CN213356301U - 一种弧线摆动装船机 - Google Patents
一种弧线摆动装船机 Download PDFInfo
- Publication number
- CN213356301U CN213356301U CN202022064704.9U CN202022064704U CN213356301U CN 213356301 U CN213356301 U CN 213356301U CN 202022064704 U CN202022064704 U CN 202022064704U CN 213356301 U CN213356301 U CN 213356301U
- Authority
- CN
- China
- Prior art keywords
- support
- hinged
- frame
- arm support
- pile foundation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Landscapes
- Ship Loading And Unloading (AREA)
Abstract
本实用新型公开了一种弧线摆动装船机,其跨设于陆侧桩基和海侧桩基上,该弧线摆动装船机包括:门座架,跨设于陆侧桩基和海侧桩基上方;皮带机系统,设于门座架上方,用于对物料进行传输;回转支承,设于陆侧桩基与门座架之间;第一行走台车,其设于门座架另一端的下方,用于为门座架提供在海侧桩基上的滑动支撑;摆动驱动装置,用于驱动门座架围绕回转支承进行摆动。本实用新型通过将弧线摆动装船机跨设于陆侧桩基和海侧桩基上,并通过摆动驱动装置带动弧线摆动装船机运行,使其一端围绕陆侧桩基上的回转支承转动,另一端在海侧沿弧线轨迹运动,从而可极大的减小海侧桩基的长度和宽度,有效的减少海侧桩基的建造成本。
Description
技术领域
本实用新型涉及装船机技术领域,特别涉及一种弧线摆动装船机。
背景技术
常规的装船机普遍在近海岸陆侧桩基上沿着两条平行的轨道直线行走,借助臂架伸缩、俯仰等动作实现装船作业;若装载船舶为大型散货船时,则需要将船停在良好的深水港区,如果在自然条件不利的情况下,还希望装载这种大型的散货船,就需要想办法在几公里乃至十几公里外的深水区建设码头,即在深水区建造海侧桩基,再将装船机安放于海侧桩基上,对物料进行输送装船。
由于传统的装船机为直线式,其行走方向普遍与散货船平行设置,因此就需要装船机的行程大于散货船上物料装载的长度范围,才能满足装船需求。并且,传统的装船机还带有尾车,为了覆盖整个装船区域,海侧桩基的长度必然要大于船长加上装船机主机和尾车的总长度,因此导致海侧桩基的整体长度远大于货船上物料装载的长度范围。此外,传统装船机的轨距较大,导致海侧桩基宽度过宽。而建造在深水区的海侧桩基的费用是极其庞大的,海侧桩基过长过宽,会极大的增加建造成本,因此,如何降低深水港区装船机所使用的海侧桩基的建造成本,是一个亟待解决的问题。
实用新型内容
本实用新型的目的在于解决现有深水港区装船机所使用的海侧桩基建造成本高的问题。本实用新型提供了一种弧线摆动装船机,可有效减少深水港区装船机所使用的海侧桩基的建造成本。
为解决上述技术问题,本实用新型的实施方式公开了一种弧线摆动装船机,跨设于陆侧桩基和海侧桩基上,弧线摆动装船机包括:
门座架,跨设于陆侧桩基和海侧桩基上方;
皮带机系统,设于门座架上方,用于对物料进行传输;
回转支承,设于陆侧桩基与门座架之间;
第一行走台车,其设于门座架另一端的下方,用于为门座架提供在海侧桩基上的滑动支撑;
摆动驱动装置,用于驱动门座架围绕回转支承进行摆动。
采用上述技术方案,通过将弧线摆动装船机跨设于陆侧桩基和海侧桩基上,并通过摆动驱动装置带动弧线摆动装船机围绕陆侧桩基上的回转支承转动,使其靠近海侧的一端沿弧线轨迹运动进行装船,从而可极大的减小海侧桩基的长度和宽度,有效的减少海侧桩基的建造成本。
可选地,该弧线摆动装船机还包括:
后臂架,滑动连接于门座架上;
后臂架驱动机构,设于后臂架上,用于带动后臂架在门座架上滑动;
立柱,与后臂架相铰接;
前臂架,位于立柱前侧,并与立柱相连;
俯仰驱动装置,设于立柱与后臂架之间,用于带动立柱与前臂架共同围绕立柱与后臂架的铰接处进行俯仰转动;
皮带机系统分置于门座架、后臂架和前臂架上,皮带机系统可随后臂架的俯仰转动而变形,也可随后臂架的滑动进行伸缩。
采用上述技术方案,通过驱动后臂架在门座架上滑动,可带动前臂架进行伸缩,当弧线摆动装船机对货船进行装载时,前臂架需伸出至货船上方,以完成装载,当弧线摆动装船机停机时,前臂架需向相反的方向回缩,以防止与货船产生刮碰或受海风影响;并且,通过后臂架带动前臂架伸缩,还可对装载位置进行调节;此外,通过设置俯仰驱动装置,可带动立柱与后臂架共同围绕立柱与后臂架的铰接处进行俯仰转动,当船体在空载高水位状态下进行换舱作业时,船体位置升高,此时将前臂架仰起,可避免前臂架与船体发生碰撞。
可选地,皮带机系统包括:
前段支架,设于前臂架上;
中段支架,设于后臂架上,中段支架的前端与前段支架的后端相邻接;
后段支架,设于门座架的上表面,后段支架位于中段支架的下方,中段支架与后段支架的后侧呈钝角设置;
承载托辊,其数量为多个,分别设于前段支架、中段支架和后段支架的上方;
回程托辊,其数量为多个,分别设于前段支架、中段支架和后段支架的下方;
驱动滚筒,设于后段支架的后端;
皮带,套设于驱动滚筒、承载托辊和回程托辊外表面;
皮带机驱动装置,设于后段支架上,用于驱动驱动滚筒转动,以带动皮带运行;
改向滚筒,其数量为多个,分别设于前段支架、中段支架和后段支架上,改向滚筒用于改变皮带的运行方向;
重锤张紧装置,设于后段支架的下方,用于张紧皮带。
采用上述技术方案,通过将皮带机系统分段设置于前臂架、后臂架和门座架上,可使皮带机的前段支架和中段支架随前臂架和后臂架一同运动,从而使前臂架处于任何状态时,物料均能在前臂架上进行传输;通过设置改向滚筒,可改变皮带的转向,从而可使皮带始终随前段支架、中段支架和后段支架之间相对位置的变化而发生形状改变;通过设置重锤张紧装置对皮带进行张紧,可使皮带在产生任何形状改变的情况下都能保持张紧状态。
可选地,重锤张紧装置包括箱体和置于箱体中的若干配重块,箱体上还设有张紧滚筒,皮带从张紧滚筒的底部穿过,箱体和配重块通过张紧滚筒将重力施加于皮带上使皮带张紧。
采用上述技术方案,可以使重锤张紧装置结构简单,且能够通过调节配重块的重量来调节重锤张紧装置对皮带施加的张紧力。
可选地,该弧线摆动装船机还包括溜筒装置,溜筒装置设于前臂架的前端下方,前臂架底面与溜筒装置上方相对应的位置上开设有送料口,皮带机系统将物料通过送料口送入至溜筒装置中。
可选地,溜筒装置包括:
连接筒,设于前臂架的前端下方,其下方为球状,连接筒的上方与下方均设有开口,其上方开口与前臂架的送料口相接;
筒体,设于连接筒下方,其上下两端均设有开口,筒体与连接筒相铰接;
接料斗,设于筒体的上端开口处,接料斗为球面状,连接筒的下方位于接料斗中,当连接筒随前臂架运动而发生转动时,连接筒的下方开口始终位于接料斗中。
溜筒摆动油缸,其缸筒与前臂架相铰接,伸出端与筒体相铰接,溜筒摆动油缸用于调节筒体的角度。
采用上述技术方案,通过溜筒摆动油缸带动筒体转动,可调节筒体的角度,使筒体保持竖直状态,从而避免海风等外力作用使筒体产生倾斜。
可选地,筒体的下端还设有抛料勺和抛料油缸,抛料勺铰接于筒体下端开口处,抛料油缸的缸筒与筒体相铰接,抛料油缸的伸出端与抛料勺相铰接。
采用上述技术方案,通过抛料油缸带动抛料勺转动,可调节抛料勺的角度,进而改变物料的抛料角度,以实现根据不同的现场情况满足实际应用的需求。
可选地,筒体包括与前臂架相连的第一筒体和设于第一筒体下方的第二筒体,第一筒体和第二筒体之间设有溜筒回转支承,第一筒体上还设有溜筒回转驱动装置,溜筒回转驱动装置用于驱动第二筒体转动。
采用上述技术方案,可以通过溜筒回转驱动装置带动第二筒体转动,可对抛料勺的抛料方向进行调节。
可选地,第一行走台车的数量至少为两个,第一行走台车包括:一级平衡梁,其上方与门座架铰接,该铰接点为第一铰点,一级平衡梁的两端分别设有第二铰点,两个第二铰点至第一铰点的水平距离相等,第二铰点上铰接有二级平衡梁,二级平衡梁的两端分别设有第三铰点和第四铰点,第四铰点至第二铰点的水平距离为第三铰点至第二铰点的水平距离的二倍,第三铰点上铰接有三级平衡梁,三级平衡梁的两端分别设有第五铰点,两个第五铰点至第三铰点的水平距离相等,第四铰点与第五铰点的下方铰接有车轮组。
采用上述技术方案,可使各车轮组所受的轮压相等,从而避免因某一个车轮组受轮压过大而对车轮组造成损伤。
可选地,车轮组包括车轮架,车轮架的中心点与第三铰点或第五铰点相铰接,车轮架上设有两个车轮,两个车轮的中心至车轮架中心点的水平距离相等。
采用上述技术方案,通过在车轮组中设置两个车轮,可增加车轮数量,从而减小分摊到各车轮上的轮压,此外,通过使两个车轮的中心至车轮架中心点的水平距离相等,可使各车轮所受轮压相等。
可选地,后臂架的下方设有第二行走台车,第二行走台车用于为后臂架提供在门座架上表面的滑动支撑,第二行走台车与第一行走台车的结构相同。
可选地,海侧桩基上设有弧形支架,弧形支架上设有销齿轮,弧形支架与销齿轮用于与摆动驱动装置相配合实现对座架的驱动,摆动驱动装置包括:
支撑架,与门座架相连;
第一电机,设于支撑架上;
第一齿轮,与设于第一电机的驱动端,并与销齿轮相啮合;
滚轮,设于支撑架下方,用于为支撑架提供在海侧桩基上的滑动支撑;
水平轮,设于支撑架下方,水平轮的数量为多个,其分置于弧形支架的内外两侧,当门座架围绕回转支承进行摆动时,水平轮在弧形支架的内外两侧滚动,用于对门座架的运动进行导向和限位。
可选地,门座架的上表面设有齿条,后臂架驱动机构包括:
第二电机,设于后臂架驱动机构上;
第二齿轮,设于第二电机的驱动端,并与齿条相啮合。
可选地,俯仰驱动装置包括:
卷筒,设于后臂架上;
第三电机,设于后臂架上,用于驱动卷筒转动;
第一滑轮,设于立柱顶端;
第二滑轮,设于后臂架上;
钢丝绳,其一端缠绕于卷筒上,另一端从卷筒伸出后依次缠绕经过第一滑轮、第二滑轮,再绕回第一滑轮,最后端部固定于后臂架上;
当第三电机带动卷筒向收卷钢丝绳的方向转动时,钢丝绳向第一滑轮施加拉力,使立柱与前臂架围绕立柱与后臂架的铰接处转动,前臂架仰起。
可选地,该弧线摆动装船机还包括防倾覆支架,防倾覆支架包括设于立柱上的移动支架和设于后臂架上的固定支架,当立柱仰起时,移动支架和固定支架相抵接。
当船体在空载高水位状态下进行换舱作业时,立柱与前臂架需仰起,此时海风对前臂架产生倾覆力矩,采用上述技术方案,通过设置防倾覆支架,可使立柱仰起时,移动支架和固定支架相抵接,从而防止前臂架向固定支架所在的一侧翻转。
可选地,立柱顶部与前臂架之间设有至少一个拉杆。
可选地,海侧桩基上方的一侧设有防风维修搁架,防风维修搁架用于支撑固定处于回缩状态的前臂架。
采用上述技术方案,通过设置防风维修搁架,可使弧线摆动装船机停止作业后并回转到停机位时,前臂架处于缩回状态和水平状态搁置在防风维修搁架上锁定,不会影响的散货船舶的停靠,并且增强设备的安全可靠性。
附图说明
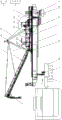
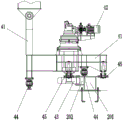
图1示出本实用新型提供的一种弧线摆动装船机处于前臂架仰起状态下的结构示意图;
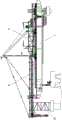
图2示出本实用新型提供的一种弧线摆动装船机处于工作状态下的结构示意图;
图3示出本实用新型提供的一种弧线摆动装船机处于停机状态下的结构示意图;
图4示出本实用新型提供的一种弧线摆动装船机的俯视布置图;
图5示出图1的左视图;
图6示出本实用新型提供的皮带机系统在伸出状态下的结构示意图;
图7示出本实用新型提供的皮带机系统在回缩状态下的结构示意图;
图8示出图7的俯视图;
图9示出图6中A部分的局部放大图;
图10示出图6中B部分的局部放大图;
图11示出图6中重锤张紧装置的C向示意图;
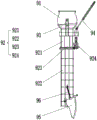
图12示出本实用新型提供的溜筒装置的结构示意图;
图13示出图1中第一行走台车的D向示意图;
图14示出图1中E部分的局部放大图;
图15示出图14中后臂架驱动机构的F向示意图;
图16示出图14中第三电机和卷筒相配合的F向示意图;
图17示出图5中G-G向剖视图。
附图标记:
1.门座架;2.回转支承;3.第一行走台车;31.一级平衡梁;32.第一铰点;33.第二铰点;34.二级平衡梁;35.第三铰点;36.第四铰点;37.三级平衡梁;38.第五铰点;39.车轮组;391.车轮架;392.车轮;4.摆动驱动装置;41.支撑架;42.第一电机;43.第一齿轮;44.滚轮;45.水平轮;5.皮带机系统;51.前段支架;52.中段支架;53.后段支架;54.承载托辊;55.回程托辊;56.驱动滚筒;57.皮带机驱动装置;58.改向滚筒;59.重锤张紧装置;591.箱体;592.配重块;593.张紧滚筒;60.皮带;6.后臂架;7.立柱;8.前臂架;9.溜筒装置;91.连接筒;92.筒体;921.第一筒体;922.第二筒体;923.溜筒回转支承;924.溜筒回转驱动装置;93.接料斗;94.溜筒摆动油缸;95.抛料勺;96.抛料油缸;10.防倾覆支架;101.移动支架;102.固定支架;11.后臂架驱动机构;110.齿条;111.第二电机;112.第二齿轮;12.第二行走台车;13.俯仰驱动装置;131.第三电机;132.卷筒;133.第一滑轮;134.第二滑轮;135.钢丝绳;14.拉杆;15.防风维修搁架;100.陆侧桩基;200.海侧桩基;201.弧形支架;202.销齿轮。
具体实施方式
以下由特定的具体实施例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭示的内容轻易地了解本实用新型的其他优点及功效。虽然本实用新型的描述将结合较佳实施例一起介绍,但这并不代表此实用新型的特征仅限于该实施方式。恰恰相反,结合实施方式作实用新型介绍的目的是为了覆盖基于本实用新型的权利要求而有可能延伸出的其它选择或改造。为了提供对本实用新型的深度了解,以下描述中将包含许多具体的细节。本实用新型也可以不使用这些细节实施。此外,为了避免混乱或模糊本实用新型的重点,有些具体细节将在描述中被省略。需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
应注意的是,在本说明书中,相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
在本实施例的描述中,需要说明的是,术语“上”、“下”、“内”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
在本实施例的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实施例中的具体含义。
为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的实施方式作进一步地详细描述。
如图1至图5所示,本实用新型的实施方式公开了一种弧线摆动装船机,其跨设于陆侧桩基100和海侧桩基200上,该弧线摆动装船机包括:
门座架1,跨设于陆侧桩基100和海侧桩基200上方;
皮带机系统5,设于门座架1上方,用于对物料进行传输;
回转支承2,设于陆侧桩基100与门座架1之间;
第一行走台车3,设于门座架1另一端的下方,第一行走台车3底部与海侧桩基200相接触,用于为门座架1提供在海侧桩基200上的滑动支撑;
摆动驱动装置4,其可设于海侧桩基200与门座架1之间,用于驱动门座架1围绕回转支承2进行摆动。
采用上述技术方案,通过将弧线摆动装船机跨设于陆侧桩基100和海侧桩基200上,并通过摆动驱动装置4带动门座架1围绕回转支承2转动,可带动皮带机系统5随门座架1一同转动,使皮带机系统5靠近海侧的一端沿弧线轨迹运动,进而对货船进行装载。在实际工作中,货船停置于海侧桩基200远离陆侧桩基100的一侧,此时第一行走台车3位于货船与陆侧桩基100之间,弧线摆动装船机靠近海侧的一端为工作端,该工作端位于货船上方进行装船,因此,由门座架1的转动的轨迹可知,第一行走台车3的运行轨迹长度小于弧线摆动装船机工作端的运行轨迹长度,此外,第一行走台车3运动轨迹的两端无需设置其他大型装置,因此,海侧桩基200的长度略大于第一行走台车3运动轨迹的长度即可,由此可知,相比于现有装船机,该设计能够极大的减小海侧桩基200的长度。此外,第一行走台车3与摆动驱动装置4不需要占用过宽的面积,因此能够减小海侧桩基200的宽度,从而有效的减少海侧桩基200的建造成本。
在某些实施例中,摆动驱动装置4可带动门座架1和皮带机系统5实现以回转支承2中心为圆心,±45°回转功能。
进一步的,海侧桩基200上设有弧形支架201,弧形支架201上设有销齿轮202,弧形支架201与销齿轮202用于与摆动驱动装置4相配合实现对座架1的驱动,摆动驱动装置4如图17所示,包括:
支撑架41,与门座架1相连;
第一电机42,设于支撑架41上;
第一齿轮43,与设于第一电机42的驱动端,并与销齿轮202相啮合;
滚轮44,设于支撑架41下方,用于为支撑架41提供在海侧桩基200上的滑动支撑;
水平轮45,设于支撑架41下方,水平轮45的数量可以为多个,其分置于弧形支架201的内外两侧,水平轮45的外圆周面可以与弧形支架201的内侧面或外侧面相接触。
第一电机42可驱动第一齿轮43转动,第一齿轮43在与销齿轮202啮合的作用下,带动支撑架41运行,从而带动门座架1运行。此时水平轮45在弧形支架201的内外两侧滚动,用于对门座架1的运动进行导向和限位,使门座架1围绕回转支承2进行摆动。
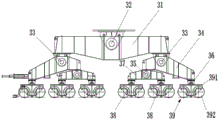
本实用新型对第一行走台车3的数量和具体结构不做限定,在一些实施例中,第一行走台车3的数量至少为两个。在一些实施例中,第一行走台车3如图13所示,可以包括:一级平衡梁31,其上方与门座架1铰接,该铰接点为第一铰点32,一级平衡梁31的两端分别设有第二铰点33,两个第二铰点33至第一铰点32的水平距离相等,第二铰点33上铰接有二级平衡梁34,二级平衡梁34的两端分别设有第三铰点35和第四铰点36,第四铰点36至第二铰点33的水平距离为第三铰点35至第二铰点33的水平距离的二倍,第三铰点35上铰接有三级平衡梁37,三级平衡梁37的两端分别设有第五铰点38,两个第五铰点38至第三铰点35的水平距离相等,第四铰点36与第五铰点38的下方铰接有车轮组39。由上述设计可知,第四铰点36至第二铰点33的水平距离为第三铰点35至第二铰点33的水平距离的二倍,因此第三铰点35所受到的来自弧线摆动装船机的压力是第四铰点36所受到的来自弧线摆动装船机的压力的二倍,但由于第四铰点36的下方只设有一组车轮组,而第三铰点35下方设有两组车轮组,且两组车轮组中心处至第三铰点35的距离相等,可平均分担来自于第三铰点35的压力,由此可知,三组车轮组所受的轮压相等。该设计可避免车轮组所受压力不均,以及某一个车轮组受到压力过大而造成损伤。若不采用上述设计,而是采用用常规的设计方法,将三个车轮组放置于一级平衡梁31下方,使一个车轮组位于第一铰点32正下方,其余两个车轮组等距分置于两侧,那么势必会造成位于中间的车轮组受到压力过大,三个车轮组受力不均。若只在一级平衡梁31下方设置两个车轮组,则会减少车轮组数量,导致每个车轮组所受的压力增大。
具体的,车轮组39可以包括车轮架391,车轮架391的中心点与第三铰点35或第五铰点38相铰接,车轮架391上设有两个车轮392,两个车轮392的中心至车轮架391中心点的水平距离相等。在实际应用中,门座架1的上方可设有轨道,车轮392在轨道运行。通过在车轮组39中设置两个车轮392,可增加车轮392数量,从而减小分摊到各车轮392上的轮压,此外,通过使两个车轮392的中心至车轮架391中心点的水平距离相等,可使各车轮392所受轮压相等。
进一步的,后臂架6的下方设有第二行走台车12,第二行走台车12用于为后臂架6提供在门座架1上表面的滑动支撑。在某些实施例中,第二行走台车12与第一行走台车3的结构相同。
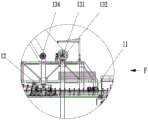
进一步的,该弧线摆动装船机还包括:
后臂架6,滑动连接于门座架1上;
后臂架驱动机构11,设于后臂架6上,用于带动后臂架6在门座架1上滑动;
立柱7,位于后臂架6的前侧(即远离陆侧桩基100的一侧)与后臂架6相铰接;
前臂架8,位于立柱7前侧(即远离陆侧桩基100的一侧),并与立柱7固定连接;
俯仰驱动装置13,设于立柱7与后臂架6之间,其可带动立柱7与前臂架8共同围绕立柱7与后臂架6的铰接处进行俯仰转动;
皮带机系统5分置于门座架1、后臂架6和前臂架8上,皮带机系统5可随后臂架6的俯仰转动而变形,也可随后臂架6的滑动进行伸缩。
由上述技术方案可知,后臂架驱动机构11可带动后臂架6、立柱7和前臂架8共同在门座架1上滑动;俯仰驱动装置13可带动立柱7与前臂架8共同围绕立柱7与后臂架6的铰接处进行俯仰转动。当需要对货船进行装载时,前臂架8向海侧(即远离陆侧桩基100的一侧)伸出时,此时弧线摆动装船机处于工作状态,如图2所示,前臂架8伸出至货船上方,皮带机系统5将物料输送至货船,以实现对货船进行装载。当货船处于换舱状态时,即货船在空载高水位状态下进行换舱作业,此时船体位置升高,前臂架8仰起,可避免与货船发生碰撞,如图1所示。当弧线摆动装船机需处于停机状态时,前臂架8向陆侧(即靠近陆侧桩基100的一侧)缩回,且前臂架8为水平状态时,如图3所示,此时前臂架8缩回,以防止与货船产生刮碰或受海风影响。此外,通过后臂架6带动前臂架8伸缩,还可对装载位置进行调节。
在某些实施例中,立柱7顶部与前臂架8之间还可以连接有至少一个拉杆14,前臂架8与立柱7通过拉杆14铰接为一体。在一些实施例中,当弧线摆动装船机处于工作状态时,前臂架8与立柱7可围绕立柱7与后臂架6的铰接处做相对于水平面-3°至﹢10°的俯仰运动。当货船处于换舱状态时,前臂架8与立柱7可围绕立柱7与后臂架6的铰接处做相对于水平面+10°至+25°的俯仰运动。
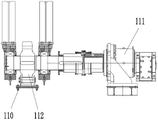
进一步的,门座架1的上表面固定连接有齿条110,后臂架驱动机构11如图15所示,包括:
第二电机111,设于后臂架驱动机构11上;
第二齿轮112,设于第二电机111的驱动端,并与齿条110相啮合。
第二电机111带动第二齿轮112转动,第二齿轮112在与齿条110啮合的作用下,可带动后臂架6沿齿条110设置的方向运行。
在一些实施例中,第二电机111与第二齿轮112之间还设有减速机。
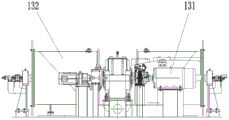
本实用新型对俯仰驱动装置13的具体结构不做限定,在一些实施例中,俯仰驱动装置13如图14、图16所示,可以包括:
卷筒132,设于后臂架6上;
第三电机131,设于后臂架6上,用于驱动卷筒132转动;
第一滑轮133,设于立柱7顶端;
第二滑轮134,设于后臂架6上;
钢丝绳135,其一端缠绕于卷筒132上,另一端从卷筒132伸出后依次缠绕经过第一滑轮133、第二滑轮134,再绕回第一滑轮133,最后端部固定于后臂架6上;
当第三电机131带动卷筒132向收卷钢丝绳135的方向转动时,钢丝绳135向第一滑轮133施加拉力,使立柱7与前臂架8围绕立柱7与后臂架6的铰接处转动,从而带动前臂架8仰起。
在某些实施例中,第三电机131与卷筒132之间还设有减速机。
在某些实施例中,立柱7顶端设有多个第一滑轮133,后臂架6上设有多个第二滑轮134,后臂架6上设有多个卷筒132,第三电机131可通过传动机构(如链轮链条机构、皮带皮带轮机构等)带动多个卷筒132同时转动,每个卷筒132上缠绕的钢丝绳135从卷筒132伸出后分别缠绕经过一个第一滑轮133和一个第二滑轮134。通过设置多个钢丝绳135牵引立柱7,可增大牵引力,并使立柱7受力均匀,运行平稳。
进一步的,皮带机系统5如图6、图7、图8所示,包括:
前段支架51,固定连接于前臂架8上;
中段支架52,固定连接于后臂架6上,中段支架52的前端与前段支架51的后端相邻接,中段支架52相对于水平面具有一定倾斜角度;
后段支架53,固定连接于门座架1的上表面,后段支架53位于中段支架52的下方,中段支架52与后段支架53的后侧(靠近陆侧桩基100的一侧)呈钝角设置,如图9所示,在某些实施例中,该角度可为172°;
承载托辊54,其数量为多个,分别设于前段支架51、中段支架52和后段支架53的上方;
回程托辊55,其数量为多个,分别设于前段支架51、中段支架52和后段支架53的下方;
驱动滚筒56,转动连接于后段支架53的后端(靠近陆侧桩基100的一端);
皮带60,套设于驱动滚筒56、承载托辊54和回程托辊55外表面;
皮带机驱动装置57,设于后段支架53上,用于驱动驱动滚筒56转动,以带动皮带60运行;
改向滚筒58,其数量为多个,分别设于前段支架51、中段支架52和后段支架53上,改向滚筒58用于改变皮带60的运行方向;
重锤张紧装置59,设于后段支架53的下方,用于张紧皮带60。
通过将皮带机系统分段设置于前臂架8、后臂架6和门座架1上,可使皮带机的前段支架51和中段支架52随前臂架8和后臂架6一同运动,当前臂架8和后臂架6向前(即远离陆侧桩基100的一侧)伸出时,前段支架51和中段支架52也能随之向前伸出,如图6所示,当前臂架8和后臂架6向后回缩时,前段支架51和中段支架52也能随之向后回缩,如图7所示,当前臂架8仰起时,前段支架51也能随之仰起,从而使前臂架8处于任何状态时,物料均能在前臂架8上进行传输;通过设置改向滚筒58,可改变皮带60的转向,从而可使皮带60始终随前段支架51、中段支架52和后段支架53之间相对位置的变化而发生形状改变;通过设置重锤张紧装置59对皮带60进行张紧,可使皮带在产生任何形状改变的情况下都能保持张紧状态。
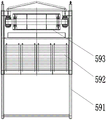
本实用新型对重锤张紧装置59的具体结构不做限定,在一些实施例中,重锤张紧装置59如图10、图11所示,可以包括箱体591和置于箱体591中的若干配重块592,箱体591上还转动连接有张紧滚筒593,皮带60从张紧滚筒593的底部穿过,箱体591和配重块592通过张紧滚筒593将重力施加于皮带60上使皮带60张紧。
采用上述技术方案,可以使重锤张紧装置59结构简单,且能够通过调节配重块592的重量来调节重锤张紧装置59对皮带60施加的张紧力。
进一步的,该弧线摆动装船机还包括溜筒装置9,溜筒装置9设于前臂架8的前端下方,前臂架8底面与溜筒装置9上方相对应的位置上开设有送料口,皮带机系统5将物料通过送料口送入至溜筒装置9中。
具体的,溜筒装置9如图12所示,包括:
连接筒91,固定连接于前臂架8的前端下方,其下方为球状,连接筒91的上方与下方均设有开口,其上方开口与前臂架8的送料口相接;
筒体92,设于连接筒91下方,其上下两端均设有开口,筒体92与连接筒91相铰接;
接料斗93,固定连接于筒体92的上端开口处,接料斗93为球面状,连接筒91的下方位于接料斗93中,当连接筒91随前臂架8运动而发生转动时,连接筒91的下方开口始终位于接料斗93中。
溜筒摆动油缸94,溜筒摆动油缸94包括缸筒和伸出端活塞杆,其缸筒与前臂架8相铰接,溜筒摆动油缸94的伸出端活塞杆与筒体92相铰接,溜筒摆动油缸94用于调节筒体92的角度。溜筒装置9可有效抑制物料扬尘。通过溜筒摆动油缸94带动筒体92转动,可调节筒体92的角度,使筒体92保持竖直状态,从而避免海风等外力作用使筒体92产生倾斜。
进一步的,筒体92的下端还设有抛料勺95和抛料油缸96,抛料勺95铰接于筒体92下端开口处,抛料油缸96包括缸筒和伸出端活塞杆,其缸筒于筒体92相铰接,抛料油缸96的伸出端活塞杆与抛料勺95相铰接。通过抛料油缸96带动抛料勺95转动,可调节抛料勺95的角度,进而改变物料的抛料角度,使物料能够抛射的更远,从而能够覆盖船舱更大的装货范围。在某些实施例中,抛料角度的调节范围为相对于水平面-10°至+40°之间。
进一步的,筒体92包括与前臂架8相连的第一筒体921和设于第一筒体921下方的第二筒体922,第一筒体921和第二筒体922之间设有溜筒回转支承923,第一筒体921上还设有溜筒回转驱动装置924,溜筒回转驱动装置924用于驱动第二筒体922转动。在某些实施例中,第二筒体922的旋转角度为±180°。通过溜筒回转驱动装置924带动第二筒体922转动,可对抛料勺95的抛料方向进行调节。
在某些实施例中,该弧线摆动装船机还包括防倾覆支架10,防倾覆支架10包括固定连接于立柱7上的移动支架101和固定连接于后臂架6上的固定支架102,当立柱7仰起时,移动支架101和固定支架102相抵接。当船体在空载高水位状态下进行换舱作业时,立柱7与前臂架8需仰起,此时海风对前臂架8产生倾覆力矩,采用上述技术方案,通过设置防倾覆支架10,可使立柱7仰起时,移动支架101和固定支架102相抵接,从而防止前臂架8向固定支架102所在的一侧翻转。
在某些实施例中,海侧桩基200上方的一侧设有防风维修搁架15,防风维修搁架15用于支撑固定处于回缩状态的前臂架8。通过设置防风维修搁架15,可使弧线摆动装船机停止作业后并回转到停机位时,前臂架8处于缩回状态和水平状态搁置在防风维修搁架15上锁定,不会影响的散货船舶的停靠,并且增强设备的安全可靠性。该防风维修搁架15可起到防海风锚定的作用,还能够方便对远离陆基岸线的弧线摆动装船机进行维修。
在某些实施例中,弧线摆动装船机的陆侧一端(靠近回转支承2的一端)还设有高架廊道皮带机,皮带机系统5的陆侧一端的上方还设有卸料斗,物料可通过高架廊道皮带机和卸料斗传输至皮带机系统5上,再又皮带机系统5将物料输送至溜筒装置9处,物料通过溜筒装置9落入到货船内。
在某些实施例中,弧线摆动装船机还设有司机室、电气房、变压器房、电控系统和电缆拖令等,司机室中设有联动台手柄和按钮。电控系统可以满足人工手动操作装船和机器半自动装船的功能。手动操作是由人工根据具体的现场情况通过操控司机室内的联动台手柄和按钮实现装船机的回转摆动和皮带伸缩功能。为了降低司机操作的疲劳强度,可以由人工在电控系统中设置好回转摆动的左右位置和溜筒装置的前后位置,然后由电脑自动控制机构动作来完成作业功能。
在某些实施例中,本实用新型的工作原理为:当需要对货船进行装船时,后臂架驱动机构11可带动后臂架6、立柱7和前臂架8共同在门座架1上向货船所在方向滑动,使前臂架8伸出,并确保溜筒装置9位于货船上方,此时皮带机系统5能够随前臂架8的运行而产生相应的形状变化,将物料输送至溜筒装置9处,物料通过溜筒装置9落入到货船内,实现物料装载。当需要改变物料在货船上的装船位置时,摆动驱动装置4带动门座架1和前臂架8围绕回转支承2转动,进而带动溜筒装置9在货船上方沿弧线轨迹运行,使溜筒装置9在货船上方的位置发生改变。同时,后臂架驱动机构11也可带动前臂架8伸缩,使溜筒装置9在货船上方的位置发生改变。将前臂架8的转动运动和伸缩运动结合到一起,可精准调节溜筒装置9在货船上方的位置。
当货船在空载高水位状态下进行换舱作业时,为避免前臂架8与货船发生干涉,需将前臂架8仰起。此时启动第三电机131,使其带动卷筒132转动,钢丝绳135卷入卷筒132中,同时钢丝绳135向第一滑轮133施加拉力,使立柱7与前臂架8围绕立柱7与后臂架6的铰接处转动,从而带动前臂架8仰起。当货船完成换舱作业后,第三电机131反转,卷筒132将钢丝绳135释放,前臂架8在重力的作用下向下转动。
当弧形摆动装船机完成装船作业后,需要停机时,后臂架驱动机构11可带动后臂架6、立柱7和前臂架8共同在门座架1上向回转支承2所在方向滑动,前臂架8回缩,同时摆动驱动装置4带动门座架1和前臂架8围绕回转支承2向防风维修搁架15所在的一侧转动,当弧线摆动装船机回转到停机位并停止作业时,前臂架8搁置在防风维修搁架15上锁定,不会影响的散货船舶的停靠,并且增强设备的安全可靠性。
虽然通过参照本实用新型的某些优选实施方式,已经对本实用新型进行了图示和描述,但本领域的普通技术人员应该明白,以上内容是结合具体的实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。本领域技术人员可以在形式上和细节上对其作各种改变,包括做出若干简单推演或替换,而不偏离本实用新型的精神和范围。
Claims (17)
1.一种弧线摆动装船机,其特征在于,跨设于陆侧桩基和海侧桩基上,所述弧线摆动装船机包括:
门座架,跨设于所述陆侧桩基和所述海侧桩基上方;
皮带机系统,设于所述门座架上方,用于对物料进行传输;
回转支承,设于所述陆侧桩基与所述门座架之间;
第一行走台车,其设于所述门座架另一端的下方,用于为所述门座架提供在所述海侧桩基上的滑动支撑;
摆动驱动装置,用于驱动所述门座架围绕所述回转支承进行摆动。
2.如权利要求1所述的弧线摆动装船机,其特征在于,还包括:
后臂架,滑动连接于所述门座架上;
后臂架驱动机构,设于所述后臂架上,用于带动所述后臂架在所述门座架上滑动;
立柱,与所述后臂架相铰接;
前臂架,位于所述立柱前侧,并与所述立柱相连;
俯仰驱动装置,设于所述立柱与所述后臂架之间,用于带动所述立柱与所述前臂架共同围绕所述立柱与所述后臂架的铰接处进行俯仰转动;
所述皮带机系统分置于所述门座架、所述后臂架和所述前臂架上,所述皮带机系统可随所述后臂架的俯仰转动而变形,也可随所述后臂架的滑动进行伸缩。
3.如权利要求2所述的弧线摆动装船机,其特征在于,所述皮带机系统包括:
前段支架,设于所述前臂架上;
中段支架,设于所述后臂架上,所述中段支架的前端与所述前段支架的后端相邻接;
后段支架,设于所述门座架的上表面,所述后段支架位于所述中段支架的下方,所述中段支架与所述后段支架的后侧呈钝角设置;
承载托辊,其数量为多个,分别设于所述前段支架、中段支架和后段支架的上方;
回程托辊,其数量为多个,分别设于所述前段支架、中段支架和后段支架的下方;
驱动滚筒,设于所述后段支架的后端;
皮带,套设于所述驱动滚筒、所述承载托辊和所述回程托辊外表面;
皮带机驱动装置,设于所述后段支架上,用于驱动所述驱动滚筒转动,以带动所述皮带运行;
改向滚筒,其数量为多个,分别设于所述前段支架、中段支架和后段支架上,所述改向滚筒用于改变所述皮带的运行方向;
重锤张紧装置,设于所述后段支架的下方,用于张紧皮带。
4.如权利要求3所述的弧线摆动装船机,其特征在于,所述重锤张紧装置包括箱体和置于所述箱体中的若干配重块,所述箱体上还设有张紧滚筒,所述皮带从所述张紧滚筒的底部穿过,所述箱体和所述配重块通过所述张紧滚筒将重力施加于所述皮带上以使所述皮带张紧。
5.如权利要求2至4中任一项所述的弧线摆动装船机,其特征在于,还包括溜筒装置,所述溜筒装置设于所述前臂架的前端下方,所述前臂架底面与所述溜筒装置上方相对应的位置上开设有送料口,所述皮带机系统将物料通过所述送料口送入至所述溜筒装置中。
6.如权利要求5所述的弧线摆动装船机,其特征在于,所述溜筒装置包括:
连接筒,设于所述前臂架的前端下方,其下方为球状,所述连接筒的上方与下方均设有开口,其上方开口与所述前臂架的送料口相接;
筒体,设于所述连接筒下方,其上下两端均设有开口,所述筒体与所述连接筒相铰接;
接料斗,设于所述筒体的上端开口处,所述接料斗为球面状,所述连接筒的下方位于所述接料斗中,当所述连接筒随所述前臂架运动而发生转动时,所述连接筒的下方开口始终位于所述接料斗中;
溜筒摆动油缸,其缸筒与所述前臂架相铰接,其伸出端与所述筒体相铰接,所述溜筒摆动油缸用于调节所述筒体的角度。
7.如权利要求6所述的弧线摆动装船机,其特征在于,所述筒体的下端还设有抛料勺和抛料油缸,所述抛料勺铰接于所述筒体下端开口处,所述抛料油缸的缸筒与所述筒体相铰接,所述抛料油缸的伸出端与所述抛料勺相铰接。
8.如权利要求7所述的弧线摆动装船机,其特征在于,所述筒体包括与所述前臂架相连的第一筒体和设于所述第一筒体下方的第二筒体,所述第一筒体和所述第二筒体之间设有溜筒回转支承,所述第一筒体上还设有溜筒回转驱动装置,所述溜筒回转驱动装置用于驱动所述第二筒体转动。
9.如权利要求1至4中任一项所述的弧线摆动装船机,其特征在于,所述第一行走台车的数量至少为两个,所述第一行走台车包括:一级平衡梁,其上方与所述门座架铰接,该铰接点为第一铰点,所述一级平衡梁的两端分别设有第二铰点,两个所述第二铰点至所述第一铰点的水平距离相等,所述第二铰点上铰接有二级平衡梁,所述二级平衡梁的两端分别设有第三铰点和第四铰点,所述第四铰点至所述第二铰点的水平距离为所述第三铰点至所述第二铰点的水平距离的二倍,所述第三铰点上铰接有三级平衡梁,所述三级平衡梁的两端分别设有第五铰点,两个所述第五铰点至所述第三铰点的水平距离相等,所述第四铰点与所述第五铰点的下方铰接有车轮组。
10.如权利要求9所述的弧线摆动装船机,其特征在于,所述车轮组包括车轮架,所述车轮架的中心点与所述第三铰点或所述第五铰点相铰接,所述车轮架上设有两个车轮,两个所述车轮的中心至所述车轮架中心点的水平距离相等。
11.如权利要求2至4中任一项所述的弧线摆动装船机,其特征在于,所述后臂架的下方设有第二行走台车,所述第二行走台车用于为所述后臂架提供在所述门座架上表面的滑动支撑,所述第二行走台车与所述第一行走台车的结构相同。
12.如权利要求1至4中任一项所述的弧线摆动装船机,其特征在于,所述海侧桩基上设有弧形支架,所述弧形支架上设有销齿轮,所述弧形支架与所述销齿轮用于与所述摆动驱动装置相配合实现对所述门座架的驱动,所述摆动驱动装置包括:
支撑架,与所述门座架相连;
第一电机,设于所述支撑架上;
第一齿轮,设于所述第一电机的驱动端,并与所述销齿轮相啮合;
滚轮,设于所述支撑架下方,用于为所述支撑架提供在所述海侧桩基上的滑动支撑;
水平轮,设于所述支撑架下方,所述水平轮的数量为多个,其分置于所述弧形支架的内外两侧,当所述门座架围绕所述回转支承进行摆动时,所述水平轮在所述弧形支架的内外两侧滚动,用于对所述门座架的运动进行导向和限位。
13.如权利要求2至4中任一项所述的弧线摆动装船机,其特征在于,所述门座架的上表面设有齿条,所述后臂架驱动机构包括:
第二电机,设于所述后臂架驱动机构上;
第二齿轮,设于所述第二电机的驱动端,并与所述齿条相啮合。
14.如权利要求2至4中任一项所述的弧线摆动装船机,其特征在于,所述俯仰驱动装置包括:
卷筒,设于所述后臂架上;
第三电机,设于所述后臂架上,用于驱动所述卷筒转动;
第一滑轮,设于所述立柱顶端;
第二滑轮,设于所述后臂架上;
钢丝绳,其一端缠绕于所述卷筒上,另一端从所述卷筒伸出后依次缠绕经过所述第一滑轮、所述第二滑轮,再绕回所述第一滑轮,最后端部固定于所述后臂架上;
当所述第三电机带动所述卷筒向收卷所述钢丝绳的方向转动时,所述钢丝绳向所述第一滑轮施加拉力,使所述立柱与所述前臂架围绕所述立柱与所述后臂架的铰接处转动,所述前臂架仰起。
15.如权利要求2至4中任一项所述的弧线摆动装船机,其特征在于,还包括防倾覆支架,所述防倾覆支架包括设于所述立柱上的移动支架和设于所述后臂架上的固定支架,当所述立柱仰起时,所述移动支架和所述固定支架相抵接。
16.如权利要求2至4中任一项所述的弧线摆动装船机,其特征在于,所述立柱顶部与所述前臂架之间设有至少一个拉杆。
17.如权利要求2至4中任一项所述的弧线摆动装船机,其特征在于,所述海侧桩基上方的一侧设有防风维修搁架,所述防风维修搁架用于支撑固定处于回缩状态的前臂架。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202022064704.9U CN213356301U (zh) | 2020-09-18 | 2020-09-18 | 一种弧线摆动装船机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202022064704.9U CN213356301U (zh) | 2020-09-18 | 2020-09-18 | 一种弧线摆动装船机 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN213356301U true CN213356301U (zh) | 2021-06-04 |
Family
ID=76153982
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202022064704.9U Active CN213356301U (zh) | 2020-09-18 | 2020-09-18 | 一种弧线摆动装船机 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN213356301U (zh) |
-
2020
- 2020-09-18 CN CN202022064704.9U patent/CN213356301U/zh active Active
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106144424B (zh) | 一种液压伸缩式输送臂 | |
| CN102674028A (zh) | 一种港口货物装船装置 | |
| CA2539326C (en) | Gondola tipping system | |
| CN110255226B (zh) | 一种门架式链斗卸船机 | |
| CN108466937B (zh) | 一种多功能集装箱搬运机 | |
| JP5270151B2 (ja) | 貨物コンテナ取扱ガントリークレーン用のワイヤロープリービング支持システム | |
| CN109775589B (zh) | 吊运卷扬机 | |
| CN213356301U (zh) | 一种弧线摆动装船机 | |
| CN106006095A (zh) | 一种节能环保移动装船机 | |
| CN114031004A (zh) | 一种吊运机 | |
| KR102124888B1 (ko) | 크레인의 평형추를 줄이기 위한 시스템 | |
| CN212197629U (zh) | 一种转驳平台散货装卸一体机 | |
| CN209939952U (zh) | 一种水渣装船机 | |
| CN114435993B (zh) | 一种轨道移动平行四连杆式链斗卸船机 | |
| CN217417963U (zh) | 一种竖井施工用起重机 | |
| CN102730575A (zh) | 岸边缆索起重机 | |
| CN209835098U (zh) | 一种装卸两用港口设备 | |
| CN209291440U (zh) | 输送设备 | |
| CN219566903U (zh) | 一种柱式升降、臂架俯仰的埋刮板卸船机系统 | |
| CN105584856A (zh) | 桥式伸缩装船机 | |
| CN217200971U (zh) | 一种升降装船机 | |
| CN220182189U (zh) | 一种可升降行走转向的便捷式散货装船机 | |
| CN104261144A (zh) | 一种穿越式双小车岸桥装卸系统及方法 | |
| CN215974047U (zh) | 装船机 | |
| CN114380243B (zh) | 一种超长堆垛机装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |