CN111342873A - 一种信道测量方法和通信装置 - Google Patents
一种信道测量方法和通信装置 Download PDFInfo
- Publication number
- CN111342873A CN111342873A CN201811550128.XA CN201811550128A CN111342873A CN 111342873 A CN111342873 A CN 111342873A CN 201811550128 A CN201811550128 A CN 201811550128A CN 111342873 A CN111342873 A CN 111342873A
- Authority
- CN
- China
- Prior art keywords
- delay
- angle
- vectors
- vector
- reference signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004891 communication Methods 0.000 title claims abstract description 106
- 238000000691 measurement method Methods 0.000 title abstract description 20
- 239000013598 vector Substances 0.000 claims abstract description 1633
- 239000011159 matrix material Substances 0.000 claims abstract description 376
- 238000000034 method Methods 0.000 claims abstract description 302
- 238000005259 measurement Methods 0.000 claims abstract description 84
- 230000005540 biological transmission Effects 0.000 claims description 89
- 238000012545 processing Methods 0.000 claims description 41
- 238000004590 computer program Methods 0.000 claims description 10
- 230000010287 polarization Effects 0.000 description 164
- 230000008569 process Effects 0.000 description 66
- 230000015654 memory Effects 0.000 description 49
- 230000011664 signaling Effects 0.000 description 43
- 230000006870 function Effects 0.000 description 23
- 238000010606 normalization Methods 0.000 description 23
- 238000004364 calculation method Methods 0.000 description 16
- 230000001934 delay Effects 0.000 description 16
- 238000013139 quantization Methods 0.000 description 16
- 238000010586 diagram Methods 0.000 description 14
- 238000004422 calculation algorithm Methods 0.000 description 13
- 238000013507 mapping Methods 0.000 description 8
- 235000019580 granularity Nutrition 0.000 description 7
- 238000003775 Density Functional Theory Methods 0.000 description 5
- 230000009471 action Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 5
- 238000013461 design Methods 0.000 description 5
- 238000005516 engineering process Methods 0.000 description 5
- 238000005562 fading Methods 0.000 description 5
- 230000021615 conjugation Effects 0.000 description 4
- 230000008878 coupling Effects 0.000 description 3
- 238000010168 coupling process Methods 0.000 description 3
- 238000005859 coupling reaction Methods 0.000 description 3
- 238000000354 decomposition reaction Methods 0.000 description 3
- 238000006467 substitution reaction Methods 0.000 description 3
- 230000017105 transposition Effects 0.000 description 3
- 230000006399 behavior Effects 0.000 description 2
- 230000009977 dual effect Effects 0.000 description 2
- 230000014509 gene expression Effects 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 230000007774 longterm Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 230000001131 transforming effect Effects 0.000 description 2
- 101150071746 Pbsn gene Proteins 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000003190 augmentative effect Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 238000007635 classification algorithm Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
Images







Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/02—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas
- H04B7/04—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas
- H04B7/0413—MIMO systems
- H04B7/0456—Selection of precoding matrices or codebooks, e.g. using matrices antenna weighting
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/02—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas
- H04B7/04—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas
- H04B7/0413—MIMO systems
- H04B7/0456—Selection of precoding matrices or codebooks, e.g. using matrices antenna weighting
- H04B7/046—Selection of precoding matrices or codebooks, e.g. using matrices antenna weighting taking physical layer constraints into account
- H04B7/0469—Selection of precoding matrices or codebooks, e.g. using matrices antenna weighting taking physical layer constraints into account taking special antenna structures, e.g. cross polarized antennas into account
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/02—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas
- H04B7/04—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas
- H04B7/0413—MIMO systems
- H04B7/0417—Feedback systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/02—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas
- H04B7/04—Diversity systems; Multi-antenna system, i.e. transmission or reception using multiple antennas using two or more spaced independent antennas
- H04B7/0413—MIMO systems
- H04B7/0456—Selection of precoding matrices or codebooks, e.g. using matrices antenna weighting
- H04B7/0478—Special codebook structures directed to feedback optimisation
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Mobile Radio Communication Systems (AREA)
- Radio Transmission System (AREA)
Abstract
本申请提供了一种信道测量方法和通信装置。该方法包括:终端设备接收来自网络设备的预编码参考信号,该预编码参考信号是基于K个角度向量对参考信号预编码得到,该K个角度向量是基于上行信道测量得到;终端设备基于该预编码参考信号生成并发送第一指示信息,以便网络设备确定预编码矩阵。该第一指示信息用于指示至少一个时延向量以及对应于P个角度时延对的P个加权系数,其中,每个角度时延对包括K个角度向量中的一个角度向量和至少一个时延向量中的一个时延向量,该P个角度时延对和P个加权系数用于确定预编码矩阵。通过利用角度的上下行信道互易性,终端设备可以仅反馈用于构造预编码矩阵的时延向量和加权系数,减小了反馈开销。
Description
技术领域
本申请涉及无线通信领域,并且更具体地,涉及一种信道测量方法和通信装置。
背景技术
在大规模多输入多输出(massive multiple-input multiple-output,MassiveMIMO)技术中,网络设备可通过预编码减小多用户之间的干扰以及同一用户的多个信号流之间的干扰,有利于提高信号质量,实现空分复用,提高频谱利用率。
终端设备例如可以基于下行信道测量来确定预编码矩阵,并希望通过反馈,使得网络设备获得与终端设备确定的预编码矩阵相同或相近的预编码矩阵。具体地,终端设备例如可以通过反馈一个或多个波束向量及其加权系数的方式来指示预编码矩阵。终端设备的反馈具体可参考新无线(new radio,NR)协议TS38.214中定义的类型II(type II)码本反馈方式。
然而,这种反馈方式带来了较大的反馈开销。
发明内容
本申请提供一种信道测量方法和通信装置,以期降低反馈开销。
第一方面,提供了一种信道测量方法,该方法可以由终端设备执行,或者,也可以由配置于终端设备中的芯片执行。
具体地,该方法包括:接收预编码参考信号,该预编码参考信号是基于K个角度向量对参考信号预编码得到;生成第一指示信息,该第一指示信息用于指示至少一个时延向量以及对应于P个角度时延对的P个加权系数,该至少一个时延向量和该P个加权系数由预编码参考信号确定;其中,该P个角度时延对中的每个角度时延对包括该K个角度向量中的一个角度向量和该至少一个时延向量中的一个时延向量,该P个角度时延对及其对应的P个加权系数用于确定预编码矩阵;P和K均为正整数;发送该第一指示信息。
第二方面,提供了一种信道测量方法。该方法可以由网络设备执行,或者,也可以由配置有网络设备中的芯片执行。
具体地,该方法包括:发送预编码参考信号,该预编码参考信号是基于K个角度向量对参考信号预编码得到;接收第一指示信息,该第一指示信息用于指示至少一个时延向量以及对应于P个角度时延对的P个加权系数,该至少一个时延向量和该P个加权系数由预编码参考信号确定;其中,该P个角度时延对中的每个角度时延对包括该K个角度向量中的一个角度向量和该至少一个时延向量中的一个时延向量,该P个角度时延对及其对应的P个加权系数用于确定预编码矩阵;P和K均为正整数;根据该第一指示信息确定预编码矩阵。
基于上述技术方案,网络设备可以基于预先确定的角度向量,对下行参考信号进行预编码,使得终端设备可以根据预编码后的参考信号进行下行信道测量。由于网络设备基于预先确定的角度向量对参考信号进行了预编码,终端设备可以不必确定和反馈空域的向量(如上述角度向量),仅需确定和反馈与各角度向量对应的时延向量以及与各角度时延对对应的加权系数。因此,使得终端设备下行信道测量过程得以简化,降低了终端设备在信道测量过程中的计算复杂度,并且减小了终端设备的反馈开销。此外,基于多个空域和频域的向量来构建预编码矩阵,使得网络设备所确定的预编码矩阵能够与下行信道相适配,从而在减小反馈开销的同时仍能反馈精度。并且,通过角度向量对下行参考信号进行预编码,可以减小参考信号的端口数,从而降低导频开销。
结合第一方面或第二方面,在某些实现方式中,该K个角度向量基于上行信道测量确定。
通过利用上下行信道的互易性,网络设备将可互易的角度向量加载到下行参考信号,以对下行信道进行预补偿,以便于终端设备基于接收到的预编码参考信号,确定不具有完全互易性的下行信道的信息。因此,简化了终端设备对下行信道的测量过程,降低了终端设备在信道测量过程中的计算复杂度;同时可以保证反馈精度。
结合第一方面或第二方面,在某些实现方式中,该P个加权系数包括针对K个角度向量中的每个角度向量反馈的一个或多个加权系数;其中,针对该K个角度向量中的第k个角度向量,该第一指示信息用于指示Lk个加权系数,该Lk个加权系数与该P个角度时延对中的Lk个角度时延对对应,且该Lk个角度时延对中的每个角度时延对包括该第k个角度向量及其对应的Lk个时延向量中的一个时延向量;Lk≥1,且Lk为整数。
无论K个角度向量中的任意两个角度向量对应的时延向量是否相同,P个角度时延对中的每个角度时延对可对应一个加权系数。终端设备可以根据接收到的基于每个角度向量预编码的预编码参考信号,确定与每个角度向量对应的一个或多个加权系数。当各角度向量对应的时延向量相同时,与各角度向量对应的加权系数的个数相同。
结合第一方面或第二方面,在某些实现方式中,该Lk个加权系数是在多个RB上基于该第k个角度向量预编码得到的预编码参考信号进行信道估计得到的多个信道估计值确定。
基于一个角度向量预编码得到的预编码参考信号可以对应于一个端口。终端设备针对一个角度向量反馈的一个或多个加权系数可以是基于一个端口的预编码参考信号进行信道估计得到。因此,对应于P个角度时延对的P个加权系数可以是在多个RB上基于K个角度向量预编码得到的预编码参考信号进行信道估计得到的多个信道估计值确定。
结合第一方面或第二方面,在某些实现方式中,该至少一个时延向量包括针对该K个角度向量中的每个角度向量反馈的一个或多个时延向量;其中,针对该K个角度向量中的第k个角度向量,该第一指示信息用于指示Lk个时延向量,该第k个角度向量和该Lk个时延向量用于确定该P个角度时延对中的Lk个角度时延对;Lk≥1,且Lk为整数。
终端设备可以针对K个角度向量中的每个角度向量反馈一个或多个时延向量。针对一个角度向量反馈的一个或多个时延向量可以与该角度向量构成用于确定预编码矩阵的一个或多个角度时延对。
可选地,该方法还包括:接收第二指示信息,该第二指示信息用于指示针对该K个角度向量中的每个角度向量反馈的时延向量的个数。
可选地,该方法还包括:发送第二指示信息,该第二指示信息用于指示针对该K个角度向量中的每个角度向量反馈的时延向量的个数。
可选地,针对该K个角度向量中的每个角度向量反馈的时延向量的个数为预定义值。
也就是说,针对每个角度向量反馈的时延向量的个数可以由网络设备指示,以减小终端设备的反馈开销;也可以由终端设备确定并上报网络设备,以更好地与下行信道适配;还可以预先定义,如协议定义,以减小信令开销。
结合第一方面或第二方面,在某些实现方式中,该Lk个时延向量是在多个RB上基于该第k个角度向量预编码得到的预编码参考信号进行信道估计得到的多个信道估计值确定。
基于一个角度向量预编码得到的预编码参考信号可以对应于一个端口。终端设备针对一个角度向量反馈的一个或多个时延向量可以是基于一个端口的预编码参考信号进行信道估计得到。
结合第一方面或第二方面,在某些实现方式中,针对该K个角度向量中的第一角度向量反馈的时延向量与第二角度向量反馈的时延向量相同,该第一角度向量和该第二角度向量为该K个角度向量中的任意两个角度向量;该第一指示信息用于指示L个时延向量。
也就是说,该L个时延向量可以被K个角度向量共用,该L个时延向量和K个角度向量可两两组合,得到可用于构建预编码矩阵的K×L角度时延对。可选地,该方法还包括:接收第二指示信息,该第二指示信息用于指示L的值。
可选地,该方法还包括:发送第二指示信息,该第二指示信息用于指示L的值。
可选地,L为预定义值。
也就是说,L的值可以由网络设备指示,以减小终端设备的反馈开销;也可以由终端设备确定并上报网络设备,以更好地与下行信道适配;还可以预先定义,如协议定义,以减小信令开销。
结合第一方面或第二方面,在某些实现方式中,该L个时延向量是在多个RB上基于该K个角度向量预编码得到的预编码参考信号进行信道估计得到的多个信道估计值确定。
终端设备可以基于K个端口的预编码参考信号确定可以被K个角度向量共用的L个时延向量。
第三方面,提供了一种信道测量方法。该方法可以由终端设备执行,或者,也可以由配置于终端设备中的芯片执行。
具体地,该方法包括:接收预编码参考信号,该预编码参考信号是基于K个时延向量对参考信号预编码得到;生成第三指示信息,该第三指示信息用于指示至少一个角度向量以及对应于P个角度时延对的P个加权系数,该至少一个角度向量和该P个加权系数由该预编码参考信号确定;其中,该P个角度时延对中的每个角度时延对包括该K个时延向量中的一个时延向量和该至少一个角度向量中的一个角度向量,该P个角度时延对及其对应的P个加权系数用于确定预编码矩阵;P和K均为正整数;发送该第三指示信息。
第四方面,提供了一种信道测量方法。该方法可以由网络设备执行,或者,也可以由配置于网络设备中的芯片执行。
具体地,该方法包括:发送预编码参考信号,该预编码参考信号是基于K个时延向量对参考信号预编码得到;接收第三指示信息,该第三指示信息用于指示至少一个角度向量以及对应于P个角度时延对的P个加权系数,该至少一个角度向量和该P个加权系数由该预编码参考信号确定;其中,该P个角度时延对中的每个角度时延对包括该K个时延向量中的一个时延向量和该至少一个角度向量中的一个角度向量,该P个角度时延对及其对应的P个加权系数用于确定预编码矩阵;P和K均为正整数;根据该第三指示信息确定该预编码矩阵。
基于上述技术方案,网络设备可以基于预先确定的时延向量,对下行参考信号进行预编码,使得终端设备可以根据预编码后的参考信号进行下行信道测量。由于网络设备基于预先确定的时延向量对参考信号进行了预编码,终端设备可以不必确定和反馈频域的向量(如上述时延向量),仅需确定和反馈与各时延向量对应的角度向量以及与各角度时延对对应的加权系数。因此,使得终端设备下行信道测量过程得以简化,降低了终端设备在信道测量过程中的计算复杂度,并且减小了终端设备的反馈开销。此外,基于多个空域和频域的向量来构建预编码矩阵,使得网络设备所确定的预编码矩阵能够与下行信道相适配,从而在减小反馈开销的同时仍能反馈精度。
结合第三方面或第四方面,在某些实现方式中,该L个时延向量基于上行信道测量确定。
通过利用上下行信道的互易性,网络设备将可互易的时延向量加载到下行参考信号,以对下行信道进行预补偿,以便于终端设备基于接收到的预编码参考信号,确定不具有完全互易性的下行信道的信息。因此,简化了终端设备对下行信道的测量过程,降低了终端设备在信道测量过程中的计算复杂度;同时可以保证反馈精度。
结合第三方面或第四方面,在某些实现方式中,该P个加权系数包括针对L个时延向量中的每个时延向量反馈的一个或多个加权系数;其中,针对该L个时延向量中的第l个加权系数,该第一指示信息用于指示Kl个加权系数,该Kl个加权系数与P个角度时延对中的Kl个角度时延对对应,且该Kl个角度时延对中的每个角度时延对包括该第l个时延向量及其对应的Kl个角度向量中的一个角度向量;Kl≥1,Kl且为整数。
无论L个时延向量中的任意两个时延向量对应的角度向量是否相同,P个角度时延对中的每个角度时延对可对应一个加权系数。终端设备可以根据接收到的基于每个时延向量预编码的预编码参考信号,确定与每个时延向量对应的一个或多个加权系数。当各时延向量对应的角度向量相同时,与各时延向量对应的加权系数的个数相同。
结合第三方面或第四方面,在某些实现方式中,该Kl个加权系数是在多个RB上基于该第l个时延向量预编码得到的预编码参考信号进行信道估计得到的多个信道估计值确定。
基于一个时延向量预编码得到的预编码参考信号可以对应于一个端口。终端设备针对一个时延向量反馈的一个或多个加权系数可以是基于一个端口的预编码参考信号进行信道估计得到。因此,对应于P个角度时延对的P个加权系数可以是在多个RB上基于L个时延向量预编码得到的预编码参考信号进行信道估计得到的多个信道估计值确定。
结合第三方面或第四方面,在某些实现方式中,该至少一个角度向量包括针对L个时延向量中的每个时延向量反馈的一个或多个角度向量;其中,针对该L个时延向量中的第l个时延向量,该第三指示信息用于指示Kl个角度向量,该第l个时延向量和该Kl个角度向量用于确定该P个角度时延对中的Kl个角度时延对;Kl≥1,且Kl为整数。
终端设备可以针对L个时延向量中的每个角度向量反馈一个或多个角度向量。针对一个角度向量反馈的一个或多个角度向量可以与该时延向量构成用于确定预编码矩阵的一个或多个角度时延对。
可选地,该方法还包括:接收第四指示信息,该第四指示信息用于指示针对该L个时延向量中的每个时延向量反馈的角度向量的个数。
可选地,该方法还包括:发送第四指示信息,该第四指示信息用于指示针对该L个时延向量中的每个时延向量反馈的角度向量的个数。
可选地,针对该L个时延向量中的每个时延向量反馈的角度向量的个数为预定义值。
也就是说,针对每个时延向量反馈的角度向量的个数可以由网络设备指示,以减小终端设备的反馈开销;也可以由终端设备确定并上报网络设备,以更好地与下行信道适配;还可以预先定义,如协议定义,以减小信令开销。结合第三方面或第四方面,在某些实现方式中,该Kl个角度向量是在多个RB上基于该第l个时延向量预编码得到的预编码参考信号进行信道估计得到的多个信道估计值确定。
基于一个时延向量预编码得到的预编码参考信号可以对应于一组端口。终端设备针对一个时延向量反馈的一个或多个角度向量可以是基于一组端口的预编码参考信号进行信道估计得到。
结合第三方面或第四方面,在某些实现方式中,针对该K个角度向量中的第一角度向量反馈的时延向量与第二角度向量反馈的时延向量相同,该第一角度向量和该第二角度向量为该K个角度向量中的任意两个角度向量;该第一指示信息用于指示K个角度向量。
也就是说,该K个角度向量可以被L个时延向量共用,该L个时延向量和K个角度向量可两两组合,得到可用于构建预编码矩阵的K×L角度时延对。
可选地,该方法还包括:接收第四指示信息,该第四指示信息用于指示K的值。
可选地,该方法还包括:发送第四指示信息,该第四指示信息用于指示K的值。
可选地,K为预定义值。
也就是说,K的值可以由网络设备指示,以减小终端设备的反馈开销;也可以由终端设备确定并上报网络设备,以更好地与下行信道适配;还可以预先定义,如协议定义,以减小信令开销。
结合第一方面至第四方面中的任一方面,在某些实现方式中,该P个角度时延对对应于一个接收天线。
即,上述第一指示信息和第三指示信息可以是基于接收天线反馈的。此情况下,终端设备可以基于接收到的预编码参考信号反馈每个接收天线对应的P个加权系数。网络设备可以根据每个接收天线对应的加权系数重构下行信道,进而确定预编码矩阵。
结合第一方面至第四方面中的任一方面,在某些实现方式中,所述P个角度时延对对应于一个一个传输层。
即,上述第一指示信息和第三指示信息可以是基于传输层反馈的。此情况下,终端设备可以基于接收到的预编码参考信号确定传输层数,并基于每个传输层反馈P个加权系数。网络设备可以根据每个传输层对应的加权系数直接确定预编码矩阵。
第五方面,提供了一种通信装置,包括用于执行第一方面或第三方面以及第一方面或第三方面中任一种可能实现方式中的方法的各个模块或单元。
第六方面,提供了一种通信装置,包括处理器。该处理器与存储器耦合,可用于执行存储器中的指令,以实现上述第一方面或第三方面以及第一方面或第三方面中任一种可能实现方式中的方法。可选地,该通信装置还包括存储器。可选地,该通信装置还包括通信接口,处理器与通信接口耦合。
在一种实现方式中,该通信装置为终端设备。当该通信装置为终端设备时,所述通信接口可以是收发器,或,输入/输出接口。
在另一种实现方式中,该通信装置为配置于终端设备中的芯片。当该通信装置为配置于终端设备中的芯片时,所述通信接口可以是输入/输出接口。
可选地,所述收发器可以为收发电路。可选地,所述输入/输出接口可以为输入/输出电路。
第七方面,提供了一种通信装置,包括用于执行第二方面或第四方面以及第二方面或第四方面中任一种可能实现方式中的方法的各个模块或单元。
第八方面,提供了一种通信装置,包括处理器。该处理器与存储器耦合,可用于执行存储器中的指令,以实现上述第二方面或第四方面以及第二方面或第四方面中任一种可能实现方式中的方法。可选地,该通信装置还包括存储器。可选地,该通信装置还包括通信接口,处理器与通信接口耦合。
在一种实现方式中,该通信装置为网络设备。当该通信装置为网络设备时,所述通信接口可以是收发器,或,输入/输出接口。
在另一种实现方式中,该通信装置为配置于网络设备中的芯片。当该通信装置为配置于网络设备中的芯片时,所述通信接口可以是输入/输出接口。
可选地,所述收发器可以为收发电路。可选地,所述输入/输出接口可以为输入/输出电路。
第九方面,提供了一种处理器,包括:输入电路、输出电路和处理电路。所述处理电路用于通过所述输入电路接收信号,并通过所述输出电路发射信号,使得所述处理器执行第一方面至第四方面以及第一方面至第四方面任一种可能实现方式中的方法。
在具体实现过程中,上述处理器可以为芯片,输入电路可以为输入管脚,输出电路可以为输出管脚,处理电路可以为晶体管、门电路、触发器和各种逻辑电路等。输入电路所接收的输入的信号可以是由例如但不限于接收器接收并输入的,输出电路所输出的信号可以是例如但不限于输出给发射器并由发射器发射的,且输入电路和输出电路可以是同一电路,该电路在不同的时刻分别用作输入电路和输出电路。本申请实施例对处理器及各种电路的具体实现方式不做限定。
第十方面,提供了一种处理装置,包括处理器和存储器。该处理器用于读取存储器中存储的指令,并可通过接收器接收信号,通过发射器发射信号,以执行第一方面至第四方面以及第一方面至第四方面任一种可能实现方式中的方法。
可选地,所述处理器为一个或多个,所述存储器为一个或多个。
可选地,所述存储器可以与所述处理器集成在一起,或者所述存储器与处理器分离设置。
在具体实现过程中,存储器可以为非瞬时性(non-transitory)存储器,例如只读存储器(read only memory,ROM),其可以与处理器集成在同一块芯片上,也可以分别设置在不同的芯片上,本申请实施例对存储器的类型以及存储器与处理器的设置方式不做限定。
应理解,相关的数据交互过程例如发送指示信息可以为从处理器输出指示信息的过程,接收能力信息可以为处理器接收输入能力信息的过程。具体地,处理器输出的数据可以输出给发射器,处理器接收的输入数据可以来自接收器。其中,发射器和接收器可以统称为收发器。
上述第十方面中的处理装置可以是一个芯片,该处理器可以通过硬件来实现也可以通过软件来实现,当通过硬件实现时,该处理器可以是逻辑电路、集成电路等;当通过软件来实现时,该处理器可以是一个通用处理器,通过读取存储器中存储的软件代码来实现,该存储器可以集成在处理器中,可以位于该处理器之外,独立存在。
第十一方面,提供了一种计算机程序产品,所述计算机程序产品包括:计算机程序(也可以称为代码,或指令),当所述计算机程序被运行时,使得计算机执行上述第一方面至第四方面以及第一方面至第四方面中任一种可能实现方式中的方法。
第十二方面,提供了一种计算机可读介质,所述计算机可读介质存储有计算机程序(也可以称为代码,或指令)当其在计算机上运行时,使得计算机执行上述第一方面至第四方面以及第一方面至第四方面中任一种可能实现方式中的方法。
第十三方面,提供了一种通信系统,包括前述的网络设备和终端设备。
附图说明
图1是适用于本申请实施例的信道测量方法的通信系统的示意图;
图2是本申请一实施例提供的信道测量方法的示意性流程图;
图3是本申请实施例提供的多个RB承载多个端口的预编码参考信号的一示意图;
图4是本申请实施例提供的位图的示意图;
