CN107134964B - 基于扩张状态观测器的五相容错永磁电机无位置传感器控制方法 - Google Patents
基于扩张状态观测器的五相容错永磁电机无位置传感器控制方法 Download PDFInfo
- Publication number
- CN107134964B CN107134964B CN201710282630.6A CN201710282630A CN107134964B CN 107134964 B CN107134964 B CN 107134964B CN 201710282630 A CN201710282630 A CN 201710282630A CN 107134964 B CN107134964 B CN 107134964B
- Authority
- CN
- China
- Prior art keywords
- phase
- motor
- observer
- current
- observed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/24—Vector control not involving the use of rotor position or rotor speed sensors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/13—Observer control, e.g. using Luenberger observers or Kalman filters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/18—Estimation of position or speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/022—Synchronous motors
- H02P25/024—Synchronous motors controlled by supply frequency
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2207/00—Indexing scheme relating to controlling arrangements characterised by the type of motor
- H02P2207/05—Synchronous machines, e.g. with permanent magnets or DC excitation
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
本发明公开了一种基于扩张状态观测器的五相容错永磁电机无位置传感器控制方法,该方法将两相静止坐标系下的电流状态方程中的反电势作为干扰量,不需要通过状态变量的微分和滤波环节就可以实现扰动量的正确估计,根据观测出的反电势,利用锁相环观测器得到电机的转速和转子位置。同时基于观测器参数的选择设计一个随电机转速变化的转子位置误差补偿环节,实现基于ESO的五相容错永磁电机无位置传感器控制。本发明设计的反电势观测器,观测器增益选择方法简单,对电机转速和负载变化具有较好的自适应能力和鲁棒性,避免了滤波器的使用,可以实现五相容错永磁同步电机无位置传感器系统的可靠运行。
Description
技术领域
本发明涉及一种基于扩张状态观测器的五相容错永磁电机无位置传感器控制方法,适用于永磁电机高精度伺服控制领域。
背景技术
传统的高性能的永磁同步电机的矢量控制通常需要位置传感器来检测转子的位置信号,位置传感器主要有霍尔传感器、光电编码器与旋转变压器等。虽然这些传感器均可以为电机系统提供位置信号,但是位置传感器会增加系统的成本,同时位置传感器的安装会影响电机控制系统的精度,而且位置传感器属于精密的电子元件,其所处环境的温度、湿度和振动均会对位置传感器造成很大的影响,这样就造成了电机系统的可靠性降低。
避免上述问题的最直接的方法就是在电机控制系统中不使用位置传感器,这样就可以克服使用位置传感器带来的一系列的缺点,扩展永磁同步电机系统的运用领域,于是永磁同步电机在无位置传感器控制(Sensorless Control)领域的研究逐渐成为电机控制中一个重要的方向。永磁同步电机的无位置控制方法一般分为两类:一类是适用于低速和零速的高频信号注入法,它利用电机的凸极或者饱和凸极特性,注入旋转或者脉振的高频信号,得到电机静止或者低速运行时的转子位置信号,但是它的运行范围以及动态特性受母线电压的限制。另外一类是利用电机的电磁关系,通过直接计算或者观测器来得到电机的反电势或者磁链,从而得出电机的转子位置信号,这种方法被广泛使用于中高速领域。其中滑模观测器法是被广泛使用的一种方法,然而由于其需要电流的微分信号以及其作用的开关函数会导致估测出的反电势信号会出现抖振问题,需要多级滤波器来进行消除,提高了转子位置观测器的复杂度。
发明内容
本发明针对现有领域技术的不足,提出了一种基于扩张状态观测器的五相容错永磁电机无位置传感器控制方法,将两相静止坐标系下的反电势作为系统的扰动量,利用扩张状态观测器来观测电机的反电势。该方法无需计算电流的微分信号,避免了电流的噪声对估算结果的影响。同时可以通过合理的参数的选择,可以使得观测出的反电势落后于实际的反电势的一定的相位角,并且设计了随着转速变化的补偿环节,提高了估测位置角的精度,可以实现高性能的无位置传感器控制。
本发明采用的技术方案有以下步骤:
一种基于扩张状态观测器的五相容错永磁电机无位置传感器控制方法,包括以下步骤:
S1,检测五相容错永磁电机的电流ia,ib,ic,id,ie,经过5s/2s(Clark)变换得到两相静止坐标系下的电流iα和iβ;
S2,开关处于1时,q轴给定电流为一个常数iqref;
S3,当电机启动,开关处于1时,通过位置角发生器产生给定的转子位置角θref,经过2s/2r(Park)变换得到直轴电流id和交轴电流iq;
S4,直轴电流 给定为0,q轴给定电流为iqref,它们电流反馈值id和iq分别作差,差值分别经过PI控制器得到直轴电压ud和交轴电压uq;
给定为0,q轴给定电流为iqref,它们电流反馈值id和iq分别作差,差值分别经过PI控制器得到直轴电压ud和交轴电压uq;
S5,利用转子位置信息,对直轴电压ud和交轴电压uq进行2r/2s(反Park)变换,得到α-β轴电压uα和uβ;
S6,uα和uβ作为SVPWM模块的输入,产生10路PWM脉冲,控制五相电压源逆变器产生五相脉冲宽度变化的电压,驱动五相容错永磁电机旋转;
S7,当电机稳定运行时,切换到开关2,将α-β轴电压uα和uβ以及α-β轴电流iα和iβ送入扩张状态观测器得到观测出的α-β轴的反电势 和
和 观测出的反电势经过锁相环观测器得到观测出的位置角
观测出的反电势经过锁相环观测器得到观测出的位置角 和电角速度
和电角速度
S8,当开关处于2时,将给定的机械转速ω*和观测出的机械转速 作差送入PI控制器得到q轴给定电流
作差送入PI控制器得到q轴给定电流 位置角被替换为由基于ESO的反电势观测器计算的补偿后的位置角
位置角被替换为由基于ESO的反电势观测器计算的补偿后的位置角
S9,重复S3-S6,实现电机的双闭环稳定运行。
进一步,所述步骤S3中位置角发生器的设计步骤如下:
S3.1,当处于开关1时,位置角发生器函数可以写成以下形式:

其中θref表示给定的位置角,ωe表示给定的电机的电角速度,由上式可知,给定的位置角由电机的电角速度积分而来。
进一步,所述步骤S7中扩张状态观测器的设计步骤如下:
S7.1,当开关处于1且电机运行在一个平稳转速时,开关由1切换到2;
S7.2,将得出的α-β轴电压uα和uα以及α-β轴电流iα和iβ送入观测器,经基于ESO的反电势观测器观测出α-β轴反电势 和
和
S7.3,将估测出的反电势 和
和 送入锁相环观测器分别得到位置角
送入锁相环观测器分别得到位置角 和电角速度
和电角速度
进一步,所述步骤S7.2中基于ESO的反电势观测器的设计如下:
电机在两相静止坐标系下的状态方程如下:

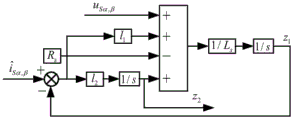
其中Ls和Rs分别代表定子电感和电阻,eα和eβ分别代表α-β轴的真实反电势。将两相静止坐标系下的反电势作为扰动量,对上式进行整理,以α轴为例可以把上式中写成基于ESO的形式:

从上式中可以看出,z2表示观测出的扰动量即反电势,z1表示观测出的系统状态量即电流iα的观测量,电压uα可以通过控制量输出而得到,电流iα可以通过电流传感器测量并进行变换得到,l1和l2是ESO中的增益参数。
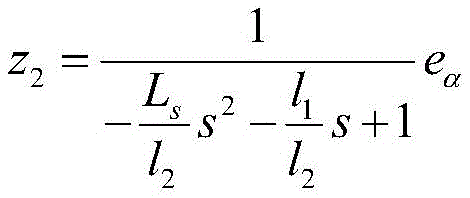
为了准确的得到观测器的扰动量即电机的反电势,观测出的反电势和电机的真实反电势之间的关系可以通过上式进一步推导,从而得出反电势观测器的传递函数:

由此可见,反电势观测值和真实反电势之间的关系是一个二阶传递函数的关系,根据自动控制理论中的知识,要使得真实值与观测值之间有一个相对确定的关系,那么传递函数可以表示为一个二阶的滤波器,那么可以将上式改写成以下形式:

要使得传递函数成为二阶滤波器,由上式可知,观测器增益之间的关系可以表示为:

按照上述的公式推导,便可以合理的选择参数,完成电机反电势的观测。按照上式的观测器增益的选择方式,反电势观测值和电机真实反电势之间的关系可写为:

上式可以看作两个一阶低通滤波器级联在一起,截止频率为ωcutoff=-2l2/l1。以上推导均以α轴的模型为例,同理,β轴的公式推导也是相同的。
由上面得出的结论可知,利用扩张状态观测器估测出的反电势和实际的反电势在相位上相差一个固定的角度,可以通过计算来补偿估测出的位置角,使之接近于真实位置角。补偿后的位置角可以表示为下式:

其中 表示由锁相环观测器得出的位置角,
表示由锁相环观测器得出的位置角, 表示补偿过后的位置角,
表示补偿过后的位置角, 表示随电机转速而变化的补偿角,
表示随电机转速而变化的补偿角, 表示观测出的电角速度。
表示观测出的电角速度。
进一步,所述步骤S7.3中锁相环观测器的设计如下:
锁相环观测器的原理是利用系统输出相位和给定信号相位差控制系统输出信号频率,直到输出信号频率跟踪给定信号频率。输出相位和给定信号相位的差值送入PI控制器,经调节后,给定信号频率及相位与输出信号的频率和相位均保持一致,达到相位跟踪的效果。
因此,将PLL应用到转子位置信号的提取当中,这里以经扩张状态观测器估计出的反电势作为锁相环的输入信号,根据反电动势与转子位置之间的关系,建立锁相环转子位置检测系统,来提取反电动势中包含的转子位置信息。
锁相环的位置估计的误差传递函数为:

