Rope tensioning and releasing mechanism for intelligent underwater robot recovery
Technical Field
The invention belongs to the field of intelligent underwater robots, and relates to a mechanism for tensioning and automatically releasing a cable when an underwater robot is recovered from the water surface to a mother ship.
Background
The twenty-first century is the century of the ocean. With the increasing demand for space, energy and mineral products, the resources on land are in serious shortage. Therefore, the development of oceans has become increasingly common in the present era. The state puts forward a policy of building a 'sea forcing state', and firstly makes the best effort to develop marine equipment. In recent 20 years, intelligent underwater robots have been developed greatly, and various underwater robots are gradually playing respective roles in the fields of marine scientific research, marine petroleum pipeline maintenance, underwater archaeology and the like.
When the intelligent underwater robot starts to work, the intelligent underwater robot needs to be conveyed to a designated sea area by a mother ship to be released, floats upwards after a task is completed, and is recovered to the mother ship to return to a port. However, the robot recovery work is a difficult operation process due to the influence of sea waves. At present, the intelligent underwater robot mainly adopts a mode of installing a lifting point on a submersible vehicle to carry out recovery operation, but the method needs the connection of the lifting point and a lifting hook, and often needs workers to launch on a boat or even to carry out the operation, so that the danger of laying and recovering when the sea condition is not good is increased.
Disclosure of Invention
The invention mainly relates to a special hook and a recovery net bag matched with the hook for use. The hooks are used in pairs and are arranged on two sides of a butt-joint bell mouth recycled by the underwater robot. The function of the self-locking mechanism is that the self-locking mechanism can be self-locked when the robot hooks, and the self-locking mechanism can be automatically released when the main cable is recovered.
The main components of the hook are a bracket, a cable hook and a pin. The support is used for installing hawser hook and pin, and the horizontal cable rope of hawser hook ability tensioning recovery usefulness, the pin is used for restricting the rotation of hawser hook, prevents that horizontal cable rope from unhooking.
The net bag also comprises the following parts: main cable rope, horizontal cable rope, pin release rope, buffering rope. The main cable is a part connected with the winch when the underwater robot recovers, and transmits the pulling force of the winch. The transverse cable is a part which is butted with a hook outside the robot body when the robot is butted. The pin release rope is connected with the pin and used for pulling the pin out of the bracket. The buffer rope ensures that the transverse cable rope is not subjected to tension before the pin is pulled out.
Further, the pin itself will not be released under gravity, but will be pulled out by the pin release cord when tension is applied to the main cable.
Drawings
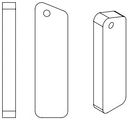
FIG. 1 is a stent diagram;
FIG. 2 is a view of a cable hook;
FIG. 3 is a pin diagram;
figure 4 is an isometric view of the overall effect.
Detailed Description
The following description of the embodiments of the present invention is provided with reference to the accompanying drawings.
The invention is used for a recovery system based on a submersible vehicle, and is arranged at the position of a butt-joint bell mouth 4 of the recovery system and the submersible vehicle. The hook devices are used in pairs and used for tensioning and recovering the net bag.
The hook device comprises three parts, namely a support, a cable hook and a pin.
The bracket is fixed at the end of the bell mouth 4, the middle part of the bracket is provided with a cavity 10, and the cable hook and the pin are arranged in the cavity. The cable hook is bolted to the bracket through the attachment hole 9. The bracket is additionally provided with a sliding groove 11 for pin limiting.
The cable hook is of a particular design and is embodied with a projection 12 at its end. The structure can ensure that the cable hook can not rotate when being subjected to tension, and can firmly hang the transverse cable. The other part 13 of the cable hook can form a loop-shaped structure together with the bracket, so that the transverse cable cannot be separated.
The pin acts against the projection 12 of the cable hook so that it cannot rotate freely. The pin itself will not be released under gravity, but will be pulled out by the pin release cord when tension is applied to the main cable.
The working process of the invention is as follows.
A. Before the submersible is recovered, the cable hook is reset, the pin is installed in the support, and the transverse cable is tied in a ring formed by the cable hook and the support together. No tension is applied to the main cable, and the pin release rope and the buffer rope are in a loose state.
B. When the underwater vehicle starts to be docked, the underwater vehicle actively moves to the bell mouth 4, and the hook on the underwater vehicle hooks the transverse cable. The cable hook does not rotate at this point due to the pin constraint.
C. The main cable begins to exert a pulling force, and due to the effect of the buffer rope, the first to be tensioned is the pin release rope, under the pulling force of which the pin is pulled out.
D. The cable hook is unrestrained and can rotate and release the cross cable. The vehicle is then recovered while tension continues to be applied to the main line. The function of the mechanism is thereby achieved.