PWM-Rechner 62 Gleichstrom zuführt, berechnet, was später erläutert werden wird, einem Ist-Spannungskreisrechner 92, der einen Radius Vp eines tatsächlichen Spannungskreises aus einem d-Achsen-Spannungssteuerwert Vd_c und einem q-Achsen-Spannungssteuerwert Vq_c berechnet, was später erläutert werden wird, einem Induktionsspannungskonstantensteuerwertermittler 93, der einen Steuerwert Ke_c einer Induktionsspannungskonstanten basierend auf einer Differenz ΔVp zwischen Vp_soll und Vp ermittelt, einem Rotorphasendifferenzerfasser 95, der eine Rotorphasendifferenz θd_c1, die mit einem Induktionsspannungskonstantensteuerwert Ke_c verknüpft ist, erfasst und einem Rotorphasendifferenzsteuerwertermittler 97, der einen Rotorphasendifferenzsteuerwert θd_c2 basierend auf einer Differenz θd zwischen θd_c1 und dem Schätzwert θd_e einer Rotorphasendifferenz ermittelt.
-
Die Steuerung beinhaltet ferner einen Gleichspannungssteuerwertermittler 120, der einen Ausgangsspannungssteuerwert Vdc_c einer Gleichspannungsquelle 100 basierend auf der Differenz ΔVp zwischen Vp_soll und Vp und dem Induktionsspannungskonstantensteuerwert Ke_c ermittelt, einen Feldschwächungsstromkorrekturwertrechner 121, der einen Feldschwächungsstromkorrekturwert ΔId_vol basierend auf dem Ausgangsspannungssteuerwert Vdc_c und der Differenz zwischen dem durch einen Subtrahierer 125 berechneten Vdc_c und einer durch einen Spannungsmessgeber 103 erfassten Ausgangsspannung Vdc der Gleichspannungsquelle 100 berechnet, und einen Drehmomentreaktionsermittler 110, der die Zeitpunkte zur Ansteuerung des Induktionsspannungskonstantensteuerwertermittlers 93, des Gleichspannungssteuerwertermittlers 120 und des Feldschwächungsstromkorrekturwertrechners 121 basierend auf dem Drehmomentsteuerwert Tr_c und der Differenz ΔVp zwischen Vp_soll und Vp ermittelt.
-
Die Gleichspannungsquelle 100 ist aus einer Batterie 102 und einem Gleichspannungswandler 101 zusammengesetzt. Der Gleichspannungswandler 101 entspricht dem Gleichspannungsänderungsmittel in der vorliegenden Erfindung. Ferner bilden der Spannungsmessgeber 103, der Sollspannungskreisrechner 90, der Ist-Spannungskreisrechner 92, der Subtrahierer 91, der Drehmomentreaktionsermittler 110, der Induktionsspannungskonstantensteuerwertermittler 93, der Gleichspannungssteuerwertermittler 120, der Feldschwächungsstromkorrekturwertrechner 121, ein Addierer 51, der Rotorphasendifferenzerfasser 95, ein Subtrahierer 96 und der Rotorphasendifferenzsteuerwertermittler 97 die Klemmenspannungserhöhungsmittel und die Klemmenspannungsreduzierungsmittel in der vorliegenden Erfindung.
-
Die Erregungssteuereinheit 50 beinhaltet den Addierer 51, der einen Korrekturwert ΔId_vol zu dem d-Achsen-Stromsteuerwert Id_c addiert, einen Subtrahierer 52, der eine Differenz ΔId zwischen dem d-Achsen-Stromsteuerwert Id_ca, zu dem der Korrekturwert ΔId_vol addiert wurde, und einem Erfassungswert Id_s des d-Achsen-Stroms berechnet, eine d-Achsen-Stromsteuereinheit 53, die eine d-Achsen-Differenzspannung ΔVd zur Erzeugung der Differenz ΔId berechnet, eine Entstörungssteuereinheit 56, die eine Komponente (Entstörungskomponente) zur Aufhebung der Einflüsse elektromotorischer Geschwindigkeitskräfte berechnet, die einander zwischen der d-Achse und der q-Achse überlagern, basierend auf dem d-Achsen-Stromsteuerwert Id_c und dem q-Achsen-Stromsteuerwert Iq_c, einen Subtrahierer 54, der die durch die Entstörungssteuereinheit 56 berechnete Entstörungskomponente von der d-Achsen-Differenzspannung ΔVd subtrahiert, einen Subtrahierer 55, der die Differenz ΔIq zwischen dem Steuerwert Iq_c und dem Erfassungswert Iq_s des q-Achsen-Stroms berechnet, eine q-Achsen-Stromsteuereinheit 57, die eine q-Achsen-Differenzspannung ΔVq zur Erzeugung der Differenz ΔIq berechnet und einen Addierer 58, der die Entstörungskomponente zu der q-Achsen-Differenzspannung ΔVq addiert.
-
6 stellt eine Beziehung zwischen Strom und Spannung in dem d-q-Koordinatensystem dar, wobei die Ordinatenachse die q-Achse (Drehmomentachse) kennzeichnet und die Abszissenachse die d-Achse (Feldachse) kennzeichnet. In der Figur kennzeichnet C einen Sollspannungskreis, dessen Radius Vp_soll (entspricht einer Sollspannung in der vorliegenden Erfindung) durch den Sollspannungskreisrechner 90 berechnet wird. Vp_soll ist zum Beispiel auf Vdc × 0,5 oder Vdc/61/2 basierend auf einer sinusförmigen Modulation festgelegt.
-
Die Steuerung steuert die Rotorphasendifferenz des Motors 1, eine Ausgangsspannung der Gleichspannungsquelle 100 und den d-Achsen-Strom derart, dass der resultierende Vektor V der Spannung Vd zwischen den Klemmen des d-Achsen-Ankers und der Spannung Vq zwischen den Klemmen des q-Achsen-Ankers (der Betrag des resultierenden Vektors V liefert den Radius eines Ist-Spannungskreises) den Umfang des Sollspannungskreises C zeichnet. In der Figur bezeichnet E eine durch die Umdrehung des Motors 1 in dem q-Achsen-Anker erzeugte elektromotorische Gegenkraft, ω bezeichnet eine Winkelgeschwindigkeit des Motors 1, R bezeichnet den Widerstand des d-Achsen-Ankers und des q-Achsen-Ankers, Lq bezeichnet eine Induktanz des q-Achsen-Ankers, Ld bezeichnet eine Induktanz des d-Achsen-Ankers, Vd bezeichnet eine d-Achsen-Spannung, Vq bezeichnet eine q-Achsen-Spannung, Id bezeichnet den d-Achsen-Strom und Iq bezeichnet den q-Achsen-Strom.
-
Hinsichtlich der in 6 dargestellten Komponenten auf der q-Achse gilt die durch den Ausdruck (1) dargestellte unten angegebene Beziehung; daher kann die Induktionsspannungskonstante Ke des Motors 1 aus dem unten angegebenen Ausdruck (2) berechnet werden: Ke·ω + R·Iq = Vq – ω·Ld·Id (1), wobei Ke: Induktionsspannungskonstante; ω: Winkelgeschwindigkeit des Motors; R: Widerstand des q-Achsen-Ankers und des d-Achsen-Ankers; Iq: q-Achsen-Strom; Vq: Spannung zwischen den Klemmen des q-Achsen-Ankers; Ld: Induktanz des d-Achsen-Ankers; und Id: d-Achsen-Strom. Ke = Vq – ω·Ld·Id – R·Iq / ω (2)
-
Hinsichtlich der in 6 dargestellten Komponenten auf der d-Achse gilt die durch den Ausdruck (3) dargestellte unten angegebene Beziehung; daher kann die Induktanz Lq des q-Achsen-Ankers aus dem unten angegebenen Ausdruck (4) berechnet werden: Vd = R·Id – ω·Lq·Iq (3), Lq = R·Id – Vd / ω·Iq (4).
-
Der Konstantenrechner 63 setzt die q-Achsen-Steuerspannung Vq_c, den Winkelgeschwindigkeitserfassungswert ω_s des Motors 1, den d-Achsen-Stromerfassungswert Id_s und den q-Achsen-Stromerfassungswert Iq_s in Vq, ω, Id bzw. Iq des obigen Ausdrucks (2) ein, um die Induktionsspannungskonstante Ke zu berechnen. Der Konstantenrechner 63 setzt ebenfalls den d-Achsen-Stromerfassungswert Id_s, den d-Achsen-Spannungssteuerwert Vd_c, den Winkelgeschwindigkeitserfassungswert ω_s des Motors 1 und den q-Achsen-Stromerfassungswert Iq_s in Id, Vd, ω bzw. Iq des obigen Ausdrucks (4) ein, um die Induktanz Lq des q-Achsen-Ankers zu berechnen.
-
Der Widerstand R des d-Achsen-Ankers und des q-Achsen-Ankers in dem oben angegebenen Ausdruck (2) und Ausdruck (4) nimmt vorgegebene feste Werte an. Die Induktanz Ld des d-Achsen-Ankers in Ausdruck (2) kann einen vorgegebenen festen Wert annehmen; es verringert sich jedoch die Induktanz Ld des d-Achsen-Ankers, während eine Rotorphasendifferenz ansteigt, so dass die Induktanz Ld einen Schätzwert annehmen kann, der bewirkt, dass sich die Induktanz Id verringert, während der Rotorphasendifferenzsteuerwert θd_c ansteigt.
-
Dann ermittelt der Rotorphasendifferenzschätzer 64 einen Schätzwert θd_e einer Rotorphasendifferenz basierend auf der Induktionsspannungskonstanten Ke und der Induktanz Lq des q-Achsen-Ankers, die durch den Konstantenrechner 63 berechnet werden. Wenn sich die Rotorphasendifferenz ändert, dann ändern sich die Induktionsspannungskonstante Ke des Motors 1 und die Induktanz Lq des q-Achsen-Ankers entsprechend.
-
Somit wendet der Rotorphasendifferenzschätzer 64 die Induktionsspannungskonstante Ke und die q-Achsen-Ankerinduktanz Lq, die durch den Konstantenrechner 63 berechnet worden sind, auf eine in 7(b) dargestellte Korrespondenzabbildung von Ke und Lq/θd an, um eine zugehörige Phasendifferenz θd zu erhalten und bestimmt die Phasendifferenz θd als den Schätzwert θd_e der Phasendifferenz zwischen dem Außenrotor 12 und dem Innenrotor 11.
-
Die Korrespondenzabbildung von Ke und Lq/θd wird basierend auf Experimentaldaten oder Computersimulationen angefertigt und im Voraus in einem Speicher (nicht dargestellt) gespeichert. Die durch den Konstantenrechner 63 berechnete Induktionsspannungskonstante Ke könnte auf die in 7(a) dargestellte Ke/θd-Korrespondenzabbildung angewendet werden, um θd_e zu bestimmen; die Schätzgenauigkeit einer Rotorphasendifferenz kann jedoch durch Verwenden der Induktanz Lq des q-Achsen-Ankers zusätzlich zur Induktionsspannungskonstanten Ke verbessert werden, um den Schätzwert θd_e einer Rotorphasendifferenz zu bestimmen.
-
Dann wendet der Stromsteuerwertermittler 60 den Drehmomentsteuerwert Tr_c und den Schätzwert θd_e einer Rotorphasendifferenz auf eine Abbildung von Tr, θd/Id und Iq an, die im Voraus in einem Speicher gespeichert wurde, um das zugehörige Id und Iq zu erhalten und bestimmt die erhaltenen Id und Iq als einen d-Achsen-Stromsteuerwert Id_c bzw. einen q-Achsen-Stromsteuerwert Id_q. Somit ermöglicht die Verwendung des Schätzwerts θd_e einer Rotorphasendifferenz, den d-Achsen-Stromsteuerwert Id_c und den q-Achsen-Stromsteuerwert Iq_c zu bestimmen, die eine tatsächliche Änderung des magnetischen Feldflusses des Motors 1 widerspiegeln. Somit können Abtriebsdrehmomente des Motors 1 basierend auf dem Drehmomentsteuerwert Tr_c genau gesteuert werden.
-
In 8 wird nun eine Erläuterung der Vorteile gegeben, die durch Änderung einer Rotorphasendifferenz, einer Ausgangsspannung der Gleichspannungsquelle 100 und des d-Achsen-Stroms derart erzielt werden, dass ein resultierender Vektor V den Umfang des Sollspannungskreises C mit Vp_soll als seinem Radius zeichnet, wenn der Betrag Vp des resultierenden Vektors V einer Spannung zwischen den Klemmen des d-Achsen-Ankers und einer Spannung zwischen den Klemmen des q-Achsen-Ankers größer als Vp_soll ist (Vp_soll < Vp).
-
8(a) stellt einen resultierenden Vektor V dar, der außerhalb des Sollspannungskreises C liegt. In diesem Fall wird die Erregungshöhe des Motors 1 von dem PWM-Rechner 62 begrenzt, was die Erregungssteuerung des Motors 1 verhindert. Um dies zu handhaben, wird die erste Verarbeitung zur Erhöhung einer Klemmenspannung ausgeführt, um die Rotorphasendifferenz θd in Richtung der Verringerung der magnetischen Flüsse der Felder (in die Richtung zur Feldschwächung durch Erhöhen einer Rotorphasendifferenz) zu ändern. Somit verringert sich die Induktionsspannungskonstante Ke des Motors 1 und die in dem q-Achsen-Anker erzeugte elektromotorische Gegenkraft E nimmt um einen Betrag entsprechend der Verringerung der Induktionsspannungskonstanten Ke ab. Folglich nähert sich der resultierende Vektor V dem Umfang des Sollspannungskreises C, wie in 8(b) dargestellt ist.
-
Als nächstes wird die zweite Verarbeitung zur Erhöhung einer Klemmenspannung ausgeführt, um die Ausgangsspannung Vdc der Gleichspannungsquelle 100 zu erhöhen. Dies vergrößert das durch den Sollspannungskreisrechner 90 berechnete Vp_soll, was dazu führt, dass sich der Sollspannungskreis C ausweitet, wie in 8(c) dargestellt ist, so dass sich der resultierende Vektor V dem Sollspannungskreis C weiter nähert.
-
Dann wird die dritte Verarbeitung zur Erhöhung einer Klemmenspannung ausgeführt, um den d-Achsen-Strom zu erhöhen. Dies führt dazu, dass der resultierende Vektor V den Umfang des Sollspannungskreises C erreicht, wie in 8(d) dargestellt ist. Somit kann die Erregungshöhe des Motors 1 von dem PWM-Rechner 62 vergrößert werden, indem der resultierende Vektor V nahe an den Sollspannungskreis C gebracht wird, was es ermöglicht, die Beschränkung der Erregungssteuerung des Motors 1 zu umgehen.
-
In 9 wird nun eine Erläuterung der Vorteile gegeben, die durch Änderung einer Rotorphasendifferenz und einer Ausgangsspannung der Gleichspannungsquelle 100 derart erzielt werden, dass ein resultierender Vektor V den Umfang des Sollspannungskreises C mit Vp_soll als seinem Radius zeichnet, wenn der Betrag Vp des resultierenden Vektors V einer Spannung zwischen den Klemmen des d-Achsen-Ankers und einer Spannung zwischen den Klemmen des q-Achsen-Ankers kleiner als Vp_soll ist (Vp < Vp_soll).
-
9(a) stellt einen resultierenden Vektor V dar, der innerhalb des Sollspannungskreises C liegt. In diesem Fall erleidet der PWM-Rechner 62 einen erhöhten Leistungsverlust auf Grund des Schaltens der Gleichspannung Vdc. Um dies zu handhaben, führt die Steuerung die erste Verarbeitung zur Reduzierung einer Klemmenspannung aus, um so die Rotorphasendifferenz θd in Richtung der Erhöhung der magnetischen Flüsse der Felder (in die Richtung zur Feldstärkung durch Verringern einer Rotorphasendifferenz) zu ändern. Somit vergrößert sich die Induktionsspannungskonstante Ke des Motors 1 und die in dem q-Achsen-Anker erzeugte elektromotorische Gegenkraft E nimmt um einen Betrag entsprechend der Vergrößerung der Induktionsspannungskonstanten Ke zu. Folglich nähert sich der resultierende Vektor V dem Umfang des Sollspannungskreises C, wie in 9(b) dargestellt ist.
-
Als nächstes führt die Steuerung die zweite Verarbeitung zur Reduzierung einer Klemmenspannung aus, um so die Ausgangsspannung Vdc der Gleichspannungsquelle 100 zu verringern. Dies verkleinert das durch den Sollspannungskreisrechner 90 berechnete Vp_soll, was dazu führt, dass sich der Sollspannungskreis C verkleinert, wie in 9(c) dargestellt ist, so dass sich der resultierende Vektor V dem Sollspannungskreis C weiter nähert und den Umfang des Sollspannungskreises C erreicht.
-
Somit kann der durch das Schalten der Gleichspannung Vdc hervorgerufene Leistungsverlust in dem PWM-Rechner 62 verringert werden, indem der resultierende Vektor V nahe an den Sollspannungskreis C gebracht wird. Außerdem wird der Wechselanteil des Stroms verringert, der dem Strom überlagert ist, der dem Motor zugeführt wird, einhergehend mit einer Verringerung des in dem Motor 1 erzeugten Kupferverlusts. Zusätzlich verringert sich die Überlagerung von Hochfrequenzströmen, was es ermöglicht, einen Vorteil eines in dem Motor 1 erzeugten verringerten Eisenverlusts zu erzielen.
-
In 10 wird nun eine Erläuterung der Verarbeitung zur Steuerung des Betriebs des Induktionsspannungskonstantensteuerwertermittlers 93, des Gleichspannungssteuerwertermittlers 120 und des Feldschwächungsstromkorrekturwertrechners 121 durch den Drehmomentreaktionsermittler 110 gegeben.
-
Der Drehmomentreaktionsermittler 110 ermittelt in SCHRITT 10, ob eine Änderungsrate ΔTr_c (zum Beispiel durch Berechnen der Änderungsrate Tr_c zwischen aufeinanderfolgenden Steuerzyklen der Steuerung) des Drehmomentsteuerwerts Tr_c nicht größer als ein vorgegebener Referenzwert ΔTr_limit ist. In dem Fall, in dem ΔTr_c kleiner ist als ΔTr_limit (ΔTr_c < ΔTr_limit), verzweigt der Drehmomentreaktionsermittler 110 dann nach SCHRITT 20, um eine Betätigungskennzeichnung F1 des Induktionsspannungskonstantensteuerwertermittlers 93, eine Betätigungskennzeichnung F2 des Gleichspannungssteuerwertermittlers 120 und eine Betätigungskennzeichnung F3 des Feldschwächungsstromkorrekturwertrechners 121 einzuschalten oder zu aktivieren und fährt mit SCHRITT 13 fort.
-
Mit dieser Einstellung wird die erste Verarbeitung zur Erhöhung einer Klemmenspannung durch Betätigung des Induktionsspannungskonstantensteuerwertermittlers 93 vor der zweiten Verarbeitung zur Erhöhung einer Klemmenspannung durch den Gleichspannungssteuerwertermittler 120 und der dritten Verarbeitung zur Erhöhung einer Klemmenspannung durch den Feldschwächungsstromkorrekturwertrechner 121 ausgeführt. Ferner wird die erste Verarbeitung zur Reduzierung einer Klemmenspannung durch den Induktionsspannungskonstantensteuerwertermittler 93 vor der zweiten Verarbeitung zur Reduzierung einer Klemmenspannung durch den Gleichspannungssteuerwertermittler 120 ausgeführt.
-
Die erste Verarbeitung zur Erhöhung einer Klemmenspannung und die erste Verarbeitung zur Reduzierung einer Klemmenspannung, die mechanische Verarbeitungen sind, die eine höhere Betriebsleistung eines Motors erlauben, obwohl sie langsam in der Reaktion sind, ermöglichen es, den Betrieb des Motors 1 mit Priorität auf die Betriebsleistung zu steuern.
-
Währenddessen fährt in dem Fall, in dem die Änderungsrate ΔTr_c des Drehmomentsteuerwerts Tr_c in SCHRITT 10 gleich dem Referenzwert ΔTr_limit oder größer ist, der Drehmomentreaktionsermittler 110 dann mit SCHRITTI 1 fort. In SCHRITT 11 ermittelt der Drehmomentreaktionsermittler 110, ob die Differenz ΔVp zwischen dem Betrag Vp des resultierenden Vektors V der Klemmenspannung des d-Achsen-Ankers und der Klemmenspannung des q-Achsen-Ankers und der Sollspannung Vp_soll gleich dem vorgegebenen Referenzwert ΔVp_limit ist oder größer. Wenn ΔVp größer als ΔVp_limit ist, das heißt, wenn ΔVp klein ist während die Änderungsrate ΔTr_c eines Drehmomentsteuerwerts groß ist, verzweigt der Drehmomentreaktionsermittler 110 dann nach SCHRITT 20, um die oben beschriebene Verarbeitung in SCHRITT 20 auszuführen und fährt mit SCHRITT 13 fort.
-
Währenddessen fährt in dem Fall, in dem ΔVp gleich ΔVp_limit oder größer ist, das heißt, in dem Fall, in dem die Änderungsrate ΔTr_c eines Drehmomentsteuerwerts groß ist und ΔVp ebenfalls groß ist, der Drehmomentreaktionsermittler 110 dann mit SCHRITT 12 fort. Der Drehmomentreaktionsermittler 110 schaltet die Betätigungskennzeichnung F1 des Induktionsspannungskonstantensteuerwertermittlers 93 aus oder deaktiviert sie, während er die Betätigungskennzeichnung F2 des Gleichspannungssteuerwertermittlers 120 und die Betätigungskennzeichnung F3 des Feldschwächungsstromkorrekturwertrechners 121 einschaltet oder aktiviert und fährt dann mit SCHRITT 13 fort.
-
Mit dieser Einstellung wird die zweite Verarbeitung zur Erhöhung einer Klemmenspannung durch den Gleichspannungssteuerwertermittler 120 und die dritte Verarbeitung zur Erhöhung einer Klemmenspannung durch den Feldschwächungsstromkorrekturwertrechner 121 vor der ersten Verarbeitung zur Erhöhung einer Klemmenspannung durch den Induktionsspannungskonstantensteuerwertermittler 93 ausgeführt. Ferner wird die zweite Verarbeitung zur Reduzierung einer Klemmenspannung durch den Gleichspannungssteuerwertermittler 120 vor der ersten Verarbeitung zur Reduzierung einer Klemmenspannung durch den Induktionsspannungskonstantensteuerwertermittler 93 ausgeführt.
-
Die zweite Verarbeitung zur Erhöhung einer Klemmenspannung, die dritte Verarbeitung zur Erhöhung einer Klemmenspannung und die zweite Verarbeitung zur Reduzierung einer Klemmenspannung, die elektrische Verarbeitungen sind, die eine schnelle Reaktion erlauben, ermöglichen es, den Betrieb des Motors 1 mit Priorität auf die Reaktionsfähigkeit einer Änderung des Drehmomentsteuerwerts Tr_c zu steuern.
-
In der vorliegenden Ausführungsform wurde die Höhe von ΔTr_c in SCHRITT 10 bestimmt und die Höhe von ΔVp wurde in SCHRITT 11 bestimmt, um die Ausführungsreihenfolge der ersten Verarbeitung zur Erhöhung einer Klemmenspannung, der zweiten Verarbeitung zur Erhöhung einer Klemmenspannung und der dritten Verarbeitung zur Erhöhung einer Klemmenspannung festzulegen, und um die Ausführungsreihenfolge der ersten Verarbeitung zur Reduzierung einer Klemmenspannung und der zweiten Verarbeitung zur Reduzierung einer Klemmenspannung festzulegen. Alternativ kann jedoch lediglich die Höhe entweder von ΔTr_c oder von ΔVp bestimmt werden, um die Ausführungsreihenfolge der Verarbeitung festzulegen.
-
In 5 wird nun entsprechend dem in 11 dargestellten Flussdiagramm eine Erläuterung des Betriebs des Induktionsspannungskonstantensteuerwertermittlers 93, des Gleichspannungssteuerwertermittlers 120 und des Feldschwächungsstromkorrekturwertrechners 121 gegeben, wenn alle der zuvor genannten Kennzeichnungen F1, F2 und F3 auf EIN stehen. In 11 wird die Verarbeitung in SCHRITT 30 bis SCHRITT 32 und SCHRITT 40 bis SCHRITT 41 durch den Induktionsspannungskonstantensteuerwertermittler 93 ausgeführt und die Verarbeitung in SCHRITT 32 und SCHRITT 50 bis SCHRITT 51 wird durch den Gleichspannungssteuerwertermittler 120 ausgeführt. Die Verarbeitung in SCHRITT 60 wird durch den Feldschwächungsstromkorrekturwertrechner 121 ausgeführt.
-
In SCHRITT 30 in 11 ermittelt der Induktionsspannungskonstantensteuerwertermittler 93, ob das durch den Subtrahierer 91 (siehe 5) berechnete ΔVp (ΔVp_soll – Vp) Null oder größer ist (0 ≤ ΔVp). Wenn ΔVp kleiner ist als Null (ΔVp < 0), das heißt, wenn der in 8(a) dargestellte, oben beschriebene resultierende Vektor V außerhalb des Sollspannungskreises C liegt, verzweigt der Induktionsspannungskonstantensteuerwertermittler 93 dann zu SCHRITT 40. Der Induktionsspannungskonstantensteuerwertermittler 93 ermittelt in SCHRITT 40, ob der mit dem Induktionsspannungskonstantensteuerwert Ke_c verknüpfte Rotorphasendifferenzsteuerwert θd_c, der durch proportionale Integrationssteuerung (PI) über ΔVp berechnet wird, nicht kleiner als ein Grenzwert θd_max (180 Grad) auf der Feldschwächungsseite durch den Aktor 30 ist. Wenn θd_c kleiner ist als θd_max (θd_c < θd_max), dann fährt der Induktionsspannungskonstantensteuerwertermittler 93 mit SCHRITT 41 fort, worin er Ke_c an den Rotorphasendifferenzerfasser 95 ausgibt.
-
Der Rotorphasendifferenzerfasser 95 wendet Ke_c auf die in 12 dargestellte Ke/θd-Abbildung an, um die mit Ke_c verknüpfte Rotorphasendifferenz θd_c1 zu ermitteln. Dann wird die durch den Subtrahierer 96 berechnete Differenz Δθd zwischen θd_c1 und θd_e an den Rotorphasendifferenzsteuerwertermittler 97 ausgegeben. Der Rotorphasendifferenzsteuerwertermittler 97 gibt einen Steuerwert θd_c2 der durch die PI-Steuerung über Δθd ermittelten Phasendifferenz an den Aktor 25 aus.
-
Der Aktor 25 führt die Verarbeitung des in 13 dargestellten Flussdiagramms aus, um die Rotorphasendifferenz des Motors 1 zu ändern. Genauer wandelt der Aktor 25 bei Empfang des Rotorphasendifferenzsteuerwerts θd_c2 von dem Rotorphasendifferenzsteuerwertermittler 97 in SCHRITT 1 der 13 θd_c2 in einen mechanischen Winkel β in SCHRITT 2 um. Dann wandelt der Aktor 25 in dem nachfolgenden SCHRITT 3 den mechanischen Winkel β in einen Arbeitswinkel γ des ersten Planetenträgers C1 um und dreht den ersten Planetenträger C1 um den Arbeitswinkel γ in SCHRITT 4. Dies führt dazu, dass die Rotorphasendifferenz um den Winkel basierend auf dem Rotorphasendifferenzsteuerwert θd_c2 geändert wird und die magnetischen Flüsse der Felder des Motors 1 werden entsprechend geändert, was somit die erste Verarbeitung zur Erhöhung einer Klemmenspannung ausführt, um von dem in 8(a) dargestellten Zustand in den in 8(b) dargestellten Zustand wie oben beschrieben zu wechseln.
-
Währenddessen verzweigt der Gleichspannungssteuerwertermittler 120 zu SCHRITT 50, wenn θd_c in SCHRITT 40 gleich θd_max oder größer ist. Der Gleichspannungssteuerwertermittler 120 ermittelt in SCHRITT 50, ob der durch die PI-Steuerung über ΔVp berechnete Gleichspannungssteuerwert Vdc_c nicht kleiner als Vdc_max ist, das eine Höchstspannung darstellt, die durch den Gleichspannungswandler 101 ausgegeben werden kann.
-
Wenn Vdc_c kleiner ist als Vdc_max, dann fährt der Gleichspannungssteuerwertermittler 120 mit SCHRITT 51 fort, worin er das durch die PI-Steuerung über ΔVp berechnete Vdc_c (Vdc_c wird in diesem Fall erhöht) an den Gleichspannungswandler 101 ausgibt und fährt mit SCHRITT 33 fort. Dies erhöht die Ausgangsspannung Vdc der Gleichspannungsquelle 100 und der Radius Vp_soll eines durch den Sollspannungskreisrechner berechneten Versorgungs-Sollspannungskreises erhöht sich entsprechend. Dann wird die zweite Verarbeitung zur Erhöhung einer Klemmenspannung ausgeführt, um von dem in 8(b) dargestellten Zustand in den in 8(c) dargestellten Zustand wie oben beschrieben zu wechseln.
-
Wenn in SCHRITT 50 Vdc_c gleich oder größer Vdc_max ist (Vdc_max ≤ Vdc_c), dann verzweigt die Verarbeitung zu SCHRITT 60. In diesem Fall kann die Ausgangsspannung Vdc der Gleichspannungsquelle 100 nicht weiter erhöht werden. Folglich gibt der Feldschwächungsstromkorrekturwertrechner 121 den durch die PI-Steuerung über der Differenz ΔVdc zwischen Vdc_c und Vdc_s berechneten Feldschwächungsstromkorrekturwert ΔId_vol an den Addierer 51 aus. Dies führt dazu, dass der d-Achsen-Strom zunimmt und die dritte Verarbeitung zur Erhöhung einer Klemmenspannung ausgeführt wird, um von dem in 8(c) dargestellten Zustand in den in 8(d) dargestellten Zustand wie oben beschrieben zu wechseln.
-
Somit wird dann, wenn in SCHRITT 30 bestimmt wird, dass Vp größer ist als Vp_soll, die Verarbeitung, um Vp nahe an Vp_soll zu bringen, in der folgenden Reihenfolge ausgeführt: die erste Verarbeitung zur Erhöhung einer Klemmenspannung – die zweite Verarbeitung zur Erhöhung einer Klemmenspannung 4 die dritte Verarbeitung zur Erhöhung einer Klemmenspannung.
-
Wenn nachfolgend in SCHRITT 30 ermittelt wird, dass Vp gleich Vp_soll oder kleiner ist (der in 9(a) dargestellte oben beschriebene Zustand), dann fährt die Verarbeitung mit SCHRITT 31 fort. In SCHRITT 31 ermittelt der Induktionsspannungskonstantensteuerwertermittler 93, ob der mit dem Induktionsspannungskonstantensteuerwert Ke_c verknüpfte Rotorphasendifferenzsteuerwert θd_c, der durch die PI-Steuerung über ΔVp berechnet wurde, nicht größer als ein Grenzwert θd_min (Null Grad) auf der Feldstärkungsseite durch den Aktor 30 ist.
-
Wenn θd_c größer als θd_min ist (θd_min < θd_c), dann fährt die Verarbeitung mit SCHRITT 32 fort, in dem der Induktionsspannungskonstantensteuerwertermittler 93 Ke_c an den Rotorphasendifferenzerfasser 95 ausgibt. Dies führt dazu, dass die Rotorphasendifferenz des Motors 1 auf dieselbe Weise geändert wird, wie bei der oben erläuterten Verarbeitung in SCHRITT 41 und die magnetischen Flüsse der Felder des Motors 1 zunehmen, wodurch die Verarbeitung zur Reduzierung einer Klemmenspannung ausgeführt wird, um von dem in 9(a) dargestellten Zustand in den in 9(b) wie oben beschrieben zu wechseln.
-
Währenddessen verzweigt die Verarbeitung dann, wenn in SCHRITT 31 festgestellt wird, dass θd_c gleich θd_min oder kleiner ist (θd_c ≤ θd_min), zu SCHRITT 70. In diesem Fall kann die Rotorphasendifferenz nicht weiter verringert werden; daher gibt der Gleichspannungssteuerwertermittler 120 das durch die PI-Steuerung über ΔVp berechnete Vdc_c (Vdc_c wird in diesem Fall verringert) aus und fährt mit SCHRITT 33 fort.
-
Somit verringert sich die Ausgangsspannung Vdc der Gleichspannungsquelle 100 und der Radius Vp_soll des durch den Sollspannungskreisrechner berechneten Versorgungs-Sollspannungskreises verringert sich entsprechend. Dann wird die zweite Verarbeitung zur Reduzierung einer Klemmenspannung ausgeführt, um von dem in 9(b) dargestellten Zustand in den in 9(c) dargestellten Zustand zu wechseln.
-
Wie oben beschrieben ist, wird, wenn in SCHRITT 30 festgestellt wird, dass Vp gleich Vp_soll oder kleiner ist, die Verarbeitung, um Vp nahe an Vp_soll zu bringen, in der folgenden Reihenfolge ausgeführt: die erste Verarbeitung zur Reduzierung einer Klemmenspannung → die zweite Verarbeitung zur Reduzierung einer Klemmenspannung.
-
In der vorliegenden Ausführungsform wurde die Steuerung durch die in 11 dargestellte Verarbeitung durchgeführt, um den Betrag Vp durch Ausführen der ersten Verarbeitung zur Erhöhung einer Klemmenspannung, der zweiten Verarbeitung zur Erhöhung einer Klemmenspannung und der dritten Verarbeitung zur Erhöhung einer Klemmenspannung nahe an Vp_soll zu bringen, wenn Vp größer als Vp_soll ist, und die Steuerung wurde durchgeführt, um Vp durch Ausführen der ersten Verarbeitung zur Reduzierung einer Klemmenspannung und der zweiten Verarbeitung zur Reduzierung einer Klemmenspannung nahe an Vp_soll zu bringen, wenn Vp gleich Vp_soll oder kleiner ist; die Vorteile der vorliegenden Erfindung können jedoch ebenfalls erzielt werden, wenn lediglich eine der zuvor genannten Steuerungen ausgeführt wird.
-
Ferner wurde in der vorliegenden Ausführungsform der Feldschwächungsstromkorrekturwertrechner 121 bereitgestellt, um die dritte Verarbeitung zur Erhöhung einer Klemmenspannung auszuführen, um die Felder des Motors 1 durch Vergrößern des d-Achsen-Stroms zu schwächen; die Vorteile der vorliegenden Erfindung können jedoch erzielt werden, selbst wenn die dritte Verarbeitung zur Erhöhung einer Klemmenspannung nicht ausgeführt wird.
-
Zusätzlich wurde in SCHRITT 11 in 10 und in SCHRITT 30 in 11 der Betrag Vp des resultierenden Vektors V des d-Achsen-Spannungssteuerwerts Vd_c und des q-Achsen-Spannungssteuerwerts Vq_c mit dem Sollspannungskreisradius Vp_soll verglichen. Alternativ können jedoch die Klemmenspannungen der Anker des Motors 1 erfasst werden, um den Betrag des resultierenden Vektors der Klemmenspannungen der einzelnen Phasen zu berechnen und der berechnete Betrag des resultierenden Vektors (der dem Betrag des resultierenden Vektors der Klemmenspannungen der Anker der einzelnen Phasen des Motors in der vorliegenden Erfindung entspricht) und der Sollspannungskreisradius Vp_soll können verglichen werden.
-
Die vorliegende Erfindung hat die Motorsteuerung dargestellt, die ausgelegt ist, den Motor durch Umformen des Motors in eine Äquivalenzschaltung basierend auf einem rotierenden 2-Phasengleichstromkoordinatensystem, das aus der d-Achse und der q-Achse zusammengesetzt ist, zu bedienen. Die vorliegende Erfindung kann jedoch ebenfalls auf eine Motorsteuerung angewendet werden, die ausgelegt ist, den Motor durch Umformen des Motors in eine Äquivalenzschaltung basierend auf einem festen 2-Phasenwechselstromkoordinatensystem, das aus einer α-Achse und einer β-Achse zusammengesetzt ist, zu bedienen oder auf eine Motorsteuerung, die ausgelegt ist, einen 3-Phasenwechselstrommotor so wie er ist ohne Umformung des Motors in eine Äquivalenzschaltung zu bedienen.