其中,ψf表示电机的永磁磁链, 表示观测出的电角速度,kP表示比例系数,ki表示积分系数。由于转子位置信号是斜坡函数,锁相环转子位置检测等效系统稳态误差为:
表示观测出的电角速度,kP表示比例系数,ki表示积分系数。由于转子位置信号是斜坡函数,锁相环转子位置检测等效系统稳态误差为:

由上式可知,转子的误差信号的稳态误差为零,可见采用锁相环观测器可以准确的从反电势中提取出转子位置信息。
本发明具有以下有益效果:
1)给定q轴电流一个恒定的值,利用位置角发生器产生位置角,可以使电机由零速快速的启动到一个平稳的转速,解决了无位置传感器电机由零速启动的问题;
2)将两相静止坐标系下的电机的状态方程看作是一个新的系统,利用扩张状态观测器,将反电势作为干扰量,通过合理的参数选择,正确的观测出电机的反电势;
3)如果观测器的参数选择得当,可以设计出随着电机转速变化而变化的转子位置补偿环节,实现转子位置角的正确补偿;
4)由于采用了扩张状态观测器,免去了由于电流的微分计算和传统滑模观测器的开关动作带来的高频噪声,在观测器系统中无需使用滤波器,提高了系统运行的带宽并且更加简单易行。
附图说明
图1为基于扩张状态观测器的五相容错永磁电机无位置传感器控制方法结构框图;
图2为五相容错永磁电机截面图;
图3为基于扩张状态观测器的观测反电势的结构框图;
图4为锁相环转子位置检测系统框图;
图5为锁相环转子位置检测系统等效框图;
图6为五相永磁容错电机在400r/min稳态过程中的实测转速与估测转速波形图;
图7为五相永磁容错电机在400r/min稳态过程中的估测反电势波形图;
图8为五相永磁容错电机在400r/min稳态过程中的实测位置角与估测位置角波形图;
图9为五相永磁容错电机在800r/min稳态过程中的实测转速与估测转速波形图;
图10为五相永磁容错电机在800r/min稳态过程中的估测反电势波形图;
图11为五相永磁容错电机在800r/min稳态过程中的实测位置角与估测位置角波形图;
图12为五相永磁容错电机动态运行过程中的实测转速与估测转速波形图;
图13为五相永磁容错电机动态运行过程中的交轴电流波形图;
图14为五相永磁容错电机加减载动态运行过程中的实测转速与估测转速波形图;
图15为五相永磁容错电机加减载动态运行过程中的交轴电流波形图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
如图1所示,本发明的一种基于扩张状态观测器的五相容错永磁电机无位置传感器控制方法,包括以下控制步骤:
S1,检测五相永磁容错电机的五相电流ia,ib,ic,id,ie,并经过5s/2s(Clark)变换得到两相静止坐标系下电流iα和iβ;
S2,当图1中开关处于1时,q轴给定电流为一个常数iqref;
S3,当电机启动,开关处于1时,通过位置角发生器产生给定的转子位置角θref,经过2s/2r(Park)变换得到反馈的直轴电流id和交轴电流iq;
S4,直轴电流 给定为0,q轴给定电流为iqref,它们与电流反馈值id和iq分别作差,差值分别经过PI控制器得到直轴电压ud和交轴电压uq;
给定为0,q轴给定电流为iqref,它们与电流反馈值id和iq分别作差,差值分别经过PI控制器得到直轴电压ud和交轴电压uq;
S5,利用给定或者估测出的转子位置信息,对直轴电压ud和交轴电压uq进行2r/2s(反Park)变换,得到α-β轴电压uα和uβ;
S6,uα和uβ作为SVPWM模块的输入,产生10路PWM脉冲,控制五相电压源逆变器产生五相脉冲宽度变化的电压,驱动五相容错永磁电机旋转;
S7,当处于开关1采用电流闭环启动,且电机稳定运行时,系统切换到开关2,将α-β轴电压uα和uβ以及α-β轴电流iα和iβ送入基于ESO的反电势观测器得到观测出的α-β轴的反电势 和
和 观测出的反电势经过反正切计算和微分得到观测出的位置角
观测出的反电势经过反正切计算和微分得到观测出的位置角 和电角速度
和电角速度
S8,当开关处于2时,将给定的机械转速ω*和观测出的机械转速 作差并送入转速环PI控制器得到q轴给定电流
作差并送入转速环PI控制器得到q轴给定电流 给定的位置角被替换为由基于ESO的反电势观测器计算的补偿后的位置角
给定的位置角被替换为由基于ESO的反电势观测器计算的补偿后的位置角
S9,利用观测出的位置角和转速,实现电机转速和电流的双闭环控制。
本发明基于永磁同步电机转子磁场定向矢量控制技术,如图1所示,通过电流传感器得到A、B、C、D、E五相电流,经过5s/2s(Clark)变换得到两相静止坐标系下电流iα和iβ;当开关处于1时,通过位置角发生器得到电机转子的位置角,利用转子的位置信息进行2s/2r(Park)及2r/2s(反Park)变换;直轴电流给定为 交轴电流给定值
交轴电流给定值 为一个常数iqref,电流环PI控制器的输出作为直轴电压ud和交轴电压uq,经过2r/2s(反Park)变换产生静止坐标系下的电压uα和uβ;两相电压经过SVPWM模块产生PWM脉冲,控制逆变器产生五相交流电压,驱动五相容错永磁电机由静止开始旋转到一个恒定的转速。当电机由静止运行到一个恒定的转速时,图1中的开关状态切换到开关2,将α-β轴电压uα和uβ以及α-β轴电流iα和iβ送入基于ESO的观测器得到观测出的位置角
为一个常数iqref,电流环PI控制器的输出作为直轴电压ud和交轴电压uq,经过2r/2s(反Park)变换产生静止坐标系下的电压uα和uβ;两相电压经过SVPWM模块产生PWM脉冲,控制逆变器产生五相交流电压,驱动五相容错永磁电机由静止开始旋转到一个恒定的转速。当电机由静止运行到一个恒定的转速时,图1中的开关状态切换到开关2,将α-β轴电压uα和uβ以及α-β轴电流iα和iβ送入基于ESO的观测器得到观测出的位置角 和电角速度
和电角速度 利用观测出的位置角和转速,实现电机转速和电流的双闭环控制。
利用观测出的位置角和转速,实现电机转速和电流的双闭环控制。
图2为五相容错永磁电机的截面图。由图2可知,选用的五相容错永磁电机永磁体呈V型排布,永磁体内嵌在转子里。定子绕组采用单层集中式分布,可以减小铜耗,提高效率。电机的电枢齿和容错齿交替排布,并且容错齿的宽度小于电枢齿,以此优化反电势,同时减少齿槽转矩和输出转矩脉动。单层集中式绕组与容错齿结构能减少相与相之间的耦合,提高电机的容错性能。
作为本发明的一个实施例,本发明在五相容错永磁同步电机转子定向矢量控制的基础上,采用电流闭环启动的方法,给定位置角,它可以将电机由零速拉至一个恒定的转速,然后利用基于ESO的观测器观测出的转速和位置角进行切换,实现五相容错永磁同步电机在无位置传感器下的转速和电流的双闭环控制。具体实施方案包含以下步骤:
1)当系统处于零速时,系统的开关状态处于开关1,交轴电流给定值 为一个常数iqref本案例中电机的额定q轴电流为iqref=12A,转子位置角由位置角发生器产生,图1中的位置角发生器可以表示为如下形式:
为一个常数iqref本案例中电机的额定q轴电流为iqref=12A,转子位置角由位置角发生器产生,图1中的位置角发生器可以表示为如下形式:

其中θref表示给定的位置角,ωe表示给定的电机的电角速度,由上式可知,给定的位置角由电机的电角速度积分而来。本案例中初始给定的电角速度约为ωe=115rad/s,由于该案例中电机的极对数为p=11,故对应的电机机械转速为ωm=100r/min。
3)检测五相永磁容错电机的五相电流ia,ib,ic,id,ie,并经过5s/2s(Clark)变换得到两相静止坐标系下电流iα和iβ,通过由位置角发生器产生的转子位置θref,利用2s/2r(Park)坐标变换模块将电流转变为反馈的d-q轴电流id和iq。
4)直轴给定电流 交轴给定电流为一个恒定值iqref,利用它们分别和反馈的d-q轴电流id和iq作差,分别通过电流环PI控制器得到d-q轴电压Ud和Uq。
交轴给定电流为一个恒定值iqref,利用它们分别和反馈的d-q轴电流id和iq作差,分别通过电流环PI控制器得到d-q轴电压Ud和Uq。
5)利用给定的位置角,然后采用2r/2s坐标变换模块将d-q轴电压转变为α-β轴电压uα和uβ。
6)uα和uβ作为SVPWM模块的输入,产生10路PWM脉冲,控制五相逆变器产生五相交流电压,驱动五相容错永磁电机旋转至一个恒定的转速。
7)当电机旋转至一个恒定的转速后,系统的开关状态切换至开关2,将α-β轴电压uα和uβ以及α-β轴电流iα和iβ送入基于ESO的反电势观测器并得到观测出的α-β轴的反电势 和
和 估测出的反电势
估测出的反电势 和
和 送入锁相环观测器分别得到位置角
送入锁相环观测器分别得到位置角 和电角速度
和电角速度 基于ESO的反电势观测器的设计包含以下步骤:
基于ESO的反电势观测器的设计包含以下步骤:
S7.1,当开关处于1且电机运行在一个平稳转速时,开关由1切换到2;
S7.2,将得出的α-β轴电压uα和uβ以及α-β轴电流iα和iβ送入自抗扰观测器,经基于ESO的反电势观测器观测出α-β轴反电势 和
和
S7.3,将估测出的反电势 和
和 送入锁相环观测器分别得到位置角
送入锁相环观测器分别得到位置角 和电角速度
和电角速度
所述步骤S7.2中基于ESO的反电势观测器设计如下:
电机在两相静止坐标系下的状态方程如下:

其中Ls和Rs分别代表定子电感和电阻,eα和eβ分别代表α-β轴的真实反电势。将两相静止坐标系下的反电势作为扰动量,对上式进行整理,以α轴为例可以把上式中写成基于ESO的形式:

从上式中可以看出,z2表示观测出的扰动量即反电势,z1表示观测出的系统状态量即电流iα的观测量,电压uα可以通过控制量输出而得到,电流iα可以通过电流传感器测量并进行变换得到,l1和l2是ESO中的增益参数,基于ESO的反电势观测器的转速与位置估计方法结构框图如图3所示。
为了准确的得到观测器的扰动量即电机的反电势,观测出的反电势和电机的真实反电势之间的关系可以通过上式进一步推导,从而得出反电势观测器的传递函数:

由此可见,反电势观测值和真实反电势之间的关系是一个二阶传递函数的关系,根据自动控制理论中的知识,要使得真实值与观测值之间有一个相对确定的关系,那么传递函数可以表示为一个二阶的滤波器,那么可以将上式改写成以下形式:

要使得传递函数成为二阶滤波器,由上式可知,观测器增益之间的关系可以表示为:

按照上述的公式推导,便可以合理的选择参数,完成电机反电势的观测。按照上式的观测器增益的选择方式,反电势观测值和电机真实反电势之间的关系可写为:

上式可以看作两个一阶低通滤波器级联在一起,截止频率为ωcutoff=-2l2/l1。以上推导均以α轴的模型为例,同理,β轴的公式推导也是相同的。
由上面得出的结论可知,利用扩张状态观测器估测出的反电势和实际的反电势在相位上相差一个固定的角度,可以通过计算来补偿估测出的位置角,使之接近于真实位置角。补偿后的位置角可以表示为下式:

其中 表示由锁相环观测器得出的位置角,
表示由锁相环观测器得出的位置角, 表示补偿过后的位置角,
表示补偿过后的位置角, 表示随电机转速而变化的补偿角,
表示随电机转速而变化的补偿角, 表示观测出的电角速度。
表示观测出的电角速度。
本案例中电机的定子电感为LS=0.0025H,定子电阻为RS=0.12Ω,永磁磁链为ψf=0.034Wb。基于ESO的反电势观测器的参数选为l1=100,l2=1000000。
所述步骤S7.3中锁相环观测器的设计如下:
如图4所示,锁相环(PLL)观测器的原理是利用系统输出相位和给定信号相位差控制系统输出信号频率,直到输出信号频率跟踪给定信号频率。输出相位和给定信号相位的差值送入PI控制器,经调节后,给定信号频率及相位与输出信号的频率和相位均保持一致,达到相位跟踪的效果。
因此,将PLL应用到转子位置信号的提取当中,这里以经ESO估计出的反电势作为锁相环的输入信号,根据反电动势与转子位置之间的关系,建立锁相环转子位置检测系统,来提取反电动势中包含的转子位置信息。
锁相环转子位置检测系统可以简化为如图5所示的等效图,从图中可以得知锁相环的位置估计的误差传递函数为:

其中,ψf表示永磁磁链, 表示观测出的电角速度,kP表示比例系数,ki表示积分系数。由于转子位置信号是斜坡函数,锁相环转子位置检测等效系统稳态误差为:
表示观测出的电角速度,kP表示比例系数,ki表示积分系数。由于转子位置信号是斜坡函数,锁相环转子位置检测等效系统稳态误差为:

由上式可知,转子的误差信号的稳态误差为零,可见采用锁相环观测器可以准确的从反电势中提取出转子位置信息。本案例中锁相环观测器的PI控制器的参数为kP(PLL)=30、ki(PLL)=30。
8)将给定的机械转速ω*和观测出的机械转速 的差送入转速环PI控制器得到q轴给定电流
的差送入转速环PI控制器得到q轴给定电流 转子位置角被替换为由基于ESO的反电势观测器得到并通过计算补偿角得出的位置角
转子位置角被替换为由基于ESO的反电势观测器得到并通过计算补偿角得出的位置角 这样便可实现在无位置传感器情况下的电机的双闭环控制。
这样便可实现在无位置传感器情况下的电机的双闭环控制。
9)为了说明采用此种基于ESO的反电势观测器的无位置传感器控制方法优点,在Matlab/Simulink中搭建了仿真模型。
图6和图9为电机在400r/min和800r/min稳定运行时的估测转速与实际转速波形图,从图中可以看出估计的转速可以很好的跟踪给定的转速,转速误差分别为1-2r/min和2-3r/min,在可接受的范围之内。由图7和图10可知,由基于ESO的反电势观测器在不同转速下观测出的反电动势均具有良好的正弦度。同时,由图8和图11中的估测位置角与实际位置角对比可以看出,通过对随着转速变化的转子位置误差的补偿,估测出的位置角基本可以很好的跟踪实际的位置角。
为了验证此种无位置控制策略的动态性能,将电机由400r/min拉至800r/min再回到400r/min,从图12中可以看出估测转速可以很好的跟踪实际转速。而从图13中可以看出q轴电流也很平滑,这就从另一方面证明了转速可以缓慢平滑上升,保证电机转速的动态响应。
当电机利用无位置传感器控制方法运行在一个给定的转速时,对电机实施加减载,以测试其在无位置运行时的抗扰动能力。从图14中观测转速与实际转速的对比中可以看出,分别在0.4s和0.8s对电机加减约6Nm负载时电机分别下降和上升约40r/min,观测的转速可以很好的跟踪实际测量的转速。从图15中可以看出,q轴电流波形可以很好的响应电机负载的变化,达到抗击外界负载变化的效果。
由上述可知,电机无论是运行在稳态或者动态的过程中,估计转速的变化趋势和实际转速始终保持一致,位置的跟踪趋势也很好,本发明中提出的无位置传感其控制方法均可以保持电机的平稳运行。
Claims (3)
1.一种基于扩张状态观测器的五相容错永磁电机无位置传感器控制方法,其特征在于,包括以下步骤:
S1,检测五相永磁容错电机的五相电流ia,ib,ic,id,ie,并经过5s/2s Clark变换得到两相静止坐标系下电流iα和iβ;
S2,当电机启动开关处于1时,q轴给定电流为一个常数iqref;
S3,当开关处于1时,通过位置角发生器产生给定的转子位置角θref,经过2s/2r Park变换得到直轴电流id和交轴电流iq;
S4,直轴电流 给定为0,q轴给定电流为iqref,它们与电流反馈值id和iq分别作差,差值分别经过PI控制器得到直轴电压ud和交轴电压uq;
给定为0,q轴给定电流为iqref,它们与电流反馈值id和iq分别作差,差值分别经过PI控制器得到直轴电压ud和交轴电压uq;
S5,利用给定或者估测出的转子位置信息,对直轴电压ud和交轴电压uq进行2r/2s反Park变换,得到的α-β轴电压uα和uβ;
S6,uα和uβ作为SVPWM模块的输入,产生10路PWM脉冲,控制五相电压源逆变器产生五相脉冲宽度变化的电压,驱动五相容错永磁电机的旋转;
S7,当处于开关1采用电流闭环启动,当电机稳定运行时系统切换到开关2,将α-β轴电压uα和uβ以及α-β轴电流iα和iβ送入扩张状态观测器得到观测出的α-β轴的反电势 和
和 观测出的反电势经过锁相环观测器得到观测出的位置角
观测出的反电势经过锁相环观测器得到观测出的位置角 和电角速度
和电角速度
所述基于ESO的反电势观测器设计如下:
电机在两相静止坐标系下的状态方程如下:

其中Ls和Rs分别代表定子电感和电阻,eα和eβ分别代表α-β轴的真实反电势;将两相静止坐标系下的反电势作为扰动量,对上式进行整理,在α轴中可以把上式中写成基于ESO的形式:

从上式中可以看出,z2表示观测出的扰动量即反电势,z1表示观测出的系统状态量即电流iα的观测量,电压uα可以通过控制量输出而得到,电流iα可以通过电流传感器测量并进行变换得到,l1和l2是ESO中的增益参数;
观测出的反电势和电机的真实反电势之间的关系可以通过上式进一步推导,从而得出反电势观测器的传递函数:

反电势观测值和真实反电势之间的关系是一个二阶传递函数的关系,传递函数表示为一个二阶的滤波器,那么可以将上式改写成以下形式:
要使得传递函数成为二阶滤波器,由上式可知,观测器增益之间的关系可以表示为:

按照上述的公式推导,便可以合理的选择参数,完成电机反电势的观测;按照上式的观测器增益的选择方式,反电势观测值和电机真实反电势之间的关系可写为:

上式可以看作两个一阶低通滤波器级联在一起,截止频率为ωcutoff=-2l2/l1,同理,β轴的公式推导也是相同的;
利用扩张状态观测器估测出的反电势和实际的反电势在相位上相差一个固定的角度,通过计算来补偿估测出的位置角,使之接近于真实位置角;补偿后的位置角可以表示为下式:

其中 表示由锁相环观测器得出的位置角,
表示由锁相环观测器得出的位置角, 表示补偿过后的位置角,
表示补偿过后的位置角, 表示随电机转速而变化的补偿角,
表示随电机转速而变化的补偿角, 表示观测出的电角速度;
表示观测出的电角速度;
步骤S7.3中锁相环观测器的设计如下:
将锁相环应用到转子位置信号的提取中,以经扩张状态观测器估计出的反电势作为锁相环的输入信号,根据反电动势与转子位置之间的关系,建立锁相环转子位置检测系统,来提取反电动势中包含的转子位置信息;
锁相环转子位置检测系统中,锁相环的位置估计的误差传递函数为:

其中,ψf表示永磁磁链, 表示观测出的电角速度,kP(PLL)表示比例系数,ki(PLL)表示积分系数;由于转子位置信号是斜坡函数,锁相环转子位置检测等效系统稳态误差为:
表示观测出的电角速度,kP(PLL)表示比例系数,ki(PLL)表示积分系数;由于转子位置信号是斜坡函数,锁相环转子位置检测等效系统稳态误差为:

由上式可知,转子的误差信号的稳态误差为零,可见采用锁相环观测器可以准确的从反电势中提取出转子位置信息;
S8,当开关处于2时,将给定的机械转速ω*和观测出的机械转速 作差送入转速环PI控制器得到q轴给定电流
作差送入转速环PI控制器得到q轴给定电流 给定的位置角被替换为由扩张状态观测器观测出的补偿后的位置角
给定的位置角被替换为由扩张状态观测器观测出的补偿后的位置角
S9,利用观测出的位置角和转速,实现电机转速和电流的双闭环控制。
2.根据权利要求1所述的基于扩张状态观测器的五相容错永磁电机无位置传感器控制方法,其特征在于,所述步骤S2中q轴给定电流为一个常数值,从而实现将电机启动到一个平稳的转速,电机的额定q轴电流为iqref=12A。
3.根据权利要求1所述的基于扩张状态观测器的五相容错永磁电机无位置传感器控制方法,其特征在于,所述步骤S3中位置角发生器的设计步骤如下:
S3.1,当处于开关1时,位置角发生器函数可以写成以下形式:

其中θref表示给定的位置角,ωe表示给定的电机的电角速度,由上式可知,给定的位置角由电机的电角速度积分而来;初始给定的电角速度为ωe=115rad/s,对应的电机机械转速为ωm=100r/min。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710282630.6A CN107134964B (zh) | 2017-04-26 | 2017-04-26 | 基于扩张状态观测器的五相容错永磁电机无位置传感器控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710282630.6A CN107134964B (zh) | 2017-04-26 | 2017-04-26 | 基于扩张状态观测器的五相容错永磁电机无位置传感器控制方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107134964A CN107134964A (zh) | 2017-09-05 |
| CN107134964B true CN107134964B (zh) | 2020-08-28 |
Family
ID=59716100
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710282630.6A Active CN107134964B (zh) | 2017-04-26 | 2017-04-26 | 基于扩张状态观测器的五相容错永磁电机无位置传感器控制方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN107134964B (zh) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108306571B (zh) * | 2018-01-11 | 2019-12-31 | 江苏大学 | 一种五相永磁直线电机一相开路容错直接推力控制方法 |
| CN108092571B (zh) * | 2018-01-17 | 2021-04-13 | 哈尔滨工业大学 | 一种带lc滤波器永磁同步电机无位置传感器控制系统 |
| CN108718166B (zh) * | 2018-06-15 | 2019-12-10 | 珠海格力电器股份有限公司 | 电机转子位置角确定方法、装置、存储介质及电机 |
| CN108931919A (zh) * | 2018-07-05 | 2018-12-04 | 合肥工业大学 | 一种永磁同步直线电机控制系统及方法 |
| CN109660168B (zh) * | 2018-12-29 | 2020-11-17 | 珠海格力电器股份有限公司 | 一种电机控制方法、系统及电机 |
| CN110557069B (zh) * | 2019-10-25 | 2021-05-11 | 滨州学院 | 转子运行参数估计方法、电机控制系统和自抗扰控制器 |
| CN110971165B (zh) * | 2019-12-06 | 2023-09-08 | 长沙奥托自动化技术有限公司 | 永磁同步发电机的电流环前馈方法及系统 |
| CN110971166A (zh) * | 2019-12-06 | 2020-04-07 | 长沙奥托自动化技术有限公司 | 永磁同步发电机的转子位置的获取方法及控制系统 |
| CN111355410B (zh) * | 2020-04-16 | 2022-04-22 | 无锡凌博电子技术有限公司 | 一种变参数的霍尔传感器永磁同步电机转子位置确定方法 |
| CN111987959A (zh) * | 2020-08-11 | 2020-11-24 | 哈尔滨理工大学 | 永磁同步电机无传感器控制方法 |
| CN112688600A (zh) * | 2021-01-15 | 2021-04-20 | 江苏大学 | 一种用于五相永磁容错电机无位置传感器控制方法 |
| CN113037170B (zh) * | 2021-03-30 | 2022-10-14 | 中国科学院深圳先进技术研究院 | 电机控制方法、装置及终端设备 |
| CN113848717B (zh) * | 2021-09-27 | 2024-07-30 | 北京航空航天大学 | 一种陀螺框架旋转变压器轴角解码系统自校正方法 |
| CN113938077B (zh) * | 2021-10-19 | 2024-04-12 | 河海大学 | 一种无位置传感器的永磁同步电机全速度范围控制方法 |
| CN114337420A (zh) * | 2021-12-28 | 2022-04-12 | 海信(山东)空调有限公司 | 电机控制方法、装置、压缩机、存储介质及空调器 |
| CN115149847B (zh) * | 2022-08-03 | 2023-02-24 | 哈尔滨工业大学 | 五相电机同轴串联系统的轴偏补偿方法 |
| CN115276094B (zh) * | 2022-08-15 | 2023-05-12 | 山东大学 | 基于结构自适应eso的并网变流器预测控制方法及系统 |
| CN115580184B (zh) * | 2022-12-08 | 2023-04-18 | 谱为科技(常州)有限公司 | 驱控一体式步进电机的控制方法、点胶设备 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008245353A (ja) * | 2007-03-26 | 2008-10-09 | Mitsubishi Electric Corp | モータ及びモータ駆動制御装置並びに換気扇、液体用ポンプ、冷媒圧縮機、送風機、空気調和機及び冷蔵庫 |
| CN103312255A (zh) * | 2013-06-18 | 2013-09-18 | 山东大学(威海) | 一种永磁同步电机速度控制方法和装置 |
| CN104052363A (zh) * | 2013-03-15 | 2014-09-17 | 德克萨斯仪器股份有限公司 | 自动化电机控制 |
| CN105827160A (zh) * | 2016-03-18 | 2016-08-03 | 浙江工业大学 | 一种基于自抗扰和锁相环技术的永磁同步电机系统无传感器速度控制方法 |
| CN106208879A (zh) * | 2016-08-30 | 2016-12-07 | 天津理工大学 | 一种基于自抗扰控制器控制异步电动机变频调速系统的方法 |
| CN106330046A (zh) * | 2016-09-13 | 2017-01-11 | 江苏大学 | 基于特定负载的新型五相容错永磁电机无位置传感器控制方法 |
| CN106533299A (zh) * | 2016-12-27 | 2017-03-22 | 山东大学 | 同时消除反电势、负载转矩扰动的伺服控制策略及其系统 |
-
2017
- 2017-04-26 CN CN201710282630.6A patent/CN107134964B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008245353A (ja) * | 2007-03-26 | 2008-10-09 | Mitsubishi Electric Corp | モータ及びモータ駆動制御装置並びに換気扇、液体用ポンプ、冷媒圧縮機、送風機、空気調和機及び冷蔵庫 |
| CN104052363A (zh) * | 2013-03-15 | 2014-09-17 | 德克萨斯仪器股份有限公司 | 自动化电机控制 |
| CN103312255A (zh) * | 2013-06-18 | 2013-09-18 | 山东大学(威海) | 一种永磁同步电机速度控制方法和装置 |
| CN105827160A (zh) * | 2016-03-18 | 2016-08-03 | 浙江工业大学 | 一种基于自抗扰和锁相环技术的永磁同步电机系统无传感器速度控制方法 |
| CN106208879A (zh) * | 2016-08-30 | 2016-12-07 | 天津理工大学 | 一种基于自抗扰控制器控制异步电动机变频调速系统的方法 |
| CN106330046A (zh) * | 2016-09-13 | 2017-01-11 | 江苏大学 | 基于特定负载的新型五相容错永磁电机无位置传感器控制方法 |
| CN106533299A (zh) * | 2016-12-27 | 2017-03-22 | 山东大学 | 同时消除反电势、负载转矩扰动的伺服控制策略及其系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107134964A (zh) | 2017-09-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107134964B (zh) | 基于扩张状态观测器的五相容错永磁电机无位置传感器控制方法 | |
| CN106330046B (zh) | 基于特定负载的五相容错永磁电机无位置传感器控制方法 | |
| Li et al. | Self-correction of commutation point for high-speed sensorless BLDC motor with low inductance and nonideal back EMF | |
| CN108258967B (zh) | 一种基于新型磁链观测器的永磁电机无位置直接转矩控制方法 | |
| CN110350835A (zh) | 一种永磁同步电机无位置传感器控制方法 | |
| Yoo et al. | Novel speed and rotor position estimation strategy using a dual observer for low-resolution position sensors | |
| CN106602941B (zh) | 一种降低无刷直流电机换相转矩脉动的控制装置及方法 | |
| CN103825525B (zh) | 一种改进的无传感器永磁同步电机速度估测方法 | |
| BR102013005561A2 (pt) | Aparelho de controle de motor, e , método de controle de motor | |
| Tian et al. | Rotor position estimation of sensorless PMSM based on extented Kalman filter | |
| CN104104301B (zh) | 一种无速度传感器的内插式永磁同步电机无源控制方法 | |
| CN108945373A (zh) | 集成式水下推进器驱动系统及控制方法 | |
| CN105048919A (zh) | 用于pmsm的无传感器矢量控制的旋转角度估计组件 | |
| CN110649849A (zh) | 一种基于新型滑模观测器的磁通切换型永磁直线电机无位置控制方法 | |
| Arafa et al. | Observer-based sensorless speed control of PMSM: A focus on drive’s startup | |
| Chi | Position-sensorless control of permanent magnet synchronous machines over wide speed range | |
| US8344672B2 (en) | Motor drive control circuit | |
| Schrodl et al. | Sensorless control of PM synchronous motors in the whole speed range including standstill using a combined INFORM/EMF model | |
| CN113078851B (zh) | 一种基于永磁磁链观测器的有限位置集无位置控制方法 | |
| CN104836501B (zh) | 一种永磁同步电动机参数在线辨识的方法 | |
| Krishnan et al. | A back-EMF based sensorless speed control of permanent magnet synchronous machine | |
| Sreepriya et al. | Sensorless control of three phase BLDC motor drive with improved flux observer | |
| Comanescu | Speed, emf and rotor position estimation of pmsm using phase locked loop and simple sliding mode observer | |
| CN105915144B (zh) | 一种永磁同步电机转速跟踪控制方法 | |
| Zhao et al. | Speed estimation of induction motor using modified voltage model flux estimation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |