CN1942852B - 接触式传感器、接触式传感器系统和检测接触的方法 - Google Patents
接触式传感器、接触式传感器系统和检测接触的方法 Download PDFInfo
- Publication number
- CN1942852B CN1942852B CN2005800113884A CN200580011388A CN1942852B CN 1942852 B CN1942852 B CN 1942852B CN 2005800113884 A CN2005800113884 A CN 2005800113884A CN 200580011388 A CN200580011388 A CN 200580011388A CN 1942852 B CN1942852 B CN 1942852B
- Authority
- CN
- China
- Prior art keywords
- edge
- wave
- sound wave
- substrate
- touch sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 title description 8
- 239000000758 substrate Substances 0.000 claims abstract description 132
- 230000001902 propagating effect Effects 0.000 claims abstract description 19
- 238000000034 method Methods 0.000 claims description 18
- 235000019687 Lamb Nutrition 0.000 claims description 5
- 238000010897 surface acoustic wave method Methods 0.000 description 42
- 238000013461 design Methods 0.000 description 28
- 239000000463 material Substances 0.000 description 19
- 230000005540 biological transmission Effects 0.000 description 18
- 230000008878 coupling Effects 0.000 description 15
- 238000010168 coupling process Methods 0.000 description 15
- 238000005859 coupling reaction Methods 0.000 description 15
- 230000000712 assembly Effects 0.000 description 12
- 238000000429 assembly Methods 0.000 description 12
- 230000014509 gene expression Effects 0.000 description 12
- 238000006243 chemical reaction Methods 0.000 description 10
- 230000000644 propagated effect Effects 0.000 description 10
- 239000011521 glass Substances 0.000 description 9
- 230000033001 locomotion Effects 0.000 description 6
- 239000007767 bonding agent Substances 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 5
- 230000015572 biosynthetic process Effects 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 230000003071 parasitic effect Effects 0.000 description 4
- 230000000737 periodic effect Effects 0.000 description 4
- 238000007789 sealing Methods 0.000 description 4
- 230000002776 aggregation Effects 0.000 description 3
- 238000004220 aggregation Methods 0.000 description 3
- 239000000919 ceramic Substances 0.000 description 3
- 208000010247 contact dermatitis Diseases 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000005611 electricity Effects 0.000 description 3
- 230000005571 horizontal transmission Effects 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 230000024241 parasitism Effects 0.000 description 3
- 230000010363 phase shift Effects 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 2
- 239000004411 aluminium Substances 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 230000002950 deficient Effects 0.000 description 2
- 239000008393 encapsulating agent Substances 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 239000003822 epoxy resin Substances 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000003754 machining Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000005457 optimization Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000010287 polarization Effects 0.000 description 2
- 229920000647 polyepoxide Polymers 0.000 description 2
- 238000007639 printing Methods 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- 230000004447 accommodation reflex Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 239000011230 binding agent Substances 0.000 description 1
- 239000005388 borosilicate glass Substances 0.000 description 1
- 230000001427 coherent effect Effects 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 230000001143 conditioned effect Effects 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000005401 electroluminescence Methods 0.000 description 1
- 238000005538 encapsulation Methods 0.000 description 1
- 239000003344 environmental pollutant Substances 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000004438 eyesight Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 238000011049 filling Methods 0.000 description 1
- 238000010304 firing Methods 0.000 description 1
- 239000012634 fragment Substances 0.000 description 1
- 230000008676 import Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 238000000608 laser ablation Methods 0.000 description 1
- 238000004093 laser heating Methods 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- 210000003141 lower extremity Anatomy 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000003534 oscillatory effect Effects 0.000 description 1
- 238000012856 packing Methods 0.000 description 1
- 238000000059 patterning Methods 0.000 description 1
- 230000008447 perception Effects 0.000 description 1
- 238000005498 polishing Methods 0.000 description 1
- 231100000719 pollutant Toxicity 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 238000001556 precipitation Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000002310 reflectometry Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 229920002379 silicone rubber Polymers 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000008646 thermal stress Effects 0.000 description 1
- 238000007669 thermal treatment Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000005945 translocation Effects 0.000 description 1
- 239000013598 vector Substances 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images
















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/043—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means using propagating acoustic waves
- G06F3/0436—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means using propagating acoustic waves in which generating transducers and detecting transducers are attached to a single acoustic waves transmission substrate
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0416—Control or interface arrangements specially adapted for digitisers
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- General Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Position Input By Displaying (AREA)
- Switches That Are Operated By Magnetic Or Electric Fields (AREA)
- Micromachines (AREA)
- Transducers For Ultrasonic Waves (AREA)
Abstract
接触式传感器包括能够传播声波的衬底并且包括具有接触灵敏区的第一表面。第一侧壁沿着第一边缘和第一表面相交。第一边缘配置为沿着第一边缘传播第一声波。第一声波可以是一维边缘波。波转换器将第一声波转换为第二声波并且第一表面配置为传播第二声波横过接触灵敏区。
Description
相关申请的交叉引用
本申请涉及标题为“声音接触式传感器(Acoustic TouchSensor)”、申请日为2004年4月14日的美国临时专利申请序列号60/562,461,以及标题为“声音接触式传感器(Acoustic TouchSensor)”、申请日为2004年4月14日的美国临时专利申请序列号60/562,455,这里将其公开的内容在此一并引用。
发明背景
发明领域
本发明涉及接触式传感器,尤其是具有窄的功能边界和增加的接触敏感区域的声音接触式传感器以及声音触摸屏。
本发明的引言
声音接触式传感器具有接触敏感区,在其上接触的存在和位置是通过对接触式传感器衬底上的声波传输接触的影响而感知的。声音接触式传感器可以使用瑞利波(Rayleigh wave)(包括准瑞利波)、拉姆(Lamb)波或切变波,或不同类型声波的组合。
附图1示出传统的声音接触式传感器(声音触摸屏1)的操作。所述触摸屏1具有接触敏感区2,在其中确定接触的二维坐标。例如,接触敏感区2可以包括通过虚线框16界定的区域,其表示聚光圈(bezel)10的内部边界。第一传播换能器3a位于接触敏感区2之外并且声学地耦合到触摸屏1的表面。换能器3a发送以声波11a形式的声信号,其平行于触摸屏1的顶部边缘并且一般位于触摸屏1的平面内行进。和声波11a传输路径对准的是部分声学反射的元件4的第一线性阵列13a,其中的每个元件部分地传输声信号并且部分反射它们(大约90°的角度),创建横过接触敏感区2垂直行进的若干声波(例如5a,5b和5c)。借助增加到第一发射器3a的距离,反射元件4的间距是可变的以补偿声信号的衰减。同时公知的是即使反射元件4是均匀间隔的,信号均衡可以通过变化反射元件4的反射强度获得。声波5a、5b和5c在达到触摸屏1的下边缘时由部分声学反射元件4的第二线性阵列13b再次反射大约90°的角度(参见箭头11b)朝向第一接收换能器6a的方向。在接收换能器6a,所述波被检测并且转换为电信号用于数据处理。同样配置的反射元件沿着触摸屏1的左和右边缘定位。第二传播换能器3b沿着左边缘产生声波12a,而部分声学反射元件4的第三线性阵列13c创建横过接触敏感区2水平行进的若干声波(例如7a、7b和7c)。声波7a、7b和7c沿着12b由部分声学反射元件4的第四线性阵列13d重定向朝向接收换能器6b的方向,在那里它们被检测并且转换为电信号用于数据处理。
如果接触敏感区2在位置8由诸如手指或触针的对象接触,那么声波5b和7a的一部分能量为接触对象所吸收。产生的衰减由接收换能器6a和6b检测为声信号中的扰动(perturbation)。借助于微处理器(未示出)数据的时间延迟分析允许确定接触位置8的坐标。附图1的设备还可以起仅仅具有两个换能器的触摸屏的作用,其使用发射/接收换能器方案。
在附图1中由虚线表示的外壳9可以是与触摸屏1有关。外壳可以由任何合适的材料组成,例如模制的聚合物或金属片。外壳9包括聚光圈(bezel)10,其由附图1中的虚线16和虚线17表示,所述虚线16表示聚光圈10的内部边界,而虚线17表示聚光圈10的外部边界。内部虚线16显示了外壳9覆盖触摸屏1的外围,隐藏发射和接收换能器、反射元件及其它部件,但是暴露出接触敏感区2。这种配置可以防止隐藏的部件遭到污染和/或损害,提供了美观的外观并且为定义了用户的接触敏感区。
触摸屏可以包括覆盖在显示器面板上的单独的面板。所述面板一般由玻璃构成,但是可以使用任何其它合适的衬底。显示板可以是阴极射线管(CRT)、液晶显示器(LCD)、等离子体、电致发光、有机发光二极管(OLED)显示器或任何其它类型的显示器。
如附图1所示,接触敏感区2由边界区域15包围,其中设置有反射元件4和发射和接收换能器3a、3b、6a和6b。边界区域15宽度的减小增加了接触敏感区2。对于使用诸如触摸屏透明的接触式传感器的接触式传感器应用,边界的宽度尤其是重要的。具有窄的边界区域15的接触式传感器可以集成到在显示图象周围本身具有窄的边界 的显示监视器中。这种特点为一般市场趋势所需要,所述趋势为诸如监视器的设备朝着圆滑并且更加机械紧凑的方向设计。具有窄的边界区域15的接触式传感器此外更加容易地密封并且是更轻的,还可以具有加大的传感器区域。在触摸屏技术竞争当中,(例如声音、电容、电阻和红外线的)声音触摸屏倾向于具有更宽的边界。
通过使用波导以在边界区域集中声波来减小触摸屏边界区域是可能的,如美国专利号6,636,201所公开的,这里将其公开的内容一并引用至此。然而,可以期望得到不需要在接触式传感器衬底的接触表面上提供波导的替代办法。
因为上述原因,具有能够容纳很窄的边界区域新的声音接触式传感器设计是合乎需要的。
发明概要
在一个实施例中,接触式传感器包括衬底。所述衬底能够传播声波并且包括具有接触灵敏区的第一表面。第一侧壁沿着第一边缘和第一表面相交。第一边缘配置为沿着第一边缘传播第一声波,并且第一表面配置为横过接触灵敏区传播第二声波。波转换器将第一声波转换为第二声波,并且第二声波以第一声波为基础。任选的,波换能器可以是相干地散射并且模式变换第一声波为第二声波的反射阵列。
在另一个实施例中,接触式传感器系统包括用于产生一维第一声波的发射器。接触式传感器包括能够传播声波的衬底。所述衬底包括具有接触灵敏区的第一表面。第一和第二侧壁沿着第一和第二边缘和第一表面相交。第一边缘配置为传播第一声波,并且第一表面配置为横过接触灵敏区传播第二声波。第一转换器提供在衬底上用于将第一声波转换为第二声波。检测器提供在所述衬底上用于检测横越接触灵敏区的至少一部分以后的第二声波。第二声波的这种检测可以是直接或间接的。
在另一个实施例中,提供一种用于检测能够传播声波的衬底的接触灵敏区上接触的方法。衬底包括具有接触灵敏区的第一表面。衬底的第一和第二侧壁沿着第一和第二边缘和第一表面相交。所述方法包括沿着第一侧壁传输一维第一声波。第一声波转化为第二声 波。第二声波沿着第一表面被引导通过接触灵敏区。第二声波最接近所述衬底在第二侧壁被检测。第二声波的这种检测可以是直接或间接的。
在另一个实施例中,接触式传感器包括能够传播声波的衬底。所述衬底包括具有接触灵敏区的第一表面和沿着第一边缘和第一表面相交的第一侧壁。第一边缘配置为沿着第一边缘传播第一声波,并且第一表面配置为横过接触灵敏区传播第二声波。第二声波以第一声波为基础。接触式传感器更进一步的包括具有形成在所述衬底上的反射元件用于第一和第二声波之间波型转换的反射阵列。第一边缘可以形成弯曲区域。接触灵敏区具有是平、弯曲和半球中的一个的表面。衬底可以进一步包括沿着四个边缘和第一表面相交的四个侧壁,并且和相邻侧壁形角。换能器装配在每个角上用于产生或接收声波,而反射阵列最接近四个边缘中的每一个安装。至少两个换能器可以装配到衬底并且用于产生或接收声波。接触灵敏区接收具有识别接触事件位置的两个坐标的接触事件。第一和第二换能器可以装配到衬底以产生并且接收声波用于分别检测接触灵敏区上接触事件的第一和第二坐标。任选的,至少两个换能器可以装配到衬底,其中至少一个换能器用于产生和接收声波以检测接触事件的坐标。换能器装配到衬底用于产生和接收整个或一部分接触灵敏区之一上的声波。在另一个实施例中,基本上无缺陷地形成的第二侧壁沿着第二边缘和第一表面相交。第二边缘在第二侧壁和第一表面之间形成大约90°的角度,并且第二边缘反射在横越接触灵敏区至少一部分以后的第二声波。替代地,一个或多个反射条最接近第二边缘形成并且互相间隔第二声波二分之一波长的整数倍。在横越接触灵敏区至少一部分以后反射条和第二边缘反射第二声波。
在另一个实施例中,接触式传感器包括能够传播声波的衬底。所述衬底包括具有接触灵敏区的第一表面和沿着第一边缘和第一表面相交的第一侧壁。第一边缘配置为沿着第一边缘传播第一声波,并且第一表面配置为传播第二声波横过接触灵敏区。第二声波以第一声波为基础。反射阵列包括最接近第一边缘形成在所述衬底上用于第一和第二声波间波型转换的部分反射元件。部分反射元件可以由向衬底添加材料以形成凸出部或从衬底中除去材料以形成凹槽来形成。替 代地,部分反射元件的第一部分可以由向衬底添加材料来形成而第二部分可以通过从衬底中除去材料来形成。部分反射元件相对于彼此有规则间隔地形成,并且可以沿着第一侧壁和第一表面中的至少一个延伸。另外,部分反射元件距第一边缘的长度小于第一声波的波长。第一组规则间隔的部分反射元件相对于第一声波一个波长的周期(period)具有相当强的(strong)傅里叶分量以及同时相对于第一声波二分之一波长的周期(period)具有最小傅里叶分量。替代地,反射阵列可以由第一和第二组规则间隔的部分反射元件形成,其中第二组相对于第一组移位第一声波的四分之一波长,并且第一和第二组互相重叠。部分反射元件可以形成为沿着第一边缘具有大约第一声波二分之一波长的宽度。
在另一个实施例中,接触式传感器包括能够传播声波的衬底。所述衬底包括具有接触灵敏区的第一表面和沿着第一边缘和第一表面相交的第一侧壁。第一边缘配置为沿着第一边缘传播第一声波,并且第一表面配置为传播第二声波横过接触灵敏区。第二声波以第一声波为基础。接触式传感器进一步的包括用于产生以及接收声波的换能器,其包括压电元件以及用于第一和第二声波间波型转换的反射阵列。换能器可以包括沿着第一边缘定位的衍射光栅、最接近第一边缘形成在第一侧壁上衍射光栅、或最接近第一边缘形成在第一表面上的衍射光栅。衍射光栅可以包括以大约第一声波的一个波长间隔的一系列凹槽。任选的,衍射光栅包括以大约第一声波的一个波长间隔的、在衬底中形成的一系列凹槽。替代地,衍射光栅包括在压电元件中形成的一系列凹槽。压电元件可以是压力模式压电体以及切变模式压电体中的一个。换能器可以进一步包括接合到压电元件的楔元件。楔元件装配在第一侧壁以及第一表面中的一个上,以及光栅最接近楔元件定位在第一边缘上。替代地,楔元件可以是装配在第一侧壁上以及相对于平行于第一表面的平面形成锐角,以及包括衬底中规则间隔的凹槽的光栅最接近楔元件形成在第一边缘上。任选的,有角度的凹口可以通过从衬底中删除材料来形成,并且接合到压电元件的楔元件装配在有角度的凹口内。在另一个实施例中,换能器装配在沿着第二边缘和第一表面相交的第二侧壁上,第二侧壁形成垂直于第一声波传播方向的平面。装配在第二侧壁上的换能器的压电元件可以是切变模式压 电体。任选的,切变模式压电体可以具有相对于接触表面大约45°的成极(poling)方向。在另一个实施例中,压电元件更进一步的包括前侧和背侧。第一和第二电极可以应用于覆盖压电元件前侧和背侧的一部分或者基本上所有部分,形成对应于第一和第二电极重叠的压电元件区域的有效区域。替代地,换能器接合到衬底,其中接合对应于有效区域的一部分并且在小于第一声波一个波长平方的区域提供到衬底和换能器的强的声耦合。任选的,第一电极应用于覆盖前面的至少一部分而第二电极应用于覆盖前侧和背侧的至少一部分,其中在前侧上的第一和第二电极接收到第一和第二电连接的附着用于激发压电元件。压电元件更进一步的包括和前侧和背侧中的每一个相交的第二边缘。第二边缘邻近第一边缘并且占有垂直于第一边缘的平面。前侧和背侧中的一个形成为装配到衬底并且压电元件在垂直于平行于前侧和背侧平面的方向成极。第一和第二电极形成在第一和第二边缘上,并且第一和第二电极接收到第一和第二电接触的附着用于激发压电元件。在另一个实施例中,压电元件装配到衬底,压电元件一部分延伸超出第一表面和所述侧壁中的至少一个。替代地,延伸超出第一表面和侧壁中的至少一个的压电元件的部分延伸小于第一声波一个波长的距离。
附图的简短描述
上述概述以及以下本发明某些实施例的详细说明,结合附图阅读时将会更好的得以理解。应该理解的是本发明不局限于附图所示的配置和机构。
附图1示出传统的声音接触式传感器(声音触摸屏1)的操作。
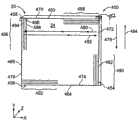
附图2示出根据本发明实施例具有接触表面和侧壁的接触式传感器衬底。
附图3示出根据本发明实施例形成为扰动沿着边缘波传播的边缘波的部分反射阵列。
附图4示出根据本发明实施例附图3中的反射元件子集(subset)的透视图。
附图5示出根据本发明实施例附图3中反射元件子集的备 选方案透视图。
附图6示出根据本发明实施例接触表面上形成的反射器元件。
附图7示出根据本发明实施例具有规则间隔的反射元件的触摸屏。
附图8示出根据本发明实施例其最小化边缘波背反射(back reflection)的反射器阵列设计。
附图9示出根据本发明实施例包括沿着衬底边缘形成的一系列周期性间隔的凹槽的光栅。
附图10示出根据本发明实施例光栅的透视图。
附图11示出根据本发明实施例具有绕回电极的压电元件,其可以和衍射光栅结合使用以包括换能器。
附图12示出根据本发明实施例施加到附图11第一和第二电极的交流电信号。
附图13示出根据本发明实施例接合到衬底侧壁的压电体。
附图14示出根据本发明实施例边缘波换能器,其包括接合在衬底侧壁中的光栅之上的压电体。
附图15示出根据本发明实施例包括切变模式压电元件(切变模式压电体)的边缘波换能器设计。
附图16示出根据本发明实施例备选方案压电体。
附图17示出根据本发明实施例在压电元件相对的侧壁上具有前和后电极的压电体。
附图18示出根据本发明实施例备选方案压电体。
附图19示出根据本发明实施例装配到衬底侧壁的楔换能器。
附图20示出根据本发明实施例倾斜于边缘的楔换能器组件。
附图21示出根据本发明实施例装配到衬底的楔换能器组件。
附图22示出根据本发明实施例备选方案压电体。
附图23示出根据本发明实施例装配到衬底的压电体。
附图24示出根据本发明实施例形成的边缘波接触式传感器系统。
附图25示出根据本发明实施例的接触面板。
附图26示出根据本发明实施例的接触面板。
附图27示出根据本发明实施例包括四个压电体的大型接触面板。
附图28示出根据本发明实施例与计算机相互连接的接触监视器的方框图。
附图29示出根据本发明实施例圆形桌面(round tabletop)的实例。
附图30示出根据本发明实施例形成的沿衬底约90°边缘的边缘波包传播。
附图31示出根据本发明实施例形成的备选方案边缘波接触式传感器系统。
附图32示出根据本发明实施例其中单个发射换能器产生X和Y信号的接触式传感器。
附图33示出根据本发明实施例其中单个发射换能器产生X和Y信号的备选方案接触式传感器。
附图34示出根据本发明实施例接近通用的发射换能器衬底的几何结构。
附图35示出根据本发明实施例备选方案几何方案。
发明的详细说明
如附图1所示传统的反射阵列宽度13a-13d范围在大约5mm和15mm之间,其对应于大约9-26个声音波长的范围(假定大约5MHz的传统的频率,对应于大约0.57mm的波长)。具有较窄宽度的反射阵列一般用在较小的屏幕中。
声表面波集中二维平面附近的声能。表面可以被称作引导所述波,如果表面是平的或甚至如果表面具有细微的曲率,声表面波在表面附近传播而不远离表面扩散。一维边缘声波是一种声波。一维边缘声波可以称为边缘波、弯曲边缘波或线声波。边缘波的波能定位在表面的边缘周围并且在垂直于所述边缘的方向大约按指数规律地衰 减。因此,能量矢量沿着所述边缘传播。边缘波是非分散的;它们的速度与频率无关。在接触式传感器中使用非分散的波是有利的,这是因为声波的传播不会将接收信号接触引起的扰动从它们简单的倾斜(dip)形状扭曲为更加复杂的振荡(oscillatory)形状。
边缘波能量的主要部分在限定边缘的约90°角落的一个波长内。由于能量远离所述边缘指数地衰落,超出边缘两个波长基本上不会发现能量。对于在玻璃中具有大约5MHz频率的边缘波,这意味着边缘波限制在大约边缘1mm的范围内。对于2mm厚度的玻璃板,边缘波可以沿着侧壁的顶部边缘传播而不受仅仅距离2mm侧壁底部边缘的存在的影响。由于边缘波能量限制在大约边缘的1mm处,使用边缘波技术制造具有很窄的功能边界的接触式传感器是有可能的。因此,用于包括边缘波的接触式传感器的外壳可以具有很窄的聚光圈区域,并且可以增加接触式传感器的接触敏感区。
附图2示出根据本发明实施例具有接触表面24和侧壁32的接触式传感器衬底20。任何合适的材料可以用于衬底20,包括玻璃、陶瓷和金属(例如铝或钢)。对于某些应用,可以要求低声损耗的玻璃。例如,硼硅酸盐玻璃具有低损耗,并且可以提供可以又允许较大接触式传感器区域的加大的接收信号振幅。
整齐的边缘22在对应于接触表面24的平面和对应于每一侧壁32的平面之间的交叉处形成在所述衬底20上。形成整齐的边缘22大体上无缺陷,使得整齐的边缘22上的任何偏差,例如碎片、条痕、凹痕、不规则区域等等具有小于声音波长的尺寸。对于给定的频率,边缘波波长比更加公知的瑞利波的波长仅仅少几个百分比。因此,利用瑞利波长作为公知的和定义的测量,人们注意到缺陷优选小于瑞利波长的20%。
整齐的边缘22可以通过任何适用于制造衬底20的材料的方法来形成。例如,可以切割并且机械加工玻璃以提供整齐的边缘22。替代地,通过使用热应力传递受控断裂形成所述整齐的边缘22,例如通过利用定位激光加热和气体喷流冷却过程。任选的,玻璃如果小心地执行划线和断开,可以产生相对划线表面的整齐的边缘。
在侧壁32邻接接触表面24处形成的角度42和44为90°或在90°的20°内,使侧壁32垂直于或基本垂直于接触表面24。仅仅 举例来说,对于具有比90°少得多的角度42或44的边缘22,可以存在具有不同速度的多边波型。然而,如果边缘22具有90°的±10°的角度42或44,边缘22将会仅仅支持单个边缘波模式。由于它消除了在边缘波沿着边缘22传播时模式混合的可能性,因此这是合乎需要的。
相对的边缘26在对应于衬底20的第二表面的平面和对应于每一侧壁32的平面之间的交点处形成在所述衬底20上。相对的边缘26不必是整齐的,除非还希望利用第二表面28作为接触表面。只要要求一个接触表面,那么通过仅仅在接近于一个表面形成整齐的边缘可以最小化制造时间或成本。
附图30示出根据本发明实施例沿着衬底20大约90°边缘传播的边缘波包580。边缘波在所述X轴方向传播,如附图30所示。在边缘波经过时材料运动(即衬底20内原子的运动)的主要分量垂直于传播方向X并且对于Y和Z方向成45°。为了清楚在附图30中已经放大了材料的偏转(deflections)。注意边缘波包580中的大多数的能量包含在沿着接触表面24和侧壁32距离90°边缘22的边缘波波长内。
附图3示出根据本发明实施例形成部分反射阵列30以扰动沿着边缘22传播的边缘波。转换器(未示出)用于在电信号和声波之间转换并且将在以下详细描述。对于接触式传感器系统,通常电信号将在控制器和换能器之间传输以产生和/或接收声信号。
反射阵列30包括最接近整齐的边缘22间隔的反射元件34以扰动沿着边缘22传播的边缘波。第一波,一维边缘波沿着边缘22产生和传播并且是在边缘22的一个波长内。反射阵列30可用于将边缘波转换为第二声波,或二维平面声波(SAW),其横过衬底20的接触表面24传播。反射阵列30是可逆的,因此还可以用于将第二声波转换为第三声波,或一维边缘波。第二声波可以是任何类型的波,其在二维的接触表面之上提供足够的接触灵敏度,包括像瑞利波(其中术语意味着包括准瑞利波)的表面约束波(surface bound wave)和板波(例如Lamb和切变波)。附图3中的反射元件34是沿着边缘22有规则地(周期性地)间隔开的,并且可以沿着Y轴(如附图3所示的)沿衬底20的侧壁32延伸和/或扩展到水平接触表面24中。如以下讨论的,反射元件34可以通过沉淀材料或者删除一部分衬底20来 形成。
由于边缘波沿着边缘22行进并且遇到每一个反射元件34,边缘波被部分地传输到达下一个反射元件34,由反射元件34部分吸收或散射,并且由反射元件34通过90°散射和一维边缘边缘波和二维瑞利表面声波(SAW)之间波型转换部分地转换为约束到表面24的瑞利波。
图4示出根据本发明实施例的图3中反射元件34的子集36的放大图。示出反射元件34作为突出的反射元件86。反射元件86周期性地间隔开距离48,所述距离48大约为沿着边缘22行进的边缘波(λE)的波长。因此,由反射元件86波型转换发出的表面瑞利波将被互相同步。很多可能的形状可用于反射元件86。作为一个具体的实例,反射元件86在形状上可以是长方形,具有沿着X轴大约λE/2的宽度40、沿着Y轴大约或者小于λE的高度38,以及沿着Z轴比λE小得多的深度46,例如小于λE的几个百分比。举例来说,反射元件86的深度46尺寸沿着Z轴从侧壁32的外表面向外延伸。反射元件86的顶部边缘80可以形成为与边缘22齐平或在边缘22的距离82内。
所述反射元件86可以由任何合适的材料组成。例如可以使用烧制陶瓷(玻璃熔块)。替代地,反射元件86可以包括负载聚合物可紫外线固化的墨水,例如美国专利5,883,457公开的,引用其包括的内容至此。有效载荷聚合物可紫外线固化的墨水的一个实例是装载无机粒子的,然而由于它的聚合基质与衬底20相比是软的。包括这种负载聚合物墨水的反射元件86将会引起仅仅次要的刚性扰动并且将会经过大量负荷或惯性作用主要地耦合。因此,可以制造实际上主要是大量负荷的反射元件。反射元件86可以通过任何合适方法形成在所述衬底20上,例如通过丝网印刷、填充印刷、喷墨处理、微分配等等的沉淀。
图5示出了根据本发明实施例的反射元件34的子集36的替换放大图。在附图5中,示出反射元件34作为凹槽反射元件88。反射元件88可以通过沿着侧壁32去除衬底20的小的区域以形成凹槽或凹口来形成。如先前示出的,反射元件88周期性地间隔开距离48,所述距离48大约为沿着边缘22行进的边缘波(λE)的波长。反射元件88可以具有任何各式各样的形状,例如反射元件88在形状上可以是长 方形,具有沿着X轴大约λE/2的宽度40、沿着Y轴大约或者小于λE 的高度38,以及沿着Z轴比λE小得多的深度84,例如小于λE的几个百分比。反射元件88的深度84尺寸沿着Z轴从侧壁32的外表面向内延伸。
与由附图4讨论的可紫外线固化的墨水的材料组成的凸出反射元件86相比,其引起仅仅次要刚性扰动和主要经过大量负荷或惯性作用耦合,凹槽反射元件88耦合到边缘波作为更多在衬底中刚性的扰动。反射元件88可以利用其它材料反填充以调谐反射元件88的大量负载和刚性扰动特征,例如软的、负载聚合物。
图6示出了根据本发明实施例在接触表面24上形成的反射元件34。反射元件34周期性地间隔开距离48,所述距离48大约为沿着边缘22行进的边缘波(λE)的波长。反射元件34具有沿着X轴大约λE/2的宽度40、沿着Z轴大约或小于λE的高度38以及沿着Y轴的深度(未示出)。如上所述,如果反射元件34由添加的材料形成深度尺寸可以从接触表面24的外表面向外延伸,或如果反射元件34是从衬底20除去材料形成,则从接触表面24的外表面向内延伸。任选的,反射元件34可以形成在接触表面24以及侧壁32上,例如通过将附图3的反射元件34和附图6的反射元件34组合起来。
由于在距离所述边缘22一个波长以上时边缘波功率密度非常接近于零,所以远离一个波长以上的结构基本上不耦合到所述边缘波。相反,边缘22的任何扰动以及接触表面24或侧壁32上边缘22的一个波长以内的任何扰动将会散射边缘波能量。因此,通过变化反射元件34的特性(大量负荷、刚性扰动等等)、几何结构以及位置,可以调谐边缘波以及不同的其它声模(瑞利波、拉姆波、切变波等等)之间耦合的相对强度。
边缘波以及瑞利波之间耦合是使人感兴趣的。高接触灵敏度以及缺少分散使得瑞利波作为接触传感声模是有吸引力的。此外,瑞利波以及边缘波的深度剖面是非常相似的从而使比边缘波耦合到其它模式更加容易的强的以及择优的耦合到瑞利波。数字模拟可以用来最佳化所述扰动设计以最佳化耦合到瑞利波的边缘波或耦合到备选的接触敏感声模。
反射元件34想要的特性部分地取决于想要的接触传感声 模。每个单独的反射元件34是用来仅仅反射λ射边缘波能量的一小部分,因此在附图5凹槽的反射元件88的情况下,到衬底20的深度84通常比λE小很多,例如约一个波长的百分之一或几个微米,并且可被调节来获得声损耗以及一维边缘边缘波和二维平面声波之间转换效率之间的想要的权衡。
反射阵列30可被设计为将边缘波耦合到瑞利波,该瑞利波以斜角(diagonal angle)而不是垂直于边缘22横过接触表面24传播。可以调节反射元件34之间的距离48以调谐反射角度。如果s表示距离48而θ是边缘22的法线和瑞利波传播方向之间的角度,在角度θ处相干散射的条件是:
s sin(θ)=s(λR/λE)-nλR,
其中n是整数,λR表示瑞利波波长,λE表示边缘波波长。
图7示出了根据本发明实施例具有规则间隔开的反射元件34的触摸屏128。为简单起见,示出反射元件34在四个边缘22的仅仅两个上,即用于发射反射元件阵列176和接收反射元件阵列178。应该理解的是反射元件34可以形成为如附图3-6所述。反射元件34周期性地间隔开距离48,所述距离48大约为沿着边缘22行进的边缘波(λE)的波长。
箭头164、174和166示出从发射换能器162到接收换能器168想要的声音路径。在附图7还示出导致在接收换能器168处扰动信号不想要的声音路径。不想要的声音路径起因于由反射器阵列176和178边缘波的180°的反向散射。具有对到边缘波SAW的90°散射需要的波长间隔(距离48)的规则地间隔的反射元件34的阵列也可能导致边缘波180°的反向散射。
第一边缘波由发射换能器162沿着边缘22沿箭头164的方向传播。边缘波由发射反射元件阵列176的反射元件34转换为沿箭头174方向横过接触表面24行进的SAW波。来自发射换能器162边缘波能量中的一些将会继续如箭头184所示沿着边缘22传播。如果反射元件34反向散射边缘波180°,沿箭头185方向将产生不想要的边缘波。这种不想要的边缘波在90°散射和模式变换,从而对瑞利波(箭头174) 贡献不想要的延迟贡献,最终导致在接收换能器168的寄生的干扰信号。
此外,180°边缘波反向散射也在接收反射元件阵列178处产生不想的寄生。想要的SAW波(箭头174)由接收反射元件阵列178的有规则地间隔的反射元件34转变为两个边缘波。因此,创建了在箭头方向166行进到接收换能器168的第二边缘波和在箭头方向186行进的不想要的寄生的边缘波。寄生的边缘波然后可以由反射元件34朝着接收换能器168的方向反向散射180°,如箭头187所示。用这样的方式设计反射元件34以最小化180°边缘波反向散射,以便最小化附图7所示的寄生路径的振幅是合乎需要的。
附图8示出根据本发明实施例最小化边缘波背反射(backreflection)的反射器阵列设计150。这种设计适用于例如附图7对象(item)176和178的发射与接收阵列。示出第一和第二反射元件152和154在衬底20的接触表面24上,但是应该理解的是第一和第二反射元件152和154可以形成在侧壁32上,除接触表面24之外或代替接触表面24。此外,第一和第二反射元件152和154可以形成为凹槽或凸出部。第一反射元件152互相以边缘波的1个波长间隔。将第二反射元件154相对于第一反射元件152移位距离182,所述距离大体上相等于边缘波的四分之一波长。第一和第二反射元件152和154具有小于四分之一波长、等于四分之一波长或大于四分之一波长的宽度180,而在这样情况下反射元件152和154是重叠或叠加的。
换句话说,反射器阵列设计150可以由第一设计第一反射元件152创建,不考虑抑制边缘波180°背反射的需要。第一反射元件152然后移位四分之一波长(在二者之一方向)以创建第二反射元件154。第二反射元件154然后叠加在第一反射元件152上。
当边缘波沿着边缘22沿箭头156方向传播时,由第一反射器152创建SAW波158和反射波170。SAW波160和反射波172由第二反射器154创建。因此,以90°创建两个SAW波而在对于边缘波传播方向的180°创建2反射边缘波。
反射波170和172具有额外二分之一波长路径并由此具有180°相对相移,其大体上删除或最小化180°背反射。SAW波158和160之间存在四方之一波长延迟,其创建两个波之间仅仅90°的相移,这没 有导致移除散射振幅。换句话说,如果沿着边缘22相邻第一和第二反射元件152和154之间距离在四分之一和四方之三波长之间交替变化,那么180°反向散射将受到抑制而90°边缘SAW耦合不会受到抑制。
只作为实例,使坐标x表示图8所示沿边缘22的距离。假设P(x)表示反射器152散射强度的周期变化。P(x)傅里叶展开为P(x)=∑Pn*exp(i(2πn/λ)x)。
以下,考虑用于根据傅里叶系数Pn的最小180°背反射的条件。(这种讨论可以概括为这种情况,即反射器152的强度随信号均衡希望的距换能器的距离逐渐地增加。在这种情况下,假设r(x)是与x有关的缓慢变化反射器的强度权重,以及假设R(x)=r(x)*P(x),其中P(x)是描述每个凹槽详细形状的周期函数P(x)=P(x+λ)。)
在90°SAW到边缘波的散射(在箭头方向158和160)起因于槽形状的傅里叶级数中的n=±1项而边缘波180°反向散射(沿箭头170和172方向)起因于傅里叶级数的n=±2项。如果傅里叶级数中的n=±2项被消除,沿箭头170和172方向边缘波的不受欢迎的反向散射可以被消除。
消除傅里叶级数中的n=±2项的一个方式是以具有非零基数n=±1分量的任意的周期函数P(x)开始,所述部件按需要将SAW和边缘波耦合,将模式移位四分之一波长并且将这个叠加到原是模式P(x)->P′(x)={P(x)+P(x+λ/4)}或者根据傅里叶分量Pn->P′=(1+in)Pn,以便对于n=±2有P′n=0而不是n=±1。
参考附图4和5,反射元件86和88是二分之一波长宽并且以1个波长间隔分离。这对应于附图8的情况,其中第一和第二反射元件152和154每个是四分之一波长宽并且以1个波长间隔分离。当复制第一反射元件152时,移位四分之一波长并且叠加,结果是具有二分之一波长的宽度40并且以一个波长的距离48分开定位的一系列反射元件86或88。
换能器可以用来将电信号转换为沿着边缘22传播的声音边缘波。换能器组件的一个实例是协同光栅元件的压电元件,其中光栅元件配置在压电元件和媒体之间,例如衬底20,其中传播产生的声模。光栅充当为将声能从换能器耦合到衬底20上的声波的衍射元件。
附图9示出根据本发明实施例包括沿着衬底20的边缘22 形成的一系列周期性间隔的凹槽52的光栅50。凹槽52可以使用任何合适制造方法在衬底20中形成,例如机械加工、蚀刻、激光烧蚀、磨光、图案化、模制等等。
[00881图10示出了根据本发明实施例的光栅50的放大图。沿着凹槽52Y轴的高度54近似等于或小于边缘波λ的一个波长。沿着Z轴凹槽52的深度58近似等于或远小于边缘波λE波长。所述凹槽52以距离74间隔开,所述距离近似等于边缘波λE的波长。沿着X轴凹槽52的宽度56大约是边缘波二分之一波长、或者λE/2。所述光栅50的设计和反射器阵列的设计有许多共同之处,所述反射器阵列包括附图5所示的凹槽反射元件88,其都起到相干地耦合到边缘波相似的作用。主要的差别在于耦合的强度。对于有效换能器设计,光栅50必须激发或提取光栅50短长度中的边缘波的大部分能量,而附图3中的反射器阵列30将边缘22大部分长度上的边缘波和瑞利波之间的耦合展开。结果,光栅50中的深度58一般地显著地比附图5中的深度84更深。
附图11示出根据本发明实施例具有绕回电极的压电元件90,其可以协同衍射光栅使用以包括换能器。第一电极64呈现在压电元件90正视图66的较低区域65上并且从压电元件90的底部76卷绕到压电元件90的背面70。第二电极72呈现在压电元件90正视图66的较上区域73上。第一和第二电极64和72可以由银玻璃料、印刷的镍或任何其它导电材料组成。
包括压电元件90以及电极64和72的组件通常称为压电体(piezo)60。压电元件90是压力模式压电元件。PZT(铅-锆-钛酸盐陶瓷)是用于制造压电元件的普通材料,但是还可以使用例如聚合物PVDF和无铅陶瓷的其它压电材料。压电体60有效区的高度和边缘波的垂直断面相互匹配,即近似等于或者小于λE。当电压施加到电极72和64仅仅夹在电极72和64之间的压电材料被激发时,压电体60的有效区由电极72的几何结构确定。为了便于加工,便利的是压电体尺寸62可以延伸超出有效区由此允许比边缘波波长λE大得多。
附图12示出根据本发明实施例施加到附图11第一和第二电极64和72的交变电信号96。绕回第一电极64和第二电极72的几何结构使得仅仅压电体60的上部区域73是电学上有效的。
压电元件90一般地具有对应于在工作频率压电材料中的声波二分之一波长的厚度78。(为了清楚,电极64和72的厚度在附图12中被夸大。)对于压力模式压电体60运行在大约5MHz,厚度78一般是大约400μm。到第一和第二电极64和72的电连接可以使用任何合适方法产生,例如通过弹簧接触、焊料、导电的环氧树脂(例如银负载),或具有定向传导性的导电粘合剂(例如,具有仅仅垂直于电极64和72平面具有显著传导性的Z轴粘合剂)。确定连接方法的考虑因素包括低电阻结、低电磁扰动和磁化率、高可靠性、低成本等等。
附图13示出根据本发明实施例接合到衬底20的侧壁32的压电体60。四个压电体60沿着四个不同的边缘22接合在四个不同的位置。
附图14示出根据本发明实施例边缘波换能器98,其包括接合在衬底20的侧壁32中的光栅50之上的压电体60。如附图13和14所示,压电体60接合在光栅50中的凹槽52上,具有重叠凹槽52电学上有效的上区域73。粘合剂可用于将压电体60接合在光栅50之上以便粘合剂填充或部分填充凹槽52。可以选择粘合剂的机械性能以便压电体60的运动大量地在凹槽52区域中从衬底20的侧壁32中去耦。替代地,光栅50可以设计成能提供压电体60和凹槽52之间强的声耦合。在某些应用中,合乎需要的是选择凹槽52中的粘合剂以减缓在凹槽52的底部从压电体60行进到衬底20的压电体波的速度以便耦合到凹槽52内边缘波的压电振荡相对于凹槽52之间耦合相移大约180°。用这样的方式,相干地添加到凹槽52内的压电振荡的耦合以在凹槽52之间耦合以产生边缘波。
替代地,光栅(未示出)可以形成在压电体60的一侧而不是在衬底20的侧壁32上以便不需要在衬底20中制造光栅50。压电体60的光栅侧能因此接合到衬底20以提供通过压电体60和边缘波产生的声波之间的耦合机件。此外,由于边缘波是在两个成形边缘的表面之间对称,例如由接触表面24和侧壁32的交点构成的边缘22,边缘波换能器98可以代之以装配到衬底20的接触表面24。替代地,边缘波换能器98可以形成在侧壁32和接触表面24两个上。
附图15示出根据本发明实施例包括切变模式压电元件(切 变模式压电体)120的边缘波换能器设计100。切变模式压电体120包括具有前侧138、背侧184和第一、第二、第三和第四侧188-194的压电材料118。第一电极122呈现在压电材料118前侧138的三角型区域136上。第二电极124呈现在压电材料118前侧138上底部三角形区域196上并且卷绕底部148到压电材料118的背侧184。
切变模式压电体120接合到衬底20的侧壁32并且邻接接触表面24。切变模式压电体120在对应于区域136的上左手角落是电学上有效的并且产生运动,其极化或极化分量如双箭头127所示相对于X和Y轴大约45°角度。切变模式压电体120的切变运动耦合到在如箭头126所示Z方向中传播的边缘波。注意切变模式压电体120直接激发边缘波;不需要例如项目50的光栅构造。
附图16示出根据本发明实施例备选方案压电体200。前端电极204呈现在在压电元件202前侧208上区域206上。后电极210呈现在在压电元件202前侧208上的较低区域212上并且从底部214卷绕到压电元件202的背侧216。后电极210沿着背侧216延伸以覆盖仅有效区218中的压电元件202的上部区域206。
通过焊接、引线接合、或其它互连方法将第一电连接220与前电极204互连。第二电连接与后电极210相互连接。压电体200的尺寸大于有效区218以便于制造允许将第一和第二电连接220和222连接到前和后电极204和210的空间(room),限制有效区域218的尺寸和形状以防止散射太多的能量。相反的极性施加到前和后电极204和210。有效区域218的尺寸仅仅举例来说是边缘波波长平方的十分之一,即≈0.1λE 2。由于波长和工作频率成反比,如果压电体200设计成用于高工作频率那么有效区域218倾向于减小。附图16示出有效区域218形状是正方形的实例。对于有效区域218其它形状是可能的,其具有电极204和210合适的形状以产生想要的重叠的几何结构。
附图15和16中的压电体限制衬底20的激发为对应于传播边缘波的横截面积的小的区域。在这些压电体中,压电激发被限制在想要的边缘波横截面积。备用的方法是压电激发大的压电体区域,例如创建大的有效区域218,但是限制压电体200和衬底20之间的机械耦合到传播边缘波的小的断面面积。
附图17示出根据本发明实施例的具有在压电元件246相对 侧上的前和后(front and back)电极226和228的压电体224。前电极226和后电极228大体上分别覆盖压电元件246的前侧254和背面256。如附图15和16的压电体,压电体224被成极连接(poled)以产生具有在45°方向中的切变运动的切变模式压电体。当这种压电体224接合到衬底20的一个角时,例如环氧树脂的刚性粘合剂可以用于想要的有效区域以完成到衬底20的强的机械耦合而空隙或例如硅橡胶(RTV)的弱切变耦合材料可以使用在其它地方。如果合乎需要的是电连接到同样的表面上的前和后电极226和228、那么可以使用附图18所示的绕回电极。
附图18示出根据本发明实施例类似于附图17所示的备选方案压电体230。前电极232呈现在压电元件236的前侧234上。后电极238呈现在压电元件236前侧234上一个角区域240上并且卷绕侧242的一部分到压电元件236的背侧244。后电极238沿着背侧244延伸以覆盖压电元件236,在前电极232和后电极238重叠处形成有效区域。在备选方案压电体230中,几乎压电体230的全部区域是压电有效的。压电体230和衬底20之间接合的合适设计和制造将到衬底20的声耦合限制到用于边缘波产生和接收的想要的区域。
附图19示出根据本发明实施例装配到衬底20的侧壁32的楔换能器组件130。压电元件250装配到楔252的一侧。楔252相对侧装配到衬底20的侧壁32。压电体元件250相对于侧壁32垂直面的倾斜定义了楔252的角度248。控制这个楔角248以便由压电体250激发并在楔252中传播的体气压波可以耦合到在衬底20的侧壁32上垂直地传播的瑞利波。
当压电元件250被激发时,它在楔252中发出体波。表面声音瑞利波(SAW)被发出并且沿着如箭头132所示的侧壁32传播;因此在附图19中垂直于边缘22传播。瑞利波又与包括光栅元件52的光栅50相互作用。如上所述,光栅元件52具有在Y轴方向近似等于或小于边缘波λE波长的高度54并且以近似λE定距离间隔。光栅元件52的宽度56大约是λE/2。光栅50可以将二维平面波(瑞利波)耦合到一维边缘波,从而发出沿着边缘22如箭头134所示的边缘波。
附图19的换能器设计可以产生楔换能器组件130的发射/接收对之间的寄生SAW路径。例如,由楔换能器组件130发出的第一 SAW的寄生分量(parasitic components)可以向侧壁32上、横过传感器表面24,以及在相对侧壁32向下传播到位于相对侧壁32上的接收楔换能器。这种寄生路径可以由将楔换能器组件130相对于边缘22倾斜来中断。
附图20示出根据本发明实施例倾斜于边缘22的楔换能器组件130。因此,由楔换能器组件130发出的瑞利波和边缘22之间的交叉角不同于90°。用于在以角度φ发出的SAW之间耦合的光栅50的凹槽52之间的间隔s由以下关系式给出:
1=s/λE+s*sin(φ)/λR。
附图21示出根据本发明实施例装配到衬底20的楔换能器组件130。可以移除相对接触表面24的相对表面28的衬底20的一部分以在由两个侧壁32构成的最接近相交平面的角落处形成倾斜的凹口140。包括楔142和压电元件144的楔换能器组件130可安装在凹口140内。因此,楔换能器组件130不突出侧壁32或衬底表面24和26的平面。
附图22示出根据本发明实施例备选方案压电体260。压电体260包括具有凹口角264的压电元件262。凹口角264可以形成具有相对于由压电元件262的第一和第二边缘268和270构成的平面的大约45°的角度266。
仅仅举例来说,对于5.5MHz操作,压电元件262沿着Z轴深度272可以大约是200微米(microns)。一般地说,选择深度272以便在工作频率处存在切变模式谐振,那就是说,深度272近似等于压电元件262材料中的体切变波波长的二分之一。分别沿着X轴和Y轴压电元件262的宽度274和高度276每个可以是2mm。第一和第二电极278和280分别可以形成在第一和第二侧268和270上。成极沿着Z轴完成。
附图23示出根据本发明实施例装配到衬底20的压电体260。装配类似于用于切变模式压电体120的附图15所示的。压电体260可以装配到具有凹口角264的衬底20,其与附图23所示的边缘22齐平的装配。替代地压电体侧268和270可以与衬底20的表面齐平。
通过装配压电体260以便压电体侧268和270形成超出接触表面24和侧壁32的突出(overhang),可以获得更大的效率。突出的数量或压电体侧268和270延伸超出接触表面24和侧壁32的距离可以等于或小于边缘波波长。突出设计可以同样地施加到基于附图15、16和18的压电体设计的换能器,以及附图14的换能器设计。
返回到附图22,如前所述电线282和284可以附着于第一和第二电极278和280。当通过交变电信号286激发,在如箭头288-294所示压电元件262内产生运动或切变模式振荡。振动的强度在接近于凹口角264的压电元件262内是强烈的,如箭头288所示。移动远离凹口角264,切变波的振动强度和振幅以受控制的方式减少。
基本边缘波激发机制分别与附图15和23中的切变模式压电体120和压电体260相同。附图22和23的压电体260的优点是,通过凹口264几何结构的合适的设计和在衬底20上放置压电体260,压电激发模式可以紧紧与边缘波运动的截面轮廊(profile)相配。这最大化了到想要的边缘波型的耦合相对于到其它模式的寄生耦合的压电体的比率。
因为横过截面的边缘波非常小,诸如压电体260的压电体非常小并与用于产生SAW的常规换能器的50Ω的阻抗相比具有高阻抗。由于阻抗与有效区域的尺寸成反比,所以阻抗现在是kΩ区域。因此,应该理解的是控制器(例如附图24中的控制器112)优选设计成能匹配压电体的高阻抗。可以使用公知的电子原理,例如将接收机电路的输入阻抗匹配到接收换能器的阻抗。
附图24示出根据本发明实施例形成的边缘波接触式传感器系统300。接触式传感器系统300包括具有接触表面24和侧壁32(未示出)的衬底20。为了清楚,边缘22示出为边缘306、308、310和312。
控制器112经过电连接110向传播换能器302和304提供电信号以激发传播换能器302和304的压电体。光栅92和94将压电体振动转换为第一声模,例如分别沿着边缘306传播的边缘波314和沿着边缘308传播的边缘波316,如箭头所示。边缘波314由反射阵列318转换为瑞利波320。瑞利波320作为约束到表面24的表面声波传播直到它遇到反射阵列322,其中它转变回边缘波324并且在箭头表 示的方向沿着边缘310传播,在那里它由接收换能器326检测。同样,边缘波316由反射阵列328转换为瑞利波330。瑞利波330作为约束到表面24的表面声波传播直到它遇到反射阵列332,其中它转变回边缘波334并且在箭头表示的方向沿着边缘312传播,在那里边缘波的信号振幅可以由接收换能器336检测。产生电连接114以便接收换能器326和336可以回过头来向控制器112提供电信号。对接触表面24的扰动(例如用手指或触针的接触)能因此检测为来自接收边缘上的边缘波信号中的扰动,并且可以基于在接收信号中检测出扰动的时间来确定与扰动有关的位置。电连接110和114可以包括电缆线束。
由于反射阵列318、322、328和332以及换能器302、304、326和336可以沿着和/或连接到传感器衬底20很窄的外部外围116形成,并且多数情况下可以产生在和/或连接到衬底20侧壁32,所以接触灵敏区108形成在接触表面24上并且基本上包括整个接触表面24。产生并且检测一维边缘波需要的接触表面24的外部外围116可以仅仅是1mm。
替代地,表面声波(例如二维SAW)可以在横越接触灵敏区108的至少一部分而不转化为边缘波以后被直接检测,以识别接触表面24的触摸灵敏区108的扰动的存在和位置。
附图24可以修改为如上所述使用两个发射/接收换能器提供二维接触位置坐标。此外,使用边缘波的很多其它触摸屏几何结构是可能的,包括具有可以用于边缘波的非正交的声路径的触摸屏设计。
附图25示出根据本发明实施例的接触面板350。整齐的边缘356-362形成在所述衬底20上。反射元件364和366在最接近两个边缘356和362形成侧壁32或接触表面24上。反射元件364示出为最接近边缘356形成在侧壁32上而反射元件366示出为最接近边缘362形成在接触表面24上。压电体352和354用于既发射又接收边缘波信息。
仅仅一个压电体352或354可以同时有效地发射或接收。控制器368可以经过电连接370和372和压电体352和354中的每一个通信。控制器368可以具有开关374和376以控制哪一个压电体352或354连接到用于发射信号的信号发生器378或用于接收和译码信号 的电子模块380。控制器368可以在压电体352和354中交替,其中压电体352可以发射与接收信号继之以压电体354发射与接收信号。替换的,电连接370和372每个可以提供有每个具有发射/接收模式开关两个相同电路中的一个。
当压电体352激活时,它沿箭头382的方向发射边缘波。边缘波遇到反射元件364并且转换为耦合到接触表面24表面并且沿箭头384方向传输的SAW。在方向384传播的SAW的显著部分将由边缘360反射。替代地,一或多个反射条386可以安置最接近并平行于边缘360在接触表面24上隔开二分之一波长处。边缘360和/或反射条386沿箭头388方向反射SAW 180°。当SAW遇到边缘356和反射元件364,SAW转换为沿箭头390方向传输的边缘波。边缘波由压电体352检测而电信号由控制器368经过电连接370读取。
控制器368然后传输来自电连接372上的信号发生器378的电信号以激发压电体354。压电体354产生沿着箭头392的方向沿着边缘362传播边缘波。当边缘波遇到反射元件366时,边缘波转换为沿着箭头394的方向横过接触表面24传播的SAW。SAW由边缘358和/或一或多个反射条396反射180°。反射的SAW沿着箭头398的方向行进,遇到边缘362和反射元件366,并且转换为沿着箭头400的方向行进的边缘波。压电体354检测边缘波并且向控制器368发送电连接372上的电信号。
附图31示出根据本发明实施例形成的备选方案边缘波接触式传感器系统。单个换能器602运行在发射与接收模式以利用接触表面24很窄的边界区域的同时提供二维接触坐标信息。换能器602可以是能够发射和接收边缘波的任何换能器设计,例如先前讨论的换能器设计。
衬底20形成为具有整齐边缘604-610。圆角612形成在边缘604和606相交的位置。圆角612同时形成具有大体上整齐的边缘,并且具有大约90°的角度。反射器阵列614和616分别形成在边缘604和606上。吸收阻尼器618形成在最接近边缘608和最接近反射阵列616一端的侧壁32中的一端上。应该注意的是边缘的波导属性允许一个很简单和有效的方法在用于获取X和Y接触数据的反射器阵列614和616之间边缘波重定向90°,即,侧壁32可以形成具有侧壁32的简 单的四等分圆周形状并且对应的边缘604和606。
换能器602沿着边缘604沿着箭头620的方向传输边缘波。传输的边缘波一部分由反射器阵列614散射并且作为瑞利波沿着箭头622的方向横越接触表面24。波沿着箭头624的方向反射180°并且再次由反射器阵列614沿着箭头626的方向反射以由换能器602接收。传输的边缘波的这部分在时间上相对早地被接收并且提供接触X坐标的一个测量。
来自换能器的传输的边缘波的另一部分透射通过反射器阵列614,随后圆角612并且遇到反射器阵列616。边缘波能量作为瑞利波沿着箭头628的方向以90°部分散射并且作为瑞利波横越接触表面24。波沿着箭头630的方向由边缘610反射180°并且由反射器阵列616反射以及由换能器602接收。传输的边缘波的这部分在时间上相对晚一点被接收并且提供接触的Y坐标的测量。通过反射器阵列614和616传输的边缘波的任何剩余部分可以利用吸收阻尼器618消除。
附图26示出根据本发明实施例接触面板402。接触面板402包括如上所述的具有侧壁32的衬底20。整齐的边缘404-410形成在每一侧壁32的平面和接触表面24之间的交点处。衬底20形成为具有接触表面24的一维大于另一维。例如,沿着X维度的衬底20长于Y方向的。
行进在接触式传感器或接触式传感器系统中的较长的声路径的声波将会经历比行进较短声路径长度中更多的损失。因此,为产生接触式传感器接触灵敏区整个相对统一的接触灵敏度,通常希望实施由行进不同的声路径长度的声波产生的信号的均衡以便信号电平大致和声音路径长度无关。
反射元件420、422和424分别最接近边缘406、410和404形成。如上所述,反射元件420-424可以形成为在侧壁32和/或接触表面24上有规则间隔的凹槽或凸出部。任选的,一或多个反射条426可以最接近边缘408形成在接触表面24上。
接触板402使用三个压电体412,414和416。压电体412可以用来发射信号而压电体414用于接收信号。控制器418内的信号发生器428在电连接430上传输信号。发射压电体412发出沿着边缘406沿着箭头432的方向的边缘波。边缘波由反射元件420部分反射 并且转换为横过接触表面24沿着箭头434的方向移动的SAW。SAW由反射元件422转换为边缘波并且沿着边缘410沿着箭头436的方向行进。压电体414检测边缘波并且经过电连接438向控制器418发送电信号。
压电体416用于发射和接收信号。这可以如上所述结合附图25和控制器368来完成。压电体416由来自控制器418的信号发生器428的电信号经过电连接440激发。压电体416沿着边缘404沿着箭头442的方向发出边缘波,其由反射元件424沿着箭头444的方向部分反射作为SAW。SAW由反射条426和/或边缘408沿着箭头446的方向反射180°。SAW由反射元件424反射并且转换为沿着箭头448的方向传播的边缘波。边缘波由压电体416检测而电信号在电连接440上发送到控制器418。
接触面板402使用一个具有反射元件424和边缘408(并且任选反射器条426)的压电体416以检测沿着X轴上的接触事件。为检测沿着Y轴的接触事件,使用两个压电体412和414以及反射元件420和422。因此,SAW沿着X轴仅仅横越接触表面24一次,而SAW沿着Y轴横越接触表面24两次。
附图27示出根据本发明实施例包括四个压电体452-458的大型接触面板450。接触面板450可以包括衬底20上的大的接触表面24。因此,波必须行进的距离变得增长并且信号经历增加的衰减。对于给定的接触面板尺寸,附图27中的设计最小化了最长的路径长度而在每个角具有单个换能器。注意附图15-18和23中设计的至多一个换能器位于衬底20的每个角。
压电体452-458安装在衬底20不同的角并且从而不互相物理干涉。压电体452-458中的每一个如附图25所述都发射与接收信号,因此不再讨论控制器418。
衬底20形成具有整齐的边缘460-466。反射元件470-476沿着最靠近压电体452-458的每一边缘460-466的大致二分之一的长度最接近边缘460-466中的每一个形成。如果存在的话,反射条494-498可以形成在平行于边缘466的接触表面20上并且以大约二分之一表面声音波长的距离间隔。反射条494-498沿着不存在反射元件476边缘466长度的大约二分之一形成,或边缘466最远离压电体456 的一半。其他的反射条以同样方式平行于每一边缘460-464形成在接触表面20上。
当压电体452被激发,压电体452发出沿着边缘462沿着箭头478的方向的边缘波。边缘波由反射元件472部分反射并且转换为横过接触表面24沿着箭头480的方向行进的SAW。SAW由反射条494-498和/或边缘466沿着箭头482的方向反射180°。SAW由反射元件472沿着箭头484的方向反射90°并且由压电体452接收。因此,压电体452检测表示接触表面24一半的Y坐标的信号,例如区域486。
压电体454、456和458每个以用于压电体152的方式发送和接收信号,检测大约接触表面24的二分之一的区域上的信号。压电体454检测表示区域488的X坐标的信号。压电体456检测表示区域的Y坐标的信号。压电体458检测表示区域492的X坐标的信号。因此,与使用两个压电体来发送与接收信号的接触面板相比,接触面板450使用四个压电体452-458,其接收来自在与两个压电体几何结构相比长度减少的信号路径的信号。边缘波不必行进到远处并且可以实现更大的接触面板450。此外,由于每一个压电体452-458被安装在衬底20不同的角上,压电体452-458之间没有物理干涉。
附图32示出根据本发明实施例其中单个发射换能器642产生X和Y信号的接触式传感器640。如前所述衬底20形成具有整齐的边缘646-652。发射换能器642被安装在衬底20的第二表面28上并且沿着垂直边缘644向上箭头654的方向发射边缘波,所述垂直边缘644形成两个侧壁32的交点。在由垂直边缘644和两个边缘646和648形成的顶点656,垂直入射传播的边缘波分成沿着箭头658和660的方向行进的两个水平传播的边缘波。
沿着箭头方向658的方向行进的水平传播的边缘波遇到部分散射边缘波90°的传输反射器阵列662(X方向)并且转换为透过接触表面24沿着箭头666的方向的瑞利波。瑞利波随后由X接收反射器阵列668接收,转换为沿着箭头672的方向引导并且由换能器674接收的边缘波。
同样地,沿着箭头方向660的方向行进的水平传播的边缘波遇到传输反射器阵列664,部分散射90°并且转换为透过接触表面24沿着箭头676的方向的瑞利波。瑞利波被由Y接收反射器阵列670接 收,转换为沿着箭头678的方向引导并且由换能器680接收的边缘波。因此,X和Y信号共享公用的脉冲串(burst)(来自换能器642),但是具有来自不同接收换能器(674和680)的不同的接收信号。替代地,声路径可以是反向的以便不同的X和Y发射换能器可以顺序地激发由公用的接收器换能器接收的声路径。
附图33示出根据本发明实施例其中单个发射换能器692产生X和Y信号的备选方案接触式传感器690。在附图33中,发射换能器692和接收换能器694和696可以形成和/或附着于衬底20的第二表面28,允许当设计使用接触式传感器690的系统时增加的灵活性。四分之一圆曲管698和700引导起初水平的边缘波到垂直方向,其由固定在衬底20的底面上的换能器694和696接收所需要。
附图34示出根据本发明实施例常用的发射换能器692附近的衬底20的几何结构。换能器692沿着垂直边缘702向上在箭头符号704的方向发射边缘波。垂直边缘702形成两个弯曲边缘706和708,并且边缘波拆分形成两个沿着箭头710和712的方向传播的边缘波。替代地,几何结构可以与附图32示出的相同。实验和模拟研究可以用来确定衬底角的几何结构,其最大有效地拆分在X和Y信号路径之间传输的声能。如附图32,发送与接收换能器的角色可以在附图33和34的实施例中互换。
附图28示出根据本发明实施例与计算机502相互连接的接触监视器500的方框图。计算机502运行一或多个应用,例如工厂、零售店、饭店、医疗机构等等。计算机502可以用于工厂设置中的校准和测试,例如并且可以包括显示器504和用户输入506,例如键盘和/或鼠标。多个接触监视器500可以通过网络与计算机502相互连接。
监视器508包括用于在显示器510上显示数据的部件。显示器510可以是LCD、CRT、等离子体、摄影图象等等。触摸屏512安装在显示器510附近。触摸屏512经过指状物接触、触针等等接收来自用户的输入。触摸屏512可以由衬底20形成并且具有很窄的边界536。边界536可以是如上所述边缘波的宽度。
监视器电缆514利用监视器控制器516连接监视器508。监视器控制器516通过视频电缆518接收来自计算机502的视频信息。视频信息由监视器控制器516接收并且处理,然后通过监视器电 缆514传输到监视器508用于显示在显示器510上。应该理解的是监视器508和监视器控制器516可以是硬布线的或互连的以便不需要监视器电缆514。监视器控制器516包括例如CPU 520和存储器522的部件。
触摸屏电缆524将触摸屏512和触摸屏控制器526互连。触摸屏控制器526通过接触数据电缆528向计算机502发送信息和从计算机502接收信息。接触信息由触摸屏512接收,通过触摸屏电缆524传递到触摸屏控制器526,然后通过接触数据传输电缆528发送到计算机502。触摸屏控制器526包括例如CPU 530和存储器532的部件。
监视器外壳534可以包装监视器508、监视器和触摸屏电缆514和524以及监视器和触摸屏控制器516和526。监视器外壳534可以包装触摸屏512的边界536,使得触摸屏512安全并且防止和边缘波、反射器、换能器、压电体等等的外来扰动。例如,将例如触摸屏512的声音接触式传感器集成并且密封到例如监视器外壳534的其他设备是合乎需要的。这种密封可以防止水或其它污染物进入到换能器以及边缘波传播边缘,以及包括接触式传感器的接触显示系统的内部构件。当包括用于产生和接收声波的换能器和用于引导声波的反射阵列的边界536是窄的时候,与具有宽的边界的现有监视器相比减小了必须密封的总区域。由于使用边缘波使产生的很窄的边界536成为可能,这种密封可以简化,例如使用可以印刷或微分配到具有受控制的注册和窄的密封宽度的衬底20上的密封材料。可以使用热处理并且接合到衬底20上的密封材料。
仅仅举例来说,监视器外壳534可以是用于独立的监视器。任选的,如果接触监视器500安装在配电亭或其它外壳内,监视器外壳534可以是省去的。视频和接触数据电缆518和528可以是单独的电缆或封装一起的包装。视频和接触数据电缆518和528从监视器外壳534延伸到计算机502的位置。
[01501存储器522和532储存包括扩展显示标识数据(EDID)的数据。EDID数据可以包括关于监视器508和触摸屏512的信息,例如出售商或制造商标识号、最大图像尺寸、彩色特性、预置定时和频率范围限制。任选的,存储器522和532可以是组合的并且拥有监视器 和触摸屏控制器516和526中的一个,以形成单个常用存储器模块,其存储用于监视器508和触摸屏512的EDID。任选的,触摸屏和监视器控制器516和526可以合并形成用于接触监视器500的单个常用的控制器。
应该理解的是接触监视器500实施例仅仅是声音接触式传感器很多可能的实施例中的一个。例如,例如铝的金属可以用来形成衬底来创建接收接触输入的桌。边缘波在弯曲边缘上行进,从而可以沿着圆形对象的边缘传播,例如圆形桌面或圆柱。附图29示出根据本发明实施例圆形桌面顶端550的实例。圆桌顶端550可以由在它的周围具有整齐的边缘552的玻璃构成,在边缘552外围按照需要制造的正方形接触区域554和反射阵列556-562和换能器564-570支持示出的声音路径。附图35示出根据本发明实施例备选方案几何选项。实心或空心圆柱720具有圆形几何结构整齐的90°边缘722,在其上制造发射/接收换能器728、反射阵列726,以及任选的边缘波束流收集器或阻尼器730。来自换能器728的边缘波向下散射90°并且模式变换为沿着箭头732的方向向下传播的瑞利波。在圆柱720的底部边缘波沿着箭头734的方向反射180°并且声音路径将其路径返回到换能器728。提供阻尼器740来吸收由反射阵列726散射到顶端水平表面724上的任何边缘波能量。这种传感器提供圆柱720轴周围接触事件的角坐标。(引用至此的美国专利5,854,450的阵列设计原理此外可以适用于用于允许通用接触式传感器几何结构的边缘波接触式传感器。)此外可以实施用于博物馆展出的跟踪板及其它普通大众应用,其中衬底20具有圆乃至半球面几何结构的强不锈钢设计。因此,声音接触式传感器的几何结构不局限于正方形或长方形平面,而是可以用来形成很多不同的产品,例如用于碰撞检测的接触敏感机器人表面。此外,由于使用各种各样的换能器和反射器组合可以检测大尺寸区域,因此实施方式的尺寸没有受到限制。
按前所述,在接触式传感器或接触式传感器系统中的较长的声路径行进的声波将会经历比行进短声路径长度损失更多。因此,为产生整个接触式传感器接触灵敏区相对统一的接触灵敏度,通常希望实施由行进不同的声路径长度的声波产生的信号的均衡以便信号电平大致和声路径长度无关。信号均衡可以例如通过以下完成,改变沿 着声路径反射元件的密度;沿着反射阵列的反射元件高度或深度;反射元件长度;阵列内反射元件长度和反射阵列和声束之间距离。此外,用于发射和/或接收的换能器的数目,和每个换能器发送和/或接收信号触摸屏的区域可以调节以表示接触对象的尺寸和/或形状。
应该理解的是上述设备和方法的配置仅仅是示例性,而且不脱离权利要求的精神和范围可以作出其它实施例和修改。
Claims (19)
1.一种接触式传感器包括:能够传播声波的衬底,衬底包括具有接触灵敏区的第一表面并包括沿着第一边缘和第一表面相交的第一侧壁,第一边缘配置为沿着第一边缘传播第一声波,第一表面配置为横过接触灵敏区传播第二声波,第二声波基于第一声波;和
用于将第一声波转换为第二声波的波转换器。
2.权利要求1的接触式传感器,其中第一侧壁和第一表面在第一边缘以90°的角度相交。
3.权利要求1的接触式传感器,进一步包括最接近第一边缘提供的换能器,该换能器产生沿着第一边缘传播的第一声波,该换能器接收横过接触灵敏区传播的第二声波。
4.权利要求1的接触式传感器,其中第二声波是切变波、拉姆波和瑞利波中的一个。
5.权利要求1的接触式传感器,其中波转换器包括最接近第一边缘定位的部分反射元件的第一阵列,用于将沿着第一边缘传播的第一声波转换为在衬底上传播的第二声波。
6.权利要求1的接触式传感器,波转换器包括以第一声波的一个波长间隔的部分反射元件。
7.权利要求1的接触式传感器,其中波转换器包括具有规则间隔的凹槽的反射元件。
8.权利要求1的接触式传感器,进一步包括最接近第一边缘提供的换能器,该换能器产生沿着第一边缘传播的第一声波。
9.权利要求1的接触式传感器,进一步包括衍射光栅,其包括最接近第一边缘的一系列规则间隔的凹槽,凹槽沿着第一表面从第一边缘延伸小于第一声波波长的距离。
10.权利要求1的接触式传感器,进一步包括最接近第一边缘的换能器,该换能器包括在衬底表面上垂直于第一声波传播方向提供的切变模式压电体。
11.一种接触式传感器系统包括:
用于产生一维第一声波的发射器;
接触式传感器,包括能够传播声波的衬底,该衬底包括具有接触灵敏区的第一表面并包括沿着第一和第二边缘和第一表面相交的第一侧壁和第二侧壁,第一边缘配置为传播第一声波,第一表面配置为横过接触灵敏区传播第二声波;
在衬底上提供的第一转换器,用于将第一声波转换为在衬底上横过接触灵敏区传播的第二声波;以及
在衬底上提供的检测器,用于在第二声波横越接触灵敏区的至少一部分之后检测第二声波。
12.权利要求11的接触式传感器系统,其中发射器以及检测器中的至少一个包括压电元件。
13.权利要求11的接触式传感器系统,其中第一转换器包括最接近第一边缘定位的反射元件的阵列。
14.权利要求11的接触式传感器系统,进一步包括驱动发射器以产生第一声波并且从检测器接收信号的控制器。
15.权利要求11的接触式传感器系统,进一步包括用于将第二声波转换为通过检测器检测的一维第三声波的第二波转换器。
16.权利要求11的接触式传感器系统,其中衬底是透明的以便接触式传感器可以起触摸屏的作用。
17.一种用于检测能够传播声波的衬底的接触灵敏区上的接触的方法,衬底包括具有接触灵敏区的第一表面,衬底具有沿着第一和第二边缘和第一表面相交的第一和第二侧壁,所述方法包括:
沿着第一边缘发射一维第一声波;
将第一声波转换为第二声波;
引导第二声波沿着第一表面通过接触灵敏区;并且
检测最接近所述衬底第二侧壁的第二声波。
18.权利要求17的方法,其中检测步骤包括检测第二声波中的扰动,该扰动表示接触事件的位置。
19.权利要求17的方法,其中检测步骤进一步包括将第二声波转换为一维第三声波并且检测最接近第一和第二边缘中的一个的第三声波。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US56246104P | 2004-04-14 | 2004-04-14 | |
| US60/562,461 | 2004-04-14 | ||
| PCT/US2005/012896 WO2005103873A2 (en) | 2004-04-14 | 2005-04-13 | Acoustic touch sensor |
Related Child Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201110083418XA Division CN102135843B (zh) | 2004-04-14 | 2005-04-13 | 接触式传感器、接触式传感器系统和检测接触的方法 |
| CN2011100835430A Division CN102129334A (zh) | 2004-04-14 | 2005-04-13 | 接触式传感器、接触式传感器系统和检测接触的方法 |
| CN201110083545XA Division CN102103443B (zh) | 2004-04-14 | 2005-04-13 | 接触式传感器、接触式传感器系统和检测接触的方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1942852A CN1942852A (zh) | 2007-04-04 |
| CN1942852B true CN1942852B (zh) | 2011-06-08 |
Family
ID=34966177
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2011100835430A Pending CN102129334A (zh) | 2004-04-14 | 2005-04-13 | 接触式传感器、接触式传感器系统和检测接触的方法 |
| CN2005800113884A Expired - Fee Related CN1942852B (zh) | 2004-04-14 | 2005-04-13 | 接触式传感器、接触式传感器系统和检测接触的方法 |
| CN201110083418XA Expired - Fee Related CN102135843B (zh) | 2004-04-14 | 2005-04-13 | 接触式传感器、接触式传感器系统和检测接触的方法 |
| CN201110083545XA Expired - Fee Related CN102103443B (zh) | 2004-04-14 | 2005-04-13 | 接触式传感器、接触式传感器系统和检测接触的方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2011100835430A Pending CN102129334A (zh) | 2004-04-14 | 2005-04-13 | 接触式传感器、接触式传感器系统和检测接触的方法 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201110083418XA Expired - Fee Related CN102135843B (zh) | 2004-04-14 | 2005-04-13 | 接触式传感器、接触式传感器系统和检测接触的方法 |
| CN201110083545XA Expired - Fee Related CN102103443B (zh) | 2004-04-14 | 2005-04-13 | 接触式传感器、接触式传感器系统和检测接触的方法 |
Country Status (11)
| Country | Link |
|---|---|
| EP (4) | EP1741020B1 (zh) |
| JP (3) | JP5037334B2 (zh) |
| KR (3) | KR101163254B1 (zh) |
| CN (4) | CN102129334A (zh) |
| AU (1) | AU2005236441A1 (zh) |
| BR (1) | BRPI0509882A (zh) |
| CA (1) | CA2563357A1 (zh) |
| IL (1) | IL178566A0 (zh) |
| MX (1) | MXPA06011911A (zh) |
| TW (3) | TW201243295A (zh) |
| WO (1) | WO2005103873A2 (zh) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8243048B2 (en) * | 2007-04-25 | 2012-08-14 | Elo Touch Solutions, Inc. | Touchscreen for detecting multiple touches |
| EP2017703A1 (en) * | 2007-07-09 | 2009-01-21 | Sensitive Object | Touch control system and method for localising an excitation |
| US8880206B2 (en) * | 2010-03-11 | 2014-11-04 | Sony Corporation | Touch-sensitive sensor |
| US8576202B2 (en) | 2010-03-25 | 2013-11-05 | Elo Touch Solutions, Inc. | Bezel-less acoustic touch apparatus |
| US8018229B1 (en) * | 2010-04-22 | 2011-09-13 | Honeywell International Inc. | Structure and method for flex circuit on a chip |
| KR101322104B1 (ko) | 2011-09-08 | 2013-10-28 | 주식회사 모바수 | 착탈 가능한 엔드 이펙터를 갖는 최소 침습 수술 기구 |
| WO2013074686A1 (en) * | 2011-11-14 | 2013-05-23 | Street Smart Sensors Llc | Acoustic array sensor |
| KR101365357B1 (ko) | 2012-04-02 | 2014-02-20 | 주식회사 모바수 | 관절 고정 구조를 갖는 최소 침습 수술 기구 |
| US9285261B2 (en) | 2012-09-12 | 2016-03-15 | Street Smart Sensors Llc | Acoustic flexural order level sensor |
| KR101628470B1 (ko) | 2014-08-14 | 2016-06-08 | 현대자동차주식회사 | 리드믹 음파 생성 패드 |
| CN104216576B (zh) * | 2014-08-27 | 2018-05-11 | 合肥鑫晟光电科技有限公司 | 一种表面声波触摸屏及触摸显示装置 |
| KR101614844B1 (ko) | 2015-04-21 | 2016-04-29 | 경북대학교 산학협력단 | 사물 터치 감지 시스템 및 사물 터치 감지 방법 |
| EP3287880B1 (en) | 2015-04-21 | 2019-05-22 | Fujitsu Limited | Electronic device |
| JP6913387B2 (ja) * | 2016-03-31 | 2021-08-04 | 株式会社未来機械 | 作業ロボットおよびエッジ検出器 |
| US20170364158A1 (en) * | 2016-06-20 | 2017-12-21 | Apple Inc. | Localized and/or Encapsulated Haptic Actuators and Elements |
| BR112018077435A8 (pt) | 2016-07-07 | 2023-03-14 | Univ California | Implantes utilizando retroespalhamento ultrassônico para detecção de condições fisiológicas |
| US11402950B2 (en) | 2016-07-29 | 2022-08-02 | Apple Inc. | Methodology and application of acoustic touch detection |
| FR3061567B1 (fr) * | 2017-01-03 | 2019-05-31 | Hap2U | Interface tactile comportant un capteur de force |
| TWI634527B (zh) * | 2017-05-23 | 2018-09-01 | 財團法人工業技術研究院 | 感測系統 |
| KR102326770B1 (ko) | 2017-08-03 | 2021-11-17 | 삼성전자 주식회사 | 디스플레이장치 및 그 제어방법 |
| CN110497425A (zh) * | 2018-05-17 | 2019-11-26 | 张家港市光武智能科技有限公司 | 一种基于兰姆波与瑞利波的机器人皮肤 |
| CN110977189B (zh) * | 2019-11-18 | 2021-07-13 | 济南邦德激光股份有限公司 | 一种激光切割系统及其切割方法 |
| US20230089015A1 (en) * | 2020-02-19 | 2023-03-23 | The Regents Of The University Of California | Anchor loss in millimeter-scale ultrasonic wireless implantable devices |
| JP7035102B2 (ja) * | 2020-02-25 | 2022-03-14 | Nissha株式会社 | せん断力を検出可能な情報入力装置 |
| CN114260927A (zh) * | 2021-12-16 | 2022-04-01 | 北京工业大学 | 一种基于超声兰姆波的机器人感知皮肤 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5177327A (en) * | 1990-11-16 | 1993-01-05 | Exzec, Inc. | Acoustic touch position sensor using shear wave propagation |
| CN1481544A (zh) * | 2000-10-20 | 2004-03-10 | ���ܿ���ϵͳ����˾ | 具有叠层衬底的声触摸传感器 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU7970094A (en) * | 1993-10-18 | 1995-05-08 | Carroll Touch, Inc. | Acoustic wave touch panel for use with a non-active stylus |
| US5591945A (en) * | 1995-04-19 | 1997-01-07 | Elo Touchsystems, Inc. | Acoustic touch position sensor using higher order horizontally polarized shear wave propagation |
| US5648643A (en) * | 1995-06-16 | 1997-07-15 | Knowles; Terence J. | Acoustic wave touch panel with inlayed, etched arrays and method of making the panel |
| EP0985206B1 (en) * | 1996-08-12 | 2012-03-14 | Tyco Electronics Coroporation | Acoustic touch sensor |
| EP0950234B1 (en) * | 1996-12-25 | 2004-05-26 | Elo Touchsystems, Inc. | Grating transducer for acoustic touchscreen |
| US5883457A (en) | 1997-04-24 | 1999-03-16 | Raychem Corporation | Organic matrix for acoustic reflector array |
| JPH11327772A (ja) * | 1998-05-07 | 1999-11-30 | Ricoh Co Ltd | 超音波タッチパネル |
| JP4024933B2 (ja) * | 1998-08-18 | 2007-12-19 | タッチパネル・システムズ株式会社 | タッチパネル |
| JP2001014094A (ja) | 1999-06-30 | 2001-01-19 | Touch Panel Systems Kk | 音響的接触検出装置 |
| US6636201B1 (en) * | 2000-05-26 | 2003-10-21 | Elo Touchsystems, Inc. | Acoustic touchscreen having waveguided reflector arrays |
| US7106310B2 (en) * | 2001-01-18 | 2006-09-12 | Texzec, Inc. | Acoustic wave touch actuated switch |
-
2005
- 2005-04-13 AU AU2005236441A patent/AU2005236441A1/en not_active Abandoned
- 2005-04-13 TW TW101104311A patent/TW201243295A/zh unknown
- 2005-04-13 CA CA002563357A patent/CA2563357A1/en not_active Abandoned
- 2005-04-13 KR KR1020067023777A patent/KR101163254B1/ko not_active IP Right Cessation
- 2005-04-13 EP EP05736598A patent/EP1741020B1/en not_active Not-in-force
- 2005-04-13 CN CN2011100835430A patent/CN102129334A/zh active Pending
- 2005-04-13 BR BRPI0509882-3A patent/BRPI0509882A/pt not_active Application Discontinuation
- 2005-04-13 KR KR1020117013907A patent/KR101163339B1/ko not_active IP Right Cessation
- 2005-04-13 MX MXPA06011911A patent/MXPA06011911A/es active IP Right Grant
- 2005-04-13 KR KR1020117013900A patent/KR101138530B1/ko not_active IP Right Cessation
- 2005-04-13 EP EP11176433.8A patent/EP2385444B1/en not_active Ceased
- 2005-04-13 CN CN2005800113884A patent/CN1942852B/zh not_active Expired - Fee Related
- 2005-04-13 EP EP11176490A patent/EP2385446A1/en not_active Withdrawn
- 2005-04-13 TW TW101104310A patent/TW201243294A/zh unknown
- 2005-04-13 EP EP11176467A patent/EP2385445A1/en not_active Withdrawn
- 2005-04-13 CN CN201110083418XA patent/CN102135843B/zh not_active Expired - Fee Related
- 2005-04-13 JP JP2007508576A patent/JP5037334B2/ja not_active Expired - Fee Related
- 2005-04-13 TW TW094111631A patent/TWI380001B/zh not_active IP Right Cessation
- 2005-04-13 WO PCT/US2005/012896 patent/WO2005103873A2/en active Application Filing
- 2005-04-13 CN CN201110083545XA patent/CN102103443B/zh not_active Expired - Fee Related
-
2006
- 2006-10-15 IL IL178566A patent/IL178566A0/en unknown
-
2011
- 2011-09-30 JP JP2011217930A patent/JP2012038329A/ja not_active Ceased
- 2011-09-30 JP JP2011217923A patent/JP2012033186A/ja active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5177327A (en) * | 1990-11-16 | 1993-01-05 | Exzec, Inc. | Acoustic touch position sensor using shear wave propagation |
| CN1481544A (zh) * | 2000-10-20 | 2004-03-10 | ���ܿ���ϵͳ����˾ | 具有叠层衬底的声触摸传感器 |
Non-Patent Citations (2)
| Title |
|---|
| M. DE BILLY.ACOUSTIC TECHNIQUE APPLIED TO THEMEASUREMENT OF THE FREE EDGE WAVE VELOCITY.ULTRASONICS34 6.1996,34(6),611-619. |
| M. DE BILLY.ACOUSTIC TECHNIQUE APPLIED TO THEMEASUREMENT OF THE FREE EDGE WAVE VELOCITY.ULTRASONICS34 6.1996,34(6),611-619. * |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007533040A (ja) | 2007-11-15 |
| AU2005236441A1 (en) | 2005-11-03 |
| CN102103443A (zh) | 2011-06-22 |
| JP2012033186A (ja) | 2012-02-16 |
| EP1741020B1 (en) | 2011-10-05 |
| EP2385445A1 (en) | 2011-11-09 |
| CN102135843A (zh) | 2011-07-27 |
| BRPI0509882A (pt) | 2007-10-16 |
| JP5037334B2 (ja) | 2012-09-26 |
| EP2385444A1 (en) | 2011-11-09 |
| WO2005103873A2 (en) | 2005-11-03 |
| CA2563357A1 (en) | 2005-11-03 |
| CN102129334A (zh) | 2011-07-20 |
| MXPA06011911A (es) | 2007-01-25 |
| JP2012038329A (ja) | 2012-02-23 |
| TW200604497A (en) | 2006-02-01 |
| WO2005103873A3 (en) | 2006-02-02 |
| EP2385446A1 (en) | 2011-11-09 |
| KR101163339B1 (ko) | 2012-07-05 |
| KR101138530B1 (ko) | 2012-04-25 |
| KR20070011492A (ko) | 2007-01-24 |
| EP1741020A2 (en) | 2007-01-10 |
| CN1942852A (zh) | 2007-04-04 |
| CN102135843B (zh) | 2013-03-27 |
| EP2385444B1 (en) | 2018-09-26 |
| KR20110086739A (ko) | 2011-07-29 |
| CN102103443B (zh) | 2013-02-27 |
| TW201243294A (en) | 2012-11-01 |
| IL178566A0 (en) | 2007-02-11 |
| TWI380001B (en) | 2012-12-21 |
| TW201243295A (en) | 2012-11-01 |
| KR101163254B1 (ko) | 2012-07-09 |
| KR20110086738A (ko) | 2011-07-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1942852B (zh) | 接触式传感器、接触式传感器系统和检测接触的方法 | |
| US8941624B2 (en) | Acoustic touch sensor utilizing edge waves | |
| US7456825B2 (en) | Acoustic touch sensor with low-profile diffractive grating transducer assembly | |
| CN100449470C (zh) | 具有波导反射器阵列的声触摸屏 | |
| US5739479A (en) | Gentle-bevel flat acoustic wave touch sensor | |
| US6091406A (en) | Grating transducer for acoustic touchscreens | |
| JP3749608B2 (ja) | タッチ式座標入力装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| ASS | Succession or assignment of patent right |
Owner name: ELECTRONIC TOUCH CONTROL PRODUCTS SOLUTIONS COMPAN Free format text: FORMER OWNER: TEICH ELECTRONICS CO., LTD. Effective date: 20120926 |
|
| C41 | Transfer of patent application or patent right or utility model | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20120926 Address after: California, USA Patentee after: Elo Touch Solutions, Inc. Address before: California, USA Patentee before: TYCO ELECTRONICS Corp. |
|
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20110608 |