图5是本申请另一实施例提供的信道测量方法的示意性流程图;
图6是本申请实施例提供的多个RB承载多个端口的预编码参考信号的另一示意图;
图7是本申请实施例提供的通信装置的示意性框图;
图8是本申请实施例提供的终端设备的结构示意图;
图9是本申请实施例提供的网络设备的结构示意图。
具体实施方式
下面将结合附图,对本申请中的技术方案进行描述。
本申请实施例的技术方案可以应用于各种通信系统,例如:全球移动通信(globalsystem for mobile communications,GSM)系统、码分多址(code division multipleaccess,CDMA)系统、宽带码分多址(wideband code division multiple access,WCDMA)系统、通用分组无线业务(general packet radio service,GPRS)、长期演进(long termevolution,LTE)系统、LTE频分双工(frequency division duplex,FDD)系统、LTE时分双工(time division duplex,TDD)、通用移动通信系统(universal mobiletelecommunication system,UMTS)、全球互联微波接入(worldwide interoperabilityfor microwave access,WiMAX)通信系统、第五代(5th generation,5G)系统或新无线(NR)等。
为便于理解本申请实施例,首先以图1中示出的通信系统为例详细说明适用于本申请实施例的通信系统。图1是适用于本申请实施例的指示预编码向量的方法的通信系统100的示意图。如图1所示,该通信系统100可以包括至少一个网络设备,例如图1所示的网络设备110;该通信系统100还可以包括至少一个终端设备,例如图1所示的终端设备120。网络设备110与终端设备120可通过无线链路通信。各通信设备,如网络设备110或终端设备120,均可以配置多个天线。对于该通信系统100中的每一个通信设备而言,所配置的多个天线可以包括至少一个用于发送信号的发射天线和至少一个用于接收信号的接收天线。因此,该通信系统100中的各通信设备之间,如网络设备110与终端设备120之间,可通过多天线技术通信。
应理解,该通信系统中的网络设备可以是任意一种具有无线收发功能的设备或可设置于该设备的芯片,该设备包括但不限于:演进型节点B(evolved Node B,eNB)、无线网络控制器(radio network controller,RNC)、节点B(Node B,NB)、基站控制器(basestation controller,BSC)、基站收发台(base transceiver station,BTS)、家庭基站(例如,home evolved NodeB,或Home Node B,HNB)、基带单元(baseband Unit,BBU),无线保真(wireless fidelity,WIFI)系统中的接入点(access point,AP)、无线中继节点、无线回传节点、传输点(transmission point,TP)或者发送接收点(transmission and receptionpoint,TRP)等,还可以为5G,如NR,系统中的gNB,或,传输点(TRP或TP),5G系统中的基站的一个或一组(包括多个天线面板)天线面板,或者,还可以为构成gNB或传输点的网络节点,如基带单元(BBU),或,分布式单元(distributed unit,DU)等。
在一些部署中,gNB可以包括集中式单元(centralized unit,CU)和DU。gNB还可以包括射频单元(radio unit,RU)。CU实现gNB的部分功能,DU实现gNB的部分功能,比如,CU实现无线资源控制(radio resource control,RRC),分组数据汇聚层协议(packet dataconvergence protocol,PDCP)层的功能,DU实现无线链路控制(radio link control,RLC)、媒体接入控制(media access control,MAC)和物理(physical,PHY)层的功能。由于RRC层的信息最终会变成PHY层的信息,或者,由PHY层的信息转变而来,因而,在这种架构下,高层信令,如RRC层信令或PHCP层信令,也可以认为是由DU发送的,或者,由DU+RU发送的。可以理解的是,网络设备可以为CU节点、或DU节点、或包括CU节点和DU节点的设备。此外,CU可以划分为接入网RAN中的网络设备,也可以将CU划分为核心网CN中的网络设备,在此不做限制。
还应理解,该通信系统中的终端设备也可以称为用户设备(user equipment,UE)、接入终端、用户单元、用户站、移动站、移动台、远方站、远程终端、移动设备、用户终端、终端、无线通信设备、用户代理或用户装置。本申请的实施例中的终端设备可以是手机(mobile phone)、平板电脑(pad)、带无线收发功能的电脑、虚拟现实(virtual reality,VR)终端设备、增强现实(augmented reality,AR)终端设备、工业控制(industrialcontrol)中的无线终端、无人驾驶(self driving)中的无线终端、远程医疗(remotemedical)中的无线终端、智能电网(smart grid)中的无线终端、运输安全(transportationsafety)中的无线终端、智慧城市(smart city)中的无线终端、智慧家庭(smart home)中的无线终端等等。本申请的实施例对应用场景不做限定。
还应理解,图1仅为便于理解而示例的简化示意图,该通信系统100中还可以包括其他网络设备或者还可以包括其他终端设备,图1中未予以画出。
为了便于理解本申请实施例,下面简单说明下行信号在发送之前在物理层的处理过程。应理解,下文所描述的对下行信号的处理过程可以由网络设备执行,也可以由配置于网络设备中的芯片执行。为方便说明,下文统称为网络设备。
网络设备在物理信道可对码字(code word)进行处理。其中,码字可以为经过编码(例如包括信道编码)的编码比特。码字经过加扰(scrambling),生成加扰比特。加扰比特经过调制映射(modulation mapping),得到调制符号。调制符号经过层映射(layermapping),被映射到多个层(layer),或者称,传输层。经过层映射后的调制符号经过预编码(precoding),得到预编码后的信号。预编码后的信号经过资源元素(resource element,RE)映射后,被映射到多个RE上。这些RE随后经过正交复用(orthogonal frequencydivision multiplexing,OFDM)调制后通过天线端口(antenna port)发射出去。
应理解,上文所描述的对下行信号的处理过程仅为示例性描述,不应对本申请构成任何限定。对下行信号的处理过程具体可以参考现有技术,为了简洁,这里省略对其具体过程的详细说明。
为便于理解本申请实施例,首先对本申请中涉及的几个术语做简单说明。
1、预编码技术:网络设备可以在已知信道状态的情况下,借助与信道状态相匹配的预编码矩阵来对待发送信号进行处理,使得经过预编码的待发送信号与信道相适配,从而使得接收设备消除信道间影响的复杂度降低。因此,通过对待发送信号的预编码处理,接收信号质量(例如信号与干扰加噪声比(signal to interference plus noise ratio,SINR)等)得以提升。因此,采用预编码技术,可以实现发送设备与多个接收设备在相同的时频资源上传输,也就是实现了多用户多输入多输出(multiple user multiple inputmultiple output,MU-MIMO)。应理解,本文中有关预编码技术的相关描述仅为便于理解而示例,并非用于限制本申请实施例的保护范围。在具体实现过程中,发送设备还可以通过其他方式进行预编码。例如,在无法获知信道信息(例如但不限于信道矩阵)的情况下,采用预先设置的预编码矩阵或者加权处理方式进行预编码等。为了简洁,其具体内容本文不再赘述。
2、信道互易性:在时分双工(time division duplexing,TDD)模式下,上下行信道在相同的频域资源上不同的时域资源上传输信号。在相对较短的时间(如,信道传播的相干时间)之内,可以认为上、下行信道上的信号所经历的信道衰落是相同的。这就是上下行信道的互易性。例如,上行信道HUL和下行信道HDL可满足:HDL=HUL H。基于上下行信道的互易性,网络设备可以根据上行参考信号,如探测参考信号(sounding reference signal,SRS),测量上行信道。并可以根据上行信道来估计下行信道,从而可以确定用于下行传输的预编码矩阵。
然而,在频分双工(frequency division duplexing,FDD)模式下,由于上下行信道的频带间隔远大于相干带宽,上下行信道不具有完整的互易性,利用上行信道来确定用于下行传输的预编码矩阵可能并不能够与下行信道相适配。但是,FDD模式下的上下行信道仍然具有部分的互易性,例如,角度的互易性和时延的互易性。因此,角度和时延也可以称为互易性参数。
由于信号在经过无线信道传输时,从发射天线可以经过多个路径到达接收天线。多径时延导致频率选择性衰落,就是频域信道的变化。时延是无线信号在不同传输路径上的传输时间,由距离和速度决定,与无线信号的频域没有关系。信号在不同的传输路径上传输时,由于距离不同,存在不同的传输时延。因此,时延在FDD模式下的上下行信道可以认为是相同的,或者说,互易的。
此外,角度可以是指信号经由无线信道到达接收天线的到达角(angle ofarrival,AOA),也可以是指通过发射天线发射信号的离开角(Angle of Departure,AOD)。在本申请实施例中,该角度可以是指上行信号到达网络设备的到达角,也可以是指网络设备发射下行信号的离开角。该上行参考信号的到达角和下行参考信号的离开角可以认为是相同的,或者说,互易的。
因此可以认为,时延和角度在FDD模式下的上下行信道具有互易性。在本申请实施例中,每个角度可以通过一个角度向量来表征。每个时延可通过一个时延向量来表征。
3、参考信号(reference signal,RS)与预编码参考信号:参考信号也可以称为导频(pilot)、参考序列等。在本申请实施例中,参考信号可以是用于信道测量的参考信号。例如,该参考信号可以是用于下行信道测量的信道状态信息参考信号(channel stateinformation reference signal,CSI-RS),也可以是用于上行信道测量的探测参考信号(sounding reference signal,SRS)。应理解,上文列举的参考信号仅为示例,不应对本申请构成任何限定。本申请并不排除在未来的协议中定义其他参考信号以实现相同或相似功能的可能。
预编码参考信号可以是对参考信号进行预编码后得到的参考信号。其中,预编码具体可以包括波束赋形(beamforming)和/或相位旋转。其中,波束赋形例如可以通过基于一个或多个角度向量对下行参考信号进行预编码来实现,相位旋转例如可以通过将一个或多个时延向量对下行参考信号进行预编码来实现。
在本申请实施例中,为方便区分和说明,将经过预编码,如波束赋形和/或相位旋转,得到的参考信号称为预编码参考信号;未经过预编码的参考信号简称为参考信号。
在本申请实施例中,基于一个或多个角度向量对下行参考信号进行预编码,也可以称为,将一个或多个角度向量加载到下行参考信号上,以实现波束赋形。基于一个或多个时延向量对下行参考信号进行预编码,也可以称为将一个或多个时延向量加载到下行参考信号上,以实现相位旋转。
4、端口(port):可以理解为被接收设备所识别的虚拟天线。在本申请实施例中,端口可以是指发射天线端口,例如,每个端口的参考信号可以是未经过预编码的参考信号,也可以是基于一个时延向量对参考信号进行预编码得到的预编码参考信号;端口也可以是指经过波束赋形后的参考信号端口,例如,每个端口的参考信号可以是基于一个角度向量对参考信号进行预编码得到的预编码参考信号,也可以是基于一个角度向量和一个时延向量对参考信号进行预编码得到的预编码参考信号。每个端口的信号可以通过一个或者多个RB传输。
其中,发射天线端口,可以是指实际的独立发送单元(transceiver unit,TxRU)。可以理解的是,若对参考信号做了空域预编码,则端口数可以是指参考信号端口数,该参考信号端口数可以小于发射天线端口数。
在下文示出的实施例中,在涉及发射天线端口时,可以是指未进行空域预编码的端口数。即,是实际的独立发送单元数。在涉及端口时,在不同的实施例中,可以是指发射天线端口,也可以是指参考信号端口。端口所表达的具体含义可以根据具体实施例来确定。
5、角度向量:可以理解为用于对参考信号进行波束赋形的预编码向量。通过波束赋形,可以使得发射出来的参考信号具有一定的空间指向性。因此,基于角度向量对参考信号进行预编码的过程也可以视为是空间域(或简称,空域)预编码的过程。
基于一个或多个角度向量对参考信号进行预编码后得到的预编码参考信号的端口数与角度向量的个数相同。当角度向量的个数K小于发射天线数T时,可以通过空域预编码来实现天线端口的降维,从而减小导频开销。
角度向量的长度可以为T,T可以表示一个极化方向上的发射天线端口数,T≥1,且T为整数。
可选地,角度向量取自离散傅里叶变换(Discrete Fourier Transform,DFT)矩阵。如,
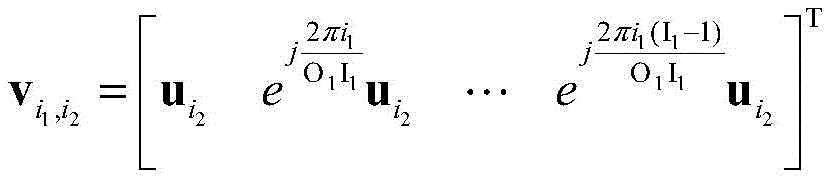

其中,I1为天线阵列中每一列(或行)中包含的同一极化方向的天线端口数,I2为天线阵列中每一行(或列)包含的同一极化方向的天线端口数。在本实施例中,T=I1×I2。O1和O2为过采样因子。i1和i2满足0≤i1≤(O1×I1-1),0≤i2≤(O2×I2-1)。
可选地,角度向量是均匀线阵(uniform linear array,ULA)的导向矢量。如, 其中,θk为角度,k=1,2,……,K。K表示角度向量的个数;λ为波长,d为天线间距。
其中,θk为角度,k=1,2,……,K。K表示角度向量的个数;λ为波长,d为天线间距。
其中,导向矢量可以表示一条径的到达角在不同天线的响应存在的相位差。导向矢量a(θk)与DFT矩阵中的向量 满足:
满足:
可选地,该角度向量是均匀面阵(uniform plane array,UPA)的导向矢量。该导向矢量例如可以是包含水平角和俯仰角信息的导向矢量。如,

其中,θk为水平角, 为俯仰角;ρt为第t个发射天线端口的三维坐标,t=1,2,……,T;uk为第k个角度对应的单位球基矢量:
为俯仰角;ρt为第t个发射天线端口的三维坐标,t=1,2,……,T;uk为第k个角度对应的单位球基矢量:
下文中为方便说明,将角度向量记作a(θk)。
假设发射天线为单极化天线,发射天线数为T;频域单元数为N,N≥1,且N为整数。则对于一个接收天线来说,信道可以是一个维度为N×T的矩阵。若基于一个角度向量对参考信号进行空域预编码,则对于一个接收天线来说,经过预编码后信道的维度可以为N×1。即,接收到的预编码参考信号可以表示成维度为N×1的矩阵。
进一步地,对于每个接收天线上的每个频域单元来说,信道可以是一个维度为1×T的矩阵。若基于一个角度向量对参考信号进行空域预编码,则可以将角度向量分别加载到参考信号上。由于角度向量的维度为T×1,故,对于一个接收天线来说,经过预编码后信道的维度可以为N×1。即,接收到的预编码参考信号可以表示成维度为N×1的矩阵。
由于加载了角度向量的参考信号可以通过下行信道传输至终端设备,因此,终端设备根据接收到的预编码参考信号测量的信道可以等效于加载了角度向量的信道。例如,将角度向量a(θk)加载到加载到下行信道V,可以表示为V(a(θk))*。
6、时延向量:本申请提出的可用于表示信道在频域的变化规律的向量。如前所述,多径时延导致频率选择性衰落。由傅里叶变换可知,信号在时域上的时间延迟,可以等效到频域的相位渐变。
例如,对于信号g(t),由傅里叶变换可以将该信号变换到频域上: 对于信号g(t-t0),由傅里叶变换可将该信号变换到频域上:
对于信号g(t-t0),由傅里叶变换可将该信号变换到频域上: 其中,ω为频率变量,不同频率对应的相位旋转不同;t和t-t0表示时延。
其中,ω为频率变量,不同频率对应的相位旋转不同;t和t-t0表示时延。
该两个时延的信号可以表示为x(t)=g(t)+g(t-t0),由此可以得到频率变量的函数 令g(ω)≡1,可以得到
令g(ω)≡1,可以得到 因此,两个不同时延的信号造成了频域选择性衰落。
因此,两个不同时延的信号造成了频域选择性衰落。
由于信道在各频域单元的相位变化与时延相关,故可将信道在各频域单元的相位的变化规律通过时延向量来表示。换句话说,该时延向量可用于表示信道的时延特性。
基于时延向量对参考信号进行预编码,实质上可以是指基于时延向量中的元素对频域上各个频域单元进行相位旋转,以通过预编码参考信号来对多径时延造成的频选特性进行预补偿。因此,基于时延向量对参考信号进行预编码的过程可以视为频域预编码的过程。
基于不同的时延向量对参考信号进行预编码,就相当于基于不同的时延向量对信道各个频域单元进行相位旋转。且,同一个频域单元相位旋转的角度可以不同。为了区分不同的时延,网络设备可以基于L个时延向量中的每个时延向量分别对参考信号进行预编码。
在本申请实施例中,为便于理解,以RB作为频域单元的一例来说明对参考信号进行频域预编码的具体过程。当将RB作为频域单元的一例时,可以认为每个频域单元仅包括一个用于承载参考信号的RB。事实上,每个频域单元可以包括一个或多个用于承载参考信号的RB。当每个频域单元中包括多个用于承载参考信号的RB时,网络设备可以将时延向量加载到每个频域单元中用于承载参考信号的多个RB上。
可选地,时延向量的长度为N,N为CSI测量资源的频域占用带宽中用于承载参考信号(如,本实施例中的预编码参考信号)的RB数,N≥1,且N为整数。
可选地,L个时延向量中的第l个时延向量可以表示为b(τl), 其中,l=1,2,……,L;L可以表示时延向量的个数;f1,f2,……,fN分别表示第1个、第2个至第N个RB的载波频率。
其中,l=1,2,……,L;L可以表示时延向量的个数;f1,f2,……,fN分别表示第1个、第2个至第N个RB的载波频率。
可选地,时延向量取自DFT矩阵。如, 该DFT矩阵中的每个向量可以称为DFT向量。
该DFT矩阵中的每个向量可以称为DFT向量。
其中,Of为过采样因子,Of≥1;k为DFT向量的索引,并满足0≤k≤Of×N-1或者1-Of×N≤k≤0。
例如,当k<0时,b(τl)与DFT矩阵中的向量uk可以满足:
b(τl)=ukβl且 其中
其中 Δf=fn-fn+1,1≤n≤N-1。
Δf=fn-fn+1,1≤n≤N-1。
下文中为方便说明,将时延向量记作b(τl)。
其中,CSI测量资源的频域占用带宽可以理解为用于传输参考信号的带宽,该参考信号可以是用于信道测量的参考信号,如CSI-RS。用于指示CSI测量资源的频域占用带宽的信令例如可以是CSI占用带宽范围(CSI-Frequency Occupation)。CSI测量资源的频域占用带宽也可以称为测量带宽、导频传输带宽等。下文中为方便说明,将CSI测量资源的频域占用带宽简称为测量带宽。
应理解,时延向量的长度为N仅为一种可能的设计,不应对本申请构成任何限定。下文中会结合不同的实施例定义不同时延向量的长度。这里暂且省略对其的详细说明。
假设发射天线为单极化天线,发射天线数为T;RB数为N。则对于一个接收天线而言,下行信道可以是一个维度为N×T的矩阵。若基于时延向量对参考信号进行频域预编码,则可以将该时延向量中的N个元素分别加载到承载于N个RB上的参考信号上。时延向量中的第n个元素可以加载到N个RB中的第n个RB上承载的参考信号上。
由于加载了时延向量的参考信号可以通过下行信道传输至终端设备,因此,终端设备根据接收到的预编码参考信号测量的信道可以等效于加载了时延向量的信道。例如,将时延向量中的第n个元素加载到第n个RB上的信道V(n)上,可以表示为
需要说明的是,基于时延向量对参考信号进行频域预编码可以是在资源映射之前执行,也可以是在资源映射之后执行,本申请对此不作限定。
应理解,时延向量是本申请提出的用于表示时延的一种形式。时延向量仅为便于与角度区分而命名,而不应对本申请构成任何限定。本申请并不排除在未来的协议中定义其他名称来表示相同或相似含义的可能。
7、频域单元:频域资源的单位,可表示不同的频域资源粒度。频域单元例如可以包括但不限于,子带(subband)、资源块(RB)、资源块组(resource block group,RBG)、预编码资源块组(precoding resource block group,PRG)等。
8、角度时延对:可以包括一个角度向量和一个时延向量。任意两个角度时延对中所包含的角度向量和/或时延向量不同。换句话说,每个角度时延对可以由一个角度向量和一个时延向量唯一确定。应理解,角度时延对可以理解为由一个角度向量和一个时延向量确定的空频基本单位的表现形式,但它并不一定是唯一的表现形式。例如,还可以表现为下文所述的空频分量矩阵、空频分量向量等。
9、空频分量矩阵:通过一个角度时延对可以确定一个空频分量矩阵。或者说,通过一个角度向量和一个时延向量可唯一地确定一个空频分量矩阵。一个空频分量矩阵和一个角度时延对之间可以相互转换。
一个空频分量矩阵例如可以由一个角度向量和一个时延向量的共轭转置的乘积确定,如为a(θk)×b(τl)H,其维度可以是T×N。
应理解,空频分量矩阵可以理解为由一个角度向量和一个时延向量确定的空频基本单位的另一种表现形式。空频基本单位例如还可以表现为空频分量向量,该空频分量向量例如由一个角度向量和一个时延向量的克罗内克(Kronecker)积确定。
还应理解,本申请对于空时基本单位的具体形式不作限定。本领域的技术人员基于相同的构思,由一个角度向量和一个时延向量确定的各种可能的形式均应落入本申请保护的范围内。此外,如果对角度向量和时延向量定义与上文列举不同的形式,空频分量矩阵与角度向量、时延向量的运算关系、空频分量向量与角度向量、时延向量的运算关系也可能不同。例如,空频分量矩阵也可以由一个时延向量的共轭和一个角度向量的转置的乘积确定,如b(τl)*×a(θk)T。本申请对于空频分量矩阵与角度向量、时延向量间的运算关系,以及空频分量向量与角度向量、时延向量间的运算关系不作限定。
10、空频矩阵:在本申请实施例中,空频矩阵是用于确定预编码矩阵的一个中间量。对于每个RB来说,预编码矩阵通常可以是一个维度T×Z的矩阵。其中,Z表示传输层数,Z≥1且为整数。
在本申请实施例中,空频矩阵可以基于每个接收天线确定,也可以基于每个传输层确定。
若空频矩阵基于接收天线确定,则该空频矩阵可以称为与接收天线对应的空频矩阵。与接收天线对应的空频矩阵可用于构建各RB的下行信道矩阵,进而可确定与各RB对应的预编码矩阵。与某一RB对应的信道矩阵例如可以是由各个接收天线对应的空频矩阵中对应于同一RB的列向量构造而成的矩阵的转置。如,将各接收天线对应的空频矩阵中的第n个列向量抽取出来,按照接收天线的顺序由左向右排布可得到维度为T×R的矩阵,R表示接收天线数,R≥1且为整数。该矩阵的转置可以得到第n个频域单元的信道矩阵V(n)。下文中会详细说明信道矩阵与空频矩阵的关系,这里暂且省略对二者关系的详细说明。
若空频矩阵基于传输层确定,则该空频矩阵可以称为与传输层对应的空频矩阵。与传输层对应的空频矩阵可直接用于确定与各RB对应的预编码矩阵。与某一RB对应的预编码矩阵例如可以是由各个传输层对应的空频矩阵中对应于同一RB的列向量构造而成的矩阵的共轭。如,将各传输层对应的空频矩阵中的第n个列向量抽取出来,按照传输层的顺序由左到右排布可得到维度为T×Z的矩阵,Z表示传输层数,Z≥1且为整数。该矩阵的共轭可以作为第n个频域单元的预编码矩阵W(n)。
下文实施例中会详细说明基于空频矩阵确定预编码矩阵的具体过程,这里暂且省略对该具体过程的详细描述。
需要说明的是,由本申请实施例提供的信道测量方法所确定的预编码矩阵可以是直接用于下行数据传输的预编码矩阵;也可以经过一些波束成形方法,例如包括迫零(zeroforcing,ZF)、正则化迫零(regularized zero-forcing,RZF)、最小均方误差(minimummean-squared error,MMSE)、最大化信漏噪比(signal-to-leakage-and-noise,SLNR)等,得到最终用于下行数据传输的预编码矩阵。本申请对此不作限定。下文中所涉及的预编码矩阵均可以是指基于本申请提供的信道测量方法确定的预编码矩阵。在本申请实施例中,空频矩阵可以由一个或多个角度时延对确定。例如,空频矩阵可以是一个或多个空频分量矩阵的加权和。空频矩阵也可以转换为空频向量的形式,空频向量也可以是一个或多个空频分量向量的加权和。
在NR协议TS38.214中定义了类型II(type II)码本反馈方式。下文示出了秩(rank)为1时通过type II码本反馈方式反馈的一例:

其中,W表示一个传输层、一个子带、两个极化方向上待反馈的预编码矩阵。W1可以通过宽带反馈,W2可以通过子带反馈。v0至v3为W1中包含的波束向量,该多个波束向量例如可通过该多个波束向量的组合的索引来指示。在上文中示出的预编码矩阵中,两个极化方向上的波束向量是相同的,均使用了波束向量v0至v3。a0至a7为W1中包含的宽带幅度系数,可通过宽带幅度系数的量化值来指示。c0至c7为W2中包含的子带系数,每个子带系数可以包括子带幅度系数和子带相位系数,如c0至c7可以分别包括子带幅度系数α0至α7以及子带相位系数 至
至 并可分别通过子带幅度系数α0至α7的量化值和子带相位系数
并可分别通过子带幅度系数α0至α7的量化值和子带相位系数 至
至 的量化值来指示。
的量化值来指示。
由于终端设备基于每个子带反馈幅度系数和相位系数,带来了较大的反馈开销。因此,一种基于频域的连续性,而多径时延导致频域选择性衰落,通过时延向量描述频域变化规律的反馈方式被提出。时延向量也可以理解为用于表示信道的时延特性的向量。
上文所述的空频矩阵也就是基于频域的连续性而提出的用于构建预编码矩阵的中间量。空频矩阵H可满足:H=SCFH。其中,S表示一个或多个(例如,K个)角度向量构造的矩阵,例如S=[a(θ1) a(θ2) … a(θK)],F表示一个或多个(例如,L个)时延向量构造的矩阵,例如F=[b(τ1) b(τ2) … b(τL)],C表示对应于一个角度向量和一个时延向量的加权系数。
在FDD模式下,由于时延和角度的上下行信道互易性,由上行信道测量得到的空频矩阵HUL可以表示为HUL=SCULFH,由下行信道测量得到的空频矩阵HDL可以表示为HDL=SCDLFH。因此,在本申请实施例中,通过下行信道测量来确定和反馈下行信道的系数矩阵CDL,便可以确定与下行信道相适配的预编码矩阵。
在一种实现方式中,对上式HDL=SCDLFH变形可以得到SHHDL=CDLFH,进一步变形可以得到(HDL TS*)T=CDLFH。HDL T是由真实信道确定的空频矩阵;HDL TS*是经过空域预编码后的真实信道,也就是,对下行参考信号仅加载了角度向量的情况下终端设备所观察到的信道。终端设备可以基于接收到的预编码参考信号进一步确定用于构建下行信道的时延向量以及各角度时延对的加权系数。
在另一种实现方式中,对上式HDL=SCDLFH变形可以得到HDLF=SCDL,进一步变形可以得到(FTHDL T)T=SCDL。HDL T是由真实信道确定的空频矩阵;FTHDL T表示将时延向量加载到下行信道上,终端设备测得的信道估计值的和。
具体地,网络设备在对下行信道加载时延向量的时候,由于SCDL可通过将FT中的每一行和HDL T中的每一列相乘得到。在本实施例中,FT中的每个行向量包括的元素数与HDL T中每个列向量包括的元素数可以均为N。当行向量与列向量相乘时,需要将行向量中的各元素(如第n个元素,n在1至N中遍历取值)分别与列向量中的相应元素(如第n个元素,n在1至N中遍历取值)相乘后再求和。但由于网络设备在加载时延向量时,并未经历下行信道,无法获取到下行信道各RB之间的相关性,故无法完成FTHDL T的运算。因此,网络设备在将时延向量加载到各个RB上时,仅仅是将FT中的各行向量中的元素与HDL T中各列向量中的元素相乘,而并未完成求和的操作。
终端设备在基于接收到的预编码参考信号进行信道估计得到各个RB上的信道估计值之后,再对基于同一时延向量的预编码参考信号估计得到的N个RB上的信道估计值求和,便可以得到FTHDL T,也就是得到了SCDL,进而可以确定用于构建下行信道的角度向量以及各角度时延对的加权系数。
由上文两种实现方式看到,基于终端设备反馈的系数矩阵CDL中的加权系数而确定的空频矩阵HDL可以是由真实信道V的转置得到。反之,信道矩阵V也可以是由本申请实施例中的空频矩阵HDL转置得到。
进一步地,由空频矩阵HDL可以确定预编码矩阵。其中,第n个频域单元的预编码矩阵可以是各传输层对应的空频矩阵中的第n个列向量构建的矩阵的共轭。
以对信道矩阵做SVD为例,由信道矩阵V做SVD可以得到预编码矩阵的共轭转置。而若将信道矩阵转置后再进行SVD,即,对VT做SVD,则正好可以得到预编码矩阵的共轭。因此,本申请实施例中由真实信道的转置所确定的空频矩阵HDL可以确定得到与各频域单元对应的预编码矩阵的共轭。反之,预编码矩阵W可以是由本申请实施例中的空频矩阵HDL共轭得到。
11、参考信号资源:参考信号资源可用于配置参考信号的传输属性,例如,时频资源位置、端口映射关系、功率因子以及扰码等,具体可参考现有技术。发送端设备可基于参考信号资源发送参考信号,接收端设备可基于参考信号资源接收参考信号。一个参考信号资源可以包括一个或多个RB。
在本申请实施例中,参考信号资源例如可以是CSI-RS资源。此外,为了便于理解本申请实施例,作出以下几点说明。
第一,为方便理解,下面对本申请中涉及到的主要参数做简单说明:
P:角度时延对的数量,P≥1且为整数;
N:频域单元数,N≥1且为整数;
T:一个极化方向上的发射天线端口数,T≥1且为整数;
K:角度向量数,K≥1且为整数;
L:时延向量数,L≥1且为整数;
R:接收天线数,R≥1且为整数;
Z:传输层数,Z≥1且为整数;
J:发射天线的极化方向数,J≥1且为整数;
M:频域组数,M>1且为整数。
第二,在本申请中,为便于描述,在涉及编号时,可以从1开始连续编号。例如,L个角度向量可以包括第1个角度向量至第L个角度向量;K个时延向量可以包括第1个时延向量至第K个时延向量。当然,具体实现时不限于此。例如,也可以从0开始连续编号。例如,L个角度向量可以包括第0个角度向量至第L-1个角度向量;K个时延向量可以包括第0个时延向量至第K-1个时延向量。
应理解,上文所述均为便于描述本申请实施例提供的技术方案而进行的设置,而并非用于限制本申请的范围。
第三,在本申请中,多处涉及矩阵和向量的变换。为便于理解,这里做同一说明。上角标T表示转置,如AT表示矩阵(或向量)A的转置;上角标*表示共轭,如,A*表示矩阵(或向量)A的共轭;上角标H表示共轭转置,如AH表示矩阵(或向量)A的共轭转置。后文中为了简洁,省略对相同或相似情况的说明。
第四,在下文示出的实施例中,以角度向量和时延向量均为列向量为例来说明本申请提供的实施例,但这不应对本申请构成任何限定。基于相同的构思,本领域的技术人员还可以想到其他更多可能的表现方式。
第五,在本申请中,“用于指示”可以包括用于直接指示和用于间接指示。当描述某一指示信息用于指示A时,可以包括该指示信息直接指示A或间接指示A,而并不代表该指示信息中一定携带有A。
将指示信息所指示的信息称为待指示信息,则具体实现过程中,对待指示信息进行指示的方式有很多种,例如但不限于,可以直接指示待指示信息,如待指示信息本身或者该待指示信息的索引等。也可以通过指示其他信息来间接指示待指示信息,其中该其他信息与待指示信息之间存在关联关系。还可以仅仅指示待指示信息的一部分,而待指示信息的其他部分则是已知的或者提前约定的。例如,还可以借助预先约定(例如协议规定)的各个信息的排列顺序来实现对特定信息的指示,从而在一定程度上降低指示开销。同时,还可以识别各个信息的通用部分并统一指示,以降低单独指示同样的信息而带来的指示开销。例如,本领域的技术人员应当明白,预编码矩阵是由预编码向量组成的,预编码矩阵中的各个预编码向量,在组成或者其他属性方面,可能存在相同的部分。
此外,具体的指示方式还可以是现有各种指示方式,例如但不限于,上述指示方式及其各种组合等。各种指示方式的具体细节可以参考现有技术,本文不再赘述。由上文所述可知,举例来说,当需要指示相同类型的多个信息时,可能会出现不同信息的指示方式不相同的情形。具体实现过程中,可以根据具体的需要选择所需的指示方式,本申请实施例对选择的指示方式不做限定,如此一来,本申请实施例涉及的指示方式应理解为涵盖可以使得待指示方获知待指示信息的各种方法。
此外,待指示信息可能存在其他等价形式,例如行向量可以表现为列向量,一个矩阵可以通过该矩阵的转置矩阵来表示,一个矩阵也可以表现为向量或者数组的形式,该向量或者数组可以由该矩阵的各个行向量或者列向量相互连接而成,等。本申请实施例提供的技术方案应理解为涵盖各种形式。举例来说,本申请实施例涉及的部分或者全部特性,应理解为涵盖该特性的各种表现形式。
待指示信息可以作为一个整体一起发送,也可以分成多个子信息分开发送,而且这些子信息的发送周期和/或发送时机可以相同,也可以不同。具体发送方法本申请不进行限定。其中,这些子信息的发送周期和/或发送时机可以是预先定义的,例如根据协议预先定义的,也可以是发射端设备通过向接收端设备发送配置信息来配置的。其中,该配置信息可以例如但不限于包括无线资源控制信令,例如RRC信令、MAC层信令,例如MAC-CE信令和物理层信令,例如下行控制信息(downlink control information,DCI)中的一种或者至少两种的组合。
第六,本申请对很多特性(例如,克罗内克积、CSI、RB、角度以及时延等)所列出的定义仅用于以举例方式来解释该特性的功能,其详细内容可以参考现有技术。
第七,在下文示出的实施例中第一、第二以及各种数字编号仅为描述方便进行的区分,并不用来限制本申请实施例的范围。例如,区分不同的指示信息等。
第八,在下文示出的实施例中,“预先获取”可包括由网络设备信令指示或者预先定义,例如,协议定义。其中,“预先定义”可以通过在设备(例如,包括终端设备和网络设备)中预先保存相应的代码、表格或其他可用于指示相关信息的方式来实现,本申请对于其具体的实现方式不做限定。
第九,本申请实施例中涉及的“保存”,可以是指的保存在一个或者多个存储器中。所述一个或者多个存储器,可以是单独的设置,也可以是集成在编码器或者译码器,处理器、或通信装置中。所述一个或者多个存储器,也可以是一部分单独设置,一部分集成在译码器、处理器、或通信装置中。存储器的类型可以是任意形式的存储介质,本申请并不对此限定。
第十,本申请实施例中涉及的“协议”可以是指通信领域的标准协议,例如可以包括LTE协议、NR协议以及应用于未来的通信系统中的相关协议,本申请对此不做限定。
第十一,“至少一个”是指一个或者多个,“多个”是指两个或两个以上。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,A和/或B,可以表示:单独存在A,同时存在A和B,单独存在B的情况,其中A,B可以是单数或者复数。字符“/”一般表示前后关联对象是一种“或”的关系。“以下至少一项(个)”或其类似表达,是指的这些项中的任意组合,包括单项(个)或复数项(个)的任意组合。例如,a、b和c中的至少一项(个),可以表示:a,或,b,或,c,或,a和b,或,a和c,或,b和c,或,a、b和c。其中a、b和c分别可以是单个,也可以是多个。
下面将结合附图详细说明本申请实施例提供的信道测量方法。
应理解,本申请实施例提供的方法可以应用于通过多天线技术通信的系统,例如,图1中所示的通信系统100。该通信系统可以包括至少一个网络设备和至少一个终端设备。网络设备和终端设备之间可通过多天线技术通信。
还应理解,下文示出的实施例并未对本申请实施例提供的方法的执行主体的具体结构特别限定,只要能够通过运行记录有本申请实施例的提供的方法的代码的程序,以根据本申请实施例提供的方法进行通信即可,例如,本申请实施例提供的方法的执行主体可以是终端设备或网络设备,或者,是终端设备或网络设备中能够调用程序并执行程序的功能模块。
以下,不失一般性,以网络设备与终端设备之间的交互为例详细说明本申请实施例提供的信道测量方法。
在一种实现方式中,网络设备可以基于预先确定的角度,对下行参考信号进行预编码,以便于终端设备基于接收到的预编码参考信号,估计并反馈下行信道的时延及其对应的加权系数。网络设备可以根据终端设备所反馈的下行信道的时延及其对应的加权系数,以及预先确定的角度,确定与下行信道相适配的预编码矩阵。
在另一种实现方式中,网络设备也可以基于预先确定的时延,对下行参考信号进行预编码,以便于终端设备基于接收到的预编码参考信号,估计并反馈下行信道的角度及其对应的加权系数。网络设备可以根据终端设备所反馈的下行信道的角度及其对应的加权系数,以及预先确定的时延,确定与下行信道相适配的预编码矩阵。
为便于理解,下文示出的实施例首先以一个极化方向为例详细说明本申请实施例提供的信道测量方法200的详细说明。应理解,该极化方向可以是网络设备所配置的发射天线的一个或多个极化方向中的任意一个极化方向。换句话说,对于任意一个极化方向的发射天线所发射的预编码参考信号,终端设备均可以基于本申请实施例提供的方法200进行信道测量。还应理解,本申请对于发射天线的极化方向数并不做限定,例如可以为一个,即,单极化方向;也可以为多个,如,双极化方向。
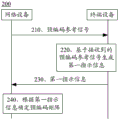
图2是从设备交互的角度示出的本申请实施例提供的信道测量方法200的示意性流程图。如图所示,该方法200可以包括步骤210至步骤240。下面详细说明方法200中的各步骤。
在步骤210中,终端设备接收预编码参考信号,该预编码参考信号是基于K个角度向量对参考信号预编码得到。相应地,网络设备发送该预编码参考信号。其中,K≥1,且K为整数。
在本申请实施例中,网络设备可以基于K个角度向量中的每个角度向量,对参考信号进行预编码,以得到对应于K个端口的预编码参考信号。每个端口的预编码参考信号是基于K个角度向量中的一个角度向量预编码得到。
由于角度具有上下行信道互易性,该K个角度向量可以基于上行信道测量确定。应理解,该K个角度向量也并不一定基于上行信道测量确定。例如,该K个角度向量可以是预定义的,如协议定义;或者,该K个角度向量可以是基于此前的一次或多次下行信道测量统计确定。本申请对于K个角度向量的确定方式不作限定。由于每个角度上可能有多个时延,该多个时延可对应于角度相同但时延不同的多条径。网络设备可以选择K个角度,并确定每个角度上需要终端设备估计的时延个数。
作为一个实施例,该K个角度向量以及每个角度向量对应的时延向量的个数可以基于上行信道测量确定。
具体地,网络设备可以根据预先估计得到的上行信道矩阵,确定较强的K个角度。该K个角度可以通过K个角度向量来表征。该K个角度向量例如可以取自预先定义的角度向量集合。可选地,该角度向量集合中的各角度向量取自DFT矩阵。该K个角度向量例如可通过对上行信道矩阵进行DFT确定。可选地,该角度向量集合中的各角度向量为导向矢量。
网络设备例如可以利用现有技术中的角度和时延联合估计(joint angle anddelay estimation,JADE)算法来确定该K个角度向量和与每个角度向量对应的较强的一个或多个时延向量。具体地,该估计算法例如可以是多重信号分类算法(multiple signalclassification algorithm,MUSIC)、巴特利特(Bartlett)算法或旋转不变子空间算法(estimation of signal parameters via rotation invariant technique algorithm,ESPRIT)等。本申请对于网络设备确定该K个角度向量和每个角度向量对应的时延个数的具体方法不作限定。
假设该角度向量和时延向量均取自DFT矩阵。预先定义的角度向量集合例如可以是由空域DFT矩阵中的多个向量构成的向量集合。为便于区分,将该向量集合称为空域向量集合Us,Us=[us,1 us,2 … us,T]。上述预先定义的时延向量集合例如可以是由频域DFT矩阵中的多个向量构成的向量集合。为便于区分,将该向量集合称为时延向量集合Uf,Uf=[uf,1uf,2 … uf,N]。
网络设备可以将上行信道估计得到的空频矩阵HUL做空域和频域的DFT变换,得到系数矩阵CUL如下: 其中,空频矩阵HUL的维度可以是T×N。
其中,空频矩阵HUL的维度可以是T×N。
在一种实现方式中,网络设备可以预定义角度向量的个数K。网络设备可以根据该系数矩阵中各行元素的模的平方和,确定模的平方和较大的K个行。该K个行在系数矩阵CUL中的位置可用于确定K个角度向量。如,该K个行在系数矩阵CUL中的位置可以是K个角度向量在由上述空域向量集合中的位置。网络设备可以进一步根据该系数矩阵CUL中模的平方和较大的K个行,确定每个角度向量对应的时延向量的个数。例如,网络设备可以根据该K个行中的第k(1≤k≤K,且k为整数)行中各元素的模的平方和大小,确定模的平方和大于预设值的元素个数。该预设值例如可以是此行元素的模的平方和的80%。第k行中模的平方和大于预设值的元素个数可以是第k个角度向量对应的时延向量的个数Lk(Lk≥1,且Lk为整数)。
在另一种实现方式中,网络设备可以预定义角度时延对的数量P(P≥1,且P为整数)。网络设备可以根据系数矩阵CUL中各元素的模长大小,确定模长较大的P个元素,并进一步确定该P个元素所在的行。该模长较大的P个元素所在的行数可以为K。该P个元素在系数矩阵CUL中的行可用于确定K个角度向量。网络设备还可进一步根据该P个元素在K个行的每一行中分布的个数确定每个角度向量对应的时延向量的个数。该P个元素在第k行中分布的个数可以是第k个角度向量对应的时延向量的个数Lk。
在上述两种实现方式中,至少两个角度向量对应的时延向量的个数可以不同。换句话说,K个角度向量中部分或全部角度向量对应的时延向量的个数可以相同。
每个角度向量和其所对应的一个或多个时延向量可组合得到一个或多个角度时延对,由K个角度向量及其对应的时延向量组合得到的角度时延对可用于确定预编码矩阵。后文步骤240中会对确定预编码矩阵的具体过程做详细说明,这里暂且省略对由角度时延对确定预编码矩阵的具体过程的详细描述。
在又一种实现方式中,网络设备预定义角度向量的个数K。网络设备可以根据该系数矩阵CUL中各行元素的模的平方和,确定模的平方和较大的K个行。该K个行在系数矩阵CUL中的位置可用于确定K个角度向量。网络设备可以进一步根据该K个行中各元素的模的平方的大小确定时延向量的个数。例如,网络设备可以根据该K个行中每行元素的模的平方,确定模的平方大于预设值的元素分布在几个列中。该预设值例如可以是K行元素的模的平方和的80%。网络设备可以将模长大小大于预设值的元素所分布的列数作为时延向量的个数L。
在这种实现方式中,各角度向量可以对应相同的L个时延向量。或者说,该L个时延向量可以是K个角度向量共用的。或者说,该L个时延向量可以与K个角度向量中的任意一个角度向量构成L个角度时延对。遍历该L个时延向量和K个角度向量,可以得到K×L个角度时延对,该K×L个角度时延对可用于确定预编码矩阵。后文步骤240中会对确定预编码矩阵的具体过程做详细说明,这里暂且省略对由角度时延对确定预编码矩阵的具体过程的详细描述。
应理解,上文仅为便于理解,列举了可用于网络设备确定K个角度向量和以及各角度向量对应的时延向量的个数的几种可能的方法。但这不应对本申请构成任何限定。例如,每个角度向量对应的时延向量的个数也可以是预定义值,如协议定义。本申请对于网络设备确定该K个角度向量和时延向量的个数的具体实现方式不作限定。
还应理解,每个角度向量对应的时延向量的个数可以是由网络设备基于上行信道测量确定,也可以是由终端设备基于下行信道测量确定,本申请对此不作限定。
此外,上行信道矩阵例如可以是由网络设备根据预先接收到的上行参考信号,如SRS,估计得到,或者根据正确解码之后的数据信号得到。本申请对此不作限定。网络设备估计上行信道矩阵的具体方法可以参考现有技术,为了简洁,这里省略对该具体方法的详细说明。
由于在FDD模式下,上下行信道的角度可互易,则可以将上行信道测量所得的K个角度向量加载至下行参考信号,以便进行下行信道测量。当然,上行信道测量所得的L个时延向量也可加载至下行参考信号,本实施例主要详细说明将K个角度向量加载至下行参考信号的情况。这种方式可以应用于FDD模式,尤其可以应用于FDD模式下时延的上下行互易性不是很好的场景。
网络设备可以基于该K个角度向量对下行参考信号,如CSI-RS,进行预编码,以得到预编码参考信号,并可以通过预先配置的参考信号资源传输该预编码参考信号。
可选地,该方法200还包括:终端设备接收第五指示信息,该第五指示信息用于配置一个参考信号资源。相应地,网络设备发送该第五指示信息。
该第五指示信息所配置的参考信号资源可用于承载预编码参考信号。该参考信号资源上承载的预编码参考信号可对应相同的一个或多个端口。
其中,该第五指示信息例如可以是高层信令,如RRC消息。本申请对此不作限定。
在一种可能的设计中,该第五指示信息可以通过高层参数配置CSI-RS资源(CSI-RS resource,即,参考信号资源的一例)。该高层参数例如可以包括CSI资源配置(CSI-ResourceConfig)和非零功率(non-zero power,NZP)CSI-RS资源集(NZP-CSI-RS-ResourceSet)。该高层参数可以为每个CSI-RS资源配置端口数、时频资源以及导频密度等。因此,终端设备可以基于该高层参数确定每个RB中承载的预编码参考信号所对应的端口数。
需要说明的是,在当前协议中,如在NR协议中,端口数可以是指一个RB上承载的预编码参考信号所对应的端口的个数。如前所述,当角度向量的个数为K时,对下行参考信号进行预编码后所得的预编码参考信号的端口数可以为K个。每个端口可以对应于一个角度向量。或者说,每个端口的预编码参考信号是基于一个角度向量对参考信号进行预编码得到。网络设备发送K个端口的预编码参考信号,可以是指,网络设备可将K个端口的预编码参考信号映射在同一个RB上。终端设备接收K个端口的预编码参考信号,可以是指,终端设备在一个RB上可以接收到的预编码参考信号对应K个端口。
应理解,一个RB上承载的预编码参考信号可对应K个端口,并不表示该参考信号仅承载于一个RB。网络设备可以将K个端口的预编码参考信号映射至测量带宽中的多个RB上,每个RB上承载的预编码参考信号均对应K个端口。终端设备可以在测量带宽的多个RB的每个RB上接收到K个端口的预编码参考信号。
网络设备可以基于K个角度向量中的第k个角度向量对参考信号进行预编码,以得到第k个端口的预编码参考信号。其中,k=1,2,……,K,且k为整数。换句话说,K个端口与K个角度向量之间可以一一对应。
为便于理解,图3示出了多个RB上承载多个端口的预编码参考信号的一例。
应理解,图3以及后文中示出的图5仅为示例,详细说明了分别将角度向量和时延向量加载到参考信号上时每个RB上承载的预编码参考信号与端口的对应关系。应理解,RB仅为频域单元的一种可能的形式。频域单元例如还可以是子带、PRB、RBG等。本申请对此不作限定。无论频域单元是怎样的形式,都可以包括一个或多个RB。换句话说,图3和图5中示出的RB可以是一个频域单元,也可以是一个频域单元中用于承载预编码参考信号的RB,本申请对此不作限定。
因此,预编码参考信号并不一定承载在测量带宽的每个RB上,也不一定承载在连续的多个RB上。换句话说,终端设备并不一定在测量带宽的每个RB上都能接收到上述多个端口的预编码参考信号。也就是说,网络设备并不一定将预编码参考信号映射到测量带宽的每个RB上。用于承载下行参考信号的RB可以离散地分布在测量带宽中。例如,每隔若干个RB有一个RB承载有下行参考信号。本申请对此不作限定。
例如,图3中的RB#1、RB#2、RB#3和RB#4在频域上并不一定是连续的,例如可以分别位于四个连续的待测量子带中,但彼此之间,如RB#1与RB#2之间,RB#2和RB#3之间,以及RB#3和RB#4之间,可能相隔了一个或多个RB。
此外,本申请对于每个频域单元中用于承载预编码参考信号的RB数也不作限定。例如,每个频域单元中可以有一个用于承载预编码参考信号的RB,也可以有多个用于承载预编码参考信号的RB。无论一个频域单元中承载预编码参考信号的RB数为一个还是多个,每个RB承载的预编码参考信号所对应的端口数不变。可以理解的是,当每个频域单元中包含多个用于承载预编码参考信号的RB时,同一个频域单元中各RB上承载的预编码参考信号对应的角度时延对可以相同或不同。或者说,同一个频域单元中各RB上承载预编码参考信号对应的端口号可以相同或不同,本申请对此不作限定。
下面以RB作为频域单元的一例,结合附图详细说明多个RB承载的预编码参考信号与端口的对应关系。RB作为频域单元的一例,也可以理解为,每个频域单元中仅包含一个用于承载参考信号的RB。
图3示出了多个RB承载多个端口的预编码参考信号的一例。图中示出了RB数为4的一例。图中示出的4个RB中,每个RB上承载的预编码参考信号可以对应4个端口,即K=4。该4个端口的预编码参考信号可以是基于4个不同的角度向量预编码得到。例如,端口#1的预编码参考信号可以是基于角度向量a(θ1)预编码得到;端口#2的预编码参考信号可以是基于角度向量a(θ2)预编码得到;端口#3的预编码参考信号可以是基于角度向量a(θ3)预编码得到;端口#4的预编码参考信号可以是基于角度向量a(θ4)预编码得到。
如图所示,同一端口的预编码参考信号在各RB中占用的RE相同,或者说,同一端口的预编码参考信号所占的资源在各RB中的相对位置相同。不同端口的预编码参考信号在同一RB中占用的RE可以不同,例如可以通过频分复用(frequency division multiplexing,FDM)或时分复用(time division multiplexing,TDM)的方式来区分;不同端口的预编码参考信号在同一RB中占用的RE也可以相同,例如可以通过码分复用(code divisionmultiplexing,CDM)的方式来区分。图中仅为示例,示出了端口#1、端口#2与端口#3、端口#4通过FDM区分,端口#1、端口#3与端口#2、端口#4通过TDM区分的一例。
应理解,图3仅为便于理解而示例,并未完整地示出一个RB中的全部RE,本申请对于每个RB中的RE数不作限定。此外,本申请对于每个RB上承载的预编码参考信号所对应的端口数以及各端口的参考信号之间复用资源的具体方式不作限定。
图中示出的4个RB可以是上文所述的参考信号资源的一例。该4个RB可以属于同一参考信号资源。应理解,图中仅为示例,示出了4个RB作为参考信号资源的一例。这不应对本申请构成任何限定。该参考信号资源可以包括更多或更少的RB,本申请对于参考信号资源中包括的RB数目不做限定。
如前所述,通过K个角度向量对参考信号进行预编码所得到的预编码参考信号,也就是通过波束赋形使得发射出来的预编码参考信号具有K个不同的空间指向性。该K个不同的空间指向性可以是终端设备能够识别的K个不同的端口。
在步骤220中,终端设备基于接收到的预编码参考信号,生成第一指示信息。该第一指示信息可用于指示至少一个时延向量以及P个加权系数。
由于预编码参考信号在经由无线信道被发送至终端设备时,经历了下行信道。因此,终端设备可以检测到不具有完全互易性的、下行信道的信息。终端设备可以基于接收到的K个端口的预编码参考信号,确定可用于构建与下行信道相适配的预编码矩阵的时延向量及其对应的加权系数。终端设备可以基于所确定的时延向量和加权系数生成第一指示信息。
如前所述,空频矩阵HDL满足HDL=SCDLFH。在本实施例中,HDL的维度可以是T×N;角度向量可以为K个,每个角度向量的长度可以是T,则S的维度可以是T×K;每个时延向量可以为L个,每个时延向量的长度可以是N,则F的维度可以是N×L。对上式变形可以得到:(HDL TS*)T=CDLFH。HDL T是由真实信道确定的空频矩阵;HDL TS*是经过空域预编码后的真实信道(或者称,等效信道),其维度可以是K×N。该矩阵中的每一列可以表示在一个RB上基于接收到的预编码参考信号估计得到的信道估计值。该矩阵的每一行可以表示在N个RB上接收到的对应于一个端口的信道估计值。
终端设备可以基于接收到的预编码参考信号进一步确定用于构建下行信道的时延向量以及各角度时延对的加权系数。
首先,终端设备可以基于K个端口的预编码参考信号,估计下行信道。
如前所述,K个端口中的每个端口的预编码参考信号是基于K个角度向量中的一个角度向量对参考信号预编码得到。K个端口与K个角度向量可以一一对应。因此,终端设备基于K个端口的预编码参考信号估计下行信道,也就是,基于由K个角度向量预编码得到的预编码参考信号估计下行信道。
若不考虑对参考信号做预编码,对于每个接收天线来说,下行信道的维度可以是N×T。在一个接收天线、一个RB上接收到的下行信道的维度可以是1×T。由于网络设备基于角度向量对参考信号进行了预编码,每个角度向量的维度可以为T×1,则终端设备基于在每个接收天线、每个RB上接收到的、对应于一个端口的预编码参考信号,进行信道估计所得的信道估计值的维度可以是1×1。由于网络设备基于K个角度向量对参考信号进行了预编码,则每个RB承载的预编码参考信号可以对应K个端口。该K个端口中的第k个端口所对应的预编码参考信号例如可以是基于上述K个角度向量中的第k个角度向量对参考信号预编码得到。换句话说,第k个端口的预编码参考信号可以用于确定与第k个角度向量对应的一个或多个时延向量以及一个或多个加权系数。该一个或多个加权系数分别是由该第k个角度向量与上述一个或多个时延向量所确定的一个或多个角度时延对的加权系数。
具体地,终端设备可以基于每个端口的预编码参考信号估计所对应的下行信道。例如,以K个端口中的第k个端口为例,终端设备可以基于第k个端口的预编码参考信号估计与第k个端口对应的下行信道。由于预编码参考信号承载在N个频域单元中,对于每个端口的预编码参考信号,终端设备在每个接收天线上接收到的信号可以表示成维度为1×N的矩阵,或者说,长度为N的行向量。则终端设备基于该第k个端口的预编码参考信号估计所得的下行信道y(k)的维度也为1×N。该1×N的下行信道y(k)也就是基于第k个角度向量预编码得到的预编码参考信号进行信道估计得到的信道估计值。该信道估计值中的N个元素与N个RB一一对应。每个元素可以由所对应的RB元上接收到的预编码参考信号进行信道估计得到。
应理解,终端设备基于预编码参考信号估计信道矩阵的具体方法可以参考现有技术中的信道估计方法,为了简洁,这里省略对该具体方法的详细说明。
此后,终端设备可以根据下行信道估计值,确定用于构成P个角度时延对的至少一个时延向量以及该P个角度时延对对应的P个加权系数。该至少一个时延向量和P个加权系数可以通过第一指示信息反馈给网络设备。
该至少一个时延向量和P个加权系数可以是终端设备基于下行信道的信道估计值确定,因此也可以说,该至少一个时延向量和P个加权系数可以基于K个端口的预编码参考信号确定。
在一种实现方式中,终端设备可以基于每个端口的预编码参考信号分别确定至少一个时延向量。或者说,终端设备可以针对每个角度向量分别确定至少一个时延向量。针对各角度向量确定的时延向量可以互不相同。针对各角度向量确定的时延向量也可以部分不同。当。当针对至少两个角度向量确定的时延向量不同时,终端设备可以基于每个角度向量确定对应的一个或多个时延向量。
例如,针对第k个角度向量,或者说,基于第k个端口的预编码参考信号,确定的时延向量为Lk个,Lk≥1,且为整数。由于该Lk个时延向量是基于第k个端口的预编码参考信号确定,因此可以视为与第k个端口对应的时延向量。与K个端口中的每个端口对应的角度向量和时延向量可用于构成P个角度时延对,即,终端设备确定的时延向量的数量为P, 1≤k≤K,且k为整数。
1≤k≤K,且k为整数。
其中,针对至少两个角度向量确定的时延向量不同,可以是指,至少有两个角度向量对应的时延向量不同,但其他角度向量对应的时延向量可以相同,也可以不同,本申请对此不作限定。换句话说,针对各角度向量确定的实验相爱难过了可以部分或全部不同。
其中,两个角度向量对应的时延向量不同,可以是指,两个角度向量对应的时延向量完全不同,即,没有重复,或者说,没有交集;也可以是指,两个角度向量对应的时延向量部分不同,即,有部分重复,但不完全相同,或者说,有交集,但不完全相同。此外,两个角度向量对应的时延向量不同时,两个角度向量对应的时延向量的个数可以相同,也可以不同,本申请对此不作限定。可以理解的是,该P个时延向量中可能包括一个或多个重复的时延向量。但由于该P个时延向量用于和不同的角度向量组合,以构成互不相同的P个角度时延对。终端设备仍需要针对每个角度向量确定和反馈对应的一个或多个时延向量,即,共计P个。
由于K个角度向量与K个端口可以一一对应,因此,终端设备基于每个端口的预编码参考信号确定一个或多个时延向量,也可以是指,终端设备针对每个角度向量确定一个或多个时延向量。
可选地,P个时延向量可以包括针对K个角度向量中每个角度向量确定的一个或多个时延向量。其中,基于第k个角度向量确定的Lk个时延向量可以是在多个RB上基于第k个角度向量预编码得到的预编码参考信号进行信道估计的多个信道估计值确定。
基于每个角度向量确定的时延向量的个数可以由网络设备指示。由于时延具有上下行信道互易性,网络设备可以根据上行信道测量所确定的时延个数,向终端设备指示下行信道测量需要反馈的时延个数。其中,每个时延可以通过一个时延向量来表征。可选地,在步骤220之前,该方法还包括:终端设备接收第二指示信息,该第二指示信息用于指示针对每个角度向量反馈的时延向量的个数。相应地,网络设备发送该第二指示信息。
网络设备例如可以通过物理层信令,如DCI,来携带该第二指示信息;网络设备也可以通过高层信令,如MAC CE或RRC消息,来携带该第二指示信息。本申请对此不作限定。
网络设备基于上行信道测量来确定各角度向量对应的时延个数,充分利用了上下行信道的互易性,可以减小终端设备的反馈开销。
基于每个角度向量确定的时延向量的个数也可以由终端设备确定,并上报网络设备。终端设备可以基于接收到的各端口的预编码参考信号,确定与各角度向量对应的一个或多个时延向量。终端设备在确定时延向量的同时,可以确定确定与各角度向量对应的时延向量的个数。可选地,该方法还包括:终端设备发送第二指示信息,该第二指示信息用于指示针对每个角度向量反馈的时延向量的个数。相应地,网络设备接收该第二指示信息。
由终端设备自行确定各角度向量对应的时延向量的个数时,终端设备可以根据下行信道的估计值来确定,后文中步骤220中会详细说明终端设备根据下行信道的估计值来确定各角度向量对应的时延向量的具体过程。这里暂且省略对该具体过程的详细描述。
终端设备例如可以在下文所述的第一指示信息中指示各角度向量对应的时延向量的个数。即,上述第二指示信息可以和第一指示信息为同一指示信息。或者,该第二指示信息也可以独立于第一指示信息,终端设备例如可以通过CSI来携带该第二指示信息。
终端设备基于下行信道测量来确定各角度向量对应的时延个数,能够更准确地基于下行信道的状态来反馈,特别适用于时延的上下行互易性不是很好的场景。
可选地,基于每个角度向量确定的时延向量的个数也可以是预定义值。例如,可以由协议预定义。
本申请对于针对每个角度向量反馈的时延向量的个数及该个数的获取方式不作限定。
终端设备可以根据基于第k个端口的预编码参考信号估计得到的下行信道的估计值,确定第k个端口对应的Lk个时延向量,或者说,第k个角度向量对应的Lk个时延向量。
需要说明的是,终端设备在确定第k个端口对应的Lk个时延向量时,可以根据协议定义或者预先接收到的第二指示信息确定Lk的值,也可以自行确定Lk的值,并通过第二指示信息上报网络设备。本申请对此不作限定。这里仅为方便说明,引入Lk,并不代表终端设备已经预先获知了Lk的值。
例如,终端设备可以通过DFT确定上述Lk个时延向量和Lk个加权系数。具体地,终端设备可以将基于第k个端口的预编码参考信号估计得到的下行信道的估计值y(k)分别投影至预先定义的时延向量集合中的各时延向量上,以得到多个投影值。
若终端设备预先获知了Lk的值,终端设备可以根据投影值的模的大小,确定较强的Lk个时延向量。该较强的Lk个时延向量可以是多个投影值中模较大的Lk个投影值所对应的时延向量。
若终端设备并未预先获知Lk的值,终端设备例如可以根据投影值的模的平方,确定模的平方大于预设值的元素个数。模的平方大于预设值的元素个数也就是与第k个角度向量对应的时延向量的个数Lk。终端设备可进一步从时延向量集合中确定Lk个时延向量。通过向时延向量集合中的各时延向量投影得到的、模的平方大于预设值的Lk个投影值所对应的Lk个时延向量可以确定为第k个角度向量对应的时延向量。上述模较大的Lk个投影值可以是与该Lk个时延向量对应的Lk个加权系数。换句话说,Lk个加权系数可以是终端设备在多个RB上基于第k个端口的预编码参考信号进行信道估计得到的多个信道估计值确定。
例如,与第k个角度向量对应的Lk个加权系数可以通过下文示出的矩阵运算获得: 该向量
该向量 中模较大的Lk个投影值即为上述与第k个角度向量对应的Lk个加权系数
中模较大的Lk个投影值即为上述与第k个角度向量对应的Lk个加权系数 可以理解,该Lk个加权系数均取自上述
可以理解,该Lk个加权系数均取自上述 中的N个元素。这里仅为便于区分,用不同的符号表示。
中的N个元素。这里仅为便于区分,用不同的符号表示。
需要说明的是,该Lk个加权系数可以是P个角度时延对中与第k个角度向量(或者说与第k个端口)对应的Lk个角度时延对的加权系数。该Lk个角度时延对中的每个角度时延对可以是由上述第k个角度向量和与第k个角度向量对应的Lk个时延向量中的每个时延向量确定。因此,该Lk个加权系数可以称为与Lk个时延向量对应的加权系数,或者,与第k个角度向量的加权系数。
应理解,终端设备基于下行信道的估计值y(k)确定时延向量的个数Lk、Lk个时延向量和Lk个加权系数的具体方法仅为便于理解而示例,不应对本申请构成任何限定。终端设备例如可以利用现有技术中的JADE算法等,或者通过上述DFT等方式,基于第k个端口的预编码参考信号估计得到对应的时延向量的个数Lk、Lk个时延向量和Lk个加权系数。为了简洁,这里不再一一举例说明。
还应理解,基于不同的实现方式和算法,终端设备可以通过同一处理步骤同时确定同一角度向量对应的时延向量和加权系数,也可以通过不同的处理步骤分别确定同一角度向量对应的时延向量和加权系数。本申请对此不作限定。
基于信道估计确定的Lk个时延向量及各时延向量的加权系数,下行信道的估计值y(k)可以近似为: 其中,
其中, 表示与第k个端口对应的Lk个时延向量中的第lk个时延向量,
表示与第k个端口对应的Lk个时延向量中的第lk个时延向量, 表示时延向量
表示时延向量 的加权系数。
的加权系数。
终端设备可以基于上文所述的方法,根据接收到的K个端口的预编码参考信号估计得到K组时延向量和K组加权系数。每组时延向量可对应一组加权系数。其中,第k组时延向量可以包含Lk个时延向量,第k组加权系数可以包含Lk个加权系数。
可以理解的是,K组时延向量中至少两组时延向量包含的时延向量的个数可以不同,或者,各组时延向量中包含的时延向量的个数可以两两相同。由于各组时延向量中包含的时延向量的个数可能相同或不同,各组加权系数中包含的加权系数的个数也可能相同或不同。本申请对此不作限定。
在另一种实现方式中,终端设备可以基于K个端口的预编码参考信号确定至少一个时延向量,例如记作L个,L≥1,且为整数。该L个时延向量可以是K个角度向量共用的时延向量,以用于构成P个角度时延对,即,P=K×L。
可选地,该第一指示信息用于指示L个时延向量,该L个时延向量是基于K个角度向量反馈。该K个角度向量中的任意两个角度向量对应的L个时延向量相同。也就是说说,K个角度向量中,针对第一角度向量反馈的一个或多个时延向量和针对第二角度向量反馈的至少一个时延向量相同。该第一角度向量和第二角度向量为K个角度向量中的任意两个角度向量。换句话说,该L个时延向量可以被K个角度向量共用。终端设备在通过上述第一指示信息指示该L个时延向量时,可以仅生成一个用于指示该L个时延向量的信息。
上述L的值可以是由网络设备预先通过信令指示。由于时延具有上下行信道互易性,网络设备可以根据上行信道测量所确定的时延个数,向终端设备指示下行信道测量需要反馈的时延个数。其中,每个时延可以通过一个时延向量来表征。可选地,在步骤220之前,该方法还包括:终端设备接收第二指示信息,该第二指示信息用于指示L的值。相应地,网络设备发送该第二指示信息。
终端设备例如可以通过物理层信令,如DCI,来携带该第二指示信息;终端设备也可以通过高层信令,如MAC CE或RRC消息,来携带该第二指示信息。本申请对此不作限定。
网络设备基于上行信道测量来确定各角度向量对应的时延个数,充分利用了上下行信道的互易性,可以减小终端设备的反馈开销。
上述L个是也可以是由终端设备确定,并上报网络设备。终端设备可以基于接收到的预编码参考信号,确定较强的时延向量的个数。可选地,该方法还包括:终端设备发送第二指示信息,该第二指示信息用于指示L的值。相应地,网络设备接收该第二指示信息。
终端设备例如可以在下文所述的第一指示信息中指示L的值。即,上述第二指示信息可以和第一指示信息为同一指示信息。或者,该第二指示信息也可以独立于第一指示信息,终端设备例如可以通过CSI来携带该第二指示信息。
终端设备基于下行信道测量来确定各角度向量对应的时延个数,能够更准确地基于下行信道的状态来反馈,特别适用于时延的上下行互易性不是很好的场景。
可选地,上述L也可以是预定义值。例如,可以由协议预定义。
本申请对于L的值及其获取方式不作限定。
该L个时延向量可以是基于K个端口的预编码参考信号确定的,也可以是基于某一端口的预编码参考信号确定的,本申请对此不作限定。
在一种实现方式中,终端设备可以将基于K个端口中每个端口的预编码参考信号估计得到的下行信道的估计值分别投影至预先定义的时延向量集合中的各时延向量上,以根据投影值的模确定与每个端口对应的较大的L个投影值。即,基于K个端口的信道估计值,可以投影得到K组投影值,每组投影值包括L个投影值。终端设备可以进一步根据每组投影值中的L个投影值的模的平方和的大小,确定L个时延向量。例如可以对K组投影值中的每组投影值的模的平方分别求和,将该K组投影值中模的平方和最大的一组投影值所对应的L个时延向量确定为待反馈的L个时延向量。
上述K组投影值中每组投影值中的L个投影值可以是与K个端口分别对应的L个加权系数。例如,第k组投影值中的L个投影值是与第k个端口对应的L个加权系数。换句话说,基于第k个端口的预编码参考信号,可以确定第k个端口对应的L个加权系数。该第k个端口对应的L个加权系数,也就是与第k个角度向量对应的L个加权系数。更具体地说,第k组投影值中的L个投影值可以是由第k个角度向量和L个时延向量分别组合构成的L个角度时延对的加权系数。因此,与第k个角度向量对应的L个加权系数可以是终端设备在多个RB上基于第k个端口的预编码参考信号进行信道估计得到的多个信道估计值确定。
应理解,终端设备基于K个端口的下行信道确定L个时延向量和P个加权系数的具体方法仅为便于理解而示例,不应对本申请构成任何限定。终端设备例如可以利用现有技术中的JADE算法等,或者通过上述DFT等方式,基于第k个端口的预编码参考信号估计得到对应的Lk个时延向量及各时延向量的加权系数。为了简洁,本文省略对终端设备确定时延向量和加权系数的具体方法的详细说明。
还应理解,基于不同的实现方式和算法,终端设备可以通过同一处理步骤同时确定L个时延向量和与不同端口对应的L个加权系数(即,共P个加权系数),也可以通过不同的处理步骤分别确定L个时延向量和P个加权系数。本申请对此不作限定。
终端设备可以基于上文所述的方法,根据接收到的K个端口的预编码参考信号估计得到一组时延向量和K组加权系数。其中,该组时延向量可以包含L个时延向量,每组加权系数可以包含L个加权系数。可以理解的是,由于这一组时延向量中的L个时延向量可以被K个角度向量共用,各组加权系数中包含的加权系数的个数均可以为L。
在上文列举的两种实现方式中,终端设备可以针对每个角度向量分别反馈一个或多个时延向量,也可以针对K个角度向量共同反馈一个或多个时延向量。终端设备基于每个角度向量分别反馈还是基于多个角度向量共同反馈,可以是协议预先定义,也可以由网络设备预先通过信令指示,例如可以通过信令显式指示,也可以通过上述第二指示信息隐式指示,如,若指示针对每个角度向量反馈的时延向量的个数,则表示基于每个角度向量分别反馈;若仅指示一个时延向量的个数,则表示基于多个角度向量共同反馈。本申请对此不作限定。
需要说明的是,上文中仅为便于理解,示出了每个RB承载的预编码参考信号对应K个端口的一例。事实上,各RB承载的预编码参考信号也可以基于不同的角度向量预编码得到。也就是说,各RB承载的预编码参考信号对应的角度向量可以是至少部分不同的。此时,各RB承载的预编码参考信号对应的端口数可以相同,也可以不同;各RB承载的预编码参考信号对应的端口号可以相同也可以不同。
例如,网络设备可以对测量带宽内的多个RB进行分组,得到多个频域组。同一频域组内的每个RB承载的预编码参考信号可以对应相同的角度向量,不同频域组内的RB承载的预编码参考信号可以对应不同的角度向量。在网络设备对RB进行了分组的情况下,终端设备仍然可以基于上文所述的方法,基于各端口的预编码参考信号,在多个RB上进行信道估计,以得到多个信道估计值,进而确定待反馈的一个或多个时延向量以及P个加权系数。
终端设备在确定了上述至少一个时延向量和P个加权系数之后,可以生成第一指示信息,来指示该至少一个时延向量以及P个加权系数。
当终端设备针对每个角度向量分别确定一个或多个时延向量时,终端设备可以基于每个角度向量预编码得到的预编码参考信号,或者说,每个端口的预编码参考信号,生成用于指示所对应的一个或多个时延向量的信息。
对于第k个端口,终端设备可以基于估计得到的Lk个时延向量及各时延向量的加权系数,以生成与第k个端口对应的量化信息,来指示Lk个时延向量及各时延向量的加权系数。可以理解,与第k个端口对应的量化信息属于上述与第一指示信息,或者说,与第k个端口对应的量化信息可以是上述第一指示信息中的至少部分信息。
该终端设备例如可以通过位图或索引等方式来指示时延向量。下文中示例性地列举了几种可能的实现方式。
方式一、终端设备通过位图来指示时延向量集合中被选择的一个或多个时延向量。
可选地,该第一指示信息包括K个位图,该K个位图中的第k个位图用于指示时延向量集合中的Lk个时延向量。
其中,每个位图包含的比特数,或者说,每个位图的长度,例如可以是时延向量集合中包含的时延向量的个数。
当至少两个角度向量对应的时延向量不同时,网络设备可以基于每个角度向量分别指示所对应的一个或多个时延向量。网络设备可以通过K个位图来分别指示与K个角度向量分别对应的一个或多个时延向量。
也就是说,该K个位图可以与K个角度向量(或者说,K个端口)一一对应。每个位图可用于指示与一个角度向量对应的若干个时延向量。与每个角度向量对应的若干个时延向量均可以是从预先定义的时延向量集合中确定。以K个角度向量中的第k个角度向量为例,终端设备可以通过第k个位图来指示第k个角度向量对应的Lk个时延向量。
每个位图可以包括多个比特,每个比特对应于预先定义的时延向量集合中的一个时延向量。当某一比特位指示“0”时,可认为该比特位所对应的时延向量未被选择;当比特位指示“1”时,可认为该比特位所对应的时延向量被选择,或者说,该比特位所对应的时延向量是终端设备向网络设备指示的时延向量,或者,是终端设备向网络设备指示的时延向量中的一个。应理解,这里所列举的指示比特的值所表达的含义仅为示例,不应对本申请构成任何限定。
此外,当至少两个角度向量对应的时延向量不同时,终端设备可以进一步指示各角度向量和时延向量的对应关系。当终端设备通过K个位图向终端设备指示与K个角度向量分别对应的一个或多个时延向量时,可以按照预先定义的顺序依次指示。由于基于K个角度向量预编码得到的预编码参考信号对应于K个端口,终端设备例如可以按照端口号从大到小或从小到大的顺序依次指示该K个角度向量分别对应的K个位图。网络设备可以也按照预先定义的顺序依次确定与每个端口对应的一个或多个时延向量。或者,终端设备可以在指示与K个角度向量分别对应的K个位图时,通过额外的指示比特指示每个位图对应的端口号,以便网络设备确定与每个端口对应的一个或多个时延向量。
当K个角度向量中的任意两个角度向量对应相同的L个时延向量时,终端设备可以对该L个时延向量的指示信息仅生成并指示一次。终端设备可以通过一个位图来指示该L个时延向量。该位图可用于指示时延向量集合中与K个角度向量对应的L个时延向量。
可选地,该第二指示信息包括一个位图,该位图用于指示时延向量集合中与K个角度向量中的第k个角度向量对应的Lk个时延向量。
其中,该位图的长度可以是时延向量集合中包含的时延向量个数的K倍。
该位图也就相当于将上文列举的长度为时延向量集合中时延向量个数的K个位图拼接在一起得到。换句话说,该位图可包括K组指示比特,每组指示比特可用于指示一个角度向量所对应的一个或多个时延向量。
终端设备可以按照预先定义的顺序将该K组指示比特依次排布,以便于终端设备基于预先定义的顺序确定与每个角度向量(或者说,每个端口)对应的一个或多个时延向量。
图4是本申请实施例提供的位图的示意图。图中示出了端口数为2(也就是角度向量数K=2)、时延向量集合包括8个时延向量的一例。终端设备可以通过长度为16比特的位图来指示各角度向量对应的时延向量。如图所示,对于端口#1所对应的角度向量,终端设备选择了时延向量集合中的第1个、第4个和第5个时延向量,对于端口#2所对应的角度向量,网络设备选择了时延向量集合中的第1个、第3个和第8个时延向量。因此,网络设备也可以根据端口号的排列顺序,依次确定与各端口对应的时延向量。
当K个角度向量中的任意两个角度向量对应相同的L个时延向量时,该位图可以演变为上述长度为时延向量集合中时延向量个数的位图。该位图可用于指示时延向量集合中与K个角度向量对应的L个时延向量。
方式二、终端设备可以通过时延向量组合的索引来指示被选择的一个或多个时延向量。
可选地,该第一指示信息包括K个索引,该K个索引中的第k个索引用于指示时延向量集合中的Lk个时延向量。
也就是说,该K个索引可以与K个端口一一对应。每个索引可用于指示一个端口对应的一个或多个时延向量的组合在预先定义的时延向量集合中的位置。例如,网络设备和终端设备可以预先定义时延向量的多种组合与多个索引的一一对应关系,每个索引可用于指示一种时延向量的组合。每种组合可以包括多个时延向量。则第k个索引可以是该Lk个时延向量的组合的索引。
在一种实现方式中,上述预先定义的时延向量的多种组合与多个索引的一一对应关系可以是分别基于不同个数的时延向量的组合定义。如,对于4个时延向量的组合,可预定义多种组合与多个索引的一一对应关系;又如,对8个时延向量的组合,可预定义多种组合与多个索引的一一对应关系。对于不同个数的时延向量的组合,索引可以重复使用。
也就是说,终端设备可以根据待反馈的时延向量及个数确定索引,网络设备可以根据时延向量的个数和索引确定Lk个时延向量。例如,终端设备可以基于待反馈的Lk时延向量及个数Lk,确定该Lk个时延向量的组合在时延向量集合中的索引。由于Lk是由网络设备指示或预定义值,网络设备可以预先知道Lk的值,因此可以基于终端设备所指示的索引,确定Lk个时延向量。
应理解,上文所列举的时延向量的多种组合与多个索引的一一对应关系仅为示例,不应对本申请构成任何限定。例如,对于不同个数的时延向量的组合,索引也不重复。本申请对此不作限定。
此外,当至少两个角度向量对应的时延向量不同时,终端设备可以进一步指示各角度向量和时延向量的对应关系。当终端设备通过K个索引向终端设备指示与K个角度向量分别对应的一个或多个时延向量时,可以按照预先定义的顺序依次指示。由于基于K个角度向量预编码得到的预编码参考信号对应于K个端口,终端设备例如可以按照端口号从大到小或从小到大的顺序依次指示该K个角度向量分别对应的K个索引。网络设备可以也按照预先定义的顺序依次确定与每个端口对应的一个或多个时延向量。或者,终端设备可以在指示与K个角度向量分别对应的K个索引时,通过额外的指示比特指示每个位图对应的端口号,以便网络设备确定与每个端口对应的一个或多个时延向量。
当K个角度向量中的任意两个角度向量对应相同的L个时延向量时,终端设备可以对该L个时延向量的指示信息仅生成并指示一次。终端设备可以通过一个索引来指示该L个时延向量。该索引可以是L个时延向量的组合在时延向量集合中的索引。
方式三、终端设备可以通过时延向量的索引来指示被选择的一个或多个时延向量。
可选地,该第一指示信息包括K组索引,该K组索引中的第k组索引用于指示时延向量集合中的Lk个时延向量。
当至少两个角度向量对应的时延向量不同时,网络设备可以基于每个角度向量分别指示所对应的一个或多个时延向量。网络设备可以通过K组索引来分别指示与K个角度向量分别对应的一个或多个时延向量。每组索引可以包括一个或多个索引,分别用于指示时延向量集合中的一个或多个时延向量。
也就是说,该K组索引可以与K个端口一一对应。每组索引可用于指示一个端口对应的若干个时延向量在预先定义的时延向量集合中的位置。例如,网络设备和终端设备可以预先定义时延向量集合中各时延向量的索引,每个索引对应一个时延向量。则第k组索引可以包括该Lk个时延向量中每个时延向量在时延向量集合中的索引。
当至少两个角度向量对应的时延向量不同时,终端设备可以基于每个角度向量分别指示所对应的一个或多个时延向量。终端设备可以通过K组索引来分别指示与K个角度向量分别对应的一个或多个时延向量。每组索引可以包括一个或多个索引,分别用于指示时延向量集合中的一个或多个时延向量。因此,网络设备也可以按照预先定义的顺序依次确定与每个角度向量对应的一个或多个时延向量。
方式四、网络设备可以通过角度向量对的组合的索引来指示与各角度向量对应的一个或多个时延向量。
由于每个角度向量所对应的一个或多个时延向量均取自同一时延向量集合,终端设备可以按照预先定义的顺序,将K个端口所对应的K个角度向量分别与时延向量集合组合,可以得到角度时延对的集合。应理解,这里所说的将K个角度向量分别与时延向量集合组合可以是逻辑上的组合,并不一定执行了角度向量集合和时延向量集合组合在一起的操作。因此,角度时延对的集合可以是逻辑上的集合,网络设备和终端设备并不一定预先保存了角度时延对的集合。
当终端设备按照预先定义的顺序,将时延向量集合重复使用K次后,可以得到和K个角度向量一一对应K个时延向量集合,该K个时延向量集合是两两相同的,且每个时延向量集合包括多个时延向量。该K个时延向量集合可以与K个角度向量构建K个角度时延对的集合。每个角度时延对的集合可以对应于K个角度向量中的一个角度向量和时延向量集合中的全部时延向量。
在具体实现时,终端设备可以将与K个角度向量中每个角度向量对应的一个或多个时延向量组合在一起,通过第一指示信息来指示该K个角度向量对应的多个时延向量的组合在K个时延向量集合构成的向量集合中的索引。该K个时延向量集合可以是将同一时延向量集合重复使用K次得到。任意两个时延向量集合中包含的时延向量相同,且每个时延向量集合可以包括多个时延向量。可以理解的是,该K个角度向量对应的多个时延向量中,可能有部分时延向量重复出现,但由于重复出现的时延向量用于和不同的角度向量构成不同的角度时延对,因此,该索引也就隐式地指示了多个角度时延对。
例如,当至少两个角度向量对应的时延向量不同时,网络设备可以通过该索引来指示 个时延向量的组合。
个时延向量的组合。
对于K个角度向量中的第k个角度向量,终端设备可以从时延向量集合中确定Lk个时延向量。对于K个角度向量来说,可以认为终端设备从时延向量集合中分别确定了K组时延向量,其中第k组时延向量的个数为Lk。因此,终端设备可以通过将 个时延向量在K个时延向量集合中的组合的索引反馈给网络设备。该索引可用于指示
个时延向量在K个时延向量集合中的组合的索引反馈给网络设备。该索引可用于指示 个时延向量在K个时延向量集合中的位置。并且,该K组时延向量可以按照预先定义的顺序排列,如按照端口号由小到大或由大到小的顺序排布与K个端口分别对应的K组时延向量。因此,该索引可以隐式地指示各端口与时延向量的对应关系。也就相当于指示了各角度向量与时延向量的对应关系,因此也就相当于隐式地指示了多个角度时延对。
个时延向量在K个时延向量集合中的位置。并且,该K组时延向量可以按照预先定义的顺序排列,如按照端口号由小到大或由大到小的顺序排布与K个端口分别对应的K组时延向量。因此,该索引可以隐式地指示各端口与时延向量的对应关系。也就相当于指示了各角度向量与时延向量的对应关系,因此也就相当于隐式地指示了多个角度时延对。
为便于理解,这里结合图4示出的位图来说明。上述索引例如可用于指示图4示出的被选择的6个时延向量在16个时延向量(即,时延向量集合重复使用2次)中的位置。
当K个角度向量中的任意两个角度向量对应相同的L个时延向量时,终端设备可以通过该L个时延向量的组合的索引来指示该L个时延向量在时延向量集合中的位置。此情况下,该索引与上文方式二中所述的索引相同。
应理解,终端设备在向网络设备指示各角度向量对应的一个或多个时延向量时,可以通过隐式或显式的方式指示各角度向量与时延向量的对应关系。上文中列举的各种实现方式中示出了可用于指示各角度向量与时延向量的对应关系的可能的实现方式,但这不应对本申请构成任何限定。本申请对终端设备指示各角度向量与时延向量的对应关系的具体实现方式不作限定。
还应理解,在上述列举的多种方式中,若时延向量集合通过过采样因子扩展为多个子集,终端设备可以从一个子集或多个子集中选择与各角度向量对应的时延向量。此情况下,终端设备还可以通过第一指示信息或者额外的信令进一步指示被选择的时延向量所属的子集。由于网络设备从一个或多个子集中选择与各角度向量对应的时延向量的具体方法可以通过现有技术中的方法来实现,为了简洁,这里省略对该具体过程的详细说明。
还应理解,上文仅为便于理解,示出了可用于指示Lk个时延向量的几种可能的实现方式,但这不应对本申请构成任何限定。本申请对于终端设备指示时延向量的具体方式不作限定。
对于与P个角度时延对对应的P个加权系数,终端设备例如可以通过归一化方式来指示。
例如,终端设备可以从该P个加权系数中确定模最大的加权系数(例如记作最大加权系数),并指示该最大加权系数在P个加权系数中所处的位置。终端设备可进一步指示其余的P-1个加权系数相对于该最大加权系数的相对值。终端设备可以通过各相对值的量化值索引来指示上述P-1个加权系数。例如,网络设备和终端设备可以预先定义多个量化值与多个索引的一一对应关系,终端设备可以基于该一一对应关系,将上述各加权系数相对于最大加权系数的相对值反馈给网络设备。由于终端设备对各加权系数进行了量化,量化值与真实值可能相同或相近,故称为加权系数的量化值。
终端设备在通过第一指示信息指示该P个加权系数时,可以按照预先约定的顺序依次指示。例如,将该P个加权系数按照K个角度向量分为K组,并按照K个角度向量的顺序依次将该K组加权系数排列成一个有序数组。通过该第一指示信息可以指示归一化系数在该有序数组中的位置,并按照除归一化系数之外的各加权系数在该有序数组中的位置,依次指示其余的P-1个加权系数。从而便于网络设备确定与P个角度时延对对应的P个加权系数。
应理解,上文列举的通过归一化方式来指示各加权系数仅为一种可能的实现方式,而不应对本申请构成任何限定。本申请对于终端设备指示加权系数的具体方式不作限定。例如,也可以指示该P个加权系数中每个加权系数的量化值索引。
当终端设备基于K个端口共同确定一个或多个时延向量,或者说,终端设备针对K个角度向量共同确定一个或多个时延向量时,终端设备可以仅指示一次该一个或多个时延向量,或者说,该第一指示信息中可以仅包括一组时延向量的指示信息。例如,终端设备可以仅通过一个位图、一个索引或一组索引来指示这一组时延向量,即,上述可共用的L个时延向量。
由于K个角度向量与K个端口可以一一对应,因此,终端设备基于K个端口共同确定一个或多个时延向量,也可以是指,终端设备针对K个角度向量共同确定一个或多个时延向量。
可选地,该第一指示信息包括位图,该位图用于指示时延向量集合中的L个时延向量。
可选地,该第一指示信息包括L个时延向量的组合在时延向量集合中的索引。
可选地,该第一指示信息包括L个索引,每个索引用于指示L个时延向量中的一个时延向量在时延向量集合中的索引。
应理解,上文列举的用于指示L个时延向量的方法仅为示例,不应对本申请构成任何限定。本申请对于终端设备指示时延向量的具体方法不作限定。
对于Lk个加权系数,终端设备例如可以通过归一化方式来指示。
例如,终端设备可以从该Lk个加权系数中确定模最大的加权系数(例如记作最大加权系数),并指示该最大加权系数在Lk个加权系数中所处的位置。终端设备可进一步指示其余Lk-1个加权系数相对于该最大加权系数的相对值。终端设备可以通过各相对值的量化值索引来指示上述Lk-1个加权系数。例如,网络设备和终端设备可以预先定义多个量化值与多个索引的一一对应关系,终端设备可以基于该一一对应关系,将上述各加权系数相对于最大加权系数的相对值反馈给网络设备。由于终端设备对各加权系数进行了量化,量化值与真实值可能相同或相近,故称为加权系数的量化值。
终端设备在通过第一指示信息指示P个加权系数时,可以按照K个角度向量和L个时延向量构造维度为K×L的矩阵。该矩阵中的第k行第l列的元素可以是与第k个角度向量和第l个时延向量对应的加权系数,也就是由第k个角度向量和第l个时延向量构成的角度时延对的加权系数。网络设备可以基于相同的方式来恢复与P个角度时延对对应的P个加权系数。
当然,终端设备也可以按照L个时延向量和K个角度向量构造维度为L×K的矩阵。矩阵中各元素与角度时延对的对应关系与上文所述相似。该矩阵中的第l行第k列的元素可以是与第l个时延向量和第k个角度向量对应的加权系数,也就是由第l个时延向量和第k个角度向量构成的角度时延对的加权系数。网络设备可以基于相同的方式来恢复与P个角度时延对对应的P个加权系数。
应理解,通过构造矩阵的方式来指示该P个加权系数,以便指示各加权系数与角度向量和时延向量的对应关系,仅为一种可能的实现方式,而不应对本申请构成任何限定。例如,终端设备也可以按照预先约定的顺序依次指示P个加权系数,如,按照先遍历L个时延向量、再遍历K个角度向量的方式,或按照先遍历K个角度向量、再遍历L个时延向量的方式,将P个角度时延对所对应的P个加权系数排列成一个有序数组,以便网络设备确定各加权系数在该有序数组中的位置。网络设备可以基于相同的方式来恢复与P个角度时延对对应的P个加权系数。
还应理解,上文列举的通过归一化方式来指示各加权系数仅为一种可能的实现方式,而不应对本申请构成任何限定。本申请对于终端设备指示加权系数的具体方式不作限定。例如,也可以指示该Lk个加权系数中每个加权系数的量化值索引。
需要说明的是,上文所提及的归一化,可以是以每个接收天线为单位来确定最大加权系数,从而在每个接收天线对应的量化信息的范围内进行归一化。但这不应对本申请构成任何限定。例如,在本实施例中,终端设备也可以以多个接收天线、一个极化方向、多个极化方向或一个端口为单位来确定最大加权系数,从而在多个接收天线、每个极化方向、多个极化方向或一个端口对应的量化信息的范围内进行归一化。
还应理解,该第一指示信息在用于指示P个加权系数时,可通过直接或间接的方式来指示。例如,对于最大加权系数,可以指示其在P个加权系数中的位置;又例如,对于量化值为零的加权系数,也可以指示其在P个加权系数中的位置。换句话说,该第一指示信息并不一定指示了P个加权系数中的每一个系数。只要网络设备可以根据第一指示信息恢复出P个加权系数即可。
还应理解,终端设备在通过第一指示信息指示上述P个加权系数时,例如可以基于K个角度向量中的每个角度向量确定的一个或多个加权系数依次指示。在指示每个角度向量对应的一个或多个加权系数时,可以按照与角度向量对应的一个或多个时延向量在时延向量集合中排布的顺序,依次指示Lk个加权系数。或者,终端设备也可以按照预先定义的顺序来指示Lk个时延向量和Lk个加权系数,只要网络设备能够根据第一指示信息恢复出Lk个时延向量及其对应的Lk个加权系数即可。
还应理解,终端设备在通过第一指示信息指示K组时延向量和K组加权系数时,可以按照预先定义的K个端口的指示顺序,依次指示与每个端口对应的一组时延向量和一组加权系数;或者,也可以按照预先定义的K个端口的顺序,先依次指示K组时延向量,再指示K组加权系数,或,先指示K组加权系数,在指示K组时延向量。只要网络设备能够根据第一指示信息恢复出与K个端口对应的K组时延向量和K组加权系数即可。
需要说明的是,上文中以一个极化方向、一个接收天线为例详细说明了终端设备生成第一指示信息的具体过程。换句话说,上述P个加权系数可以是基于一个极化方向的发射天线发送且在一个接收天线上接收到的预编码参考信号确定的。但这不应对本申请构成任何限定。
当终端设备配置有多个接收天线时,上文举例描述的一个接收天线可以为终端设备配置的多个接收天线中的任意一个。也就是说,终端设备可以基于上文所述的方法,对每个接收天线分别确定时延向量和加权系数。
当网络设备配置有多个极化方向的发射天线时,上文举例描述的一个极化方向可以是多个极化方向中的任意一个极化方向。也就是说,终端设备可以基于上文所述的方法,基于每个极化方向的发射天线发送的预编码参考信号确定时延向量和加权系数。
若极化方向数为1,接收天线数为R,R>1且为整数,该第一指示信息可用于指示与R个接收天线对应的R组时延向量和R组加权系数。其中,每组时延向量可以包括基于K个角度向量确定的一个或多个时延向量,例如,可以是P个(即,各角度向量对应的时延向量互不相同),或,L个(即,K个角度向量共用相同的L个时延向量)。每组加权系数可以包括P个加权系数。
这里,与R个接收天线对应的R组时延向量和R组加权系数,也就是基于R个接收天线中的每个接收天线上接收到的预编码参考信号分别确定的R组时延向量和R组加权系数。
可选地,该第一指示信息包括R组基于接收天线反馈的指示信息,每组基于接收天线反馈的指示信息对应于一个接收天线。每组基于接收天线反馈的指示信息可用于指示与一个接收天线对应的一个或多个时延向量以及与一个接收天线对应的一个或多个加权系数。
对于R个接收天线中的第r(r为1至R中的任意值,且r为整数)个接收天线,终端设备可以基于估计得到的时延向量和加权系数生成第r组基于接收天线反馈的指示信息,该第r组基于接收天线反馈的指示信息可用于指示上述基于第r个接收天线接收到的预编码参考信号确定的时延向量和加权系数。可以理解,由于基于接收天线反馈的指示信息对应于接收天线,该第r组基于接收天线反馈的指示信息可以属于第一指示信息,或者说,该第r组基于接收天线反馈的指示信息可以是第一指示信息中的至少部分信息。当接收天线数为1时,该基于接收天线反馈的指示信息也就是第一指示信息。
可以理解的是,上文中结合图2示出的实施例中,是以一个接收天线为例来说明第一指示信息所包含的信息。当接收天线数为多个时,上述第一指示信息中所包含的信息可能随之翻倍,例如,该第一指示信息中用于指示加权系数的信息翻倍,或者,用于指示时延向量和加权系数的信息都翻倍。
可选地,多个接收天线中,至少两个接收天线对应的时延向量不同。
换句话说,终端设备可以基于每个接收天线上接收到的预编码参考信号分别确定和指示时延向量。因此,终端设备在通过第一指示信息指示R个接收天线对应的时延向量时,可以基于每个接收天线分别指示。具体的指示方式例如可以为上文所列举的位图或索引。
例如,若采用位图来指示每个接收天线对应的时延向量,则该第一指示信息例如可以包括一个位图,该位图用于依次指示基于R个接收天线的每个接收天线、K个角度向量的每个额角度向量反馈的一个或多个时延向量;也可以包括R个位图,每个位图用于指示一个接收天线上K个角度向量共用的一个或多个时延向量;也可以包括R×K个位图,每个位图用于指示针对每个接收天线、每个角度向量反馈的一个或多个时延向量。
可选地,多个接收天线中第一接收天线对应的一个或多个时延向量和第二接收天线对应的一个或多个时延向量相同。
换句话说,多个接收天线也可以共用相同的一个或多个时延向量,例如,L个。该L个时延向量例如可以是基于一个接收天线上接收到的预编码参考信号估计得到的下行信道的估计值确定,也可以是基于多个接收天线上接收到的预编码参考信号估计得到的下行信道的估计值确定。本申请对此不作限定。终端设备基于多个接收天线上接收到的预编码参考信号确定共用的L个时延向量的具体方法与上文中所述的终端设备基于多个端口的预编码参考信号确定共用的L个时延向量的具体方法相似,为了简洁,这里不再赘述。
因此,终端设备通过第一指示信息指示R个接收天线对应的时延向量时,可以仅指示L个时延向量。换句话说,上述R组基于接收天线反馈的指示信息中,用于指示时延向量的信息可以仅生成并指示一次。即,用于指示时延向量的R组信息可以合并为一组。换句话说,该第一指示信息在用于指示时延向量时,可以仅包括一组时延向量的指示信息。例如,仅通过一个位图来指示R个接收天线共用的时延向量,或,仅通过一个索引(如,时延向量的组合的索引或角度时延对的组合的索引)或一组索引(如,包括各时延向量各自的索引)来指示R个接收天线共用的时延向量。
终端设备在通过第一指示信息指示R个接收天线对应的加权系数时,可以基于每个接收天线上接收到的预编码参考信号分别确定和指示一组加权系数。其中,每组加权系数可以包括对应于P个角度时延对的P个加权系数。即,该第一指示信息在用于指示加权系数时,可以包括R×P个加权系数的指示信息。
可选地,该第一指示信息在用于指示与R个接收天线对应的R×P个加权系数时,可以以每个接收天线为单位,对每个接收天线对应的P个加权系数采用归一化方式指示。
终端设备在一个接收天线的量化范围内进行归一化以指示P个加权系数的具体实现方式在上文中已经详细说明,为了简洁,这里不再赘述。
可选地,该第一指示信息在用于指示R个接收天线上的R×P个加权系数时,也可以以多个接收天线为单位,采用归一化方式来指示。
即,可以在多个接收天线对应的R×P个加权系数中确定最大加权系数,指示该最大加权系数的位置。终端设备可进一步确定其余的R×P-1个加权系数相对于该最大加权系数的相对值,通过各相对值的量化值索引来指示上述R×P-1个加权系数。
应理解,终端设备在多个接收天线的量化信息的范围内进行归一化与在一个接收天线的量化信息的范围内进行归一化的具体方法相同,为了简洁,这里不再赘述。
还应理解,终端设备在通过归一化方式指示多个接收天线的加权系数时,可以按照预先约定的顺序依次指示。例如,可以按照预先定义的R个接收天线的指示顺序,依次指示除归一化系数之外的各个加权系数。本申请对于终端设备指示加权系数的顺序不作限定,只要网络设备能够根据第一指示信息恢复出与R个接收天线对应的R×P个加权系数即可。
可选地,多个接收天线中第一接收天线对应的加权系数的个数与第二接收天线对应的加权系数的个数相同。
换句话说,多个接收天线中第一接收天线对应的角度时延对的个数与第二接收天线对应的角度时延对的个数相同。由于对于每个接收天线来说,加权系数的个数可以与角度时延对的个数相同。因此,各接收天线对应的加权系数的个数两两相同,也就是,各接收天线对应的角度时延对的个数两两相同。例如,各接收天线对应的加权系数的个数或者角度时延对的个数可以为上文所列举的P。
可选地,多个接收天线中第一接收天线对应的加权系数的个数与第二接收天线对应的加权系数的个数不同。
换句话说,多个接收天线中第一接收天线对应的角度时延对的个数与第二接收天线对应的角度时延对的个数不同。由于对于每个接收天线来说,加权系数的个数可以与角度时延对的个数相同。因此,各接收天线对应的加权系数的个数互不相同,也就是,各接收天线对应的角度时延对的个数互不相同。例如,对于第r个接收天线,加权系数的个数或者角度时延对的个数可以为Pr,Pr≥1,且为整数。
可以理解的是,无论加权系数的个数为P还是Pr,终端设备均可以基于上文所述的方法确定和指示加权系数。换句话说,Pr可以理解为P的一例。
应理解,终端设备在通过第一指示信息指示与多个接收天线对应的时延向量和加权系数时,可以按照预先定义的多个接收天线的指示顺序,依次指示与每个接收天线对应的K组时延向量和K组加权系数;或者,也可以按照预先定义的多个接收天线的顺序,先依次指示与多个接收天线对应的时延向量,再依次指示与多个接收天线对应的加权系数,或,先依次指示与多个接收天线对应的加权系数,再依次指示与多个接收天线对应的时延向量。只要网络设备能够根据第一指示信息恢复出与多个接收天线对应的时延向量和加权系数即可。
若接收天线数为1,极化方向数为J,J>1且为整数,该第一指示信息可用于指示与J个极化方向对应的J组时延向量和J组加权系数。其中,每组时延向量可以包括基于K个角度向量确定的一个或多个时延向量,例如,可以是P个(即,各角度向量对应的时延向量互不相同),或,L个(即,K个角度向量共用相同的L个时延向量)。每组加权系数可以包括P个加权系数。
这里,与J个极化方向对应的J组时延向量和J组加权系数,也就是基于J个极化方向中的每个极化方向上的发射天线发射的预编码参考信号分别确定的J组时延向量和J组加权系数。
可选地,该第一指示信息包括J组基于极化方向反馈的指示信息,每组基于极化方向反馈的指示信息可对应于一个极化方向。每组基于极化方向反馈的指示信息了用于指示与一个极化方向对应的一个或多个时延向量以及与一个极化方向对应的一个或多个加权系数。
对于J个极化方向中的第j(j为1至J中的任意值,且j为整数)个极化方向,终端设备可以基于估计得到的时延向量和加权系数生成第j组基于极化方向反馈的指示信息,该第j组基于极化方向反馈的指示信息可用于指示上述基于第j个极化方向的发射天线发射的预编码参考信号确定的时延向量和加权系数。可以理解,由于基于极化方向反馈的指示信息对应于极化方向,该第j组基于极化方向反馈的指示信息可以属于上述第一指示信息,或者说,该第j组基于极化方向反馈的指示信息可以是第一指示信息中的至少部分信息。当极化方向数为1时,该基于极化方向反馈的指示信息也就是第一指示信息。
可以理解的是,上文中结合图2示出的实施例中,是以一个极化方向为例来说明第一指示信息所包含的信息。当极化方向数为多个时,上述第一指示信息中所包含的信息可能随之翻倍。例如,该第一指示信息中用于指示加权系数的信息翻倍,或者,用于指示时延向量和加权系数的信息都翻倍。
可选地,多个极化方向中,至少两个极化方向对应的时延向量不同。
换句话说,终端设备可以基于每个极化方向的发射天线发射的预编码参考信号分别确定和指示时延向量。因此,终端设备在通过第一指示信息指示J个极化方向对应的时延向量时,可以基于每个极化方向分别指示。具体的指示方式例如可以为上文所列举的位图或索引。
例如,若采用位图来指示每个极化方向对应的时延向量,则该第一指示信息可以包括J个位图,每个位图用于指示一个接收天线上K个角度向量共用的一个或多个时延向量;也可以包括J×K个位图,每个位图用于指示针对每个极化方向、每个角度向量反馈的一个或多个时延向量。
可选地,多个极化方向中第一极化方向对应的时延向量和第二极化方向对应的时延向量相同。
换句话说,多个极化方向可以共用相同的一个或多个时延向量,例如,L个。该L个时延向量例如可以是基于一个极化方向的发射天线发射的预编码参考信号估计得到的下行信道的估计值确定,也可以是基于多个极化方向的发射天线发射的预编码参考信号估计得到的下行信道的估计值确定。本申请对此不作限定。终端设备基于多个极化方向的发射天线发射的预编码参考信号确定共用的L个时延向量的具体方法与上文中所述的终端设备基于多个端口的预编码参考信号确定共用的L个时延向量的具体方法相似,为了简洁,这里不再赘述。
因此,终端设备通过第一指示信息指示J个极化方向对应的时延向量时,可以仅指示L个时延向量。换句话说,该第一指示信息中用于指示时延向量的信息可以仅生成并指示一次。即,用于指示时延向量的J组指示信息可以合并为一组。换句话说,该第一指示信息在用于指示时延向量时,可以仅包括一组时延向量的指示信息。例如,仅通过一个位图来指示J个极化方向共用的时延向量,或,仅通过一个索引(如,时延向量组合的索引或角度时延对的组合的索引)或一组索引(如,包括各时延向量各自的索引)来指示J个极化方向共用的时延向量。
终端设备在通过第一指示信息指示J个极化方向对应的加权系数时,可以基于每个极化方向、每个端口的预编码参考信号分别确定和指示一组加权系数。其中,每组加权系数可以包括对应于P个角度时延对的P个加权系数。即,该第一指示信息在用于指示加权系数时,可以包括J×P个加权系数的指示信息。
可选地,该第一指示信息在用于指示与J个极化方向对应的J×P个加权系数时,可以以每个极化方向为单位,对每个极化方向对应的P个加权系数采用归一化方式指示。
终端设备在一个极化方向的量化范围内进行归一化以指示P个加权系数的具体实现方式与上文所述的在一个接收天线的量化范围内进行归一化的具体实现方式相同,为了简介,这里省略对该具体实现方式的详细说明。
可选地,该第一指示信息在用于指示J个极化方向上的J×P个加权系数时,也可以以J个极化方向为单位,采用归一化方式来指示。
即,可以在多个极化方向对应的J×P个加权系数中确定最大加权系数,指示该最大加权系数的位置。终端设备可进一步确定其余的J×P-1个加权系数相对于该最大加权系数的相对值,通过各相对值的量化值索引来指示上述J×P-1个加权系数。
应理解,终端设备在多个极化方向的量化信息的范围内进行归一化与在一个极化方向的量化信息的范围内进行归一化的具体方法相同,为了简洁,这里不再赘述。
还应理解,终端设备在通过归一化方式指示多个极化方向的加权系数时,可以按照预先约定的顺序依次指示。例如,可以按照预先定义的J个极化方向的指示顺序,依次指示除归一化系数之外的各个加权系数。本申请对于终端设备指示加权系数的顺序不作限定,只要网络设备能够根据第一指示信息恢复出与J个极化方向对应的J×P个加权系数即可。
若接收天线数为R,极化方向数为J,该第一指示信息可用于指示与J个极化方向、R个接收天线对应的J×R组时延向量和J×R组加权系数。其中,每组时延向量可以包括一个极化方向的发射天线发射且在一个接收天线上接收到的K个端口的预编码参考信号确定的一个或多个时延向量,例如,可以是P个(即,各角度向量对应的时延向量互不相同),或,L个(即,K个角度向量共用相同的L个时延向量)。每组加权系数可以包括P个加权系数。
与一个极化方向、一个接收天线对应的时延向量,可以是指,基于一个极化方向的发射天线发送并在一个接收天线上接收到的预编码参考信号确定的时延向量。
在接收天线数为R,极化方向数为J的情况下,该第一指示信息中用于指示时延向量的指示信息可以是分别与J个极化方向和R个接收天线对应的J×R组指示信息,每组指示信息可用于指示与一个极化方向和一个接收天线对应的一个或多个时延向量,至少两个极化方向对应的时延向量可以不同,且至少两个接收天线所对应的时延向量也可以不同;该第一指示信息中用于指示时延向量的指示信息也可以是与J个极化方向对应的J组指示信息,每组指示信息可用于指示与一个极化方向对应的一个或多个时延向量,至少两个极化方向对应的时延向量可以不同,各接收天线可以共用相同的一个或多个时延向量;该第一指示信息中用于指示时延向量的指示信息也可以是R个接收天线对应的一个或多个时延向量,每组指示信息可用于指示与一个接收天线对应的一个或多个时延向量,至少两个接收天线对应的时延向量可以不同,各极化方向可以共用相同的一个或多个时延向量;该第一指示信息中用于指示时延向量的指示信息也可以是R个接收天线和J个极化方向对应的一个或多个时延向量,各极化方向、各接收天线可以共用相同的一个或多个时延向量。
上文已经详细说明了第一指示信息在分别用于指示与极化方向对应的时延向量和与接收天线对应的时延向量的具体方式,为了简洁,这里不再赘述。
可选地,该第一指示信息在用于指示J个极化方向、R个接收天线对应的J×R×P个加权系数,可以以J个极化方向、R个接收天线为单位,采用归一化方式来指示;也可以以一个极化方向、R个接收天线为单位,采用归一化方式来指示;还可以以J个极化方向、一个接收天线为单位,采用归一化方式来指示。本申请对此不作限定。
应理解,终端设备采用归一化方式指示多个加权系数的具体方法在上文中已经做了详细说明,为了简洁,这里不再赘述。
还应理解,终端设备在通过归一化方式指示多个极化方向、多个接收天线的加权系数时,可以按照预先约定的顺序依次指示。例如,可以按照预先定义的J个极化方向、R个接收天线的指示顺序依次指示除归一化系数之外的各个加权系数。本申请对于终端设备指示加权系数的顺序不作限定。只要网络设备能够根据第一指示信息恢复出与J个极化方向、R个接收天线的J×R×P个加权系数即可。
还应理解,通过归一化方式来指示加权系数仅为一种可能的实现方式,而不应对本申请构成任何限定。本申请对于第一指示信息指示加权系数的具体方式不作限定。
在基于接收天线反馈加权系数的情况下,终端设备还可以进一步指示接收天线数。可选地,该方法200还包括:终端设备发送第八指示信息,该第八指示信息用于指示接收天线数。相应地,网络设备接收该第八指示信息。
该第八指示信息和上述第一指示信息可以承载在同一个信令中发送,如PMI或CSI;也可以通过不同的信令发送,本申请对此不作限定。
应理解,终端设备的接收天线数也可以预先定义,如协议定义。此情况下,终端设备可以不通过额外的信令指示接收天线数。
事实上,终端设备反馈下行信道的测量结果并不限于基于每个接收天线来反馈,终端设备也可以基于传输层来反馈下行信道的测量结果。
其中,传输层数可以为一个或多个,本申请对此不作限定。
在传输层数大于1的情况下,各传输层可以共用相同的一个或多个时延向量。例如,各传输层、各极化方向可以共用相同的L个时延向量,或者,各极化方向对应的时延向量彼此各不相同,J个极化方向对应的时延向量为J×L个,各传输层可以共用相同的J×L个时延向量。终端设备基于上文所述的方法,通过第一指示信息指示一个或多个时延向量。
终端设备还可以基于上文所述的方法确定每个极化方向、每个接收天线对应的加权系数之后,可以进一步对该加权系数进行处理,以得到基于每个传输层反馈的加权系数。
仍以极化方向数为J、接收天线数为R为例,终端设备可以基于与J个极化方向、R个接收天线对应的J×R×P个加权系数构造系数矩阵。该系数矩阵可以是J×P行R列的矩阵,每一列的元素可以是一个接收天线对应的J×P加权系数。
下文示出了系数矩阵的一例:

其中,极化方向数J=2。该系数矩阵中的第一行至第P行可以由对应于一个极化方向的加权系数构成,αp,r可以表示第一极化方向上第p个角度时延对、第r个接收天线对应的加权系数。该系数矩阵中的第P+1行至第2P行可以由对应于另一个极化方向的加权系数构成,αP+p,r可以表示第二极化方向上第p个角度时延对、第r个接收天线对应的加权系数。其中,p=1,2,……,P;r=1,2,……,R。
终端设备可以对该系数矩阵进行奇异值分解(singular value decomposition,SVD)以得到基于传输层反馈的加权系数。
假设传输层数为Z,基于传输层反馈的加权系数可以包括Z×P个加权系数。
终端设备可以采用归一化方式指示上述Z×P个加权系数。例如,终端设备可以以一个传输层为单位,采用归一化方式来分别指示与各传输层对应的P个加权系数;终端设备也可以以Z个传输层为单位,采用归一化方式来指示与Z个传输层对应的Z×P个加权系数。
应理解,终端设备采用归一化方式指示多个加权系数的具体方法在上文中已经做了详细说明,为了简洁,这里不再赘述。
还应理解,通过归一化方式来指示加权系数仅为一种可能的实现方式,而不应对本申请构成任何限定。本申请对于第一指示信息指示加权系数的具体方式不作限定。
在基于传输层反馈加权系数的情况下,终端设备还可进一步指示传输层数。可选地,该方法200还包括:终端设备发送第九指示信息,该第九指示信息用于指示传输层数。相应地,网络设备接收该第九指示信息。
可选地,该第九指示信息为秩指示(rank indicator,RI)。
应理解,RI仅为第九指示信息的一例,不应对本申请构成任何限定。本申请对于第九指示信息的具体形式不作限定。
还应理解,该第九指示信息和上述第一指示信息可以承载在同一个信令中发送,如CSI;也可以通过不同的信令发送,本申请对此不作限定。
还应理解,上文列举的通过构造系数矩阵并对系数矩阵进行SVD确定各传输层对应的加权系数的方法仅为示例,不应对本申请构成任何限定。本申请对于确定各传输层的加权系数的具体方法不作限定。
在步骤230中,终端设备发送该第一指示信息。相应地,网络设备接收该第一指示信息。
具体地,该第一指示信息例如可以是CSI,也可以是CSI中的部分信元,还可以是其他信息。本申请对此不作限定。该第一指示信息可以携带在现有技术中的一个或者多个消息中由终端设备发送给网络设备,也可以携带在新设计的一个或者多个消息中由终端设备发送给网络设备。终端设备例如可以通过物理上行资源,如物理上行共享信道(physicaluplink share channel,PUSCH)或物理上行控制信道(physical uplink controlchannel,PUCCH),向网络设备发送该第一指示信息,以便于网络设备基于该第一指示信息确定预编码矩阵。
终端设备通过物理上行资源向网络设备发送第一指示信息的具体方法可以与现有技术相同,为了简洁,这里省略对其具体过程的详细说明。
在步骤240中,网络设备根据第一指示信息确定预编码矩阵。
如前所述,终端设备可以基于接收天线反馈时延向量和加权系数,也可以基于传输层反馈时延向量和加权系数。网络设备可基于不同的反馈粒度,根据第一指示信息确定预编码矩阵。
若终端设备基于接收天线反馈时延向量和加权系数,则该第一指示信息所指示的时延向量可以包括一个或多个接收天线对应的时延向量,该第一指示信息所指示的加权系数可以包括一个或多个接收天线对应的加权系数。网络设备可以基于每个接收天线所对应的时延向量和加权系数,以及网络设备预先基于上行信道测量确定的K个角度向量,确定每个接收天线上的角度时延对,重构与各RB对应的下行信道,进而确定与各RB对应的预编码矩阵。
这里,与RB对应的下行信道,可以是指,基于该RB上接收到的预编码参考信号确定的下行信道,可用于确定与该RB对应的预编码矩阵。与RB对应的预编码矩阵,可以是指,基于该RB对应的信道矩阵确定的预编码矩阵,或者说,基于该RB上接收到的预编码参考信号确定的预编码矩阵,可用于对通过该RB传输的数据做预编码。
具体地,由于每个接收天线对应的P个加权系数可以分别与P个角度时延对一一对应。网络设备可以基于每个接收天线对应的P个加权系数和一个或多个时延向量,以及K个角度向量,确定P个角度时延对以及各角度时延对的加权系数,进而构造与各接收天线对应的空频矩阵。
在本实施例中,与第r个接收天线对应的空频矩阵可以通过与第r个接收天线对应的P个角度时延对和与第r个接收天线对应的P个加权系数确定。其中,P个角度时延对可用于构造P个空频分量矩阵。如前所述,由K个角度向量中的第k个角度向量a(θk)及其对应的Lk个时延向量中的第lk个时延向量 可以构造空频分量矩阵
可以构造空频分量矩阵 与第r个接收天线对应的空频矩阵
与第r个接收天线对应的空频矩阵 可以是上述P个空频分量矩阵的加权和。即,
可以是上述P个空频分量矩阵的加权和。即,
 表示基于第r个接收天线反馈的由第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数。该空频矩阵的维度可以是T×N。
表示基于第r个接收天线反馈的由第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数。该空频矩阵的维度可以是T×N。
需要说明的是,上文为方便理解,以发射天线的一个极化方向为例来说明了确定与接收天线对应的空频矩阵的具体过程。但这不应对本申请构成任何限定。当发射天线的极化方向数大于1时,网络设备仍然可以基于如上所述的方法来确定与各接收天线对应的空频矩阵。
例如,极化方向数为2,与第r个接收天线对应的空频矩阵可以通过如下计算式确定:

其中, 表示基于第r个接收天线反馈的第一极化方向上由第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数;
表示基于第r个接收天线反馈的第一极化方向上由第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数; 表示基于第r个接收天线反馈的第二极化方向上由第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数。
表示基于第r个接收天线反馈的第二极化方向上由第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数。
可以理解的是,当K个角度向量中的任意两个角度向量对应相同的L个时延向量时,上述计算式中的下角标lk和Lk中的k可以省略。即,分别为 以及
以及
应理解,上文对于2个极化方向定义的空频矩阵 的计算式仅为示例,不应对本申请构成任何限定。例如,在不同的极化方向上加载的时延向量和/或角度向量的数量可以相同也可以不同,在不同的极化方向上加载是时延向量和/或角度向量可以相同,也可以不同。
的计算式仅为示例,不应对本申请构成任何限定。例如,在不同的极化方向上加载的时延向量和/或角度向量的数量可以相同也可以不同,在不同的极化方向上加载是时延向量和/或角度向量可以相同,也可以不同。
对于R个接收天线而言,网络设备可以分别基于每个接收天线对应的P个加权系数确定空频矩阵 至
至 由此,网络设备可确定与各RB对应的下行信道矩阵。
由此,网络设备可确定与各RB对应的下行信道矩阵。
以N个RB中的第n个RB为例,网络设备可以确定与第n个RB对应的下行信道矩阵的转置(V(n))T。其中,矩阵(V(n))T可以是由上述基于R个接收天线分别确定的R个空频矩阵 至
至 中每个空频矩阵中的第n个列向量确定。例如,将
中每个空频矩阵中的第n个列向量确定。例如,将 中的第n列作为矩阵(V(n))T的第1列,将
中的第n列作为矩阵(V(n))T的第1列,将 中的第n列作为矩阵(V(n))T的第2列;以此类推,可以将
中的第n列作为矩阵(V(n))T的第2列;以此类推,可以将 中的第n列作为矩阵(V(n))T的第r列。由此可以得到矩阵(V(n))T,进而可以确定与第n个RB对应的下行信道矩阵V(n)。
中的第n列作为矩阵(V(n))T的第r列。由此可以得到矩阵(V(n))T,进而可以确定与第n个RB对应的下行信道矩阵V(n)。
基于上述方法可以确定与各RB分别对应的下行信道矩阵。
网络设备可以进一步根据下行信道矩阵确定预编码矩阵。例如,网络设备可以通过对下行信道矩阵或信道矩阵的协方差矩阵进行SVD的方式确定预编码矩阵,或者,也可以通过对下行信道矩阵的协方差矩阵进行特征值分解(eigenvalue decomposition,EVD)的方式确定。
应理解,网络设备根据信道矩阵确定预编码矩阵的具体方式可以参考现有技术,本申请对于预编码矩阵的确定方式不作限定。
还应理解,上文中仅为便于理解,示出了网络设备基于空频矩阵确定下行信道矩阵,进而确定预编码矩阵的具体过程。但这不应对本申请构成任何限定。网络设备也可以根据空频矩阵直接确定预编码矩阵。例如,基于空频矩阵可以确定得到矩阵V(n),网络设备可以通过对V(n)进行SVD,然后取右特征向量的方式确定预编码矩阵;又例如,网络设备可以通过直接对(V(n))T进行SVD,然后取左特征向量的共轭的方式确定预编码矩阵。
若终端设备基于传输层反馈时延向量和加权系数,则该第一指示信息所指示的时延向量可以是多个传输层共用的至少一个时延向量,该第一指示信息所指示的加权系数可以包括一个或多个传输层的加权系数。网络设备可以基于该至少一个时延向量,以及基于上行信道测量确定的K个角度向量,确定P个角度时延对。网络设备可以基于每个传输层对应的加权系数,以及上述P个角度时延对,确定与各传输层对应的空频矩阵,进而确定与各RB对应的预编码矩阵。
具体地,由于基于每个传输层反馈的P个加权系数可以分别与P个角度时延对一一对应。网络设备可以基于每个传输层对应的P个加权系数,以及P个角度时延对中每个角度时延对中包含的角度向量和时延向量,构造与传输层对应的空频矩阵。
在本实施例中,与第z个传输层对应的空频矩阵 可以通过P个角度时延对和与第z个传输层对应的P个加权系数确定。其中,P个角度时延对可用于构造P个空频分量矩阵。如前所述,由K个角度向量中的第k个角度向量a(θk)及其对应的Lk个时延向量中的第lk个时延向量
可以通过P个角度时延对和与第z个传输层对应的P个加权系数确定。其中,P个角度时延对可用于构造P个空频分量矩阵。如前所述,由K个角度向量中的第k个角度向量a(θk)及其对应的Lk个时延向量中的第lk个时延向量 可以构造空频矩阵a(θk)×b(τl)H。与第z个传输层对应的空频矩阵可以是P个空频分量矩阵的加权和。即,
可以构造空频矩阵a(θk)×b(τl)H。与第z个传输层对应的空频矩阵可以是P个空频分量矩阵的加权和。即,
 表示基于第z个传输层反馈的由第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数。该空频矩阵的维度可以是T×N。
表示基于第z个传输层反馈的由第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数。该空频矩阵的维度可以是T×N。
需要说明的是,上文为方便理解,以发射天线的一个极化方向为例来说明了确定与接收天线对应的空频矩阵的具体过程。但这不应对本申请构成任何限定。当发射天线的极化方向数大于1时,网络设备仍然可以基于如上所述的方法来确定与各接收天线对应的空频矩阵。
例如,极化方向数为2,与第r个接收天线对应的空频矩阵可以通过如下计算式确定:

其中, 表示基于第z个传输层反馈的第一极化方向上由第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数;
表示基于第z个传输层反馈的第一极化方向上由第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数; 表示基于第z个传输层反馈的第二极化方向上与第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数。
表示基于第z个传输层反馈的第二极化方向上与第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数。
可以理解的是,当K个角度向量中的任意两个角度向量对应相同的L个时延向量时,上述计算式中的下角标lk和Lk中的k可以省略。即,分别为 以及
以及
应理解,上文对于2个极化方向定义的空频矩阵 的计算式仅为示例,不应对本申请构成任何限定。例如,在不同的极化方向上加载的时延向量和/或角度向量的数量可以相同也可以不同,在不同的极化方向上加载是时延向量和/或角度向量可以相同,也可以不同。
的计算式仅为示例,不应对本申请构成任何限定。例如,在不同的极化方向上加载的时延向量和/或角度向量的数量可以相同也可以不同,在不同的极化方向上加载是时延向量和/或角度向量可以相同,也可以不同。
对于Z个传输层而言,网络设备可以分别基于每个传输层对应的P个加权系数确定与各传输层对应的空频矩阵 至
至 由此,网络设备可确定与各RB对应的预编码矩阵W(n)。
由此,网络设备可确定与各RB对应的预编码矩阵W(n)。
以N个RB中的第n个RB为例,网络设备可以首先确定与第n个RB对应的预编码矩阵W(n)的共轭(W(n))*。可以是由上述基于Z个传输层分别确定的Z个空频矩阵
 至
至 中每个空频矩阵中的第n个列向量构建。例如,将
中每个空频矩阵中的第n个列向量构建。例如,将 中的第n列作为下行信道矩阵(W(n))*的第一列,将
中的第n列作为下行信道矩阵(W(n))*的第一列,将 中的第n列作为下行信道矩阵(W(n))*的第二列;以此类推,可以将
中的第n列作为下行信道矩阵(W(n))*的第二列;以此类推,可以将 中的第n列作为下行信道矩阵(W(n))*的第z列。由此可以得到矩阵(W(n))*,进而可以确定与第n个RB对应的预编码矩阵W(n)。
中的第n列作为下行信道矩阵(W(n))*的第z列。由此可以得到矩阵(W(n))*,进而可以确定与第n个RB对应的预编码矩阵W(n)。
基于上述方法可以确定与各RB分别对应的预编码矩阵。
应理解,上文仅为便于理解,以空频分量矩阵为例详细说明了网络设备确定预编码矩阵的具体过程。但这不应对本申请构成任何限定。网络设备也可以基于P个角度时延对确定P个空频分量向量,进而确定预编码矩阵。本领域的技术人员,基于P个角度时延对可以构造不同形式的P个空频基本单位,进而确定预编码矩阵。基于P个角度时延对而构造的不同形式的P个空频基本单位,进而基于P个空频基本单位的加权和来确定预编码矩阵的方式均应落入本申请要求的保护范围内。
还应理解,上文仅为示例,示出了网络设备根据第一指示信息确定预编码矩阵的可能实现方式,但这不应对本申请构成任何限定。本申请对于网络设备根据第一指示信息确定预编码矩阵的具体实现方式不作限定。本领域的技术人员基于相同的构思,对上文列举的矩阵运算进行变换或者等价的替换,确定预编码矩阵的方法均应落入本申请的保护范围内。
还应理解,上文中确定的预编码矩阵是与RB对应的预编码矩阵。这里,RB为频域单元的一例。与RB对应的预编码矩阵,可以是指,以RB为粒度基于该RB对应的信道矩阵确定的预编码矩阵,或者说,基于该RB上接收到的预编码参考信号确定的预编码矩阵,可用于对通过该RB传输的数据做预编码。与RB对应的下行信道,可以是指,基于该RB上接收到的预编码参考信号确定的下行信道,可用于确定与该RB对应的预编码矩阵。
当频域单元的粒度较大,如频域单元为子带、PRG或者PRB时,网络设备可以根据每个频域单元中各RB对应的预编码矩阵确定与频域单元的预编码矩阵。
若每个频域单元包括一个用于承载参考信号的RB,则网络设备可以将该RB对应的预编码矩阵作为所属的频域单元对应的预编码矩阵。若每个频域单元包括多个用于承载参考信号的RB,则网络设备例如可以将同一个频域单元中与多个RB对应的预编码矩阵的相关矩阵求平均后进行SVD以确定该频域单元对应的预编码矩阵;网络设备又例如可以将同一个频域单元中与多个RB对应的预编码矩阵的平均作为该频域单元对应的预编码矩阵,等等。
应理解,网络设备根据频域单元中多个RB对应的预编码矩阵确定该频域单元的预编码矩阵的具体方法可以参考技术,而不限于上文所列举。本申请对于网络设备频域单元中多个RB对应的预编码矩阵确定该频域单元的预编码矩阵的具体方法不作限定。
还应理解,还应理解,上文中在描述时提及的与某一角度向量和某一时延向量对应的加权系数,也就是,与某一角度向量和某一时延向量构成的角度时延对对应的加权系数。例如,与第k个角度向量和第l个时延向量对应的加权系数,也就是,与第k个角度向量和第l个时延向量构成的角度时延对对应的加权系数。为了简洁,这里不再一一举例说明。
在本申请实施例中,网络设备基于上行信道测量所确定的角度,对下行参考信号进行预编码,使得终端设备根据预编码后的参考信号进行下行信道测量。由于网络设备基于上下行信道可互易的角度对参考信号进行了预编码,终端设备可以不必反馈空域的向量(如上述角度向量),仅反馈频域的向量(如上述时延向量)以及各角度时延对的加权系数。可以大大减小终端设备的反馈开销。此外,通过利用上下行信道的互易性,将终端设备对下行信道的测量过程简化,降低了终端设备在信道测量过程中的计算复杂度。并且,通过对下行参考信号进行空域预编码,可以减小参考信号的端口数,从而可以降低导频开销。
应理解,本申请实施例中仅为便于理解,示出了空频矩阵由真实的信道的转置得到的情况下,下行信道测量并确定预编码矩阵的具体过程。但这不应对本申请构成任何限定。真实的信道与空频矩阵HDL的关系并不是固定不变的。对空频矩阵以及空频分量矩阵的不同定义,可能会使得真实的信道与空频矩阵HDL之间的关系发生变化。例如,空频矩阵HDL可以由真实的信道的转置得到,也可以由真实的信道的共轭转置得到。
当对空频矩阵与信道矩阵间的关系的定义不同时,在加载时延和角度时网络设备所执行的操作也有所不同,终端设备在进行信道测量并反馈时所执行的操作也相应地发生变化。但这只是终端设备和网络设备的实现行为,不应对本申请构成任何限定。本申请对于信道矩阵的定义、空频矩阵的维度及其定义以及二者间的转换关系不作限定。同理,本申请对于空频矩阵与预编码矩阵间的转换关系也不作限定。
上文方法实施例中,以基于角度向量对参考信号进行预编码为例,详细说明了本申请提供的信道测量方法。但这不应对本申请构成任何限定。网络设备也可以仅基于时延向量对参考信号进行预编码,以便于终端设备基于预编码参考信号进行下行信道测量。
为便于理解本申请实施例,下文实施例首先以发射天线的一个极化方向为例详细说明本申请实施例提供的信道测量方法400。应理解,该极化方向可以是发射天线的一个或多个极化方向中的任意一个极化方向。换句话说,一个或多个极化方向中的任意一个极化方向都可以基于本申请实施例提供的方法400进行信道测量。还应理解,本申请对于发射天线的极化方向数并不做限定,例如可以为一个,即,单极化方向;也可以为多个,如,双极化方向。
图5是从设备交互的角度示出的本申请实施例提供的信道测量方法500的示意性流程图。如图所示,该方法500可以包括步骤510至步骤540。下面详细说明方法500中的各步骤。
在步骤510中,终端设备接收预编码参考信号,该预编码参考信号是基于L个时延向量对参考信号预编码得到。相应地,网络设备发送预编码参考信号。其中,L≥1,且L为整数。
在本实施例中,网络设备可以基于L个时延向量对参考信号进行预编码。由于该参考信号未经过空域预编码,基于一个时延向量预编码后得到的预编码参考信号可以与T个发射天线端口中的至少部分发射天线端口对应。其中,T为一个极化方向上的发射天线端口数,T≥1,且T为整数。
在一种可能的实现方式中,网络设备可以遍历L个时延向量,基于L个时延向量中的每个时延向量,对承载于每个RB的参考信号进行预编码,并通过T个发射天线端口发送预编码后的参考信号。通过遍历L个时延向量和T个发射天线端口,可以得到T×L种不同的组合,或者说,T×L个天线时延对。由于未涉及空域预编码,每种组合可对应一个时延向量。换句话说,通过将L个时延向量加载在不同发射天线端口的参考信号上,可以得到时延向量与发射天线端口的不同组合共T×L种。
在另一种可能的实现方式中,网络设备可以基于L个时延向量对承载于测量带宽中每个RB的参考信号进行预编码,并通过T个发射天线端口发送预编码后的参考信号。基于不同的时延向量预编码得到的预编码参考信号可以被映射至不同的RB上。即,至少有两个RB承载的预编码参考信号对应的时延向量不同。换句话说,通过将L个时延向量加载在不同发射天线端口的参考信号上,可以得到时延向量与发射天线端口的不同组合共T×L’种,1≤L’<L,L’为整数。
由于时延具有上下行信道互易性,该L个时延向量均可以是基于上行信道测量确定。由于在上文方法200中已经详细说明了网络设备基于上行信道测量确定L个较强的时延的具体方法,为了简洁,这里不再赘述。
由于在FDD模式下,上下行信道的时延可互易,则可以将上行信道测量所得的L个时延向量加载至下行参考信号,以便终端设备基于接收到的预编码参考信号进行下行信道测量。
网络设备可以基于该L个时延向量对下行参考信号,如CSI-RS,进行预编码,以得到预编码参考信号。网络设备还可以通过预先配置的参考信号资源传输该预编码参考信号。
可选地,该方法500还包括:终端设备接收第五指示信息,该第五指示信息用于配置一个或多个参考信号资源。相应地,网络设备发送该第五指示信息。
该第五指示信息所配置的一个或多个参考信号资源可用于承载预编码参考信号。其中,同一参考信号资源上承载的预编码参考信号可对应一个或多个端口。在第五指示信息配置多个参考信号资源的情况下,各参考信号资源上承载的预编码参考信号对应的时延向量和/或发射天线端口可以是互不相同的,且各参考信号资源在频域和/或时域上互不重叠。在本实施例中,每个端口的预编码参考信号对应于一个发射天线端口和一个时延向量。
由于上文中已经对该第五指示信息做了详细说明,为了简洁,这里不再赘述。
在一种实现方式中,网络设备可以遍历L个时延向量中的每个时延向量对每个发射天线端口上的参考信号进行预编码,以得到预编码参考信号。用于传输该预编码参考信号的参考信号资源可以由网络设备预先通过高层信令配置,如上述第五指示信息。该参考信号资源可以包括一个或多个RB,如N个。每个RB上承载的预编码参考信号都是基于相同的L个时延向量进行预编码得到。
在这种实现方式中,网络设备可以预先为终端设备配置一个参考信号资源。该参考信号资源中的每个RB上承载的预编码参考信号可以对应P(即T×L)个端口。每个端口的预编码参考信号可以是基于L个时延向量中的一个时延向量,对T个发射天线端口上的一个天线端口的参考信号进行预编码得到。
此外,由于将L个时延向量加载到参考信号资源中的每个RB上,每个RB对应的端口数较大,可能带来较大的导频开销。因此,网络设备可以通过高层信令,如上述第五指示信息,配置较小的导频密度,以减小导频开销。
由于上文中已经结合图3详细说明了对RB不分组的情况下,参考信号资源的每个RB上承载的预编码参考信号与端口的对应关系。本实施例中每个RB上承载的预编码参考信号与端口的对应关系与之相似,只是将上文实施例中的角度向量替换为了发射天线端口。为了简洁,这里不再结合附图一一详细说明。
如果每个RB上的预编码参考信号均是遍历L个时延向量预编码得到,则在RB数较多的情况下,会带来较大的导频开销。为了节省导频开销,可以将RB做分组,每个频域组中承载的预编码参考信号可以是基于角度向量和时延向量的P种组合中的部分组合,例如一个时延向量及其对应的角度向量,或者,一个角度向量及其对应的时延向量,或者,一个时延向量和一个角度向量,预编码得到。由此可以大大降低导频开销。
在另一种可能的实现方式中,网络设备可以基于L个时延向量对参考信号进行预编码。基于不同的时延向量预编码所得到的预编码参考信号可以被映射至不同的RB上。每个RB上承载的预编码参考信号可以是基于L个时延向量中的部分时延向量预编码得到。在多个RB中,至少有两个RB承载的预编码参考信号是基于不同的时延向量预编码得到。
在这种实现方式中,用于传输预编码参考信号的参考信号资源可以为多个。网络设备可以预先通过高层信令,如上述第五指示信息,为终端设备配置多个参考信号资源。该多个参考信号资源中的每个参考信号资源可以包括一个或多个RB。每个参考信号资源中承载的预编码参考信号可对应一个或多个端口,且各参考信号资源承载的预编码参考信号对应的时延向量和/或发射天线端口不同。每个端口的预编码参考信号均可以是基于L个时延向量中的一个时延向量对一个发射天线端口的参考信号进行预编码得到。此外,各参考信号资源在频域上和/或时域上互不重叠。例如,各参考信号资源在频域上交错排布。因此,基于不同的时延向量预编码得到的预编码参考信号可以通过不同的时频资源承载。
在这种实现方式中,每个RB上承载的预编码参考信号可以对应的端口数可能小于P。例如,每个RB上加载一个时延向量,则每个RB上承载的预编码参考信号可以对应T个端口,且至少有两个RB承载的预编码参考信号对应不同的时延向量。当两个RB承载的预编码参考信号对应不同的时延向量时,该两个RB承载的预编码参考信号对应的端口号可以相同,也可以不同,本申请对此不作限定。
网络设备可以对多个RB分组,并基于不同的频域组来进行频域预编码。具体地,N个RB可以被划分为多个频域组,如M个频域组,M>1且为整数。每个频域组中可以包括 个RB。如果N不能被M整除,则最后一个频域组中的RB数可以是剩余的RB数。即,第M个频域组中包含的RB数可能小于
个RB。如果N不能被M整除,则最后一个频域组中的RB数可以是剩余的RB数。即,第M个频域组中包含的RB数可能小于 个。
个。
在对RB做分组的情况下,每个频域组中承载的预编码参考信号可以是基于L个时延向量中的部分时延向量预编码得到。
可选地,M=L。即,频域组数可以等于时延向量的个数。则每个频域组中可以包括 个RB。该L个频域组中的第l个频域组所包含的RB可以是N个RB中的第l个、第l+L个、第l+2L个直至第
个RB。该L个频域组中的第l个频域组所包含的RB可以是N个RB中的第l个、第l+L个、第l+2L个直至第 个。换句话说,该L个频域组中的第l个频域组包括N个RB中的第l+(i-1)×L个RB,
个。换句话说,该L个频域组中的第l个频域组包括N个RB中的第l+(i-1)×L个RB,
其中,N个RB中的第l个RB可以是第l个频域组中的第1个RB,N个RB中的第l+L个RB可以是第l个频域组中的第2个RB,N个RB中的第l+2L个RB可以是第l个频域组中的第3个RB,N个RB中的第个RB可以是第l个频域组中的第 个RB。以此类推,N个RB中的第l+(n-1)×L个RB可以是第l个频域组中的第n个RB。
个RB。以此类推,N个RB中的第l+(n-1)×L个RB可以是第l个频域组中的第n个RB。
网络设备可以基于L个时延向量中的第l个时延向量对该L个频域组中的第l个频域组中各RB承载的参考信号进行频域预编码。每个频域组可对应于一个时延向量,且每个频域组中的RB可对应于时延向量中的一个元素。
此时,每个RB上承载的预编码参考信号对应的端口数可以是T。该T个端口具体可以对应于T个发射天线端口。
图6示出了多个RB上承载多个端口的预编码参考信号的另一例。图中示出了RB数为16的一例。
图6示出的16个RB中,每个RB上承载的预编码参考信号可以基于一个时延向量预编码得到。该16个RB可以分为4个频域组。RB#1、RB#5、RB#9和RB#13可以归为频域组#1,RB#2、RB#6、RB#10和RB#14可以归为频域组#2,RB#3、RB#7、RB#11和RB#15可以归为频域组#3,RB#4、RB#8、RB#12和RB#16可以归为频域组#4。
该16个RB可以分别属于四个参考信号资源。每个频域组可以是一个参考信号资源。该四个频域组可以是上述多个参考信号资源的一例。同一个频域组承载的预编码参考信号可以是基于同一个时延向量预编码得到。例如,L=4,L个时延向量例如可以包括b(τ1),b(τ2),b(τ3)和b(τ4)。每个频域组承载的预编码参考信号可以是基于一个时延向量预编码得到。即,上文所示的L’=1。则RB#1、RB#5、RB#9和RB#13上承载的预编码参考信号可以基于同一个时延向量预编码得到,如时延向量b(τ1);RB#2、RB#6、RB#10和RB#14上承载的预编码参考信号可以基于同一个时延向量预编码得到,如时延向量b(τ2);RB#3、RB#7、RB#11和RB#15上承载的预编码参考信号可以基于同一时延向量预编码得到,如时延向量b(τ3);RB#4、RB#8、RB#12和RB#16上承载的预编码参考信号可以基于同一时延向量预编码得到,如时延向量b(τ4)。
由于同一频域组中承载的预编码参考信号是基于同一时延向量预编码得到,因此,同一频域组中承载的预编码参考信号可对应同一时延向量,也可以对应同一端口组,每个端口组包括T个发射天线端口。不同频域组中承载的预编码参考信号是基于不同的时延向量预编码得到,因此,不同频域组中承载的预编码参考信号可对应不同的时延向量。不同频域组中承载的预编码参考信号所对应的端口号可以相同,也可以不同。本申请对此不作限定。例如,频域组#1至频域组#4中承载的预编码参考信号均可对应端口#1至端口#T;又例如,频域组#1中承载的预编码参考信号可对应端口#1至端口#T;频域组#2中承载的预编码参考信号可对应端口#T+1至端口#2T;频域组#3中承载的预编码参考信号可对应端口#2T+1至端口#3T;频域组#4中承载的预编码参考信号可对应端口#3T+1至端口#4T。
应理解,对每个频域组加载一个时延向量仅为便于理解而示例。本申请对每个频域组加载的时延向量个数不作限定。
例如,图中示出的每个RB上承载的预编码参考信号可对应更多端口,例如2T个,即,L’=2。8个端口的预编码参考信号例如可以基于2个时延向量分别对T个发射天线端口的参考信号预编码得到。其中,2个时延向量可以是取自上述4个时延向量中的两个。
应理解,上文列举的L的取值以及对每个频域组加载的时延向量个数L’仅为示例,不应对本申请构成任何限定。本申请对于L和L’的取值以及每个频域组加载的时延向量个数均不作限定。
可以理解的是,当每个频域组加载的时延向量的个数为L时,也就相当于没有对RB做分组。
应理解,图6仅为便于理解而示例,并未完整地示出一个RB中的全部RE,本申请对于每个RB中的RE数不作限定。此外,本申请对于每个RB上承载的预编码参考信号所对应的端口以及各端口的参考信号之间复用资源的具体方式不作限定。
进一步地,时延向量的长度为 对于每个端口来说,所对应的时延向量中的
对于每个端口来说,所对应的时延向量中的 个元素可以与
个元素可以与 个RB一一对应。每个端口的预编码参考信号在M个频域组的第m(1≤m≤M,m为整数)个频域组中第n个RB上的值至少由M个时延向量的第m个时延向量中的第n个元素确定。
个RB一一对应。每个端口的预编码参考信号在M个频域组的第m(1≤m≤M,m为整数)个频域组中第n个RB上的值至少由M个时延向量的第m个时延向量中的第n个元素确定。
可选地,时延向量的长度为 对于每个端口来说,所对应的时延向量中的
对于每个端口来说,所对应的时延向量中的 个元素可以与
个元素可以与 个RB一一对应。因此,每个端口的预编码参考信号在L个频域组的第l(1≤l≤L,l为整数)个频域组中第n个RB上的值至少由L个时延向量的第l个时延向量中的第n个元素确定。
个RB一一对应。因此,每个端口的预编码参考信号在L个频域组的第l(1≤l≤L,l为整数)个频域组中第n个RB上的值至少由L个时延向量的第l个时延向量中的第n个元素确定。
例如,该16个RB中的第1个RB(即,RB#1),也就是,频域组#1中的第1个RB,承载的预编码参考信号至少由时延向量b(τ1)中的第1个元素确定;该16个RB中的第5个RB(即,RB#5),也就是,频域组#1中的第2个RB,承载的预编码参考信号至少由时延向量b(τ1)中的第2个元素确定;该16个RB中的第9个RB(即,RB#9),也就是,频域组#1中的第3个RB,承载的预编码参考信号至少由时延向量b(τ1)中的第3个元素确定;该16个RB中的第13个RB(即,RB#14),也就是,频域组#1中的第4个RB,承载的预编码参考信号至少由时延向量b(τ1)中的第4个元素确定。
应理解,其他频域组中的各RB与时延向量中各元素的对应关系与之相似,为了简洁,这里就不一一列举。
需要说明的是,由于网络设备基于上行信道测量确定的L个时延向量的长度可能为N。而在对RB做了分组之后,用于对参考信号进行预编码的时延向量的长度为 网络设备可以基于上行信道测量确定的L个时延向量,从每个时延向量中抽取出一部分元素形成新的L个时延向量。这里为方便区分和说明,将上行信道测量确定的L个时延向量称为L个原始时延向量。
网络设备可以基于上行信道测量确定的L个时延向量,从每个时延向量中抽取出一部分元素形成新的L个时延向量。这里为方便区分和说明,将上行信道测量确定的L个时延向量称为L个原始时延向量。
具体地,若将N个RB分为L个频域组。该L个频域组中的第l个频域组对应于L个原始时延向量中的第l个原始时延向量,且该第l个频域组中的第1个、第2个、第3个直至第 个RB分别与第l个原始时延向量中的第l个、第l+L个、第l+2L个直至第
个RB分别与第l个原始时延向量中的第l个、第l+L个、第l+2L个直至第 个元素对应。以此类推,第l个频域组中的第n个RB可以对应于第l个原始时延向量中的第l+(n-1)×L个元素。
个元素对应。以此类推,第l个频域组中的第n个RB可以对应于第l个原始时延向量中的第l+(n-1)×L个元素。
应理解,上文仅为区分,定义了原始时延向量。在后文实施例中,并不涉及原始时延向量。后文实施例中所涉及的时延向量均可以理解为用于对参考信号进行频域预编码的时延向量。时延向量的长度可以为N,也可以为
还应理解,上文仅为便于理解,结合附图详细说明了对N个RB分组以及基于L个时延向量对L个频域组上的参考信号进行频域预编码的过程。但这不应对本申请构成任何限定。本申请对于N个RB的分组方式不作限定。本申请对于每个频域组与时延向量的对应关系也不做限定。本申请对于每个频域组中各RB与时延向量中各元素的对应关系也不做限定。
还应理解,上文仅为便于理解,列举了各个RB上承载的预编码参考信号与端口的对应关系,但这不应对本申请构成任何限定,本申请对于各个RB承载的预编码参考信号与时延向量和端口的对应关系不作限定。
还应理解,图6仅为示例,详细说明了时延向量加载到参考信号上的具体过程。但应理解,这不应对本申请构成任何限定。
还应理解,上文仅为便于理解,结合附图说明了基于多个时延向量对参考信号进行预编码并映射到RB上的具体过程,但这不应对本申请构成任何限定。本申请对于RB数、频域组数、时延向量数、发射天线端口数以及参考信号端口数均不做限定。本申请对于每个端口在各RB上对应的RE的位置也不做限定。
还应理解,上文中基于每个RB来定义端口数仅为一种可能的实现方式,而不应对本申请构成任何限定。本申请另提出一种定义端口数的方法,即,端口数可以是指每个参考信号资源上承载的预编码参考信号所对应的端口的个数。换句话说,端口数可以跨RB定义。
这种定义端口数的方式可应用于对RB进行分组的情况。
可选地,该方法500还包括:终端设备接收第六指示信息,该第六指示信息用于配置一个参考信号资源。相应地,网络设备发送该第六指示信息。
该第六指示信息所配置的参考信号资源可用于承载预编码参考信号,且该参考信号资源承载的预编码参考信号可以是基于上述L个时延向量预编码得到的参考信号。并且,该参考信号资源中,至少有两个RB上承载的预编码参考信号是基于不同的时延向量预编码得到的。并且,当两个RB承载的预编码参考信号对应不同的时延向量时,该两个RB承载的预编码参考信号对应的端口号可以不同。换句话说,至少有两个RB上承载的预编码参考信号对应不同的端口。因此,在同一参考信号资源中,各RB上承载的预编码参考信号所对应的端口并不一定相同。
在本实施例中,参考信号资源例如可以包括上文结合图5描述的16个RB,也就是可以包括多个频域组。该参考信号资源中承载的预编码参考信号可以对应P个端口。
需要说明的是,当网络设备对RB做了分组,以通过不同的时延向量来对不同的RB上承载的参考信号进行预编码时,网络设备可以基于上述第五指示信息配置的多个参考信号资源来传输预编码参考信号,也可以基于上述第六指示信息配置的一个参考信号资源来传输预编码参考信号,本申请对此不作限定。
在步骤520中,终端设备生成第三指示信息,该第三指示信息可用于指示至少一个角度向量和P个加权系数。
由于预编码参考信号在经由无线信道被发送至终端设备时,经历了下行信道。因此,终端设备可以检测到不具有完全互易性的、下行信道的信息。终端设备可以基于接收到的预编码参考信号,确定可用于构建与下行信道相适配的预编码矩阵的角度向量及其对应的加权系数。终端设备可以基于所确定的角度向量和加权系数生成第五指示信息。
首先,终端设备可以基于预编码参考信号,估计下行信道。
如前所述,终端设备接收到的预编码参考信号是基于L个时延向量对参考信号预编码得到。终端设备可以基于各端口对应的预编码参考信号估计下行信道,也就是,基于由L个时延向量预编码得到的预编码参考信号估计下行信道。
若不考虑对参考信号做预编码,对于每个接收天线来说,下行信道的维度可以是N×T。在一个接收天线、一个RB上接收到的下行信道的维度可以是1×T。由于网络设备基于一个或多个时延向量对参考信号进行了预编码,则终端设备基于在每个接收天线、每个RB上接收到的、预编码参考信号进行信道估计得到的下行信道估计值的维度可以是1×(T×L)或1×(T×L’)。其中,T×L可以表示对T个发射天线端口中每个发射天线端口的参考信号加载L个时延向量,T×L’可以表示对T个发射天线端口中每个发射天线端口的参考信号加载L’个时延向量。
应理解,终端设备基于预编码参考信号估计信道矩阵的具体方法可以参考现有技术中的信道估计方法,为了简洁,这里省略对该具体方法的详细说明。
此后,终端设备根据下行信道估计值,确定用于构成P个角度时延对的至少一个角度向量以及该P个角度时延对对应的P个加权系数。该至少一个角度向量和P个加权系数可以通过第三指示信息反馈给网络设备。
该至少一个角度向量和P个加权系数可以是终端设备基于下行信道的信道估计值确定,因此也可以说,该至少一个角度向量和P个加权系数可以由基于L个时延向量预编码得到的预编码参考信号确定。或者说,该至少一个时延向量和P个加权系数可以基于由K个角度向量中的每个角度向量预编码得到的预编码参考信号确定。
在一种实现方式中,终端设备可以针对每个时延向量分别确定至少一个角度向量。针对各时延向量确定的角度向量可以互不相同。针对各时延向量确定的角度向量也可以部分不同。当针对至少两个时延向量确定的角度向量不同时,终端设备可以基于每个时延向量确定对应的一个或多个角度向量。
例如,针对第l个时延向量确定的角度向量的个数为Kl个,Kl≥1,且为整数。由于该Kl个角度向量是针对第l个时延向量确定,因此,可以与第l个时延向量构成Kl个角度时延对。L个时延向量以及与每个时延向量对应的角度向量可构成P个角度时延对,即,终端设备确定的角度向量的数量为P, 1≤k≤K,且k为整数。
1≤k≤K,且k为整数。
可选地,P个角度向量包括针对L个时延向量中的每个时延向量确定的一个或多个角度向量。其中,基于第l个时延向量确定的Kl个角度向量可以是在多个RB上基于第l个时延向量预编码得到的预编码参考信号进行信道估计的多个信道估计值确定。
其中,针对至少两个时延向量确定的角度向量不同,可以是指,至少有两个时延向量对应的角度向量不同,但其他时延向量分别对应的角度向量可以相同,也可以不同,本申请对此不作限定。换句话说,针对各时延向量确定的角度向量可以部分或全部不同。
其中,两个时延向量对应的角度向量不同,可以是指,两个时延向量对应的角度向量完全不同,即,没有重复,或者说,没有交集;也可以是指,两个时延向量对应的角度向量部分不同,即,有部分重复,但不完全相同,或者说,有交集,但不完全相同。此外,两个时延向量对应的角度向量不同时,两个时延向量对应的角度向量的个数可以相同,也可以不同,本申请对此不作限定。
基于每个时延向量确定的角度向量的个数可以由网络设备指示。由于角度具有上下行信道互易性,网络设备可以根据上行信道测量所确定的角度个数,向终端设备指示下行信道测量需要反馈的角度个数。其中,每个角度可以通过一个角度向量来表征。可选地,在步骤520之前,该方法还包括:终端设备接收第四指示信息,该第四指示信息用于指示针对每个时延向量反馈的角度向量的个数。相应地,网络设备发送该第四指示信息。
基于每个时延向量确定的角度向量的个数也可以由终端设备确定,并上报网络设备。终端设备可以基于接收到的预编码参考信号,确定与各时延向量对应的一个或多个角度向量。终端设备在确定角度向量的同时,可以确定与各时延向量对应的角度向量的个数。可选地,该方法还包括:终端设备发送第四指示信息,该第四指示信息用于指示针对每个时延向量反馈的角度向量的个数。相应地,网络设备接收该第四指示信息。
由终端设备自行确定各时延向量对应的角度向量的个数时,终端设备可以根据下行信道的估计值来确定,后文中步骤220中会详细说明终端设备根据下行信道的估计值来确定各时延向量对应的角度向量的具体过程。这里暂且省略对该具体过程的详细描述。
终端设备例如可以在下文所述的第一指示信息中指示各时延向量对应的角度向量的个数。即,上述第四指示信息可以和第三指示信息为同一指示信息。或者,该第四指示信息也可以独立于第三指示信息,终端设备例如可以通过CSI来携带该第四指示信息。
终端设备基于下行信道测量来确定各时延向量对应的角度个数,能够更准确地基于下行信道的状态来反馈,特别适用于角度的上下行互易性不是很好的场景。
可选地,基于每个时延向量确定的角度向量的个数也可以是预定义值。例如,可以由协议预定义。
本申请对于针对每个时延向量反馈的角度向量的个数及该个数的获取方式不作限定。
下面详细说明终端设备基于接收到的预编码参考信号确定与各角度向量对应的时延向量以及各角度时延对的加权系数。
如前所述,空频矩阵HDL满足HDL=SCDLFH。在本实施例中,HDL的维度可以是T×N;角度向量可以为K个,每个角度向量的长度可以是T,则S的维度可以是T×K;每个时延向量可以为L个,每个时延向量的长度可以是N,则F的维度可以是N×L。对上式变形可以得到:(FTHDL T)T=SCDL。HDL T是由真实信道确定的空频矩阵;FTHDL T表示将时延向量加载到下行信道上,终端设备测得的信道估计值的和,其结果维度可以是L×T。
终端设备可以基于接收到的预编码参考信号进一步确定用于构建下行信道的角度向量以及各角度时延对的加权系数。
在本实施例中,若网络设备没有对RB做分组,则每个RB的预编码参考信号可对应T×L个端口。该T×L个端口可以理解为与L个时延向量对应的L组端口。该L组端口中的第l组端口所对应的预编码参考信号例如可以是基于一个时延向量,如第l个时延向量,对参考下信号做预编码并通过T个发射天线端口发送的预编码参考信号。
对于第l组端口的预编码参考信号,终端设备可以基于N个RB上接收到的下行信道确定第l个时延向量对应的至少一个角度向量及其对应的加权系数。该第l个时延向量对应的角度向量和加权系数分别可以由N个RB上的N个信道估计值叠加求和来确定。
对于第l组端口的预编码参考信号,终端设备可以基于N个RB上接收到的下行信道估计第l个时延向量对应的至少一个角度向量,以及由该第l个时延向量和至少一个角度向量确定的角度时延对的加权系数。
假设终端设备基于第l组端口的预编码参考信号在一个RB上进行信道估计所得的下行信道的估计值记作 该估计值
该估计值 可以是维度为T×1的向量。则终端设备在N个RB上基于第l组端口的预编码参考信号进行信道估计得到的多个估计值的和可以表示为y(l),
可以是维度为T×1的向量。则终端设备在N个RB上基于第l组端口的预编码参考信号进行信道估计得到的多个估计值的和可以表示为y(l), 则y(l)也可以为维度为T×1的向量。
则y(l)也可以为维度为T×1的向量。
终端设备可以根据该向量y(l)确定第l个时延向量对应的至少一个角度向量以及加权系数。假设该角度向量均取自DFT矩阵,终端设备可以将该向量y(l)投影至预先定义的角度向量集合中的各个角度向量上,以得到多个投影值。终端设备可以根据各投影值的模长大小,将模较大的Kl个投影值所对应的角度向量集合中的Kl个列确定为第l个时延向量对应的至少一个角度向量,即,与第l个时延向量对应的Kl个角度向量,可用于与第l个时延向量组合得到Kl个角度时延对。终端设备还可将上述模较大的Kl个投影值确定为与该Kl个角度时延对对应的加权系数。
例如,与第l个时延向量对应的Kl个加权系数可以通过下文示出的矩阵运算获得: 该向量
该向量 中的模最大的Kl个元素即为上述与第l个时延向量对应的Kl个加权系数。
中的模最大的Kl个元素即为上述与第l个时延向量对应的Kl个加权系数。
需要说明的是,该Kl个加权系数可以是P个角度时延对中与第l个时延向量(或者说第l组端口)对应的Kl个角度时延对的加权系数。该Kl个角度时延对中的每个角度时延对可以是由上述第l个时延向量和与第l个时延向量对应的Kl个角度向量确定。因此,该Kl个加权系数可以称为与Kl个角度向量对应的加权系数,或者,与第l个时延向量对应的加权系数。
若网络设备对RB做分组,则每个RB的预编码参考信号可对应T×L’个端口。该T×L’个端口可以理解为与L’个时延向量对应的L’组端口。终端设备可以根据预先定义的分组规则确定各端口的预编码参考信号占用的时频资源,进而可以在相应的时频资源上接收各组端口的预编码参考信号。
终端设备在接收到各组端口的预编码参考信号后,可以基于上文所述的方法进行信道估计。所不同的是,每组端口的预编码参考信号并不一定承载在N个RB上,而可能承载在N个RB中的部分RB上,例如某一频域组的RB上。此情况下,上述P个加权系数可以分别由各个频域组上承载的预编码参考信号确定。因此,终端设备在基于某一组端口的预编码参考信号对信道估计值做全带叠加时,可以将用于承载同一组端口的预编码参考信号的RB上估计得到的信道估计值求和,以得到与各组端口对应的信道估计值。
终端设备并不感知网络设备对参考信号做预编码所使用的时延向量,也不感知各频域组与发射天线端口和时延向量的组合的对应关系。终端设备只需基于预先定义的分组规则,根据各个频域组上接收到的预编码参考信号进行信道估计即可。
以图5中所示的分组方式为例,RB#1、RB#5、RB#9和RB#13可以归为频域组#1;RB#2、RB#6、RB#10和RB#14可以归为频域组#2;RB#3、RB#7、RB#11和RB#15可以归为频域组#3;RB#4、RB#8、RB#12和RB#16可以归为频域组#4。
终端设备可以基于RB#1、RB#5、RB#9和RB#13上接收到的预编码参考信号确定至少一个加权系数,如K1个,该K1个加权系数可以是以及由时延向量b(τ1)以及针对时延向量b(τ1)确定的K1个角度向量构成的K1个角度时延对的加权系数;终端设备可以基于RB#2、RB#6、RB#10和RB#14上接收到的预编码参考信号确定至少一个加权系数,如K2个,该K2个加权系数可以是以及由时延向量b(τ2)以及针对时延向量b(τ2)确定的K2个角度向量构成的K2个角度时延对的加权系数;终端设备可以基于RB#3、RB#7、RB#11和RB#15上接收到的预编码参考信号确定至少一个加权系数,如K3个,该K3个加权系数可以是以及由时延向量b(τ3)以及针对时延向量b(τ3)确定的K3个角度向量构成的K3个角度时延对的加权系数;终端设备可以基于RB#4、RB#8、RB#12和RB#16上接收到的预编码参考信号确定至少一个加权系数,如K4个,该K4个加权系数可以是以及由时延向量b(τ4)以及针对时延向量b(τ4)确定的K4个角度向量构成的K4个角度时延对的加权系数。
由于网络设备在对RB做了分组的情况下,终端设备需要预先知道频域组数,因此,网络设备可以预先通过信令通知终端设备频域组数。
可选地,该方法还包括:终端设备接收第七指示信息,该第七指示信息用于指示频域组数。相应地,网络设备发送该第七指示信息。
如前所示,网络设备可以预先通过高层信令配置端口数。因此,终端设备可以基于已有信令确定每个RB上承载的预编码参考信号对应的端口数。在网络设备对RB做了分组的情况下,网络设备可以进一步通过第四指示信息指示频域组数。终端设备可以基于相同的分组规则,确定每个频域组中的RB,进而估计每个端口的下行信道,确定每个角度时延对的加权系数。
需要说明的是,终端设备和网络设备可以预先约定RB的分组规则。双方可以根据预先定义的分组规则对RB进行分组,以便于双方确定的各频域组中包括的RB是一致的。
在本实施例中,频域组数可以为时延向量数。可选地,该第六指示信息用于指示L的值。又由于P=T×L,在RB分组的情况下,每个RB上承载的预编码参考信号对应的端口数为K,则终端设备可以由P和T求出L。因此,该第四指示信息可直接指示L的值,也可以通过指示P的值来间接指示L的值。本申请对此不作限定。换句话说,该第六指示信息可用于指示L和P中的任意一项。
因此,终端设备可以根据与各组端口对应的信道估计值,确定与L个时延向量中的每个时延向量对应的至少一个角度向量和加权系数。上文中已经对终端设备根据各组端口对应的信道估计值确定每个时延向量对应的角度向量和加权系数的具体方法做了详细说明,为了简洁,这里不再赘述。
应理解,终端设备根据各组端口对应的信道估计值确定与每个时延向量对应的角度向量和加权系数的方式并不限于上文所列举。本申请对于终端设备确定各组端口对应的信道估计值确定与每个时延向量对应的角度向量和加权系数的具体方式不作限定。终端设备例如可以利用现有技术中的JADE算法等,或者通过上述DFT等方式确定各时延向量对应的角度向量和加权系数,为了简洁,这里不再一一举例说明。
还应理解,基于不同的实现方式和算法,终端设备可以通过同一处理步骤同时确定同一时延向量对应的角度向量和加权系数,也可以通过不同的处理步骤分别确定同一时延向量对应的角度向量和加权系数。本申请对此不作限定。
基于信道估计确定的Kl个角度向量及各角度向量的加权系数,下行信道的估计值y(l)可以近似为: 其中,
其中, 表示与第l组端口(或者说,第l个时延向量)对应的Kl个角度向量中的第kl个角度向量,
表示与第l组端口(或者说,第l个时延向量)对应的Kl个角度向量中的第kl个角度向量, 表示角度向量
表示角度向量 的加权系数。
的加权系数。
终端设备可以基于上文所述的方法,根据接收到的预编码参考信号估计得到L组角度向量和L组加权系数。每组角度向量可对应一组加权系数。其中,第l组角度向量可以包含Kl个角度向量,第l组加权系数可以包含Kl个加权系数。
可以理解的是,各组角度向量中包含的角度向量的个数可以各不相同,或者,各组角度向量中包含的角度向量的个数可以两两相同。由于各组角度向量中包含的角度向量的个数可能相同或不同,各组加权系数中包含的加权系数的个数也可能相同或不同。本申请对此不作限定。
在另一种实现方式中,终端设备可以针对L个时延向量确定至少一个角度向量,例如记作K个,K≥1,且为整数。该K个角度向量可以是L个时延向量共用的角度向量,以用于构成P个角度时延对,即,P=K×L。
可选地,该第三指示信息用于指示K个角度向量时,该K个角度向量是基于L个时延向量反馈。该L个时延向量中的任意两个时延向量对应的K个角度向量相同。也就是说,L个时延向量中,针对第一时延向量反馈的一个或多个角度向量和针对第二时延向量反馈的一个或多个角度向量相同。该第一时延向量和第二时延向量为L个时延向量中的任意两个时延向量。换句话说,该K个角度向量可以被L个时延向量共用。终端设备在通过上述第三指示信息指示该K个角度向量时,可以仅生成一个用于指示该K个角度向量的信息。
上述K的值可以是由网络设备预先通过信令指示。由于时延具有上下行信道互易性,网络设备可以根据上行信道测量所确定的时延个数,向终端设备指示下行信道测量需要反馈的时延个数。其中,每个时延可以通过一个时延向量来表征。可选地,在步骤220之前,该方法还包括:终端设备接收第四指示信息,该第四指示信息用于指示K的值。相应地,网络设备发送该第四指示信息。
上述K的值也可以是由终端设备确定并上报网络设备。终端设备可以基于接收到的预编码参考信号,确定L个时延向量对应的K个角度向量。终端设备在确定角度向量的同时,可以确定与L个时延向量对应的角度向量的个数。可选地,该方法还包括:终端设备发送第四指示信息,该第四指示信息用于指示K的值。相应地,网络设备接收该第四指示信息。
终端设备例如可以在下文所述的第三指示信息中指示角度向量的个数。即,上述第四指示信息可以和第三指示信息为同一指示信息。或者,该第四指示信息也可以独立于第三指示信息,终端设备例如可以通过CSI来携带该第四指示信息。
终端设备基于下行信道测量来确定各时延向量对应的角度个数,能够更准确地基于下行信道的状态来反馈,特别适用于角度的上下行互易性不是很好的场景。
可选地,上述K也可以是预定义值。例如,可以由协议预定义。
本申请对于K的值及其获取方式不作限定。
该K个角度向量可以是基于L个时延向量预编码得到的预编码参考信号确定的,也可以是基于某一时延向量预编码得到的预编码参考信号确定的,本申请对此不作限定。
终端设备由基于L个时延向量预编码得到的预编码参考信号估计下行信道,并基于下行信道的估计值确定K个角度向量的具体方法,可以与上文所述的终端设备由基于K个角度向量预编码得到的预编码参考信号估计的下行信道估计值确定L个时延向量的具体方法相似。为了简洁,这里不再赘述。
应理解,终端设备基于L个时延向量预编码得到的预编码参考信号确定K个角度向量和P个加权系数的具体方法仅为便于理解而示例,不应对本申请构成任何限定。终端设备例如可以利用现有技术中的JADE算法等,或者通过上述DFT等方式,确定K个角度向量和P个加权系数为了简洁,这里不再一一举例说明。
还应理解,基于不同的实现方式和算法,终端设备可以通过同一处理步骤同时确定K个角度向量和P个加权系数,也可以通过不同的处理步骤分别确定K个角度向量和P个加权系数。本申请对此不作限定。
终端设备可以基于上文所述的方法,根据接收到的预编码参考信号估计得到一组角度向量和L组加权系数。其中,这一组角向量可以包含K个角度向量,每组加权系数可以包含K个加权系数。可以理解的是,由于这一组角度向量中的K个角度向量可以被L个时延向量共用,各组加权系数中包含的加权系数的个数均可以为K。
在上文列举的多种实现方式中,终端设备可以针对每个时延向量分别反馈一个或多个角度向量,也可以针对L个时延向量共同反馈一个或多个角度向量。终端设备基于每个时延向量分别反馈还是基于多个时延向量共同反馈,可以是协议预先定义,也可以由网络设备预先通过信令指示,例如可以通过信令显式指示,也可以通过上述第四指示信息隐式指示,如,若指示针对每个时延向量反馈的角度向量的个数,则表示基于每个时延向量分别反馈;若仅指示一个角度向量的个数,则表示基于多个时延向量共同反馈。本申请对此不作限定。
终端设备在确定了用于构成P个角度时延对的至少一个角度向量和P个加权系数后,可以生成第三指示信息,以指示上述至少一个角度向量和P个加权系数。
终端设备通过第三指示信息指示至少一个角度向量和P个加权系数的具体方法与上文方法200中通过第一指示信息指示至少一个时延向量和P个加权系数的具体方法相似。例如可以通过位图、索引等方式来指示至少一个时延向量,又例如可以通过归一化方式来指示P个加权系数。由于上文方法200中对第一指示信息指示至少一个时延向量和P个加权系数的具体方法做了详细说明,为了简洁,这里不再赘述。
需要说明的是,上文中以一个极化方向、一个接收天线为例详细说明了终端设备生成第五指示信息的具体过程。换句话说,上述P个加权系数可以是基于一个极化方向的发射天线发送且在一个接收天线上接收到的预编码参考信号确定的。但这不应对本申请构成任何限定。
当终端设备配置有多个接收天线时,上文举例描述的一个接收天线可以为终端设备配置的多个接收天线中的任意一个。也就是说,终端设备可以基于上文所述的方法,对每个接收天线分别确定P个加权系数。
当网络设备配置有多个极化方向的发射天线时,上文举例描述的一个极化方向可以是多个极化方向中的任意一个极化方向。也就是说,终端设备可以基于上文所述的方法,基于每个极化方向的发射天线发送的预编码参考信号确定P个加权系数。
若极化方向数为1,接收天线数为R,R>1且为整数。该第三指示信息可用于指示与R个接收天线对应的R组角度向量和R组加权系数,每组角度向量可以包括与L个时延向量对应的一个或多个角度向量,每组加权系数可以包括P个加权系数。这里,与一个接收天线对应的P个加权系数,也就是基于这个接收天线上接收到的预编码参考信号确定的P个加权系数。
由于上文方法200中已经对此情况下第一指示信息中的具体内容做了详细说明。为了简洁,这里不再赘述。
若接收天线数为1,极化方向数为J,J>1且为整数。该第三指示信息可用于指示与J个极化方向对应的J组角度向量和J组加权系数,每组角度向量可以包括与L个时延向量对应的一个或多个角度向量,每组加权系数可以包括P个加权系数。这里,与一个极化方向对应的P个加权系数,也就是基于这个极化方向发射的预编码参考信号确定的P个加权系数。
由于上文方法200中已经对此情况下第一指示信息中的具体内容做了详细说明。为了简洁,这里不再赘述。
若接收天线数为R,极化方向数为J,该第三指示信息可用于指示与J个极化方向、R个接收天线对应的J×R组角度向量和J×R×P个加权系数。
由于上文方法200中已经对此情况下第一指示信息中的具体内容做了详细说明。为了简洁,这里不再赘述。
此外,在基于接收天线反馈加权系数的情况下,终端设备还可以进一步指示接收天线数。可选地,该方法200还包括:终端设备发送第八指示信息,该第八指示信息用于指示接收天线数。相应地,网络设备接收该第八指示信息。
该第八指示信息和上述第三指示信息可以承载在同一个信令中发送,如PMI或CSI;也可以通过不同的信令发送,本申请对此不作限定。
应理解,终端设备的接收天线数也可以预先定义,如协议定义。此情况下,终端设备可以不通过额外的信令指示接收天线数。
事实上,终端设备反馈下行信道的测量结果并不限于基于每个接收天线来反馈,终端设备也可以基于传输层来反馈下行信道的测量结果。
在本实施例中,终端设备可以基于上文所述的方法确定每个极化方向、每个接收天线对应的加权系数之后,可以进一步对该加权系数进行处理,以得到基于每个传输层反馈的加权系数。
由于上文方法200中已经详细说明了终端设备确定每个传输层对应的P个加权系数的具体方法,也详细说明了终端设备通过第一指示信息指示每个传输层对应的加权系数的具体方法。本实施例中终端设备确定每个传输层对应的P个加权系数的具体方法和通过第五指示信息指示每个传输层对应的P个加权系数的具体方法可以与之相似。为了简洁,这里不再赘述。
在基于传输层反馈加权系数的情况下,终端设备还可进一步指示传输层数。可选地,该方法200还包括:终端设备发送第九指示信息,该第九指示信息用于指示传输层数。相应地,网络设备接收该第九指示信息。
可选地,该第九指示信息为RI。
应理解,RI仅为第九指示信息的一例,不应对本申请构成任何限定。本申请对于第九指示信息的具体形式不作限定。
还应理解,该第九指示信息和上述第三指示信息可以承载在同一个信令中发送,如CSI;也可以通过不同的信令发送,本申请对此不作限定。
还应理解,上文列举的通过构造系数矩阵并对系数矩阵进行SVD确定各传输层对应的加权系数的方法仅为示例,不应对本申请构成任何限定。本申请对于确定各传输层的加权系数的具体方法不作限定。
在步骤530中,终端设备发送第三指示信息。相应地,网络设备接收该第三指示信息。
应理解,步骤530与方法200中的步骤230的具体过程相同,由于上文方法200中已经对步骤230做了详细说明,为了简洁,这里不再赘述。
在步骤540中,网络设备根据第五指示信息确定预编码矩阵。
如前所述,终端设备可以基于接收天线反馈角度向量和加权系数,也可以基于传输层反馈角度向量和加权系数。网络设备可基于不同的反馈粒度,根据第三指示信息确定预编码矩阵。
若终端设备基于接收天线反馈角度向量和加权系数,则该第三指示信息所指示的角度向量可以包括一个或多个接收天线对应的角度向量,该第三指示信息所指示的加权系数可以包括一个或多个接收天线对应的加权系数。网络设备可以基于每个接收天线所对应的角度向量和加权系数,重构下行信道,进而确定各RB的预编码矩阵。
具体地,由于每个接收天线所对应的P个加权系数可以分别与P个角度时延对一一对应。由于未对参考信号做空域预编码,网络设备可以基于每个接收天线对应的P个加权系数,以及P个角度时延对中与每个时延向量对应的一个或多个角度向量,构造与各接收天线对应的空频矩阵,基于各接收天线对应的空频矩阵重构与各RB对应的下行信道矩阵,进而确定与各RB对应的预编码矩阵。
在本实施例中个,与第r个接收天线对应的空频矩阵可以通过与第r个接收天线对应的P个角度时延对和与第r个接收天线对应的P个加权系数确定。其中,P个角度时延对可以用于构造P个空频分量矩阵。如前所述,由L个时延向量中的第l个时延向量b(τl)和Kl个角度向量中的第kl个角度向量 可以构造空频分量矩阵
可以构造空频分量矩阵 与第r个接收天线对应的空频矩阵
与第r个接收天线对应的空频矩阵 可以是上述P个空频分量矩阵的加权和。即,
可以是上述P个空频分量矩阵的加权和。即, 该空频矩阵的维度可以是T×N。其中,
该空频矩阵的维度可以是T×N。其中, 表示基于第r个接收天线反馈的由第l个时延向量及其对应的第kl个角度向量构成的角度时延对的加权系数。
表示基于第r个接收天线反馈的由第l个时延向量及其对应的第kl个角度向量构成的角度时延对的加权系数。
需要说明的是,上文为方便理解,以发射天线的一个极化方向为例来说明了确定与接收天线对应的空频矩阵的具体过程。但这不应对本申请构成任何限定。当发射天线的极化方向数大于1时,网络设备仍然可以基于如上所述的方法来确定与各接收天线对应的空频矩阵。
例如,极化方向数为2,与第r个接收天线对应的空频矩阵可以通过如下计算式确定:

其中, 表示基于第r个接收天线反馈的第一极化方向上由第l个时延向量及其对应的第kl个时延向量构成的角度时延对的加权系数;
表示基于第r个接收天线反馈的第一极化方向上由第l个时延向量及其对应的第kl个时延向量构成的角度时延对的加权系数; 表示基于第r个接收天线反馈的第二极化方向上由第l个时延向量及其对应的第kl个时延向量构成的角度时延对的加权系数。
表示基于第r个接收天线反馈的第二极化方向上由第l个时延向量及其对应的第kl个时延向量构成的角度时延对的加权系数。
可以理解的是,当L个时延向量中的任意两个时延向量对应相同的K个角度向量时,上述计算式中的下角标kl和Kl中的l可以省略。即,分别为 以及
以及
应理解,上文对于2个极化方向定义的空频矩阵 的计算式仅为示例,不应对本申请构成任何限定。例如,在不同的极化方向上加载的时延向量和/或角度向量的数量可以相同也可以不同,在不同的极化方向上加载是时延向量和/或角度向量可以相同,也可以不同。
的计算式仅为示例,不应对本申请构成任何限定。例如,在不同的极化方向上加载的时延向量和/或角度向量的数量可以相同也可以不同,在不同的极化方向上加载是时延向量和/或角度向量可以相同,也可以不同。
对于R个接收天线而言,网络设备可以分别基于每个接收天线对应的P个加权系数确定空频矩阵 至
至 由此,网络设备可确定与各RB对应的下行信道矩阵。
由此,网络设备可确定与各RB对应的下行信道矩阵。
以N个RB中的第n个RB为例,网络设备可以确定与第n个RB对应的下行信道矩阵的转置(V(n))T。其中,矩阵(V(n))T可以是由上述基于R个接收天线分别确定的R个空频矩阵 至
至 中每个空频矩阵中的第n个列向量确定。例如,将
中每个空频矩阵中的第n个列向量确定。例如,将 中的第n列作为矩阵(V(n))T的第1列,将
中的第n列作为矩阵(V(n))T的第1列,将 中的第n列作为矩阵(V(n))T的第2列;以此类推,可以将
中的第n列作为矩阵(V(n))T的第2列;以此类推,可以将 中的第n列作为矩阵(V(n))T的第r列。由此可以得到矩阵(V(n))T,进而可以确定与第n个RB对应的下行信道矩阵V(n)。
中的第n列作为矩阵(V(n))T的第r列。由此可以得到矩阵(V(n))T,进而可以确定与第n个RB对应的下行信道矩阵V(n)。
基于上述方法可以确定与各RB分别对应的下行信道矩阵。
网络设备可以进一步根据与各RB对应的下行信道矩阵确定各RB的预编码矩阵。例如,网络设备可以通过对下行信道矩阵或信道矩阵的协方差矩阵进行SVD的方式确定预编码矩阵,或者,也可以通过对下行信道矩阵的协方差矩阵进行特征值分解(eigenvaluedecomposition,EVD)的方式确定。
应理解,网络设备根据信道矩阵确定预编码矩阵的具体方式可以参考现有技术,本申请对于预编码矩阵的确定方式不作限定。
还应理解,上文中仅为便于理解,示出了网络设备基于空频矩阵确定下行信道矩阵,进而确定预编码矩阵的具体过程。但这不应对本申请构成任何限定。网络设备也可以根据空频矩阵直接确定预编码矩阵。例如,基于空频矩阵可以确定得到矩阵V(n),网络设备可以通过对V(n)进行SVD,然后取右特征向量的方式确定预编码矩阵;又例如,网络设备可以通过直接对(V(n))T进行SVD,然后取左特征向量的共轭的方式确定预编码矩阵。
若终端设备基于传输层反馈角度向量和加权系数,则该第三指示信息所指示的加权系数可以包括一个或多个传输层的加权系数。网络设备可以基于每个传输层对应的至少一个角度向量和加权系数,确定与传输层对应的空频矩阵,进而确定各RB的预编码矩阵。
具体地,由于每个传输层对应的P个加权系数可以分别与P个角度时延对一一对应。网络设备可以基于每个传输层对应的P个加权系数,以及P个角度时延对中与时延向量对应的一个或多个角度向量,构造与传输层对应的空频矩阵。
在本实施例中,与第z个传输层对应的空频矩阵 可以通过P个角度时延对和与第z个传输层对应的P个加权系数确定。其中,P个角度时延对可用于构造P个空频分量矩阵。如前所述,由L个时延向量中的第l个时延向量b(τl)和Kl个角度向量中的第kl个角度向量
可以通过P个角度时延对和与第z个传输层对应的P个加权系数确定。其中,P个角度时延对可用于构造P个空频分量矩阵。如前所述,由L个时延向量中的第l个时延向量b(τl)和Kl个角度向量中的第kl个角度向量 可以构造空频分量矩阵
可以构造空频分量矩阵 与第z个传输层对应的空频矩阵可以是P个空频分量矩阵的加权和。即,
与第z个传输层对应的空频矩阵可以是P个空频分量矩阵的加权和。即,
 表示基于第z个传输层反馈的由第l个时延向量及其对应的第kl个角度向量构成的角度时延对的加权系数。该空频矩阵的维度可以是T×N。
表示基于第z个传输层反馈的由第l个时延向量及其对应的第kl个角度向量构成的角度时延对的加权系数。该空频矩阵的维度可以是T×N。
需要说明的是,上文为方便理解,以发射天线的一个极化方向为例说明了确定与接收天线对应的空频矩阵的具体过程。但这不应对本申请构成任何限定。当发射天线的极化方向数大于1时,网络设备仍然可以基于如上所述的方法来确定与各接收天线对应的空频矩阵。
例如,极化方向数为2,与第r个接收天线对应的空频矩阵可以通过如下计算式确定:

其中, 表示基于第z个传输层反馈的第一极化方向上由第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数;
表示基于第z个传输层反馈的第一极化方向上由第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数; 表示基于第z个传输层反馈的第二极化方向上与第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数。
表示基于第z个传输层反馈的第二极化方向上与第k个角度向量及其对应的第lk个时延向量构成的角度时延对的加权系数。
可以理解的是,当K个角度向量中的任意两个角度向量对应相同的L个时延向量时,上述计算式中的下角标kl和Kl中的l可以省略。即,分别为 以及
以及
应理解,上文对于2个极化方向定义的空频矩阵 的计算式仅为示例,不应对本申请构成任何限定。例如,在不同的极化方向上加载的时延向量和/或角度向量的数量可以相同也可以不同,在不同的极化方向上加载是时延向量和/或角度向量可以相同,也可以不同。
的计算式仅为示例,不应对本申请构成任何限定。例如,在不同的极化方向上加载的时延向量和/或角度向量的数量可以相同也可以不同,在不同的极化方向上加载是时延向量和/或角度向量可以相同,也可以不同。
对于Z个传输层而言,网络设备可以分别基于每个传输层对应的P个加权系数确定与各传输层对应的空频矩阵 至
至 由此,网络设备可确定与各RB对应的预编码矩阵W(n)。
由此,网络设备可确定与各RB对应的预编码矩阵W(n)。
以N个RB中的第n个RB为例,网络设备可以首先确定与第n个RB对应的预编码矩阵W(n)的共轭(W(n))*。可以是由上述基于Z个传输层分别确定的Z个空频矩阵
 至
至 中每个空频矩阵中的第n个列向量构建。例如,将
中每个空频矩阵中的第n个列向量构建。例如,将 中的第n列作为下行信道矩阵(W(n))*的第一列,将
中的第n列作为下行信道矩阵(W(n))*的第一列,将 中的第n列作为下行信道矩阵(W(n))*的第二列;以此类推,可以将
中的第n列作为下行信道矩阵(W(n))*的第二列;以此类推,可以将 中的第n列作为下行信道矩阵(W(n))*的第z列。由此可以得到矩阵(W(n))*,进而可以确定与第n个RB对应的预编码矩阵W(n)。
中的第n列作为下行信道矩阵(W(n))*的第z列。由此可以得到矩阵(W(n))*,进而可以确定与第n个RB对应的预编码矩阵W(n)。
基于上述方法可以确定与各RB分别对应的预编码矩阵。应理解,上文仅为便于理解,以空频分量矩阵为例详细说明了网络设备确定预编码矩阵的具体过程。但这不应对本申请构成任何限定。网络设备也可以基于P个角度时延对确定P个空频分量向量,进而确定预编码矩阵。本领域的技术人员,基于P个角度时延对可以构造不同形式的P个空频基本单位,进而确定预编码矩阵。基于P个角度时延对而构造的不同形式的P个空频基本单位,进而基于P个空频基本单位的加权和来确定预编码矩阵的方式均应落入本申请要求的保护范围内。
还应理解,上文仅为示例,示出了网络设备根据第三指示信息确定预编码矩阵的可能实现方式,但这不应对本申请构成任何限定。本申请对于网络设备根据第五指示信息确定预编码矩阵的具体实现方式不作限定。本领域的技术人员基于相同的构思,对上文列举的矩阵运算进行变换或者等价的替换,确定预编码矩阵的方法均应落入本申请的保护范围内。
还应理解,上文中确定的预编码矩阵是与RB对应的预编码矩阵。这里,RB为频域单元的一例。与RB对应的预编码矩阵,可以是指,以RB为粒度基于该RB对应的信道矩阵确定的预编码矩阵,或者说,基于该RB上接收到的预编码参考信号确定的预编码矩阵,可用于对通过该RB传输的数据做预编码。与RB对应的下行信道,可以是指,基于该RB上接收到的预编码参考信号确定的下行信道,可用于确定与该RB对应的预编码矩阵。
当频域单元的粒度较大,如频域单元为子带、PRG或者PRB时,网络设备可以根据每个频域单元中各RB对应的预编码矩阵确定与频域单元的预编码矩阵。由于上文方法200中已经详细说明了网络设备根据每个频域单元中各RB对应的预编码矩阵确定与频域单元的预编码矩阵的具体方法,为了简洁,这里不再赘述。
还应理解,上文中在描述时提及的与某一角度向量和某一时延向量对应的加权系数,也就是,与某一角度向量和某一时延向量构成的角度时延对对应的加权系数。例如,与第k个角度向量和第l个时延向量对应的加权系数,也就是,与第k个角度向量和第l个时延向量构成的角度时延对对应的加权系数。为了简洁,这里不再一一举例说明。
在本申请实施例中,网络设备基于上行信道测量所确定的时延,对下行参考信号进行预编码,使得终端设备根据预编码后的参考信号进行下行信道测量。由于网络设备基于上下行信道可互易的时延对参考信号进行了预编码,终端设备可以不必反馈空域和频域的向量(如上述发射天线端口和时延向量),仅需反馈与角度时延对对应的加权系数,大大减小了终端设备的反馈开销。此外,通过利用上下行信道的互易性,将终端设备对下行信道的测量过程简化,降低了终端设备在信道测量过程中的计算复杂度。
应理解,本申请实施例中仅为便于理解,示出了空频矩阵由真实的信道的转置得到的情况下,下行信道测量并确定预编码矩阵的具体过程。但这不应对本申请构成任何限定。真实的信道与空频矩阵HDL的关系并不是固定不变的。对空频矩阵以及空频分量矩阵的不同定义,可能会使得真实的信道与空频矩阵HDL之间的关系发生变化。例如,空频矩阵HDL可以由真实的信道的转置得到,也可以由真实的信道的共轭转置得到。
当对空频矩阵与信道矩阵间的关系的定义不同时,在加载时延和角度时网络设备所执行的操作也有所不同,终端设备在进行信道测量并反馈时所执行的操作也相应地发生变化。但这只是终端设备和网络设备的实现行为,不应对本申请构成任何限定。本申请对于信道矩阵的定义、空频矩阵的维度及其定义以及二者间的转换关系不作限定。同理,本申请对于空频矩阵与预编码矩阵间的转换关系也不作限定。
还应理解,上述实施例中,各过程的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本申请实施例的实施过程构成任何限定。
以上,结合图2至图6详细说明了本申请实施例提供的指示和确定预编码向量的方法。以下,结合图7至图9详细说明本申请实施例提供的通信装置。
图7是本申请实施例提供的通信装置的示意性框图。如图所示,该通信装置1000可以包括通信单元1100和处理单元1200。
在一种可能的设计中,该通信装置1000可对应于上文方法实施例中的终端设备,例如,可以为终端设备,或者配置于终端设备中的芯片。
具体地,该通信装置1000可对应于根据本申请实施例的方法200或方法500中的终端设备,该通信装置1000可以包括用于执行图2中的方法200或图5中的方法500中的终端设备执行的方法的单元。并且,该通信装置1000中的各单元和上述其他操作和/或功能分别为了实现图2中的方法200或图5中的方法500的相应流程。
其中,当该通信装置1000用于执行图2中的方法200时,通信单元1100可用于执行方法200中的步骤210和步骤230,处理单元1200可用于执行方法200中的步骤220。
当该通信装置1000用于执行图5中的方法500时,通信单元1100可用于执行方法500中的步骤510和步骤530,处理单元1200可用于执行方法500中的步骤520。
应理解,各单元执行上述相应步骤的具体过程在上述方法实施例中已经详细说明,为了简洁,在此不再赘述。
还应理解,该通信装置1000为终端设备时,该通信装置1000中的通信单元1100可对应于图5中示出的终端设备2000中的收发器2020,该通信装置1000中的处理单元1200可对应于图5中示出的终端设备2000中的处理器2010。
还应理解,该通信装置1000为配置于终端设备中的芯片时,该通信装置1000中的通信单元1100可以为输入/输出接口。
在另一种可能的设计中,该通信装置1000可对应于上文方法实施例中的网络设备,例如,可以为网络设备,或者配置于网络设备中的芯片。
具体地,该通信装置1000可对应于根据本申请实施例的方法200或方法500中的网络设备,该通信装置1000可以包括用于执行图2中的方法200或图5中的方法500中的网络设备执行的方法的单元。并且,该通信装置1000中的各单元和上述其他操作和/或功能分别为了实现图2中的方法200或图5中的方法500的相应流程。
其中,当该通信装置1000用于执行图2中的方法200时,通信单元1100可用于执行方法200中的步骤210和步骤230,处理单元1200可用于执行方法200中的步骤240。
当该通信装置1000用于执行图5中的方法500时,通信单元1100可用于执行方法500中的步骤510和步骤530,处理单元1200可用于执行方法500中的步骤540。
还应理解,该通信装置1000为网络设备时,该通信装置1000中的通信单元为可对应于图7中示出的网络设备3000中的收发器3200,该通信装置1000中的处理单元1200可对应于图7中示出的网络设备3000中的处理器3100。
还应理解,该通信装置1000为配置于网络设备中的芯片时,该通信装置1000中的通信单元1100可以为输入/输出接口。
图8是本申请实施例提供的终端设备2000的结构示意图。该终端设备2000可应用于如图1所示的系统中,执行上述方法实施例中终端设备的功能。如图所示,该终端设备2000包括处理器2010和收发器2020。可选地,该终端设备2000还包括存储器2030。其中,处理器2010、收发器2002和存储器2030之间可以通过内部连接通路互相通信,传递控制和/或数据信号,该存储器2030用于存储计算机程序,该处理器2010用于从该存储器2030中调用并运行该计算机程序,以控制该收发器2020收发信号。可选地,终端设备2000还可以包括天线2040,用于将收发器2020输出的上行数据或上行控制信令通过无线信号发送出去。
上述处理器2010可以和存储器2030可以合成一个处理装置,处理器2010用于执行存储器2030中存储的程序代码来实现上述功能。具体实现时,该存储器2030也可以集成在处理器2010中,或者独立于处理器2010。该处理器2010可以与图7中的处理单元对应。
上述收发器2020可以与图7中的通信单元对应,也可以称为收发单元。收发器2020可以包括接收器(或称接收机、接收电路)和发射器(或称发射机、发射电路)。其中,接收器用于接收信号,发射器用于发射信号。
应理解,图8所示的终端设备2000能够实现图2或图5所示方法实施例中涉及终端设备的各个过程。终端设备2000中的各个模块的操作和/或功能,分别为了实现上述方法实施例中的相应流程。具体可参见上述方法实施例中的描述,为避免重复,此处适当省略详细描述。
上述处理器2010可以用于执行前面方法实施例中描述的由终端设备内部实现的动作,而收发器2020可以用于执行前面方法实施例中描述的终端设备向网络设备发送或从网络设备接收的动作。具体请见前面方法实施例中的描述,此处不再赘述。
可选地,上述终端设备2000还可以包括电源2050,用于给终端设备中的各种器件或电路提供电源。
除此之外,为了使得终端设备的功能更加完善,该终端设备2000还可以包括输入单元2060、显示单元2070、音频电路2080、摄像头2090和传感器2100等中的一个或多个,所述音频电路还可以包括扬声器2082、麦克风2084等。
图9是本申请实施例提供的网络设备的结构示意图,例如可以为基站的结构示意图。该基站3000可应用于如图1所示的系统中,执行上述方法实施例中网络设备的功能。如图所示,该基站3000可以包括一个或多个射频单元,如远端射频单元(remote radio unit,RRU)3100和一个或多个基带单元(BBU)(也可称为分布式单元(DU))3200。所述RRU 3100可以称为收发单元,与图7中的通信单元1200对应。可选地,该收发单元3100还可以称为收发机、收发电路、或者收发器等等,其可以包括至少一个天线3101和射频单元3102。可选地,收发单元3100可以包括接收单元和发送单元,接收单元可以对应于接收器(或称接收机、接收电路),发送单元可以对应于发射器(或称发射机、发射电路)。所述RRU 3100部分主要用于射频信号的收发以及射频信号与基带信号的转换,例如用于向终端设备发送指示信息。所述BBU 3200部分主要用于进行基带处理,对基站进行控制等。所述RRU 3100与BBU 3200可以是物理上设置在一起,也可以物理上分离设置的,即分布式基站。
所述BBU 3200为基站的控制中心,也可以称为处理单元,可以与图7中的处理单元1100对应,主要用于完成基带处理功能,如信道编码,复用,调制,扩频等等。例如所述BBU(处理单元)可以用于控制基站执行上述方法实施例中关于网络设备的操作流程,例如,生成上述指示信息等。
在一个示例中,所述BBU 3200可以由一个或多个单板构成,多个单板可以共同支持单一接入制式的无线接入网(如LTE网),也可以分别支持不同接入制式的无线接入网(如LTE网,5G网或其他网)。所述BBU 3200还包括存储器3201和处理器3202。所述存储器3201用以存储必要的指令和数据。所述处理器3202用于控制基站进行必要的动作,例如用于控制基站执行上述方法实施例中关于网络设备的操作流程。所述存储器3201和处理器3202可以服务于一个或多个单板。也就是说,可以每个单板上单独设置存储器和处理器。也可以是多个单板共用相同的存储器和处理器。此外每个单板上还可以设置有必要的电路。
应理解,图9所示的基站3000能够实现图2或图5的方法实施例中涉及网络设备的各个过程。基站3000中的各个模块的操作和/或功能,分别为了实现上述方法实施例中的相应流程。具体可参见上述方法实施例中的描述,为避免重复,此处适当省略详细描述。
上述BBU 3200可以用于执行前面方法实施例中描述的由网络设备内部实现的动作,而RRU 3100可以用于执行前面方法实施例中描述的网络设备向终端设备发送或从终端设备接收的动作。具体请见前面方法实施例中的描述,此处不再赘述。
本申请实施例还提供了一种处理装置,包括处理器和接口;所述处理器用于执行上述任一方法实施例中的通信的方法。
应理解,上述处理装置可以是一个芯片。例如,该处理装置可以是现场可编程门阵列(field programmable gate array,FPGA),可以是专用集成芯片(applicationspecific integrated circuit,ASIC),还可以是系统芯片(system on chip,SoC),还可以是中央处理器(central processor unit,CPU),还可以是网络处理器(networkprocessor,NP),还可以是数字信号处理电路(digital signal processor,DSP),还可以是微控制器(micro controller unit,MCU),还可以是可编程控制器(programmable logicdevice,PLD)或其他集成芯片。
在实现过程中,上述方法的各步骤可以通过处理器中的硬件的集成逻辑电路或者软件形式的指令完成。结合本申请实施例所公开的方法的步骤可以直接体现为硬件处理器执行完成,或者用处理器中的硬件及软件模块组合执行完成。软件模块可以位于随机存储器,闪存、只读存储器,可编程只读存储器或者电可擦写可编程存储器、寄存器等本领域成熟的存储介质中。该存储介质位于存储器,处理器读取存储器中的信息,结合其硬件完成上述方法的步骤。为避免重复,这里不再详细描述。
应注意,本申请实施例中的处理器可以是一种集成电路芯片,具有信号的处理能力。在实现过程中,上述方法实施例的各步骤可以通过处理器中的硬件的集成逻辑电路或者软件形式的指令完成。上述的处理器可以是通用处理器、数字信号处理器(DSP)、专用集成电路(ASIC)、现场可编程门阵列(FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。可以实现或者执行本申请实施例中的公开的各方法、步骤及逻辑框图。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。结合本申请实施例所公开的方法的步骤可以直接体现为硬件译码处理器执行完成,或者用译码处理器中的硬件及软件模块组合执行完成。软件模块可以位于随机存储器,闪存、只读存储器,可编程只读存储器或者电可擦写可编程存储器、寄存器等本领域成熟的存储介质中。该存储介质位于存储器,处理器读取存储器中的信息,结合其硬件完成上述方法的步骤。
可以理解,本申请实施例中的存储器可以是易失性存储器或非易失性存储器,或可包括易失性和非易失性存储器两者。其中,非易失性存储器可以是只读存储器(read-only memory,ROM)、可编程只读存储器(programmable ROM,PROM)、可擦除可编程只读存储器(erasable PROM,EPROM)、电可擦除可编程只读存储器(electrically EPROM,EEPROM)或闪存。易失性存储器可以是随机存取存储器(random access memory,RAM),其用作外部高速缓存。通过示例性但不是限制性说明,许多形式的RAM可用,例如静态随机存取存储器(static RAM,SRAM)、动态随机存取存储器(dynamic RAM,DRAM)、同步动态随机存取存储器(synchronous DRAM,SDRAM)、双倍数据速率同步动态随机存取存储器(double data rateSDRAM,DDR SDRAM)、增强型同步动态随机存取存储器(enhanced SDRAM,ESDRAM)、同步连接动态随机存取存储器(synchlink DRAM,SLDRAM)和直接内存总线随机存取存储器(directrambus RAM,DR RAM)。应注意,本文描述的系统和方法的存储器旨在包括但不限于这些和任意其它适合类型的存储器。
根据本申请实施例提供的方法,本申请还提供一种计算机程序产品,该计算机程序产品包括:计算机程序代码,当该计算机程序代码在计算机上运行时,使得该计算机执行图2和图5所示实施例中任意一个实施例的方法。
根据本申请实施例提供的方法,本申请还提供一种计算机可读介质,该计算机可读介质存储有程序代码,当该程序代码在计算机上运行时,使得该计算机执行图2和图5所示实施例中任意一个实施例的方法。
根据本申请实施例提供的方法,本申请还提供一种系统,其包括前述的一个或多个终端设备以及一个或多个网络设备。
在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。所述计算机程序产品包括一个或多个计算机指令。在计算机上加载和执行所述计算机指令时,全部或部分地产生按照本申请实施例所述的流程或功能。所述计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。所述计算机指令可以存储在计算机可读存储介质中,或者从一个计算机可读存储介质向另一个计算机可读存储介质传输,例如,所述计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如同轴电缆、光纤、数字用户线(digital subscriber line,DSL))或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输。所述计算机可读存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储设备。所述可用介质可以是磁性介质(例如,软盘、硬盘、磁带)、光介质(例如,高密度数字视频光盘(digital video disc,DVD))、或者半导体介质(例如,固态硬盘(solid state disc,SSD))等。
上述各个装置实施例中网络设备与终端设备和方法实施例中的网络设备或终端设备完全对应,由相应的模块或单元执行相应的步骤,例如通信单元(收发器)执行方法实施例中接收或发送的步骤,除发送、接收外的其它步骤可以由处理单元(处理器)执行。具体单元的功能可以参考相应的方法实施例。其中,处理器可以为一个或多个。
在本说明书中使用的术语“部件”、“模块”、“系统”等用于表示计算机相关的实体、硬件、固件、硬件和软件的组合、软件、或执行中的软件。例如,部件可以是但不限于,在处理器上运行的进程、处理器、对象、可执行文件、执行线程、程序和/或计算机。通过图示,在计算设备上运行的应用和计算设备都可以是部件。一个或多个部件可驻留在进程和/或执行线程中,部件可位于一个计算机上和/或分布在2个或更多个计算机之间。此外,这些部件可从在上面存储有各种数据结构的各种计算机可读介质执行。部件可例如根据具有一个或多个数据分组(例如来自与本地系统、分布式系统和/或网络间的另一部件交互的二个部件的数据,例如通过信号与其它系统交互的互联网)的信号通过本地和/或远程进程来通信。
本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本申请的范围。
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统、装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
在本申请所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
另外,在本申请各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。
所述功能如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本申请的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本申请各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:U盘、移动硬盘、只读存储器(read-only memory,ROM)、随机存取存储器(random access memory,RAM)、磁碟或者光盘等各种可以存储程序代码的介质。
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以所述权利要求的保护范围为准。
Claims (24)
1.一种信道测量方法,其特征在于,包括:
接收预编码参考信号,所述预编码参考信号是基于K个角度向量对参考信号预编码得到;
生成第一指示信息,所述第一指示信息用于指示至少一个时延向量以及对应于P个角度时延对的P个加权系数,所述至少一个时延向量和所述P个加权系数由所述预编码参考信号确定;其中,所述P个角度时延对中的每个角度时延对包括所述K个角度向量中的一个角度向量和所述至少一个时延向量中的一个时延向量,所述P个角度时延对及其对应的P个加权系数用于确定预编码矩阵;P和K均为正整数;
发送所述第一指示信息。
2.如权利要求1所述的方法,其特征在于,所述至少一个时延向量包括针对所述K个角度向量中的每个角度向量反馈的一个或多个时延向量;其中,针对所述K个角度向量中的第k个角度向量,所述第一指示信息用于指示Lk个时延向量,所述第k个角度向量和所述Lk个时延向量用于确定所述P个角度时延对中的Lk个角度时延对;Lk≥1,且Lk为整数。
3.如权利要求1或2所述的方法,其特征在于,所述方法还包括:
接收第二指示信息,所述第二指示信息用于指示针对所述K个角度向量中的每个角度向量反馈的时延向量的个数。
4.如权利要求1或2所述的方法,其特征在于,所述方法还包括:
发送第二指示信息,所述第二指示信息用于指示针对所述K个角度向量中的每个角度向量反馈的时延向量的个数。
5.一种信道测量方法,其特征在于,包括:
发送预编码参考信号,所述预编码参考信号是基于K个角度向量对参考信号预编码得到;
接收第一指示信息,所述第一指示信息用于指示至少一个时延向量以及对应于P个角度时延对的P个加权系数,所述至少一个时延向量和所述P个加权系数由所述预编码参考信号确定;其中,所述P个角度时延对中的每个角度时延对包括所述K个角度向量中的一个角度向量和所述至少一个时延向量中的一个时延向量,所述P个角度时延对及其对应的P个加权系数用于确定预编码矩阵;P和K均为正整数;
根据所述第一指示信息确定预编码矩阵。
6.如权利要求5所述的方法,其特征在于,所述至少一个时延向量包括针对所述K个角度向量中的每个角度向量反馈的一个或多个时延向量;其中,针对所述K个角度向量中的第k个角度向量,所述第一指示信息用于指示Lk个时延向量,所述第k个角度向量和所述Lk个时延向量用于确定所述P个角度时延对中的Lk个角度时延对;Lk≥1,且Lk为整数。
7.如权利要求5或6所述的方法,其特征在于,所述方法还包括:
发送第二指示信息,所述第二指示信息用于指示针对所述K个角度向量中的每个角度向量反馈的时延向量的个数。
8.如权利要求5或6所述的方法,其特征在于,所述方法还包括:
接收第二指示信息,所述第二指示信息用于指示针对所述K个角度向量中的每个角度向量反馈的时延向量的个数。
9.如权利要求1、2、5或6中任一项所述的方法,其特征在于,针对所述K个角度向量中的每个角度向量反馈的时延向量的个数为预定义值。
10.如权利要求1至9中任一项所述的方法,其特征在于,针对所述K个角度向量中的第一角度向量反馈的时延向量与第二角度向量反馈的时延向量相同,所述第一角度向量和所述第二角度向量为所述K个角度向量中的任意两个角度向量;所述第一指示信息用于指示L个时延向量;L≥1,且L为整数。
11.如权利要求1至10中任一项所述的方法,其特征在于,所述P个加权系数包括针对所述K个角度向量中的每个角度向量反馈的一个或多个加权系数;其中,针对所述K个角度向量中的第k个角度向量,所述第一指示信息用于指示Lk个加权系数,所述Lk个加权系数与所述P个角度时延对中的Lk个角度时延对对应,且所述Lk个角度时延对中的每个角度时延对包括所述第k个角度向量及其对应的所述Lk个时延向量中的一个时延向量;Lk≥1,且Lk为整数。
12.如权利要求1至11中任一项所述的方法,其特征在于,所述K个角度向量基于上行信道测量确定。
13.如权利要求1至12中任一项所述的方法,其特征在于,所述P个加权系数对应于一个接收天线或一个传输层。
14.一种通信装置,其特征在于,包括:
通信单元,用于接收预编码参考信号,所述预编码参考信号是基于K个角度向量对参考信号预编码得到;
处理单元,用于生成第一指示信息,所述第一指示信息用于指示至少一个时延向量以及对应于P个角度时延对的P个加权系数,所述至少一个时延向量和所述P个加权系数由所述预编码参考信号确定;其中,所述P个角度时延对中的每个角度时延对包括所述K个角度向量中的一个角度向量和所述至少一个时延向量中的一个时延向量,所述P个角度时延对及其对应的P个加权系数用于确定预编码矩阵;P和K均为正整数;
所述通信单元还用于发送所述第一指示信息。
15.一种通信装置,其特征在于,包括:
通信单元,用于发送预编码参考信号,所述预编码参考信号是基于K个角度向量对参考信号预编码得到;并用于接收第一指示信息,所述第一指示信息用于指示至少一个时延向量以及对应于P个角度时延对的P个加权系数,所述至少一个时延向量和所述P个加权系数由所述预编码参考信号确定;其中,所述P个角度时延对中的每个角度时延对包括所述K个角度向量中的一个角度向量和所述至少一个时延向量中的一个时延向量,所述P个角度时延对及其对应的P个加权系数用于确定预编码矩阵;P和K均为正整数;
处理单元,用于根据所述第一指示信息确定所述预编码矩阵。
16.如权利要求14或15所述的装置,其特征在于,所述至少一个时延向量包括针对所述K个角度向量中的每个角度向量反馈的一个或多个时延向量;其中,针对所述K个角度向量中的第k个角度向量,所述第一指示信息用于指示Lk个时延向量,所述第k个角度向量和所述Lk个时延向量用于确定所述P个角度时延对中的Lk个角度时延对;Lk≥1,且Lk为整数。
17.如权利要求14至16中任一项所述的装置,其特征在于,所述通信单元还用于接收第二指示信息,所述第二指示信息用于指示针对所述K个角度向量中的每个角度向量反馈的时延向量的个数。
18.如权利要求14至16中任一项所述的装置,其特征在于,所述通信单元还用于发送第二指示信息,所述第二指示信息用于指示针对所述K个角度向量中的每个角度向量反馈的时延向量的个数。
19.如权利要求14至16中任一项所述的装置,其特征在于,针对所述K个角度向量中的每个角度向量反馈的时延向量的个数为预定义值。
20.如权利要求14至19中任一项所述的装置,其特征在于,针对所述K个角度向量中的第一角度向量反馈的时延向量与第二角度向量反馈的时延向量相同,所述第一角度向量和所述第二角度向量为所述K个角度向量中的任意两个角度向量;所述第一指示信息用于指示L个时延向量;L≥1,且L为整数。
21.如权利要求14至20中任一项所述的装置,其特征在于,所述K个角度向量基于上行信道测量确定。
22.如权利要求14至21中任一项所述的装置,其特征在于,所述P个加权系数对应于一个接收天线或一个传输层。
23.一种通信装置,包括至少一个处理器,所述至少一个处理器用于执行如权利要求1至13中任一项所述的方法。
24.一种计算机可读介质,其特征在于,包括计算机程序,当所述计算机程序在计算机上运行时,使得所述计算机执行如权利要求1至13中任一项所述的方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811550128.XA CN111342873B (zh) | 2018-12-18 | 2018-12-18 | 一种信道测量方法和通信装置 |
| EP19900807.9A EP3886335A4 (en) | 2018-12-18 | 2019-12-12 | CHANNEL MEASUREMENT METHOD AND COMMUNICATION DEVICE |
| PCT/CN2019/124792 WO2020125534A1 (zh) | 2018-12-18 | 2019-12-12 | 一种信道测量方法和通信装置 |
| US17/347,850 US11411623B2 (en) | 2018-12-18 | 2021-06-15 | Channel measurement method and communications apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811550128.XA CN111342873B (zh) | 2018-12-18 | 2018-12-18 | 一种信道测量方法和通信装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111342873A true CN111342873A (zh) | 2020-06-26 |
| CN111342873B CN111342873B (zh) | 2021-11-30 |
Family
ID=71101060
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811550128.XA Active CN111342873B (zh) | 2018-12-18 | 2018-12-18 | 一种信道测量方法和通信装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11411623B2 (zh) |
| EP (1) | EP3886335A4 (zh) |
| CN (1) | CN111342873B (zh) |
| WO (1) | WO2020125534A1 (zh) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022021443A1 (zh) * | 2020-07-31 | 2022-02-03 | 华为技术有限公司 | 一种预编码方法及装置 |
| WO2022022331A1 (zh) * | 2020-07-27 | 2022-02-03 | 华为技术有限公司 | 获取信道参数的方法及装置 |
| WO2022048593A1 (zh) * | 2020-09-02 | 2022-03-10 | 华为技术有限公司 | 信道测量的方法和装置 |
| WO2022067824A1 (zh) * | 2020-09-30 | 2022-04-07 | 华为技术有限公司 | 信号传输方法及相关装置 |
| WO2022151458A1 (zh) * | 2021-01-17 | 2022-07-21 | 华为技术有限公司 | 信道信息获取方法及相关设备 |
| CN115189732A (zh) * | 2022-04-08 | 2022-10-14 | 网络通信与安全紫金山实验室 | 预编码矩阵的估计方法及装置 |
| WO2023131256A1 (zh) * | 2022-01-06 | 2023-07-13 | 维沃移动通信有限公司 | 信道测量方法、终端及网络侧设备 |
| WO2023184326A1 (en) * | 2022-03-31 | 2023-10-05 | Qualcomm Incorporated | Resource grouping information indication for time-domain channel reporting and resource selection |
| US11943014B2 (en) | 2019-06-06 | 2024-03-26 | Huawei Technologies Co., Ltd. | Channel measurement method and communications apparatus |
| WO2024138429A1 (en) * | 2022-12-28 | 2024-07-04 | Zte Corporation | Precoding matrix determination for near-field and far-field transmissions |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11799710B2 (en) * | 2020-12-10 | 2023-10-24 | Qualcomm Incorporated | Techniques for signaling a source of dominant noise at a user equipment |
| CN115085876A (zh) * | 2021-03-10 | 2022-09-20 | 华为技术有限公司 | 确定信道质量指示的方法及装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107370558A (zh) * | 2016-05-13 | 2017-11-21 | 北京华为数字技术有限公司 | 一种信道信息发送方法、数据发送方法和设备 |
| CN107534533A (zh) * | 2015-05-22 | 2018-01-02 | 富士通株式会社 | 参考信号的资源配置方法、装置以及通信系统 |
| CN107733485A (zh) * | 2016-08-12 | 2018-02-23 | 中兴通讯股份有限公司 | 信道状态信息的反馈方法及装置 |
| US20180069680A1 (en) * | 2013-02-28 | 2018-03-08 | Samsung Electronics Co., Ltd. | Method and apparatus for transmitting and receiving feedback information in mobile communication system using multiple antennas |
| CN108631891A (zh) * | 2017-03-24 | 2018-10-09 | 中兴通讯股份有限公司 | 通信节点间链路的测量方法及装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8942302B2 (en) * | 2012-12-20 | 2015-01-27 | Google Technology Holdings LLC | Method and apparatus for antenna array channel feedback |
| US10659118B2 (en) * | 2016-04-19 | 2020-05-19 | Samsung Electronics Co., Ltd. | Method and apparatus for explicit CSI reporting in advanced wireless communication systems |
| CN107733603B (zh) * | 2016-08-12 | 2022-03-01 | 中兴通讯股份有限公司 | 导频发送方法及装置 |
| CN108809372B (zh) * | 2017-04-26 | 2021-05-11 | 华为技术有限公司 | 一种指示及确定预编码向量的方法和设备 |
| CN110035450B (zh) * | 2018-01-12 | 2020-06-23 | 维沃移动通信有限公司 | 测量上报的方法、终端设备和网络设备 |
-
2018
- 2018-12-18 CN CN201811550128.XA patent/CN111342873B/zh active Active
-
2019
- 2019-12-12 WO PCT/CN2019/124792 patent/WO2020125534A1/zh unknown
- 2019-12-12 EP EP19900807.9A patent/EP3886335A4/en active Pending
-
2021
- 2021-06-15 US US17/347,850 patent/US11411623B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20180069680A1 (en) * | 2013-02-28 | 2018-03-08 | Samsung Electronics Co., Ltd. | Method and apparatus for transmitting and receiving feedback information in mobile communication system using multiple antennas |
| CN107534533A (zh) * | 2015-05-22 | 2018-01-02 | 富士通株式会社 | 参考信号的资源配置方法、装置以及通信系统 |
| CN107370558A (zh) * | 2016-05-13 | 2017-11-21 | 北京华为数字技术有限公司 | 一种信道信息发送方法、数据发送方法和设备 |
| CN107733485A (zh) * | 2016-08-12 | 2018-02-23 | 中兴通讯股份有限公司 | 信道状态信息的反馈方法及装置 |
| CN108631891A (zh) * | 2017-03-24 | 2018-10-09 | 中兴通讯股份有限公司 | 通信节点间链路的测量方法及装置 |
Non-Patent Citations (1)
| Title |
|---|
| HUAWEI, HISILICON: "Discussion on CSI enhancement", 《3GPP TSG RAN WG1 MEETING #95 R1-1812242》 * |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11943014B2 (en) | 2019-06-06 | 2024-03-26 | Huawei Technologies Co., Ltd. | Channel measurement method and communications apparatus |
| WO2022022331A1 (zh) * | 2020-07-27 | 2022-02-03 | 华为技术有限公司 | 获取信道参数的方法及装置 |
| WO2022021443A1 (zh) * | 2020-07-31 | 2022-02-03 | 华为技术有限公司 | 一种预编码方法及装置 |
| WO2022048593A1 (zh) * | 2020-09-02 | 2022-03-10 | 华为技术有限公司 | 信道测量的方法和装置 |
| WO2022067824A1 (zh) * | 2020-09-30 | 2022-04-07 | 华为技术有限公司 | 信号传输方法及相关装置 |
| WO2022151458A1 (zh) * | 2021-01-17 | 2022-07-21 | 华为技术有限公司 | 信道信息获取方法及相关设备 |
| WO2023131256A1 (zh) * | 2022-01-06 | 2023-07-13 | 维沃移动通信有限公司 | 信道测量方法、终端及网络侧设备 |
| WO2023184326A1 (en) * | 2022-03-31 | 2023-10-05 | Qualcomm Incorporated | Resource grouping information indication for time-domain channel reporting and resource selection |
| CN115189732A (zh) * | 2022-04-08 | 2022-10-14 | 网络通信与安全紫金山实验室 | 预编码矩阵的估计方法及装置 |
| CN115189732B (zh) * | 2022-04-08 | 2024-05-28 | 网络通信与安全紫金山实验室 | 预编码矩阵的估计方法及装置 |
| WO2024138429A1 (en) * | 2022-12-28 | 2024-07-04 | Zte Corporation | Precoding matrix determination for near-field and far-field transmissions |
Also Published As
| Publication number | Publication date |
|---|---|
| US11411623B2 (en) | 2022-08-09 |
| WO2020125534A1 (zh) | 2020-06-25 |
| EP3886335A1 (en) | 2021-09-29 |
| US20210314034A1 (en) | 2021-10-07 |
| EP3886335A4 (en) | 2022-01-05 |
| CN111342873B (zh) | 2021-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111342912B (zh) | 一种信道测量方法和通信装置 | |
| CN111342873B (zh) | 一种信道测量方法和通信装置 | |
| CN112054825B (zh) | 一种信道测量方法和通信装置 | |
| CN111342913B (zh) | 一种信道测量方法和通信装置 | |
| CN111756415B (zh) | 通信方法及装置 | |
| JP7238167B2 (ja) | プリコーディング行列表示及び決定方法、及び通信装置 | |
| CN111865372B (zh) | 一种用于构建预编码矩阵的系数指示方法和通信装置 | |
| US11943014B2 (en) | Channel measurement method and communications apparatus | |
| CN112533295B (zh) | 参数配置方法和通信装置 | |
| CN111435848B (zh) | 指示和确定预编码向量的方法以及通信装置 | |
| CN111435850B (zh) | 用于构建预编码向量的向量指示方法和通信装置 | |
| CN114600384A (zh) | 一种信道测量方法和通信装置 | |
| CN111835390A (zh) | 一种信道测量方法和通信装置 | |
| CN111756422A (zh) | 指示信道状态信息的方法以及通信装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |