CN110546862B - 汇流条单元及具有该汇流条单元的马达 - Google Patents
汇流条单元及具有该汇流条单元的马达 Download PDFInfo
- Publication number
- CN110546862B CN110546862B CN201880022827.9A CN201880022827A CN110546862B CN 110546862 B CN110546862 B CN 110546862B CN 201880022827 A CN201880022827 A CN 201880022827A CN 110546862 B CN110546862 B CN 110546862B
- Authority
- CN
- China
- Prior art keywords
- bus bar
- phase
- coil
- neutral point
- holder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/22—Auxiliary parts of casings not covered by groups H02K5/06-H02K5/20, e.g. shaped to form connection boxes or terminal boxes
- H02K5/225—Terminal boxes or connection arrangements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/46—Fastening of windings on the stator or rotor structure
- H02K3/50—Fastening of winding heads, equalising connectors, or connections thereto
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/25—Devices for sensing temperature, or actuated thereby
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/46—Fastening of windings on the stator or rotor structure
- H02K3/52—Fastening salient pole windings or connections thereto
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/46—Fastening of windings on the stator or rotor structure
- H02K3/52—Fastening salient pole windings or connections thereto
- H02K3/521—Fastening salient pole windings or connections thereto applicable to stators only
- H02K3/522—Fastening salient pole windings or connections thereto applicable to stators only for generally annular cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/22—Auxiliary parts of casings not covered by groups H02K5/06-H02K5/20, e.g. shaped to form connection boxes or terminal boxes
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2203/00—Specific aspects not provided for in the other groups of this subclass relating to the windings
- H02K2203/09—Machines characterised by wiring elements other than wires, e.g. bus rings, for connecting the winding terminations
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Insulation, Fastening Of Motor, Generator Windings (AREA)
Abstract
相用汇流条单元(汇流条单元)具有:绝缘体的汇流条保持架,其对马达的相用的多个汇流条进行支承,该马达以中心轴线为中心进行旋转;以及绝缘体的汇流条罩,其覆盖各所述汇流条的至少轴向一侧并固定在所述汇流条保持架上。各所述汇流条具有:基部;多个延伸设置部,它们从所述基部向径向外侧延伸;以及端子,其设置在各所述延伸设置部的径向外端部。所述汇流条罩具有向轴向另一侧突出的多个突出部,多个所述突出部与各所述汇流条接触,并且至少一个所述突出部与所述延伸设置部的附近的所述基部接触。
Description
技术领域
本发明涉及汇流条单元及具有该汇流条单元的马达。
背景技术
在专利文献1中公开了以往的马达。该马达具有定子和转子。定子具有以上下延伸的中心轴线为中心的环状的定子铁芯。在定子铁芯的径向内侧形成有多个相对于中心轴线沿径向延伸的齿部。通过在齿部上卷绕金属制的线材而形成线圈。转子具有在径向上与定子对置配置的永久磁铁,并且转子以中心轴线为中心进行旋转。
另外,在线圈的轴向上方设置有布置部件。布置部件具有主体部和盖体。主体部具有多个槽,从线圈引出的线材被嵌入到槽中。盖体以覆盖主体部的槽的方式固定在主体部上。另外,盖体具有对嵌入于主体部的槽中的线材进行按压的按压突起。按压突起以与主体部的槽的位置一致的方式从盖体的主体部侧的面突出而形成。通过按压突起对嵌入于主体部的槽中的线材进行按压固定。
在专利文献2中公开了具有汇流条单元的马达。该汇流条单元具有汇流条基座及多个汇流条。汇流条基座具有相对于马达的中心轴线沿周向延伸的多个环状槽,多个环状槽沿径向排列。多个汇流条配置在汇流条基座的环状槽内。在汇流条上设置有向汇流条基座的径向外侧突出设置的线圈连接部以及向轴向上方突出设置的各相端子。在线圈连接部上连接有马达的定子的线圈,在各相端子上连接有外部布线。
现有技术文献
专利文献
专利文献1:日本特开2016-28542号公报
专利文献2:日本特开2015-100267号公报
发明内容
发明要解决的课题
但是,在将上述专利文献1的布置部件的盖体用于专利文献2的汇流条单元的情况下,根据盖体的按压突起与各汇流条接触的位置,在汇流条中,线圈连接部及各相端子的附近部分有可能浮起,从而产生线圈连接部及各相端子的晃动。因此,存在线圈连接部与线圈的连接以及各相端子与外部布线的连接不良,汇流条单元的可靠性降低的问题。
本发明的目的在于提供能够提高可靠性的汇流条单元以及具有该汇流条单元的马达。
用于解决课题的手段
本发明的例示的汇流条单元具有:绝缘体的汇流条保持架,其对马达的相用的多个汇流条进行支承,该马达以中心轴线为中心进行旋转;以及绝缘体的汇流条罩,其覆盖各所述汇流条的至少轴向一侧并固定在所述汇流条保持架上,其中,各所述汇流条具有:基部;多个延伸设置部,它们从所述基部向径向外侧延伸;以及端子,其设置在各所述延伸设置部的径向外端部,所述汇流条罩具有向轴向另一侧突出的多个突出部,多个所述突出部与各所述汇流条接触,并且至少一个所述突出部与所述延伸设置部的附近的所述基部接触。
本发明的例示的马达具有:上述结构的汇流条单元;定子;以及转子,其以所述中心轴线为中心进行旋转,具有在径向上与所述定子对置的磁铁。
发明效果
根据例示的本发明,可以提供能够提高可靠性的汇流条单元以及具有该汇流条单元的马达。
附图说明
图1是示出本发明的实施方式的马达的侧面剖视图。
图2是示出本发明的实施方式的马达的线圈与中性点汇流条的位置关系的俯视概略图。
图3是示出本发明的实施方式的马达的电路结构的图。
图4是从轴向一侧观察本发明的实施方式的马达的相用汇流条单元的立体图。
图5是从轴向一侧观察本发明的实施方式的马达的相用汇流条单元的俯视图。
图6是从轴向一侧观察将本发明的实施方式的马达的相用汇流条单元的相用汇流条罩卸下后的状态的俯视图。
图7是沿图5的A-A线的剖视图。
图8是示出本发明的实施方式的马达的相用汇流条单元的相用汇流条罩和相用汇流条保持架固定后的状态的侧面剖视图。
图9是从轴向另一侧观察本发明的实施方式的马达的相用汇流条单元的相用汇流条罩的立体图。
图10是从轴向另一侧观察本发明的实施方式的马达的相用汇流条单元的相用汇流条罩的俯视图。
图11是示出本发明的实施方式的马达的定子及中性点汇流条单元的立体图。
图12是本发明的实施方式的马达的中性点汇流条单元的沿周向的剖视图。
图13是示出本发明的实施方式的变形例的马达的中性点汇流条单元的立体图。
图14是示出本发明的实施方式的变形例的马达的中性点汇流条单元的俯视图。
具体实施方式
以下,参照附图对本发明的例示的实施方式进行详细说明。另外,在本说明书中,在马达1中,将与马达1的中心轴线C平行的方向称为“轴向”,将与中心轴线C垂直的方向称为“径向”,将沿着以中心轴线C为中心的圆弧的方向称为“周向”。另外,在本说明书中,“平行的方向”也包含大致平行的方向。另外,在本说明书中,“垂直的方向”也包含大致垂直的方向。
另外,在马达1中,有时以轴向为上下方向并且相对于定子22以中性点汇流条单元23侧为上来说明各部分的形状和位置关系。上下方向只是为了说明而使用的名称,并不限定实际的位置关系和方向。
<马达的整体结构>
图1是本发明的实施方式的马达的侧面剖视图。本实施方式的马达1例如搭载在汽车上,用于产生助力转向的驱动力。另外,马达1也可以用于助力转向以外的用途。例如,马达1也可以用作汽车的其他部位例如发动机冷却用风扇或油泵的驱动源。另外,马达1也可以搭载在家电产品、OA设备、医疗设备等上,产生各种驱动力。
马达1具有静止部2和旋转部3。静止部2固定在作为驱动对象的设备的框体上。旋转部3被支承为能够相对于静止部2以沿上下延伸的中心轴线C为中心进行旋转。
静止部2具有壳体21、定子22、中性点汇流条单元23、相用汇流条单元24(汇流条单元)、第1轴承25及第2轴承26。
壳体21具有筒部211、第1盖部212及第2盖部213。筒部211在轴向上呈大致圆筒状延伸。筒部211在径向内侧收纳定子22及后述的转子32。第2盖部213在比定子22靠轴向一侧(在图1中为下侧)的位置从筒部211朝向径向内侧扩展。第1盖部212在比定子22及中性点汇流条单元23靠轴向另一侧(在图1中为上侧)的位置从筒部211朝向径向内侧扩展。另外,第1盖部212及第2盖部213也可以具有从筒部211向径向外侧扩展的凸缘部(未图示)。
筒部211、第1盖部212及第2盖部213例如由铝或不锈钢等金属构成。在本实施方式中,筒部211和第1盖部212由单一部件构成,第2盖部213由其他部件构成。但是,也可以是,筒部211和第2盖部213由单一部件构成,第1盖部212由其他部件构成。另外,筒部211、第1盖部212以及第2盖部213也可以分别由分体部件构成。
定子22是配置在后述的转子32的径向外侧的电枢。定子22具有定子铁芯41、绝缘件42及多个线圈43。
定子铁芯41由沿轴向层叠有电磁钢板的层叠钢板构成。定子铁芯41具有以中心轴线C为中心的圆环状的铁芯背部411和从铁芯背部411向径向内侧延伸的多个齿412。铁芯背部411与中心轴线C大致同轴地配置。铁芯背部411的外周面固定在壳体21的筒部211的内周面上。多个齿412在周向上大致等间隔地配置,以中心轴线C为中心呈放射状延伸。各齿412在径向内端具有沿周向突出的伞部412a。在本实施方式中,齿412设置有9个,但齿412的数量只要是多个即可。
绝缘件42由作为绝缘体的树脂构成,覆盖各齿412的轴向的两端面及周向的两端面。线圈43由卷绕在绝缘件42的周围的导线构成。即,绝缘件42介于齿412与线圈43之间,从而能够防止齿412与线圈43的短路。另外,也可以代替绝缘件42而对齿412的表面实施绝缘涂装。
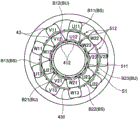
另外,在本实施方式中,如图2所示,在一个齿412的周围配置有一对线圈43,一对线圈43沿径向排列。由此,一对线圈43配置在马达1的周向上的9处。即,定子铁芯41具有9个齿412,马达1的槽数为9个。
各线圈43具有两根引出线430,一根引出线430与后述的中性点汇流条51连接,另一根引出线430与后述的相用汇流条53(汇流条)连接。另外,“引出线430”是构成线圈43的导线的端部。
如图2所示,18个线圈43是第1U相线圈U11、U12、U13、第1V相线圈V11、V12、V13、第1W相线圈W11、W12、W13、第2U相线圈U21、U22、U23、第2V相线圈V21、V22、V23以及第2W相线圈W21、W22、W23。
在图2中,按照第1U相线圈U12、第1V相线圈V12、第1W相线圈W12、第2U相线圈U21、第2V相线圈V21、第2W相线圈W21、第2U相线圈U23、第2V相线圈V23、第2W相线圈W23的顺序绕逆时针配置在各个齿412的径向内端部侧。
另外,在图2中,按照第1U相线圈U11、第1V相线圈V11、第1W相线圈W11、第1U相线圈U13、第1V相线圈V13、第1W相线圈W13、第2U相线圈U22、第2V相线圈V22、第2W相线圈W22的顺序绕逆时针配置在各个齿412的径向外端部侧。此时,第1U相线圈U11、U12配置在相同的齿412上。
如图1所示,第1轴承25及第2轴承26配置在壳体21与旋转部3的轴31之间。由此,第1轴承25及第2轴承26将轴31支承为能够相对于壳体21旋转。第1轴承25和第2轴承26使用隔着球体使外圈与内圈相对旋转的球轴承。另外,第1轴承25及第2轴承26也可以使用滑动轴承或流体轴承等其他方式的轴承来代替球轴承。
第1轴承25配置在比转子32及线圈43靠轴向另一侧的位置。在第1盖部212的中央部设置有收纳第1轴承25的第1轴承收纳部214。第1轴承收纳部214是沿着中心轴线C延伸的圆筒状的部位。第1轴承25的外圈固定在第1轴承收纳部214的内周面上。
第2轴承26配置在比转子32及线圈43靠轴向一侧的位置。在第2盖部213的中央部设置有收纳第2轴承26的第2轴承收纳部215。第2轴承收纳部215是沿着中心轴线C延伸的圆筒状的部位。第2轴承26的外圈固定在第2轴承收纳部215的内周面上。
中性点汇流条单元23具有6个中性点汇流条51和对中性点汇流条51进行保持的树脂成型品的中性点汇流条保持架52。中性点汇流条51是板状的部件,例如由铜等导电性高的材料形成。多个线圈43的引出线430(参照图2)与各中性点汇流条51连接。即,多个线圈43彼此星形结线,并经由中性点汇流条51而电连接。
6个中性点汇流条51是外侧汇流条B11、B13、B22和内侧汇流条B12、B21、B23。外侧汇流条B11、B13、B22在中性点汇流条保持架52的外周端部沿周向排列配置。内侧汇流条B12、B21、B23在比外侧汇流条B11、B13、B22靠径向内侧的位置沿周向排列配置。即,外侧汇流条B11、B13、B22配置在比内侧汇流条B12、B21、B23靠径向外侧的位置。另外,在以下的说明中,有时将外侧汇流条B11、B13、B22统称为“外侧汇流条BS”。另外,有时将内侧汇流条B12、B21、B23统称为“内侧汇流条BU”。
如图2所示,配置在径向外侧的第1U相线圈U11、第1V相线圈V11及第1W相线圈W11与配置在径向外侧的外侧汇流条B11连接。从轴向观察时,外侧汇流条B11配置在第1U相线圈U11、第1V相线圈V11、第1W相线圈W11的径向内端附近。配置在径向内侧的第1U相线圈U12、第1V相线圈V12以及第1W相线圈W12与配置在径向内侧的内侧汇流条B12连接。从轴向观察时,内侧汇流条B12配置在第1U相线圈U12、第1V相线圈V12、第1W相线圈W12的径向内端附近。
另外,配置在径向外侧的第1U相线圈U13、第1V相线圈V13以及第1W相线圈W13与配置在径向外侧的外侧汇流条B13连接。外侧汇流条B13配置在第1U相线圈U13、第1V相线圈V13、第1W相线圈W13的径向内端附近。配置在径向内侧的第2U相线圈U21、第2V相线圈V21以及第2W相线圈W21与配置在径向内侧的内侧汇流条B21连接。从轴向观察时,内侧汇流条B21配置在第2U相线圈U21、第2V相线圈V21、第2W相线圈W21的径向内端附近。
另外,配置在径向外侧的第2U相线圈U22、第2V相线圈V22以及第2W相线圈W22与配置在径向外侧的外侧汇流条B22连接。从轴向观察时,外侧汇流条B22配置在第2U相线圈U22、第2V相线圈V22、第2W相线圈W22的径向内端附近。配置在径向内侧的第2U相线圈U23、第2V相线圈V23以及第2W相线圈W23与配置在径向内侧的内侧汇流条B23连接。从轴向观察时,内侧汇流条B23配置在第2U相线圈U23、第2V相线圈V23、第2W相线圈W23的径向内端附近。
在本实施方式中,三个中性点汇流条51配置在径向上的大致相同的位置且周向上的不同的位置。另外,其他三个中性点汇流条51配置在径向上的大致相同的位置且周向上的不同的位置。这样,通过沿周向分割配置中性点汇流条51,中性点汇流条51向马达1的组装作业变得容易。另外,能够提高中性点汇流条51的成品率。
另外,配置在径向上的大致相同的位置的三个中性点汇流条51为同一形状。由此,与6个中性点汇流条51的形状全部不同的情况相比,马达1的制造效率提高。
中性点汇流条单元23配置在定子22的轴向另一侧且第1盖部212的轴向一侧。另外,中性点汇流条单元23配置在第1轴承收纳部214的径向外侧。即,中性点汇流条51配置在与第1轴承25在径向上重叠的位置。通过使第1轴承25和中性点汇流条单元23在径向上重叠,能够抑制马达1的轴向长度的增大。
相用汇流条单元24具有6个相用汇流条53、对相用汇流条53进行保持的绝缘体的相用汇流条保持架241(汇流条保持架)、覆盖相用汇流条53的至少轴向一侧的相用汇流条罩242(汇流条罩)以及6个连接销55。相用汇流条53、相用汇流条保持架241及相用汇流条罩242分别配置在定子22的轴向一侧且第2盖部213的轴向另一侧。相用汇流条保持架241及相用汇流条罩242例如由树脂成型品构成。各连接销55分别沿轴向贯通第2盖部213。
相用汇流条53是板状的部件,例如由铜等导电性高的材料形成。在各相用汇流条53上连接有至少一个线圈43的引出线430。另外,各连接销55在第2盖部213的轴向另一侧与相用汇流条53的外部连接端子53d电连接。在使用马达1时,各连接销55在第2盖部213的轴向一侧即壳体21的外部与外部电源(未图示)电连接。在马达1驱动时,从外部电源经由连接销55及相用汇流条53向线圈43供给驱动电流。
在本实施方式中,6个相用汇流条53是第1U相汇流条531、第1V相汇流条532、第1W相汇流条533、第2U相汇流条534、第2V相汇流条535和第2W相汇流条536。另外,在以下的说明中,有时将第1U相汇流条531、第1V相汇流条532、第1W相汇流条533、第2U相汇流条534、第2V相汇流条535以及第2W相汇流条536统称为“相用汇流条53”。
相用汇流条53、相用汇流条保持架241以及相用汇流条罩242配置在第2轴承收纳部215的径向外侧。即,相用汇流条53、相用汇流条保持架241及相用汇流条罩242配置在与第2轴承26在径向上重叠的位置。通过使第2轴承26和相用汇流条单元24在径向上重叠,能够进一步抑制马达1的轴向长度的增大。
另外,以下,将定子22、中性点汇流条单元23以及相用汇流条单元24一并称为定子单元20(参照图11)。另外,关于中性点汇流条单元23及相用汇流条单元24的更详细的构造以及线圈43、中性点汇流条51、相用汇流条53的电连接,在后文叙述。
如图1所示,旋转部3具有轴31和转子32。
轴31是沿着中心轴线C延伸的柱状的部件。轴31的材料例如使用不锈钢。轴31一边被第1轴承25及第2轴承26支承,一边以中心轴线C为中心进行旋转。轴31的轴向另一侧的端部比第1盖部212向轴向另一侧突出。轴31的轴向一侧的端部比第2盖部213向轴向一侧突出。在轴31的轴向一侧的端部和轴向另一侧的端部中的至少一方经由齿轮等动力传递机构而连结有作为驱动对象的装置。
如上所述,在本实施方式中,将中性点汇流条单元23和第1轴承25配置于在径向上重叠的位置并且将相用汇流条单元24和第2轴承26配置于在径向上重叠的位置。由此,能够缩短马达1的重心与轴31的端部之间的距离。因此,能够缩短马达1的重心与作为驱动对象的装置之间的轴向的距离。由此,在马达1和该装置中的任意一方产生的振动不容易在向另一方传递时被放大。因此,能够抑制马达1和该装置中的振动。
转子32配置在定子22的径向内侧,与轴31一起旋转。转子32具有转子铁芯321及多个磁铁322。
转子铁芯321由将电磁钢板沿轴向层叠而成的层叠钢板构成。在转子铁芯321的中央设置有沿轴向延伸的插入孔320。轴31配置在转子铁芯321的插入孔320内。轴31的外周面和转子铁芯321的内周面互相固定。
多个磁铁322例如通过粘接剂而固定在转子铁芯321的外周面上。各磁铁322的径向外侧的面成为与齿412的径向内侧的端面对置的磁极面。多个磁铁322以N极与S极交替地排列的方式沿周向排列。另外,也可以使用在周向上交替地磁化出N极和S极的圆环状的磁铁来代替多个磁铁322。另外,多个磁铁322也可以埋入于转子铁芯321的内部。
在上述结构的马达1中,当从外部电源(未图示)经由相用汇流条53向线圈43赋予驱动电流时,在定子铁芯41的多个齿412中产生磁通。然后,通过齿412与磁铁322之间的磁通的作用,产生周向的扭矩。由此,旋转部3相对于静止部2以中心轴线C为中心进行旋转。
<关于马达内的电连接>
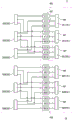
图3是示出马达1的电路结构的图。
马达1具有18个线圈43、6个中性点汇流条51和6个相用汇流条53。18个线圈43、6个中性点汇流条51以及6个相用汇流条53分别被分为第1控制系统11和第2控制系统12。第1控制系统11和第2控制系统12分别独立地被单独控制。即,第1控制系统11和第2控制系统12不电连接。
18个线圈43被分为属于第1控制系统11的第1线圈组431和属于第2控制系统12的第2线圈组432。在第1线圈组431及第2线圈组432中分别包含9个线圈43。
具体而言,第1线圈组431包含第1U相线圈U11、U12、U13、第1V相线圈V11、V12、V13、第1W相线圈W11、W12、W13。第2线圈组432包含第2U相线圈U21、U22、U23、第2V相线圈V21、V22、V23、第2W相线圈W21、W22、W23。
外侧汇流条B11、B13及内侧汇流条B12属于第1控制系统11。内侧汇流条B21、B23及外侧汇流条B22属于第2控制系统12。
外侧汇流条B11、B13及内侧汇流条B12分别连接有第1线圈组431所包含的三个线圈43各自的引出线430。具体而言,外侧汇流条B11连接有第1U相线圈U11、第1V相线圈V11以及第1W相线圈W11各自的引出线430。内侧汇流条B12连接有第1U相线圈U12、第1V相线圈V12以及第1W相线圈W12各自的引出线430。外侧汇流条B13连接有第1U相线圈U13、第1V相线圈V13以及第1W相线圈W13各自的引出线430。
内侧汇流条B21、B23及外侧汇流条B22分别连接有第2线圈组432所包含的三个线圈43各自的引出线430。具体而言,内侧汇流条B21连接有第2U相线圈U21、第2V相线圈V21以及第2W相线圈W21各自的引出线430。外侧汇流条B22连接有第2U相线圈U22、第2V相线圈V22以及第2W相线圈W22各自的引出线430。内侧汇流条B23连接有第2U相线圈U23、第2V相线圈V23以及第2W相线圈W23各自的引出线430。
如上所述,第1控制系统11及第2控制系统12分别具有三个中性点汇流条51。由此,能够使与各中性点汇流条51连接的线圈43的数量为最低限度的三个而作为三相马达的中性点NP。
第1U相汇流条531、第1V相汇流条532和第1W相汇流条533属于第1控制系统11。第2U相汇流条534、第2V相汇流条535和第2W相汇流条536属于第2控制系统12。
第1U相汇流条531连接有第1U相线圈U11、U12、U13各自的引出线430。第1V相汇流条532连接有第1V相线圈V11、V12、V13各自的引出线430。第1W相汇流条533连接有第1W相线圈W11、W12、W13各自的引出线430。
第2U相汇流条534连接有第2U相线圈U21、U22、U23各自的引出线430。第2V相汇流条535连接有第2V相线圈V21、V22、V23各自的引出线430。第2W相汇流条536连接有第2W相线圈W21、W22、W23各自的引出线430。
<关于相用汇流条单元的构造>
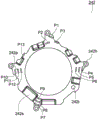
图4是从轴向一侧(在图1中为下方)观察相用汇流条单元24的立体图。图5是从轴向一侧观察相用汇流条单元24的俯视图。图6是从轴向一侧观察将相用汇流条单元24的相用汇流条罩242卸下后的状态的俯视图。图4和图5示出通过热熔接将相用汇流条保持架241和相用汇流条罩242固定之前的状态。图4中的上方对应于图1的轴向一侧(下方),图4中的下方对应于图1的轴向另一侧(上方)。另外,图6的阴影线所示的区域R1~R13表示在相用汇流条53的基部53a中与相用汇流条罩242的突出部242p接触的区域。
相用汇流条53是板状的部件,其具有相对于中心轴线C沿周向延伸的基部53a、从基部53a向径向外侧延伸的多个延伸设置部53b、设置在各延伸设置部53b的径向外端部的线圈连接端子53c(端子)和外部连接端子53d(端子)。外部连接端子53d位于比线圈连接端子53c靠轴向一侧的位置。在本实施方式中,各相用汇流条53具有三个延伸设置部53b,各延伸设置部53b具有两个线圈连接端子53c和一个外部连接端子53d。即,各相用汇流条53具有两个线圈连接端子53c和一个外部连接端子53d。另外,在本实施方式中,基部53a沿周向延伸,但并不限定于此,基部53a例如可以沿与径向交叉的方向延伸。
在相用汇流条保持架241中,从中心轴线C侧朝向径向外侧依次配置有第1U相汇流条531、第1V相汇流条532、第1W相汇流条533。在相用汇流条保持架241中,从中心轴线C侧朝向径向外侧依次配置有第2U相汇流条534、第2V相汇流条535、第2W相汇流条536。另外,第1U相汇流条531和第2U相汇流条534在周向上相邻。第1V相汇流条532和第2V相汇流条535在周向上相邻。第1W相汇流条533和第2W相汇流条536在周向上相邻。另外,相用汇流条53的配置并不限定于此,可以适当变更。
相用汇流条保持架241在俯视时为大致九边形的多边形状。相用汇流条53的基部53a沿着大致九边形(多边形)的边延伸,并且在大致九边形的角部CR附近向径向内侧弯曲。延伸设置部53b配置在角部CR以外。另外,相用汇流条保持架241在俯视时可以是其他多边形状(例如六边形或八边形等),也可以是多边形状以外的形状(例如圆形等)。在本实施方式中,相用汇流条53的基部53a在角部CR附近向径向内侧弯曲,因此,如果使相用汇流条保持架241在俯视时为多边形状,则相用汇流条53的周向的定位变得容易,因此优选。另外,“多边形”也包含大致多边形。
在相用汇流条保持架241上设置有将在径向上相邻的相用汇流条53互相隔离的隔离壁241k(参照图6~图8)。在内周壁241n与隔壁241k之间、沿径向相邻的隔壁241k之间、隔壁241k与外周壁241g之间构成槽部241d,在槽部241d内收纳有相用汇流条53。通过隔壁241k,能够防止在径向上相邻的相用汇流条53之间的短路。另外,隔壁241k的轴向一侧的端部位于比相用汇流条53的基部53a的轴向一侧的端部靠轴向一侧的位置。
在隔离壁241k的轴向一侧的端部设置有沿轴向切口而成的第1切口部241a。跨越隔壁241k的延伸设置部53b的一部分配置在第1切口部241a内。由此,能够抑制相用汇流条单元24的轴向长度的增大。
另外,在相用汇流条保持架241的外周壁241g的轴向一侧的端部设置有沿轴向切口而成的第2切口部241b。跨越外周壁241g的延伸设置部53b的一部分配置在第2切口部241b内。由此,能够进一步抑制相用汇流条单元24的轴向长度的增大。
相用汇流条保持架241具有多个从外周面向径向外侧突出的脚部241t。在本实施方式中,脚部241t设置有9个,按照相用汇流条保持架241的形状(大致九边形)的每条边来配置。即,多个脚部241t配置在角部CR以外的位置。另外,脚部241t的数量不限于9个,只要是多个即可。
定子22的绝缘件42具有在比线圈43靠径向外侧的位置向轴向一侧突出的绝缘件突出部421(参照图1)。多个脚部241t固定在绝缘件突出部421上。脚部241t与绝缘件突出部421的固定方法没有特别限定,例如可以使用热熔接方法。
另外,相用汇流条保持架241具有多个从外周部向轴向一侧突出的突起部241p。在本实施方式中,突起部241p设置有四个。另外,突起部241p的数量不限于四个,只要是多个即可。
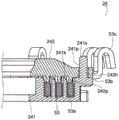
图7是沿图5的A-A线的剖视图。图8示出图5中的热熔接后的沿A-A线的剖视图。图9是从背侧(相用汇流条保持架241侧)观察相用汇流条罩242的立体图。图10是从背侧观察相用汇流条罩242的俯视图。图9中的上方对应于图1的轴向另一侧(上方),图9中的下方对应于图1的轴向一侧(下方)。
相用汇流条罩242具有向轴向另一侧突出的多个突出部242p。突出部242p的平面形状为长方形,突出部242p的长度方向与周向大致一致。另外,“长方形”也包含大致长方形。在本实施方式中,突出部242p设置有13个。如图6的区域R1~R13所示,对于各相用汇流条53,多个突出部242p与基部53a接触,并且至少一个突出部242p与延伸设置部53b的附近的基部53a接触。
在此,若将13个突出部242p分别设为突出部P1~P13,则图6的区域R1~R13分别成为供突出部P1~P13接触的区域。在本实施方式中,突出部P1、P2、P3、P5、P6、P8、P9、P10、P11、P13与延伸设置部53b的附近的基部53a接触。另外,“延伸设置部53b的附近”是指例如突出部242p与延伸设置部53b之间的距离在与突出部242p的长度方向的长度相同的长度以内。在此,“相同的长度”也包含大致相同的长度。
在相用汇流条罩242的外周部设置有沿轴向贯通的多个贯通孔242h。在本实施方式中,四个贯通孔242h沿周向排列配置。另外,贯通孔242h的数量不限于四个,可以是与相用汇流条保持架241的突起部241p相同的数量,也可以是四个以上。
接着,对相用汇流条保持架241和相用汇流条罩242的固定方法进行说明。首先,使相用汇流条保持架241的突起部241p贯穿插入于相用汇流条罩242的贯通孔242h。接着,使用热熔接装置(未图示),一边加热突起部241p的前端部241s(轴向一侧的端部)一边将突起部241p的前端部241s(轴向一侧的端部)向轴向另一侧(在图7中为下方)按压。由此,突起部241p的前端部241s变形,突起部241p的前端部241s的宽度W1(参照图8)比贯通孔242h的直径W2(参照图8)大。另外,前端部241s的宽度比突起部241p的根部的宽度大。通过热熔接装置,将突起部241p和相用汇流条罩242热熔接。此时,通过前端部241s和相用汇流条保持架241的轴向另一侧的端面来夹持相用汇流条罩242。由此,相用汇流条罩242被固定在相用汇流条保持架241上。
与延伸设置部53b的附近的基部53a接触的突出部242p优选配置在突起部241p及贯通孔242h的附近。另外,“突起部241p及贯通孔242h的附近”是指例如突出部242p与突起部241p和贯通孔242h之间的距离在与突出部242p的长度方向的长度相同的长度以内。在此,“相同的长度”也包含大致相同的长度。
在相用汇流条53的基部53a中,角部CR附近的部分通过塑性变形而被弯曲加工,角部CR附近以外的部分未被弯曲加工而成为大致直线的部分。因此,关于相用汇流条保持架241中的相用汇流条53的轴向的位置精度,角部CR附近以外的大致直线的部分比塑性变形的角部CR附近的部分高。因此,优选与延伸设置部53b的附近的基部53a接触的突出部242p配置在多边形的角部CR以外的位置。由此,与延伸设置部53b的附近的基部53a接触的突出部242p能够高精度地与基部53a接触。
相用汇流条罩242具有向轴向一侧鼓起的收纳部242s(参照图4、图9)。从径向内侧的基部53a延伸设置并与径向外侧的基部53a交叉的延伸设置部53b被收纳在收纳部242s中。
另外,相用汇流条单元24具有检测相用汇流条53的温度的温度传感器90(参照图5)。相用汇流条罩242具有传感器收纳部242t,该传感器收纳部242t是面向相用汇流条53的贯通孔。温度传感器90配置在传感器收纳部242t内。另外,传感器收纳部242t也可以采用面对相用汇流条53的凹部来代替贯通孔。
<关于中性点汇流条单元的构造>
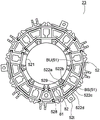
图11是从轴向另一侧观察定子单元20的立体图。图12是中性点汇流条单元23的穿过中性点汇流条51(内侧汇流条BU)并沿着周向的剖视图。另外,图11的下部表示由上部的圆包围的部分的放大图。
各中性点汇流条51分别具有三个板状部511。板状部511是沿轴向且周向扩展的平板状的部位。在各板状部511上设置有一处与线圈43的引出线430连接的连接部位512。通过在平板状的板状部511上设置连接部位512,与对弯曲的中性点汇流条进行焊接的情况相比,能够容易地进行焊接作业。
中性点汇流条51的平面形状(从轴向观察到的形状)是以中心轴线C为中心的正九边形的一部分。另外,定子铁芯41的齿412为9个。通过沿着正九边形配置中性点汇流条51,能够使配置在径向的同一位置的板状部511的长度变长。因此,在齿412的个数为N个的情况下,通过沿着正N边形配置中性点汇流条51,能够高效地形成周向的长度较长的N个板状部511。因此,能够进一步提高对中性点汇流条51与线圈43的引出线430进行焊接时的作业性。
在本实施方式中,内侧汇流条BU与线圈43的引出线430的连接部位512位于外侧汇流条BS的径向外侧。另外,外侧汇流条BS与线圈43的引出线430的连接部位512位于外侧汇流条BS的径向外侧。这样,优选将全部的连接部位512配置在中性点汇流条51的径向内侧和径向外侧中的任意一方。由此,在对中性点汇流条51与线圈43的引出线430进行焊接时,能够在不变更焊接夹具的朝向的情况下对全部的连接部位512进行焊接。因此,能够提高马达1的生产性。
另外,本实施方式的中性点汇流条51是通过将平板状的钢板的两处弯折而形成的。因此,在中性点汇流条51上有可能产生要通过回弹而恢复为平板状的力。在产生了回弹的情况下,通过基于该回弹的力,中性点汇流条51会以朝向径向外侧的方式变形。
在马达1中,连接部位512配置在中性点汇流条51的径向外侧。因此,在中性点汇流条51产生基于回弹的力的情况下,中性点汇流条51沿着朝向线圈43的引出线430的方向移动。因此,产生了中性点汇流条51与线圈43的引出线430互相按压的力。因此,能够抑制在中性点汇流条51产生了基于回弹的力的情况下中性点汇流条51与线圈43的引出线430的固定强度的降低。
另外,回弹的问题不仅在本实施方式那样将中性点汇流条51在多处弯折的情况下产生,在将中性点汇流条51整体弯曲成圆弧状的情况下也有可能产生。因此,即使在将中性点汇流条51整体弯曲成圆弧状的情况下,连接部位512也优选配置在中性点汇流条51的径向外侧。
中性点汇流条保持架52具有沿着与中心轴线C大致垂直的方向扩展的基座部521以及从基座部521向轴向另一侧(在图11中为上方)延伸的保持部522。基座部521在中心轴线C的周围呈环状扩展,在俯视时为大致正九边形的多边形状。
保持部522具有第1内侧支承壁522a、第2内侧支承壁522b、第1外侧支承壁522c及第2外侧支承壁522d。第1内侧支承壁522a支承内侧汇流条BU的外周面。第2内侧支承壁522b支承内侧汇流条BU的内周面。第1外侧支承壁522c支承外侧汇流条BS的内周面。第2外侧支承壁522d支承外侧汇流条BS的外周面。
内侧汇流条BU被第1内侧支承壁522a和第2内侧支承壁522b夹持而保持。外侧汇流条BS被第1外侧支承壁522c和第2外侧支承壁522d夹持而保持。由此,能够抑制内侧汇流条BU及外侧汇流条BS相对于中性点汇流条保持架52沿径向移动。
在第1内侧支承壁522a和第1外侧支承壁522c的双方上设置有多个开口部528。多个开口部528沿周向排列配置,供线圈43的引出线430穿过。另外,从轴向观察时,开口部528配置在沿周向相邻的齿412之间。在本实施方式中,开口部528由径向的切口构成。通过开口部528而形成与线圈43的连接部位512。另外,开口部528只要设置在第1内侧支承壁522a和第1外侧支承壁522c中的至少一方即可。
连结肋529设置在沿周向相邻的开口528之间。连结肋529沿径向延伸而连结第1内侧支承壁522a和第1外侧支承壁522c。多个连结肋529被配置成以中心轴线C为中心的放射状。连结肋529连结第1内侧支承壁522a的开口部528的周向的端缘和第1外侧支承壁522c的开口部528的周向的端缘。
中性点汇流条51的周向的一部分称为被保持部61,其他一部分称为露出部62。被保持部61是径向的两侧面的至少一部分被中性点汇流条保持架52覆盖的部位。即,被保持部61的径向的两侧面的至少一部分被保持部522覆盖。另外,露出部62是径向两侧面从中性点汇流条保持架52露出的部位。被保持部61和露出部62在周向上相邻。
中性点汇流条51与线圈43的引出线430的连接部位512配置于露出部62。由此,即使中性点汇流条51不具有沿轴向或径向突出的端子,也能够连接中性点汇流条51和线圈43的引出线430。因此,能够在不降低制造马达1时的作业效率的情况下使马达1小型化。
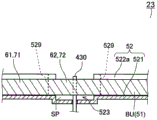
另外,将中性点汇流条51的周向的一部分称为接触部71,将其他一部分称为非接触部72。接触部71是轴向一侧的端面与中性点汇流条保持架52的基座部521的轴向另一侧的端面接触的部位。非接触部72是轴向一侧的端面面向空间SP(参照图12)的部位。另外,非接触部72的至少一部分与露出部62重叠。接触部71和非接触部72在周向上相邻。
本实施方式的基座部521的轴向另一侧的表面具有向轴向一侧凹陷的凹部523。凹部523的轴向一侧的端面与中性点汇流条51的轴向一侧的端面在轴向上隔开间隔地对置。即,在凹部523的轴向一侧的端面与中性点汇流条51的轴向一侧的端面之间存在空间SP。因此,在中性点汇流条51中,与凹部523在轴向上重叠的部分成为非接触部72。
中性点汇流条51与线圈43的引出线430的连接部位512配置在非接触部72。由此,能够将中性点汇流条51和线圈43的引出线430焊接至中性点汇流条51的轴向一侧的端部。即,能够增大中性点汇流条51与线圈43的引出线430的焊接面积。因此,焊接条件稳定,并且能够提高中性点汇流条51与线圈43的引出线430的固定强度。
在本实施方式中,被保持部61的位置与接触部71的位置一致。另外,露出部62的位置与非接触部72的位置一致。
与中性点汇流条51连接的线圈43的引出线430的轴向另一侧的端部配置在比中性点汇流条51的轴向另一侧的端部靠轴向另一侧的位置。由此,能够将中性点汇流条51和线圈43的引出线430焊接至中性点汇流条51的轴向另一侧的端部。即,能够进一步增大中性点汇流条51与线圈43的引出线430的焊接面积。因此,焊接条件稳定,并且能够进一步提高中性点汇流条51与线圈43的引出线430的固定强度。
如图11所示,基座部521具有第1线圈线引导部81及第2线圈线引导部82。第1线圈线引导部81是从基座部521的径向外端部朝向外侧汇流条BS切口而成的切口。与各外侧汇流条BS连接的线圈43的引出线430分别配置在第1线圈线引导部81的内部。
由于基座部521具有第1线圈线引导部81,因此在组装定子单元20时,容易将线圈43的引出线430配置在外侧汇流条BS的侧面附近。由此,能够提高马达1的制造效率。另外,由于基座部521具有第1线圈线引导部81,因此在外侧汇流条BS与线圈43的引出线430焊接时,能够抑制线圈43的引出线430的位置偏移。因此,焊接条件稳定,并且能够提高外侧汇流条BS与线圈43的引出线430的固定强度。
另外,第2线圈线引导部82是沿轴向贯通的贯通孔。从轴向观察时,第2线圈线引导部82与内侧汇流条BU的径向外端重叠。由于基座部521具有第2线圈线引导部82,因此在组装定子单元20时,容易将线圈43的引出线430配置在径向内侧的内侧汇流条BU的侧面附近。因此,能够提高马达1的制造效率。
另外,中性点汇流条保持架52具有多个从第2外侧支承壁522d的外周面向径向外侧突出的安装部52t。安装部52t与设置在绝缘件42上的绝缘件凹部422嵌合,并热熔接在绝缘件42上。由此,中性点汇流条单元23被固定在定子22上。
在安装部52t上设置有向轴向另一侧突出的保持架突出部524。保持架突出部524的轴向另一侧的端部配置在比中性点汇流条51及线圈43的引出线430的轴向另一侧的端部靠轴向另一侧的位置。由此,即使在将定子单元20的轴向另一侧以朝向下侧的方式载置在作业台等上的情况下,线圈43的引出线430也不会与作业台等接触。因此,能够抑制构成线圈43的导线断线、或者中性点汇流条51和线圈43的引出线430在连接部位512处剥离。
另外,如图1所示,中性点汇流条单元23配置在线圈43的轴向另一侧,相用汇流条单元24配置在线圈43的轴向一侧。即,6个中性点汇流条51全部配置在线圈43的轴向另一侧,6个相用汇流条53全部配置在线圈43的轴向一侧。中性点汇流条51和相用汇流条53相对于定子22互相配置在轴向相反侧,因此,能够确保中性点汇流条51的可布局的区域较宽。由此,能够将外侧汇流条BS与线圈43的引出线430的连接部位512和内侧汇流条BU与线圈43的引出线430的连接部位512隔开间隔地配置。因此,中性点汇流条51与线圈43的引出线430的焊接作业的效率提高。
在焊接中性点汇流条51和线圈43的引出线430时,中性点汇流条51的温度因焊接热而上升。在本实施方式中,将与一个中性点汇流条51连接的线圈43的引出线430的数量设为最小的三个。由此,即使在一个中性点汇流条51中的最后进行焊接的连接部位512,也能够以适当的温度进行焊接作业。即,能够在全部的焊接部位以稳定的条件进行焊接。另外,由于不需要为了焊接条件的稳定而中断焊接作业以等待中性点汇流条51的温度降低,因此能够缩短焊接作业的单件工时。
由此,在制造定子单元20时,能够沿周向依次对配置在径向的同一位置的中性点汇流条51与线圈43的引出线430的连接部位512进行焊接作业。其结果是,能够进一步提高焊接作业的作业效率。
如上所述,配置在径向内侧的线圈43和配置在径向内侧的内侧汇流条BU连接,并且,配置在径向外侧的线圈43和配置在径向外侧的外侧汇流条BS连接。在为了具有冗余而具有多个系统的线圈组431、432的马达1中,线圈43的数量较多。但是,通过该结构,即使是线圈43的数量多的马达1,也能够抑制从线圈43引出的导线的配置的复杂化。另外,“冗余”的马达的结构是指即使在马达中的一部分的功能产生缺陷的情况下,也能够继续马达的旋转功能的结构。
在本实施方式中,如图2所示,存在有在周围仅配置有第1线圈组431所包含的线圈43的齿412、在周围配置有第1线圈组431所包含的线圈43和第2线圈组432所包含的线圈43的齿412以及在周围仅配置有第2线圈组432所包含的线圈43的齿412。即,第1线圈组431的配置区域和第2线圈组432的配置区域分开。由此,在第1控制系统11及第2控制系统12中的任意一方无法控制的情况下,能够控制的另一方的控制系统的线圈43不易受到无法控制的控制系统的影响。
另外,在相用汇流条单元24的温度传感器90的检测温度超过规定的上限温度的情况下,例如可以从第1控制系统11和第2控制系统12的一方切换到另一方。由此,能够在第1控制系统11和第2控制系统12中的一方变得无法控制之前切换为另一方,能够将一方的无法控制的状态防患于未然。
另外,通过将内侧汇流条BU和外侧汇流条BS配置成在径向上重叠,不仅能够使中性点汇流条51与线圈43的引出线430的连接部位512在周向上分散,还能够在径向上分散。在具有多个系统的线圈组431、432的马达1中,为了具有冗余,线圈43的数量较多。即,中性点汇流条51与线圈43的引出线430的连接部位512的数量较多。但是,通过该结构,能够扩大连接部位512彼此的间隔。
<中性点汇流条单元的变形例>
图13及图14分别是示出本实施方式的变形例的中性点汇流条单元23的立体图及俯视图。中性点汇流条保持架52在俯视时可以是圆形。另外,“圆形”包含大致圆形。另外,也可以从中性点汇流条保持架52中省略保持架突出部524。另外,第2线圈线引导部82也可以与第1线圈线引导部81同样地由沿径向切口而成的切口构成。
另外,可以是,内侧汇流条BU配置于在从轴向观察时与齿412的伞部412a重叠的位置,外侧汇流条BS配置于在从轴向观察时比线圈43靠径向外侧的位置。由此,内侧汇流条BU及外侧汇流条BS与线圈43在轴向上不重叠,能够抑制马达1的轴向上的长度的增大。
<本实施方式的作用效果>
根据本实施方式,相用汇流条单元24(汇流条单元)具有:绝缘体的相用汇流条保持架241(汇流条保持架),其对马达1的多个相用汇流条53(汇流条)进行支承,该马达1以中心轴线C为中心进行旋转;以及绝缘体的相用汇流条罩242(汇流条罩),其覆盖各相用汇流条53的至少轴向一侧并固定在相用汇流条保持架241上。各相用汇流条53具有:基部53a;多个延伸设置部53b,它们从基部53a向径向外侧延伸;以及线圈连接端子53c(端子)和外部连接端子53d(端子),它们设置在各延伸设置部53b的径向外端部。相用汇流条罩242具有向轴向另一侧突出的多个突出部242p,多个突出部242p与各相用汇流条53接触,并且至少一个突出部242p与延伸设置部53b的附近的基部53a接触。
由此,由于能够利用突出部242p和相用汇流条保持架241来夹着延伸设置部53b的附近的基部53a,因此,能够防止线圈连接端子53c及外部连接端子53d的晃动。因此,能够使线圈连接端子53c与线圈43的引出线430的电连接和外部连接端子53d与外部布线的电连接稳定,能够提高相用汇流条单元24的可靠性。
多个相用汇流条53的基部53a沿径向排列配置,在相用汇流条保持架241上设置有将沿径向相邻的相用汇流条53互相隔离的隔壁241k。在隔壁241k的轴向一侧的端部设置有沿轴向切口而成的第1切口部241a。跨越隔壁241k的延伸设置部53b的一部分配置在第1切口部241a内。由此,能够通过隔壁241g防止在径向上相邻的相用汇流条53之间的短路,并且能够抑制相用汇流条单元24的轴向长度的增大。
在相用汇流条保持架241的外周壁241g的轴向一侧的端部设置有沿轴向切口而成的第2切口部241b。跨越外周壁241g的延伸设置部53b的一部分配置在第2切口部241b内。由此,能够进一步抑制相用汇流条单元24的轴向长度的增大。
隔壁241k的轴向一侧的端部位于比基部53a的轴向一侧的端部靠轴向一侧的位置。由此,能够使在径向上相邻的相用汇流条53之间的沿面距离变长。因此,能够抑制相用汇流条单元24的径向长度的增大,并且容易地防止在径向上相邻的相用汇流条53之间的短路。
相用汇流条罩242具有向轴向一侧鼓起的收纳部242s。从径向内侧的基部53a延伸设置并与径向外侧的基部53a交叉的延伸设置部53b被收纳在收纳部242s中。由此,能够防止与径向外侧的相用汇流条53的基部53a交叉的延伸设置部53b与相用汇流条罩242发生干涉。
相用汇流条单元24还具有检测相用汇流条53的温度的温度传感器90。相用汇流条罩242具有传感器收纳部242t,该传感器收纳部242t是面向相用汇流条53的凹部或贯通孔,温度传感器90配置在传感器收纳部242t内。由此,能够通过温度传感器90容易地检测相用汇流条53的温度,例如能够基于温度传感器90的检测结果来控制马达1。另外,能够将温度传感器90简单地安装在相用汇流条单元24上。
相用汇流条罩242和相用汇流条保持架241是树脂成型品。相用汇流条保持架241具有突起部241p,该突起部241p的前端部241s的宽度比根部大,相用汇流条罩242具有供突起部241p贯穿插入的贯通孔242h。突起部241p的前端部241s的宽度W1比贯通孔242h的直径W2大。由此,能够容易地将相用汇流条罩242固定于相用汇流条保持架241。另外,也可以是,相用汇流条保持架241具有贯通孔242h,相用汇流条罩242具有突起部241p。即,只要相用汇流条罩242和相用汇流条保持架241中的任意一方具有突起部241p,相用汇流条罩242和相用汇流条保持架241的另一方具有贯通孔242h即可。
与延伸设置部53b的附近的基部53a接触的突出部242p优选配置在突起部241p和贯通孔242h的附近。由此,在将贯穿插入于贯通孔242h的突起部241p与相用汇流条罩242固定时,与延伸设置部53b附近的基部53a接触的突出部242p和基部53a的尺寸精度稳定。因此,突出部242p能够更稳定地与延伸设置部53b附近的基部53a接触。
相用汇流条保持架241在俯视时为多边形状,优选突起部241p和贯通孔242h配置于多边形的角部CR,延伸设置部53b配置在角部CR以外的位置。由此,在突起部241p和贯通孔242h中,例如在进行热熔接来固定相用汇流条罩242和相用汇流条保持架241时,能够减小在相用汇流条保持架241中配置延伸设置部53b的部位的热变形等。因此,能够提高相用汇流条保持架241中的延伸设置部53b的位置精度,能够使线圈连接端子53c与引出线430的连接和外部连接端子53d与外部布线的连接更稳定。
相用汇流条保持架241在俯视时为多边形状。由此,相用汇流条53的周向的定位变得容易。
在相用汇流条53的基部53a中,角部CR附近的部分通过塑性变形而被弯曲加工,角部CR附近以外的部分未被弯曲加工而成为大致直线的部分。因此,关于相用汇流条保持架241中的相用汇流条53的轴向的位置精度,角部CR附近以外的大致直线的部分比塑性变形的角部CR附近的部分高。因此,优选与延伸设置部53b的附近的基部53a接触的突出部242p配置在多边形的角部CR以外的位置。由此,与延伸设置部53b的附近的基部53a接触的突出部242p能够高精度地与基部53a接触。
马达1具有相用汇流条单元24、定子22和转子32,该转子32以中心轴线C为中心进行旋转,具有与定子22在径向上对置的磁铁322。由此,能够容易地实现具有能够提高可靠性的相用汇流条单元24的马达1。
相用汇流条保持架241具有多个从外周面向径向外侧突出的脚部241t,多个脚部241t固定在定子22上。由此,能够容易地将相用汇流条单元24安装在定子22上。
另外,在中性点汇流条单元23中,通过树脂成型品的中性点汇流条保持架52对相对于马达1的中心轴线C沿周向延伸并与定子22的线圈43连接的内侧汇流条BU和外侧汇流条BS进行保持,外侧汇流条BS配置在比内侧汇流条BU靠径向外侧的位置。中性点汇流条保持架52具有:第1内侧支承壁522a,其支承内侧汇流条BU的外周面;以及第1外侧支承壁522c,其支承外侧汇流条BS的内周面。另外,中性点汇流条保持架52具有:多个开口部528,它们在第1内侧支承壁522a和第1外侧支承壁522c的至少一方开口并沿周向排列,供线圈43的引出线430穿过;以及连结肋529,其在沿周向相邻的开口部528之间沿径向延伸,连结第1内侧支承壁522a和第1外侧支承壁522c。
通过连结肋529,能够在不增大轴向的长度的情况下提高中性点汇流条保持架52的刚性。另外,在使中性点汇流条保持架52成型时,经由连结肋529的树脂将第1内侧支承壁522a的树脂与第1外侧支承壁522c的树脂连接。因此,能够在防止树脂向第1内侧支承壁522a的外周侧及第1外侧支承壁522c的内周侧绕入的同时将树脂填充到模具中,能够提高使中性点汇流条保持架52成型时的熔液流动。另外,由于经由连结肋529的树脂将向模具填充后的第1内侧支承壁522a的树脂和第1外侧支承壁522c的树脂以大致相同的程度冷却,因此,能够抑制缩痕等的产生。因此,能够减少中性点汇流条保持架52的变形,提高中性点汇流条51的位置精度。其结果是,能够提高线圈43的引出线430与中性点汇流条51的连接精度,能够提高中性点汇流条单元23的可靠性。
中性点汇流条保持架52具有:第2内侧支承壁522b,其支承内侧汇流条BU的内周面;以及第2外侧支承壁522d,其支承外侧汇流条BS的外周面。内侧汇流条BU被第1内侧支承壁522a和第2内侧支承壁522b夹持而保持,外侧汇流条BS被第1外侧支承壁522c和第2外侧支承壁522d夹持而保持。由此,能够容易地保持内侧汇流条BU和外侧汇流条BS。
开口部528设置在第1内侧支承壁522a和第1外侧支承壁522c上。由此,能够提高对线圈43的引出线430与内侧汇流条BU和外侧汇流条BS进行焊接时的作业性。
连结肋529连结第1内侧支承壁522a的开口部528的周向的端缘和第1外侧支承壁522c的开口部528的周向的端缘。由此,即使设置开口部528,也能够容易地加强第1内侧支承壁522a和第1外侧支承壁522c。
开口部528由径向的切口构成。由此,能够容易地实现开口部528。
多个连结肋529被配置成以中心轴线C为中心的放射状。由此,能够进一步提高中性点汇流条保持架52的刚性。
马达1具有中性点汇流条单元23、定子22以及转子32,该转子32以中心轴线C为中心进行旋转,具有与定子22的径向内侧对置配置的磁铁322。定子22具有:环状的铁芯背部411;多个齿412,它们从铁芯背部411的内周面向径向内侧延伸并且沿周向排列配置;以及线圈43,其卷绕在各齿412上。由此,可以容易地实现能够提高中性点汇流条保持架52的刚性而提高中性点汇流条51的位置精度的马达1。
从轴向观察时,开口部528配置在沿周向相邻的齿412之间。由此,有效地利用相邻的齿412之间的空间,能够容易地抑制马达1的轴向长度的增大。
通过将多个线圈43星形结线而构成多个中性点NP,中性点NP由内侧汇流条BU和外侧汇流条BS构成。由此,能够容易地实现具有中性点汇流条单元23的马达1,该中性点汇流条单元23在径向内侧及径向外侧具有中性点NP。
各齿412在径向内端具有沿周向突出的伞部412a。优选的是,内侧汇流条BU配置在从轴向观察时与伞部412a重叠的位置,外侧汇流条BS配置在从轴向观察时比线圈43靠径向外侧的位置。由此,能够进一步抑制马达1的轴向长度的增大。
多个线圈43包含:第1线圈组431,其具有属于第1控制系统11的多个线圈43;以及第2线圈组432,其具有属于与第1控制系统11独立的第2控制系统12的多个线圈43。由此,即使在第1控制系统11和第2控制系统12中的一方的一部分发生了失效的情况下,也能够使用另一方来继续马达1的旋转。
齿412优选为9个。由此,能够容易地实现具有中性点汇流条单元23的9槽的马达1。
另外,在本实施方式中,齿412的数量为9个,线圈43的数量为18个。即,槽数为9,控制系统数为2。然而,本发明不限于此。槽数不限于9,例如也可以是6或12。另外,控制系统数也可以是3个以上。
另外,在本实施方式中,在一个齿412的周围配置有两个线圈43。然而,本发明不限于此。可以在一个齿的周围配置一个线圈,也可以在一个齿的周围配置三个以上的线圈。另外,在本实施方式中,在一个齿412上沿径向排列配置有两个线圈43,但本发明不限于此。也可以在一个齿412的相同的径向位置以重叠的方式配置两个线圈43。另外,也可以使线圈43为双线卷。
另外,在本实施方式中,分别单独地控制第1控制系统11和第2控制系统12,但本发明不限于此。也可以通过单一的控制部联动地控制第1控制系统11和第2控制系统12。但是,即使在该情况下,在马达1中,属于第1控制系统11的线圈、中性点汇流条和相用汇流条也不与属于第2控制系统12的线圈、中性点汇流条和相用汇流条电连接。
另外,本实施方式的马达1是内转子型的马达,但也可以将本发明应用于外转子型的马达。
另外,各部件的细节部分的形状也可以与本申请的各图所示的形状存在差异。另外,也可以在不产生矛盾的范围内适当地组合上述各要素。
产业上的可利用性
本发明能够用于相用汇流条单元(汇流条单元)以及具有该相用汇流条单元(汇流条单元)的马达。
标号说明
1:马达;11:第1控制系统;12:第2控制系统;2:静止部;20:定子单元;21:壳体;211:筒部;212:第1盖部;213:第2盖部;214:第1轴承收纳部;215:第2轴承收纳部;22:定子;23:中性点汇流条单元;24:相用汇流条单元(汇流条单元);241:相用汇流条保持架(汇流条保持架);241a:第1切口部;241b:第2切口部;241d:槽部;241g:外周壁;241k:隔壁;241n:内周壁;241p:突起部;241s:前端部;241t:脚部;242:相用汇流条罩(汇流条罩);242h:贯通孔;242p:突出部;242s:收纳部;242t:传感器收纳部;25:第1轴承;26:第2轴承;3:旋转部;31:轴;32:转子;320:插入孔;321:转子铁芯;322:磁铁;41:定子铁芯;411:铁芯背部;412:齿;412a:伞部;42:绝缘件;421:绝缘件突出部;422:绝缘件凹部;43:线圈;430:引出线;431:第1线圈组;432:第2线圈组;51:中性点汇流条;511:板状部;512:连接部位;52:中性点汇流条保持架;52t:安装部;521:基座部;522:保持部;522a:第1内侧支承壁;522b:第2内侧支承壁;522c:第1外侧支承壁;522d:第2外侧支承壁;523:凹部;524:保持架突出部;528:开口部;529:连结肋;53:相用汇流条(汇流条);53a:基部;53b:延伸设置部;53c:线圈连接端子(端子);53d:外部连接端子(端子);531:第1U相汇流条;532:第1V相汇流条;533:第1W相汇流条;534:第2U相汇流条;535:第2V相汇流条;536:第2W相汇流条;55:连接销;61:被保持部;62:露出部;71:接触部;72:非接触部;81:第1线圈线引导部;82:第2线圈线引导部;90:温度传感器;BS、B11、B13、B22:外侧汇流条;BU、B12、B21、B23:内侧汇流条;C:中心轴线;CR:角部;NP:中性点;SP:空间。
Claims (13)
1.一种汇流条单元,其具有:绝缘体的汇流条保持架,其对马达的相用的多个汇流条进行支承,该马达以中心轴线为中心进行旋转;以及绝缘体的汇流条罩,其覆盖各所述汇流条的至少轴向一侧并固定在所述汇流条保持架上,其中,
各所述汇流条具有:
基部;
多个延伸设置部,它们从所述基部向径向外侧延伸;以及
端子,其设置在各所述延伸设置部的径向外端部,
所述汇流条罩具有向轴向另一侧突出的多个突出部,
多个所述突出部与各所述汇流条接触,并且至少一个所述突出部与所述延伸设置部的附近的所述基部接触。
2.根据权利要求1所述的汇流条单元,其中,
多个所述汇流条的所述基部沿径向排列配置,
在所述汇流条保持架上设置有将沿径向相邻的所述汇流条互相隔离的隔壁,
在所述隔壁的所述轴向一侧的端部设置有沿轴向切口而成的第1切口部,
跨越所述隔壁的所述延伸设置部的一部分配置在所述第1切口部内。
3.根据权利要求2所述的汇流条单元,其中,
在所述汇流条保持架的外周壁的所述轴向一侧的端部设置有沿轴向切口而成的第2切口部,
跨越所述外周壁的所述延伸设置部的一部分配置在所述第2切口部内。
4.根据权利要求2或3所述的汇流条单元,其中,
所述隔壁的所述轴向一侧的端部位于比所述基部的所述轴向一侧的端部靠所述轴向一侧的位置。
5.根据权利要求2或3所述的汇流条单元,其中,
所述汇流条罩具有向所述轴向一侧鼓起的收纳部,
从径向内侧的所述基部延伸设置并与径向外侧的所述基部交叉的所述延伸设置部被收纳在所述收纳部中。
6.根据权利要求2或3所述的汇流条单元,其中,
该汇流条单元还具有对所述汇流条的温度进行检测的温度传感器,
所述汇流条罩具有传感器收纳部,该传感器收纳部是面向所述汇流条的凹部或孔部,
所述温度传感器配置在所述传感器收纳部内。
7.根据权利要求2或3所述的汇流条单元,其中,
所述汇流条罩和所述汇流条保持架是树脂成型品,
所述汇流条罩和所述汇流条保持架中的任意一方具有突起部,该突起部的前端部的宽度比根部的宽度大,所述汇流条罩和所述汇流条保持架中的另一方具有供所述突起部贯穿插入的贯通孔,
所述前端部的宽度比所述贯通孔的直径大。
8.根据权利要求7所述的汇流条单元,其中,
与所述延伸设置部的附近的所述基部接触的所述突出部配置在所述突起部和所述贯通孔的附近。
9.根据权利要求7所述的汇流条单元,其中,
所述汇流条保持架在俯视时为多边形状,
所述突起部或所述贯通孔配置在多边形的角部,
所述延伸设置部配置在所述角部以外的位置。
10.根据权利要求2或3所述的汇流条单元,其中,
所述汇流条保持架在俯视时为多边形状。
11.根据权利要求10所述的汇流条单元,其中,
与所述延伸设置部的附近的所述基部接触的所述突出部配置在多边形的角部以外的位置。
12.一种马达,其具有:
权利要求1~11中的任意一项所述的汇流条单元;
定子;以及
转子,其以所述中心轴线为中心进行旋转,具有在径向上与所述定子对置的磁铁。
13.根据权利要求12所述的马达,其中,
所述汇流条保持架具有多个从外周面向径向外侧突出的脚部,
多个所述脚部固定在所述定子上。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017072680 | 2017-03-31 | ||
| JP2017-072680 | 2017-03-31 | ||
| PCT/JP2018/002868 WO2018179790A1 (ja) | 2017-03-31 | 2018-01-30 | バスバーユニット及びそれを備えたモータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110546862A CN110546862A (zh) | 2019-12-06 |
| CN110546862B true CN110546862B (zh) | 2021-07-02 |
Family
ID=63674885
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880022827.9A Active CN110546862B (zh) | 2017-03-31 | 2018-01-30 | 汇流条单元及具有该汇流条单元的马达 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11205936B2 (zh) |
| JP (1) | JP7024783B2 (zh) |
| CN (1) | CN110546862B (zh) |
| DE (1) | DE112018001656T5 (zh) |
| WO (1) | WO2018179790A1 (zh) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3425776B1 (en) * | 2016-03-02 | 2021-05-05 | LG Innotek Co., Ltd. | Busbar assembly and motor comprising same |
| DE112018001673T5 (de) * | 2017-03-31 | 2019-12-19 | Nidec Corporation | Motor |
| DE102019207665A1 (de) * | 2018-09-26 | 2020-03-26 | Zf Friedrichshafen Ag | Isoliereinheit für eine elektrische Maschine |
| WO2020195401A1 (ja) * | 2019-03-28 | 2020-10-01 | 日本電産株式会社 | モータ |
| DE102019121190A1 (de) * | 2019-04-26 | 2020-10-29 | Schaeffler Technologies AG & Co. KG | Elektrische Maschine |
| US20220320970A1 (en) * | 2019-06-06 | 2022-10-06 | Nidec Corporation | Stator unit and motor |
| US11133719B2 (en) | 2019-06-26 | 2021-09-28 | Atieva, Inc. | Motor winding connector ring |
| EP3985845A4 (en) * | 2019-08-20 | 2022-09-07 | Anhui Welling Auto Parts Co., Ltd. | BUS BAR, BUS BAR MAIN BODY, ENGINE, ELECTRIC POWER STEERING SYSTEM AND VEHICLE |
| JP2023516570A (ja) * | 2020-02-24 | 2023-04-20 | エルジー イノテック カンパニー リミテッド | モータ |
| CN113497528A (zh) * | 2020-03-19 | 2021-10-12 | 日本电产株式会社 | 保持架、马达以及电气产品 |
| FR3108809B1 (fr) * | 2020-03-25 | 2022-10-28 | Nidec Psa Emotors | Dispositif de connexion pour stator |
| CN113452179B (zh) * | 2020-03-27 | 2024-04-23 | 日本电产株式会社 | 定子以及马达 |
| JP2021164220A (ja) * | 2020-03-31 | 2021-10-11 | 日本電産株式会社 | バスバーユニットおよびモータ |
| JP7365956B2 (ja) * | 2020-04-08 | 2023-10-20 | 株式会社ミツバ | ブラシレスモータ及びブラシレスモータ制御方法 |
| CN111613695B (zh) * | 2020-06-04 | 2021-09-14 | 许昌学院 | 一种晶体硅光伏组件智能化焊接加工设备 |
| CN111756144A (zh) * | 2020-07-03 | 2020-10-09 | 苏州达思灵电机有限公司 | 一种层叠式过桥连接的扁线双凸极励磁电机定子 |
| JP7433153B2 (ja) * | 2020-07-16 | 2024-02-19 | 三菱電機株式会社 | 回転電機のステータの結線板、回転電機のステータ、回転電機、回転電機のステータの結線板の製造方法、回転電機のステータの製造方法および回転電機の製造方法 |
| US20220109341A1 (en) * | 2020-10-01 | 2022-04-07 | Brose Fahrzeugteile SE & Co. Kommanditgesellschaft, Würzburg | Connection unit for electric motor |
| EP4412062A1 (en) * | 2021-09-27 | 2024-08-07 | Denso Corporation | Rotating electrical machine |
| WO2023048226A1 (ja) * | 2021-09-27 | 2023-03-30 | 株式会社デンソー | 回転電機 |
| EP4199328A1 (en) * | 2021-12-16 | 2023-06-21 | Hamilton Sundstrand Corporation | Method of manufacturing a stator assembly |
| JP7328588B1 (ja) | 2022-03-24 | 2023-08-17 | 株式会社デンソートリム | 回転電機 |
| GB2625138A (en) * | 2022-12-08 | 2024-06-12 | Bowman Power Group Ltd | A high-speed electrical machine and a stator |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09312948A (ja) * | 1996-03-19 | 1997-12-02 | Toshiba Corp | 回転電機のステータ |
| JP2010119238A (ja) * | 2008-11-13 | 2010-05-27 | Sumitomo Wiring Syst Ltd | モータ巻線用配電部材 |
| CN101926075A (zh) * | 2008-03-13 | 2010-12-22 | 日本电产株式会社 | 马达 |
| JP2013102596A (ja) * | 2011-11-08 | 2013-05-23 | Mitsuba Corp | バスバーユニットおよびブラシレスモータ |
| CN105027393A (zh) * | 2013-03-08 | 2015-11-04 | 萱场工业株式会社 | 汇流条单元 |
| CN105634171A (zh) * | 2014-11-25 | 2016-06-01 | 日本电产株式会社 | 马达 |
| CN105743288A (zh) * | 2014-12-26 | 2016-07-06 | 日本电产株式会社 | 马达以及马达的制造方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2921752B2 (ja) * | 1996-09-18 | 1999-07-19 | ファナック株式会社 | 電動機の巻線温度検出素子の取付け方法および取付け具 |
| JP2008259259A (ja) * | 2007-04-02 | 2008-10-23 | Nippon Densan Corp | バスバーユニット |
| JP5652004B2 (ja) * | 2010-06-02 | 2015-01-14 | 日産自動車株式会社 | 配電構造部品およびその製造方法 |
| US20140028127A1 (en) * | 2012-07-25 | 2014-01-30 | Bradley Duane Chamberlin | Buss bar assembly having alignment and retention feature |
| KR101560057B1 (ko) * | 2013-11-20 | 2015-10-15 | 뉴모텍(주) | 버스바 결선 구조를 갖는 모터의 스테이터 및 이를 이용한 코일의 병렬 결선 방법 |
| JP6480797B2 (ja) | 2014-07-08 | 2019-03-13 | Kyb株式会社 | ステータユニット、ステータユニットを備える回転電機及びステータユニットの製造方法 |
| JP2015100267A (ja) | 2015-02-27 | 2015-05-28 | カヤバ工業株式会社 | バスバーユニット |
-
2018
- 2018-01-30 DE DE112018001656.0T patent/DE112018001656T5/de active Pending
- 2018-01-30 US US16/487,204 patent/US11205936B2/en active Active
- 2018-01-30 WO PCT/JP2018/002868 patent/WO2018179790A1/ja active Application Filing
- 2018-01-30 CN CN201880022827.9A patent/CN110546862B/zh active Active
- 2018-01-30 JP JP2019508646A patent/JP7024783B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09312948A (ja) * | 1996-03-19 | 1997-12-02 | Toshiba Corp | 回転電機のステータ |
| CN101926075A (zh) * | 2008-03-13 | 2010-12-22 | 日本电产株式会社 | 马达 |
| JP2010119238A (ja) * | 2008-11-13 | 2010-05-27 | Sumitomo Wiring Syst Ltd | モータ巻線用配電部材 |
| JP2013102596A (ja) * | 2011-11-08 | 2013-05-23 | Mitsuba Corp | バスバーユニットおよびブラシレスモータ |
| CN105027393A (zh) * | 2013-03-08 | 2015-11-04 | 萱场工业株式会社 | 汇流条单元 |
| CN105634171A (zh) * | 2014-11-25 | 2016-06-01 | 日本电产株式会社 | 马达 |
| CN105743288A (zh) * | 2014-12-26 | 2016-07-06 | 日本电产株式会社 | 马达以及马达的制造方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110546862A (zh) | 2019-12-06 |
| US20200014272A1 (en) | 2020-01-09 |
| JP7024783B2 (ja) | 2022-02-24 |
| WO2018179790A1 (ja) | 2018-10-04 |
| JPWO2018179790A1 (ja) | 2020-02-06 |
| US11205936B2 (en) | 2021-12-21 |
| DE112018001656T5 (de) | 2020-01-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110546862B (zh) | 汇流条单元及具有该汇流条单元的马达 | |
| CN110476331B (zh) | 汇流条单元及具有该汇流条单元的马达 | |
| CN111355326B (zh) | 马达 | |
| CN107925301B (zh) | 马达 | |
| US10778060B2 (en) | Motor | |
| CN106972669B (zh) | 马达 | |
| US8193677B2 (en) | Brushless motor and electric power steering apparatus having exposed bus bar | |
| WO2018038246A1 (ja) | モータ | |
| CN108448773B (zh) | 汇流条单元以及马达 | |
| US10581302B2 (en) | Stator for an electric motor | |
| US10840656B2 (en) | Bus bar unit and rotary electric machine having the same | |
| WO2018151133A1 (ja) | ブラシレスモータ | |
| WO2020067255A1 (ja) | モータ | |
| JP2021052492A (ja) | バスバーユニットおよびモータ | |
| CN109586479B (zh) | 马达和电动助力转向装置 | |
| CN113452176B (zh) | 马达 | |
| CN114287095B (zh) | 马达 | |
| WO2019167843A1 (ja) | モータ | |
| KR20220103391A (ko) | 모터 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |