Summary of the invention
The object of the invention is based on the basis of GPS and INS, utilize hypercompact coupling location technology, proposed to improve in a kind of Vehicle positioning system the bearing accuracy method, can solve the quick reacquisition that keeps under the GPS look-at-me after location and signal recover, add simultaneously strong and weak signals and catch and improve estimated accuracy under non-interruption, to improve the overall performance of system.
the technical solution adopted for the present invention to solve the technical problems is: the present invention proposes and improve the bearing accuracy method in a kind of Vehicle positioning system, to have reduced the tracking thresholding by vector tracking method VDCPF, has higher estimated accuracy, and under the GPS weak signal, have than scalar and follow the tracks of better performance, but the NCO of vector tracking ring is the navigation calculation Accuracy that is subjected to the hypercompact coupled system of GPS/MIMU, therefore under gps signal interrupts, the DPLL that follows the tracks of due to scalar is not subjected to system's navigation calculation Accuracy, in the short interruption situation, still can keep loop tracks by of short duration MIMU high precision is auxiliary, can realize the non-blind area of locating by method of the present invention.
The present invention uses following concept and computing formula:
One, the hypercompact coupling scalar of GPS/MIMU tracking
Traditional scalar is followed the tracks of concerning each passage, and the status informations such as the velocity and acceleration of receiver are common, so it does not allow to be subject to the impact of receiver navigation calculation precision.
the tracking loop of GPS receiver is mainly to follow the tracks of pseudo-random code and carrier frequency, be code tracking and carrier track, in order to extract the navigation data of 50Hz, be used for position calculation, as a rule, tracking loop is comprised of CPLL and DLL, therefore this scalar tracking also claims delay/phase-locked loop (DPLL, Delay/Phase lock loop), under the normal strong signal of GPS and under the vehicle dynamic environment, the method provides tracking performance preferably, be adapted at the dynamic environment in this Vehicle positioning system application of the present invention, and also have than the strong fix performance at opening, more be with at veil simultaneously and signal interruption occur and can assist reacquisition by MIMU.
(1) eliminate vehicle dynamic stress error
Analyze the performance of carrier tracking loop, mainly be based on the research of thermal noise error and dynamic stress error.As mentioned before, thermal noise error is directly proportional to bandwidth, and dynamic stress error and bandwidth are inversely proportional to.Therefore in order to obtain higher accuracy, reduce the impact of noise error, need the bandwidth that keeps lower; On the other hand, under the vehicle dynamic environment, accelerate in the vehicle experience, when shaking acceleration change, guarantee that less dynamic stress error need to keep higher bandwidth.Bandwidth selection is between 10-20Hz in traditional GPS receiver, the dynamic stress error that guarantee is less.Therefore, the optimization of bandwidth need be considered thermonoise and two factors of dynamic stress.Its thermonoise is:
In formula, B
nBe loop bandwidth, unit is Hz, c/n
0Be carrier-to-noise ratio, T is prediction integration period (1ms).Can see that from formula (2.1) thermonoise is directly proportional to loop bandwidth, be inversely proportional to T and carrier-to-noise ratio simultaneously, therefore can reduce the impact of thermonoise with high integration period under high carrier-to-noise ratio.
The dynamic stress error is:
DR in formula
2/ dt
2The dynamic (m/s of acceleration of maximum direction of visual lines
2), dynamic stress error and loop bandwidth are inversely proportional to, so higher bandwidth has low dynamic stress error.Release 3 σ according to formula (2.1)
PLLError is made of jointly thermonoise and dynamic stress error:
Find that from formula sum of the deviations can not surpass 45 ° of phase places, this maximum phase is the threshold value of loop-locking.Simultaneously, can find out from formula (2.1) and (2.2), due to the selection of bandwidth, be also to have conflict on thermonoise and dynamic property.
The dynamic stress error that causes in situations such as vehicle acceleration, shakes, loop bandwidth must be increased and error could be suppressed, for example, the carrier wave tracking loop bandwidth will remain on 6Hz at least under the 0.1g acceleration, and bandwidth must surpass 15Hz guarantee error under the acceleration of acceleration 1g, in case total error surpasses 45 degree, track loop just can't keep locking so, find from experiment, under the vehicle location environment, the impact on bandwidth of this type of dynamic stress is greater than thermal noise error.
Follow the tracks of gps signal with Matlab software simulation GPS receiver, receive data continues 5s, the wide 13Hz that is arranged on of tradition tracking loop receiver tracking endless belt, by the carrier tracking loop of the more hypercompact coupling scalar tracking of Fig. 2 and the carrier tracking loop performance of traditional GPS receiver, can find from figure, the doppler values variation range is between 1105 to 1194Hz, side-play amount is 89Hz, due to the much higher general skew of strangling, the carrier phase ring is with losing lock, and tracking loop also can switch to the FLL pattern thereupon.And under hypercompact coupling scalar tracking, the carrier track bandwidth is arranged on 3Hz, MIMU information is used for the carrier doppler correction about t=0.7s, as shown in Figure 2, doppler values changes to 1113Hz from peak value 1118Hz, and frequency deviation only has 5Hz, therefore, assisting of MIMU doppler data affected the gps signal that enters tracking loop.
(2) solve GPS and interrupt the location
In hypercompact coupled system receiver, in the of short duration high-precision MIMU that has no progeny utilize satellite ephemeris and position and speed data, calculate the GPS receiver with respect to Doppler shift and the pseudorange of satellite, control carrier wave and a code NCO, after the 120sGPS signal recovers, be easy to continue to keep following the tracks of.Yet in the independent GPS receiver of tradition, the error of code ring phase detector enlarges rapidly after look-at-me, and the loop losing lock will cause the GPS receiver that pseudorange information can't be provided, so that can't navigate.
In emulation experiment, gps signal is arranged on 80s to 120s break period, the C/N of intermediate-freuqncy signal
0Be set to 46dB-Hz.Fig. 3 is the signal carrier-to-noise ratio of the hypercompact coupling scalar of GPS/MIMU tracker receiver output, shown in Figure 4 is the signal carrier-to-noise ratio of traditional GPS receiver output, contrast easy discovery from two width figure, after the 120s signal recovers, the hypercompact coupling scalar of GPS/MIMU tracker receiver can continue to keep following the tracks of, even but the longer time still can't keep following the tracks of traditional GPS receiver after 120s, the carrier-to-noise ratio value is in the 25-26dB-Hz left and right, because this passage can not provide navigation data information again, so the GPS receiver will reenter and catches.
Tradition GPS receiver is after signal interruption, because do not receive gps satellite signal, receiver has just lost navigation feature, and receiver can't be exported navigation information again.But the hypercompact coupling scalar of GPS/MIMU tracker receiver is different, because MIMU is the slave part of track loop, receiver still can be exported navigation information.Utilize as above data experiment emulation, come subcarrier and code tracking loop by MIMU break period in 80-120s, and the error of system receiver as shown in Figure 5.Can find from figure, even at gps signal, the short interruption of 40s in the time occurs, the output of hypercompact coupling scalar tracker receiver still keeps higher precision.
Two, the hypercompact coupling vector tracking of GPS/MIMU method
The scalar tracking is concerning each passage, the status informations such as the velocity and acceleration of receiver are common, and the vector tracking method is the states such as the speed, acceleration of direct estimation receiver from the measurement data of each passage, than the scalar tracking of chapter 3, lower tracking thresholding is arranged
[6]Compare scalar and follow the tracks of, vector tracking can add strong and weak signals to be followed the tracks of, and better estimated accuracy is arranged under identical carrier-to-noise ratio.
The hypercompact coupling vector tracking method of GPS/MIMU has a variety of, and the present invention is mainly to VDCaP vector tracking method
[7]Study, that its code tracking adopts is vector delay lock loop (VDLL, Vector Delay Lock Loop), and that carrier track adopts is cascade phaselocked loop (CaPLL, Cascaded Phase Lock Loop), and it is realized as shown in Figure 6.In figure, we can find that yard NCO and carrier wave NCO are the output feedbacks by combined system, the output quantity of integrated kalman filter device namely, and pseudorange predicated error and carrier doppler predicated error are from corresponding Discr..(1) carrier tracking loop CPFLL
In vector tracking method VDCaP, the phase error of carrier tracking loop becomes large, can cause larger extra doppler values, and the Doppler measurement error is also larger, and this is the defective of CaPLL, and identical defective [8] is also arranged in the phaselocked loop that does not have Doppler to assist simultaneously.
In order to overcome this shortcoming of CaPLL, this patent is by improving CaPLL, design the combined type cascade phaselocked loop of a kind of CaPLL of combining and VFLL, to increase a FLL frequency discriminator on cascade phaselocked loop CaPLL, this design proposal is in phaselocked loop locking and two kinds of situations of losing lock, more reliable Doppler measurement can be provided, thereby improve the performance of the hypercompact coupled system of GPS/MIMU.This combined type cascade phaselocked loop is called CPFLL(CaPLL/VFLL).Therefore, in the hypercompact coupling vector tracking of the GPS/MIMU after improvement method, that its code tracking loop adopts is VDLL, and carrier tracking loop adopts the improved CPFLL of this chapter, and the vector tracking method after therefore improving also claims VDCPF.Single channel CPFLL design as shown in Figure 7.
As shown in Figure 7, f
dmIt is the Doppler measurement output valve.The reset condition of this CPFLL is as follows:
1) under the strong signal environment of GPS, at every turn after Navigation Filter measure to be upgraded, reset when PLI<T=0.9.
2) under the GPS weak signal environment, as PLI<T=0.3 and | f
dm-f
da|>T
fd(T
fd=reset 1-2Hz) time.
Under the strong signal of GPS, get PLI<T=0.9 and be for can be the same with VFLL, obtain best Doppler measurement value, because less than 0.9 the time, the Phase Tracking difficulty is not if take corresponding processing scheme as PLI, track loop will self-adaptation adjustment phase error be zero, but therefore also can produce extra Doppler measurement value, will have influence on pseudorange rates, also can increase the Doppler measurement error.When the Doppler measurement value is used for navigation calculation, will cause navigation performance to descend.For fear of this situation, be with f in the reset schemes of CPFLL intermediate ring road wave filter
LFBe set to zero, so, the input of NCO and f
LFIrrelevant, only be subjected to the impact of aided Doppler amount, the output of frequency discriminator is exactly the margin of error in the aided Doppler value.Just as shown in FIG., the output quantity of frequency discriminator can be filtered out by prefilter, is increased to simultaneously on the aided Doppler value, and this is in order to produce a kind of Doppler measurement value relevant to pseudorange rates, and therefore, aided Doppler amount error is less.Only have the aided Doppler quantitative change to get more accurate, just be conducive to improve the tracking to signal.
The CPFLL loop filter always is not reset, only ought satisfy above-mentioned loop filter reset condition and just can be performed, for example, each Navigation Filter measure upgrade after, and just can be reset when PLI<0.9.If PLI<0.9, at each some update time of measuring, loop filter can be reset, but measures between the update cycle at twice, and loop filter can not reset, and this is locked as far as possible in order to guarantee tracking loop, avoids losing lock.Therefore, between twice measuring period, the tracking loop of CPFLL is still CaPLL, is measuring the update cycle then, and the carrier wave ring is VFLL.When the carrier wave ring was VFLL, the output quantity of frequency discriminator was exactly the aided Doppler measurement error value; But within twice measuring period, obtaining the auxiliary error measuring value of Doppler need to draw by following analytical calculation.
Can find Doppler measurement value f from Fig. 7
dmBe to draw from CaPLL and frequency discriminator, specifically taking from value in CaPLL or frequency discriminator is to be determined by switch, if Doppler's output valve from frequency discriminator, calculating formula is:
In formula,
It is the auxiliary error amount of Doppler.According to shown in Figure 7, if loop filter Doppler output quantity is f
LF, its expression formula is:
f
LF=f
LF,DAE+f
LF,Con (2.5)
F in formula
LF, DAEF
LFThe auxiliary compensation of error part of Doppler, f
LF, ConBe the extra doppler values of adjusting phase place, here Doppler's noise section ignored.In order to simplify calculating, remove the discrete time in variable expression.The Doppler shift measurement value that draws CaPLL is:
Wherein, deduct Doppler's instrumental value f
da, can draw from (2.6) formula
The frequency discriminator output valve is the Doppler error value, and the doppler values of input deducts output valve, and the frequency discriminator output valve is:
f
D=-f
LF,Con (2.8)
Because doppler values accurately is f
da+ f
LF, DAE, Doppler's output valve of CaPLL is f
da+ f
LF, DAE+ f
LF, Con, so the Doppler error value is-f
LF, ConConvolution (2.7) and formula (2.8) substitution formula
Draw:
The left side in formula is to calculate the auxiliary error amount of Doppler, can find out from formula (2.4) and formula (2.6) and formula (2.9), through type (2.4) Doppler measurement calculated value equals Doppler's instrumental value and adds that Doppler assists error amount, and the Doppler measurement value of CaPLL equals the extra doppler values that Doppler's instrumental value adds error amount and is used for regulation and control.If it is very large to be used for the extra doppler values of regulation and control, for example under the weak signal state of moment, if phase loop is in out-of-lock condition, the Doppler measurement value of CaPLL can be larger than the error of formula (2.4) so, therefore, the Doppler measurement value that draws of through type (2.4) calculating formula can be improved this error amount.If loop is because of the signal losing lock, the input of loop may have much noise under weak signal, and the output of Discr. also will incorporate much noise, and the purpose of filtration Discr. output is exactly these noises of filtering, recovers tracking performance.
On the contrary, if the phase loop locking is used for the extra doppler values of regulation and control just close to zero.Therefore, the value that the Doppler measurement value of CaPLL and equation (2.4) calculate equates, but it is narrower to work as noise bandwidth, and in formula (2.4), the Doppler measurement value of CaPLL has a small amount of thermonoise, as shown in Figure 7.Just because of this, phase loop is locking in a single day, and Doppler measurement is all to take from CaPLL.
For the advantage of the Doppler measurement that keeps frequency discriminator, Doppler measurement output will be switched selection according to corresponding conditions, as PLI 〉=T=0.9, and f
dmSwitch to CaPLL, otherwise f
dmSwitch to frequency discriminator.
(2) code tracking loop VFLL
In the hypercompact coupling of GPS/MIMU VDCaP method, that code tracking loop adopts is VDLL, and it designs as shown in Figure 8, in figure, and z
-1The unit delay of expression z conversion.As can be seen from Figure 8, in VDLL, the NCO of each channel is affected by code tracking loop phase place and doppler values only, and these two values are to calculate to get from hypercompact coupled system, rather than the output of Discr..Being used for phase place and the doppler values of control code ring NCO can calculate by system of equations (2.10).
In formula, V is satellite velocity vector, v
uBe the user velocity vector, arrive the sighting distance unit vector of satellite, f but k is the user
TSignal transmission frequencies, for L
1Signal, f
T=1575.42MHz, t
pThe receiver clock deviation, ε
dNoise error, under be designated as ion, tro, the mp item is respectively ionosphere, troposphere, multipath effect equal error.In equation, noise can be left in the basket, and can calculate the carrier doppler frequency displacement by equation, calculates code ring Doppler shift divided by 1540.
In code ring NCO, the code phase that obtains is used for controlling the output of NCO, the code Doppler shift amount that calculates is used for feeding back to NCO.The output of code tracking loop is:
In formula, ρ
mThe pseudo-range measurements of code tracking loop, ρ
NCOThe pseudorange output quantity of NCO,
It is the pseudorange error output quantity of Discr..ρ=c τ, wherein τ is the associated code phase place, c is the light velocity.In practice, usually can think ρ
NCO≈ ρ
E, ρ
EIt is the pseudorange that calculates.
(3) GPS weak signal tracking power
Cause weak signal environment under more according to veil, count respectively the loose lock threshold that vector tracking and scalar are followed the tracks of, as shown in Figure 9, as can be seen from the figure, the carrier-to-noise ratio that follow the tracks of to receive signal when scalar is during lower than 23dB-Hz, the easy losing lock of track loop, and vector tracking will hang down 0.5dB-Hz, is that the carrier-to-noise ratio vector tracking in 0.1 moment is followed the tracks of low 0.5dB-Hz than scalar at the losing lock probability.Experimental result shows, the VDCPF vector tracking is followed the tracks of than chapter 3 DPLL scalar lower loose lock threshold.
Three, follow the tracks of changing method
Vector tracking ring VDCPF has reduced the tracking thresholding, has higher estimated accuracy, and under the GPS weak signal, has than scalar and follow the tracks of better performance.But vector tracking also has its shortcoming, and the NCO of vector tracking ring is the navigation calculation Accuracy that is subjected to the hypercompact coupled system of GPS/MIMU.If gps signal interrupts, the navigation calculation precision can't guarantee semaphore lock, and loop filter resets and the Doppler of CPFLL assists and will end, and the vector tracking ring just can not play a role.The DPLL that follows the tracks of based on scalar is not subjected to system's navigation calculation Accuracy, in the short interruption situation, still can keep loop tracks by of short duration MIMU high precision is auxiliary.Therefore this follows the tracks of for vector tracking and scalar and merges switching possibility is provided.
Based on above-mentioned VDLL and DLL, and the switching standards between CPFLL and CPLL, its changing method block diagram is as shown in 10.The design of this changing method is in order to improve tracking performance in GPS interruption situation, because when satellites in view during lower than 4, GPS/MIMU navigation calculation error will increase, so that can't guarantee semaphore lock under the vector tracking method, therefore switch to scalar and follow the tracks of the maintenance tracking, this handover scheme has improved the performance of GPS/MIMU.
Method flow:
The present invention proposes to improve the bearing accuracy method in a kind of Vehicle positioning system, and it comprises as follows:
One, the hypercompact coupling scalar of GPS/MIMU tracking
(1) eliminate vehicle dynamic stress error
Analyze the performance of carrier tracking loop, mainly be based on the research of thermal noise error and dynamic stress error
[5]As mentioned before, thermal noise error is directly proportional to bandwidth, and dynamic stress error and bandwidth are inversely proportional to.Therefore in order to obtain higher accuracy, reduce the impact of noise error, need the bandwidth that keeps lower; On the other hand, under the vehicle dynamic environment, accelerate in the vehicle experience, when shaking acceleration change, guarantee that less dynamic stress error need to keep higher bandwidth.Bandwidth selection is between 10-20Hz in traditional GPS receiver, the dynamic stress error that guarantee is less.Therefore, the optimization of bandwidth need be considered thermonoise and two factors of dynamic stress.Its thermonoise is:
In formula, B
nBe loop bandwidth, unit is Hz, c/n
0Be carrier-to-noise ratio, T is prediction integration period (1ms).Can see that from formula (2.1) thermonoise is directly proportional to loop bandwidth, be inversely proportional to T and carrier-to-noise ratio simultaneously, therefore can reduce the impact of thermonoise with high integration period under high carrier-to-noise ratio.
The dynamic stress error is:
DR in formula
2/ dt
2The dynamic (m/s of acceleration of maximum direction of visual lines
2), dynamic stress error and loop bandwidth are inversely proportional to, so higher bandwidth has low dynamic stress error.Release 3 σ according to formula (2.1)
PLLError is made of jointly thermonoise and dynamic stress error:
3σ
PLL=3σ
thermal+σ
dynamic<45deg (2.3)
Find that from formula sum of the deviations can not surpass 45 ° of phase places, this maximum phase is the threshold value of loop-locking.Simultaneously, can find out from formula (2.1) and (2.2), due to the selection of bandwidth, be also to have conflict on thermonoise and dynamic property.
The dynamic stress error that causes in situations such as vehicle acceleration, shakes, loop bandwidth must be increased and error could be suppressed, for example, the carrier wave tracking loop bandwidth will remain on 6Hz at least under the 0.1g acceleration, and bandwidth must surpass 15Hz guarantee error under the acceleration of acceleration 1g, in case total error surpasses 45 degree, track loop just can't keep locking so, find from experiment, under the vehicle location environment, the impact on bandwidth of this type of dynamic stress is greater than thermal noise error.
Follow the tracks of gps signal with Matlab software simulation GPS receiver, receive data continues 5s, the wide 13Hz that is arranged on of tradition tracking loop receiver tracking endless belt, by the carrier tracking loop of the more hypercompact coupling scalar tracking of Fig. 2 and the carrier tracking loop performance of traditional GPS receiver, can find from figure, the doppler values variation range is between 1105 to 1194Hz, side-play amount is 89Hz, due to the much higher general skew of strangling, the carrier phase ring is with losing lock, and tracking loop also can switch to the FLL pattern thereupon.And under hypercompact coupling scalar tracking, the carrier track bandwidth is arranged on 3Hz, MIMU information is used for the carrier doppler correction about t=0.7s, as shown in Figure 2, doppler values changes to 1113Hz from peak value 1118Hz, and frequency deviation only has 5Hz, therefore, assisting of MIMU doppler data affected the gps signal that enters tracking loop.
(2) solve GPS and interrupt the location
In hypercompact coupled system receiver, in the of short duration high-precision MIMU that has no progeny utilize satellite ephemeris and position and speed data, calculate the GPS receiver with respect to Doppler shift and the pseudorange of satellite, control carrier wave and a code NCO, after the 120sGPS signal recovers, be easy to continue to keep following the tracks of.Yet in the independent GPS receiver of tradition, the error of code ring phase detector enlarges rapidly after look-at-me, and the loop losing lock will cause the GPS receiver that pseudorange information can't be provided, so that can't navigate.
Two, the hypercompact coupling vector tracking of GPS/MIMU method
The scalar tracking is concerning each passage, the status informations such as the velocity and acceleration of receiver are common, and the vector tracking method is the states such as the speed, acceleration of direct estimation receiver from the measurement data of each passage, than the scalar tracking of chapter 3, lower tracking thresholding is arranged
[6]Compare scalar and follow the tracks of, vector tracking can add strong and weak signals to be followed the tracks of, and better estimated accuracy is arranged under identical carrier-to-noise ratio.
The hypercompact coupling vector tracking method of GPS/MIMU has a variety of, and the present invention is mainly to VDCaP vector tracking method
[7]Study, that its code tracking adopts is vector delay lock loop (VDLL, Vector Delay Lock Loop), and that carrier track adopts is cascade phaselocked loop (CaPLL, Cascaded Phase Lock Loop), and it is realized as shown in Figure 6.In figure, we can find that yard NCO and carrier wave NCO are the output feedbacks by combined system, the output quantity of integrated kalman filter device namely, and pseudorange predicated error and carrier doppler predicated error are from corresponding Discr..
(1) carrier tracking loop CPFLL
In vector tracking method VDCaP, the phase error of carrier tracking loop becomes large, can cause larger extra doppler values, and the Doppler measurement error is also larger, and this is the defective of CaPLL, and identical defective [8] is also arranged in the phaselocked loop that does not have Doppler to assist simultaneously.
In order to overcome this shortcoming of CaPLL, this patent is by improving CaPLL, design the combined type cascade phaselocked loop of a kind of CaPLL of combining and VFLL, to increase a FLL frequency discriminator on cascade phaselocked loop CaPLL, this design proposal is in phaselocked loop locking and two kinds of situations of losing lock, more reliable Doppler measurement can be provided, thereby improve the performance of the hypercompact coupled system of GPS/MIMU.This combined type cascade phaselocked loop is called CPFLL(CaPLL/VFLL).Therefore, in the hypercompact coupling vector tracking of the GPS/MIMU after improvement method, that its code tracking loop adopts is VDLL, and carrier tracking loop adopts the improved CPFLL of this chapter, and the vector tracking method after therefore improving also claims VDCPF.Single channel CPFLL design as shown in Figure 7.
As shown in Figure 7, f
dmIt is the Doppler measurement output valve.The reset condition of this CPFLL is as follows:
1, under the strong signal environment of GPS, at every turn after Navigation Filter measure to be upgraded, reset when PLI<T=0.9.
2, under the GPS weak signal environment, as PLI<T=0.3 and | f
dm-f
da|>T
fd(T
fd=reset 1-2Hz) time.
Under the strong signal of GPS, get PLI<T=0.9 and be for can be the same with VFLL, obtain best Doppler measurement value, because less than 0.9 the time, the Phase Tracking difficulty is not if take corresponding processing scheme as PLI, track loop will self-adaptation adjustment phase error be zero, but therefore also can produce extra Doppler measurement value, will have influence on pseudorange rates, also can increase the Doppler measurement error.When the Doppler measurement value is used for navigation calculation, will cause navigation performance to descend.For fear of this situation, be with f in the reset schemes of CPFLL intermediate ring road wave filter
LFBe set to zero, so, the input of NCO and f
LFIrrelevant, only be subjected to the impact of aided Doppler amount, the output of frequency discriminator is exactly the margin of error in the aided Doppler value.Just as shown in FIG., the output quantity of frequency discriminator can be filtered out by prefilter, is increased to simultaneously on the aided Doppler value, and this is in order to produce a kind of Doppler measurement value relevant to pseudorange rates, and therefore, aided Doppler amount error is less.Only have the aided Doppler quantitative change to get more accurate, just be conducive to improve the tracking to signal.
The CPFLL loop filter always is not reset, only ought satisfy above-mentioned loop filter reset condition and just can be performed, for example, each Navigation Filter measure upgrade after, and just can be reset when PLI<0.9.If PLI<0.9, at each some update time of measuring, loop filter can be reset, but measures between the update cycle at twice, and loop filter can not reset, and this is locked as far as possible in order to guarantee tracking loop, avoids losing lock.Therefore, between twice measuring period, the tracking loop of CPFLL is still CaPLL, is measuring the update cycle then, and the carrier wave ring is VFLL.When the carrier wave ring was VFLL, the output quantity of frequency discriminator was exactly the aided Doppler measurement error value; But within twice measuring period, obtaining the auxiliary error measuring value of Doppler need to draw by following analytical calculation.
Can find Doppler measurement value f from Fig. 7
dmBe to draw from CaPLL and frequency discriminator, specifically taking from value in CaPLL or frequency discriminator is to be determined by switch, if Doppler's output valve from frequency discriminator, calculating formula is:
In formula,
It is the auxiliary error amount of Doppler.According to shown in Figure 7, if loop filter Doppler output quantity is f
LF, its expression formula is:
f
LF=f
LF,DAE+f
LF,Con (2.5)
F in formula
LF, DAEF
LFThe auxiliary compensation of error part of Doppler, f
LF, ConBe the extra doppler values of adjusting phase place, here Doppler's noise section ignored.In order to simplify calculating, remove the discrete time in variable expression.The Doppler shift measurement value that draws CaPLL is:
Wherein, deduct Doppler's instrumental value f
da, can draw from (2.6) formula
The frequency discriminator output valve is the Doppler error value, and the doppler values of input deducts output valve, and the frequency discriminator output valve is:
f
D=-f
LF,Con (2.8)
Because doppler values accurately is f
da+ f
LF, DAE, Doppler's output valve of CaPLL is f
da+ f
LF, DAE+ f
LF, Con, so the Doppler error value is-f
LF, ConConvolution (2.7) and formula (2.8) substitution formula
Draw:
The left side in formula is to calculate the auxiliary error amount of Doppler, can find out from formula (2.4) and formula (2.6) and formula (2.9), through type (2.4) Doppler measurement calculated value equals Doppler's instrumental value and adds that Doppler assists error amount, and the Doppler measurement value of CaPLL equals the extra doppler values that Doppler's instrumental value adds error amount and is used for regulation and control.If it is very large to be used for the extra doppler values of regulation and control, for example under the weak signal state of moment, if phase loop is in out-of-lock condition, the Doppler measurement value of CaPLL can be larger than the error of formula (2.4) so, therefore, the Doppler measurement value that draws of through type (2.4) calculating formula can be improved this error amount.If loop is because of the signal losing lock, the input of loop may have much noise under weak signal, and the output of Discr. also will incorporate much noise, and the purpose of filtration Discr. output is exactly these noises of filtering, recovers tracking performance.
On the contrary, if the phase loop locking is used for the extra doppler values of regulation and control just close to zero.Therefore, the value that the Doppler measurement value of CaPLL and equation (2.4) calculate equates, but it is narrower to work as noise bandwidth, and in formula (2.4), the Doppler measurement value of CaPLL has a small amount of thermonoise, as shown in Figure 7.Just because of this, phase loop is locking in a single day, and Doppler measurement is all to take from CaPLL.
For the advantage of the Doppler measurement that keeps frequency discriminator, Doppler measurement output will be switched selection according to corresponding conditions, as PLI 〉=T=0.9, and f
dmSwitch to CaPLL, otherwise f
dmSwitch to frequency discriminator.
(2) code tracking loop VFLL
In the hypercompact coupling of GPS/MIMU VDCaP method, that code tracking loop adopts is VDLL, and it designs as shown in Figure 8, in figure, and z
-1The unit delay of expression z conversion.As can be seen from Figure 8, in VDLL, the NCO of each channel is affected by code tracking loop phase place and doppler values only, and these two values are to calculate to get from hypercompact coupled system, rather than the output of Discr..Being used for phase place and the doppler values of control code ring NCO can calculate by system of equations (2.10).
In formula, V is satellite velocity vector, v
uBe the user velocity vector, arrive the sighting distance unit vector of satellite, f but k is the user
TSignal transmission frequencies, for L
1Signal, f
T=1575.42MHz, t
pThe receiver clock deviation, ε
dNoise error, under be designated as ion, tro, the mp item is respectively ionosphere, troposphere, multipath effect equal error.In equation, noise can be left in the basket, and can calculate the carrier doppler frequency displacement by equation, calculates code ring Doppler shift divided by 1540.
In code ring NCO, the code phase that obtains is used for controlling the output of NCO, the code Doppler shift amount that calculates is used for feeding back to NCO.The output of code tracking loop is:
In formula, ρ
mThe pseudo-range measurements of code tracking loop, ρ
NCOThe pseudorange output quantity of NCO, ρ
DisIt is the pseudorange error output quantity of Discr..ρ=c τ, wherein τ is the associated code phase place, c is the light velocity.In practice, usually can think ρ
NCO≈ ρ
E, ρ
EIt is the pseudorange that calculates.
(3) GPS weak signal tracking power
Cause weak signal environment under more according to veil, count respectively the loose lock threshold that vector tracking and scalar are followed the tracks of, as shown in Figure 9, as can be seen from the figure, the carrier-to-noise ratio that follow the tracks of to receive signal when scalar is during lower than 23dB-Hz, the easy losing lock of track loop, and vector tracking will hang down 0.5dB-Hz, is that the carrier-to-noise ratio vector tracking in 0.1 moment is followed the tracks of low 0.5dB-Hz than scalar at the losing lock probability.Experimental result shows, the VDCPF vector tracking is followed the tracks of than chapter 3 DPLL scalar lower loose lock threshold.
Three, follow the tracks of changing method
Vector tracking ring VDCPF has reduced the tracking thresholding, has higher estimated accuracy, and under the GPS weak signal, has than scalar and follow the tracks of better performance.But vector tracking also has its shortcoming, and the NCO of vector tracking ring is the navigation calculation Accuracy that is subjected to the hypercompact coupled system of GPS/MIMU.If gps signal interrupts, the navigation calculation precision can't guarantee semaphore lock, and loop filter resets and the Doppler of CPFLL assists and will end, and the vector tracking ring just can not play a role.The DPLL that follows the tracks of based on scalar is not subjected to system's navigation calculation Accuracy, in the short interruption situation, still can keep loop tracks by of short duration MIMU high precision is auxiliary.Therefore this follows the tracks of for vector tracking and scalar and merges switching possibility is provided.
Based on above-mentioned VDLL and DLL, and the switching standards between CPFLL and CPLL, its changing method block diagram is as shown in 10.The design of this changing method is in order to improve tracking performance in GPS interruption situation, because when satellites in view during lower than 4, GPS/MIMU navigation calculation error will increase, so that can't guarantee semaphore lock under the vector tracking method, therefore switch to scalar and follow the tracks of the maintenance tracking, this handover scheme has improved the performance of GPS/MIMU.
Beneficial effect of the present invention:
1, the present invention is when the gps signal short interruption, and the scalar tracking can keep following the tracks of by the auxiliary tracking loop of of short duration high-precision MIMU, and quickly recovers to the hi-Fix before interrupting after signal recovers;
2, the present invention solves the quick reacquisition that keeps under the GPS look-at-me after location and signal recover, and adds strong and weak signals simultaneously under non-interruption
Catch and improve estimated accuracy, to improve the overall performance of system.
Embodiment
Below by in conjunction with Figure of description, further illustrate technical scheme of the present invention.
the present invention proposes and improve the bearing accuracy method in a kind of Vehicle positioning system, to have reduced the tracking thresholding by vector tracking method VDCPF, has higher estimated accuracy, and under the GPS weak signal, have than scalar and follow the tracks of better performance, but the NCO of vector tracking ring is the navigation calculation Accuracy that is subjected to the hypercompact coupled system of GPS/MIMU, therefore under gps signal interrupts, the DPLL that follows the tracks of due to scalar is not subjected to system's navigation calculation Accuracy, in the short interruption situation, still can keep loop tracks by of short duration MIMU high precision is auxiliary, can realize the non-blind area of locating by method of the present invention.
Method flow:
The present invention proposes to improve the bearing accuracy method in a kind of Vehicle positioning system, and it comprises as follows:
One, the hypercompact coupling scalar of GPS/MIMU tracking
(1) eliminate vehicle dynamic stress error
Analyze the performance of carrier tracking loop, mainly be based on the research [5] of thermal noise error and dynamic stress error.As mentioned before, thermal noise error is directly proportional to bandwidth, and dynamic stress error and bandwidth are inversely proportional to.Therefore in order to obtain higher accuracy, reduce the impact of noise error, need the bandwidth that keeps lower; On the other hand, under the vehicle dynamic environment, accelerate in the vehicle experience, when shaking acceleration change, guarantee that less dynamic stress error need to keep higher bandwidth.Bandwidth selection is between 10-20Hz in traditional GPS receiver, the dynamic stress error that guarantee is less.Therefore, the optimization of bandwidth need be considered thermonoise and two factors of dynamic stress.Its thermonoise is:
In formula, B
nBe loop bandwidth, unit is Hz, c/n
0Be carrier-to-noise ratio, T is prediction integration period (1ms).Can see that from formula (2.1) thermonoise is directly proportional to loop bandwidth, be inversely proportional to T and carrier-to-noise ratio simultaneously, therefore can reduce the impact of thermonoise with high integration period under high carrier-to-noise ratio.
The dynamic stress error is:
DR in formula
2/ dt
2The dynamic (m/s of acceleration of maximum direction of visual lines
2), dynamic stress error and loop bandwidth are inversely proportional to, so higher bandwidth has low dynamic stress error.Release 3 σ according to formula (2.1)
PLLError is made of jointly thermonoise and dynamic stress error:
3σ
PLL=3σ
thermal+σ
dynamic<45deg (2.3)
Find that from formula sum of the deviations can not surpass 45 ° of phase places, this maximum phase is the threshold value of loop-locking.Simultaneously, can find out from formula (2.1) and (2.2), due to the selection of bandwidth, be also to have conflict on thermonoise and dynamic property.
The dynamic stress error that causes in situations such as vehicle acceleration, shakes, loop bandwidth must be increased and error could be suppressed, for example, the carrier wave tracking loop bandwidth will remain on 6Hz at least under the 0.1g acceleration, and bandwidth must surpass 15Hz guarantee error under the acceleration of acceleration 1g, in case total error surpasses 45 degree, track loop just can't keep locking so, find from experiment, under the vehicle location environment, the impact on bandwidth of this type of dynamic stress is greater than thermal noise error.
Follow the tracks of gps signal with Matlab software simulation GPS receiver, receive data continues 5s, the wide 13Hz that is arranged on of tradition tracking loop receiver tracking endless belt, by the carrier tracking loop of the more hypercompact coupling scalar tracking of Fig. 2 and the carrier tracking loop performance of traditional GPS receiver, can find from figure, the doppler values variation range is between 1105 to 1194Hz, side-play amount is 89Hz, due to the much higher general skew of strangling, the carrier phase ring is with losing lock, and tracking loop also can switch to the FLL pattern thereupon.And under hypercompact coupling scalar tracking, the carrier track bandwidth is arranged on 3Hz, MIMU information is used for the carrier doppler correction about t=0.7s, as shown in Figure 2, doppler values changes to 1113Hz from peak value 1118Hz, and frequency deviation only has 5Hz, therefore, assisting of MIMU doppler data affected the gps signal that enters tracking loop.
(2) solve GPS and interrupt the location
In hypercompact coupled system receiver, in the of short duration high-precision MIMU that has no progeny utilize satellite ephemeris and position and speed data, calculate the GPS receiver with respect to Doppler shift and the pseudorange of satellite, control carrier wave and a code NCO, after the 120sGPS signal recovers, be easy to continue to keep following the tracks of.Yet in the independent GPS receiver of tradition, the error of code ring phase detector enlarges rapidly after look-at-me, and the loop losing lock will cause the GPS receiver that pseudorange information can't be provided, so that can't navigate.
Two, the hypercompact coupling vector tracking of GPS/MIMU method
The scalar tracking is concerning each passage, the status informations such as the velocity and acceleration of receiver are common, and the vector tracking method is the states such as the speed, acceleration of direct estimation receiver from the measurement data of each passage, than the scalar tracking of chapter 3, lower tracking thresholding is arranged
[6]Compare scalar and follow the tracks of, vector tracking can add strong and weak signals to be followed the tracks of, and better estimated accuracy is arranged under identical carrier-to-noise ratio.
The hypercompact coupling vector tracking method of GPS/MIMU has a variety of, and the present invention is mainly to VDCaP vector tracking method
[7]Study, that its code tracking adopts is vector delay lock loop (VDLL, Vector Delay Lock Loop), and that carrier track adopts is cascade phaselocked loop (CaPLL, Cascaded Phase Lock Loop), and it is realized as shown in Figure 6.In figure, we can find that yard NCO and carrier wave NCO are the output feedbacks by combined system, the output quantity of integrated kalman filter device namely, and pseudorange predicated error and carrier doppler predicated error are from corresponding Discr..(1) carrier tracking loop CPFLL
In vector tracking method VDCaP, the phase error of carrier tracking loop becomes large, can cause larger extra doppler values, and the Doppler measurement error is also larger, and this is the defective of CaPLL, and identical defective [8] is also arranged in the phaselocked loop that does not have Doppler to assist simultaneously.
In order to overcome this shortcoming of CaPLL, this patent is by improving CaPLL, design the combined type cascade phaselocked loop of a kind of CaPLL of combining and VFLL, to increase a FLL frequency discriminator on cascade phaselocked loop CaPLL, this design proposal is in phaselocked loop locking and two kinds of situations of losing lock, more reliable Doppler measurement can be provided, thereby improve the performance of the hypercompact coupled system of GPS/MIMU.This combined type cascade phaselocked loop is called CPFLL(CaPLL/VFLL).Therefore, in the hypercompact coupling vector tracking of the GPS/MIMU after improvement method, that its code tracking loop adopts is VDLL, and carrier tracking loop adopts the improved CPFLL of this chapter, and the vector tracking method after therefore improving also claims VDCPF.Single channel CPFLL design as shown in Figure 7.
As shown in Figure 7, f
dmIt is the Doppler measurement output valve.The reset condition of this CPFLL is as follows:
1, under the strong signal environment of GPS, at every turn after Navigation Filter measure to be upgraded, reset when PLI<T=0.9.
2, under the GPS weak signal environment, as PLI<T=0.3 and | f
dm-f
da|>T
fd(T
fd=reset 1-2Hz) time.
Under the strong signal of GPS, get PLI<T=0.9 and be for can be the same with VFLL, obtain best Doppler measurement value, because less than 0.9 the time, the Phase Tracking difficulty is not if take corresponding processing scheme as PLI, track loop will self-adaptation adjustment phase error be zero, but therefore also can produce extra Doppler measurement value, will have influence on pseudorange rates, also can increase the Doppler measurement error.When the Doppler measurement value is used for navigation calculation, will cause navigation performance to descend.For fear of this situation, be with f in the reset schemes of CPFLL intermediate ring road wave filter
LFBe set to zero, so, the input of NCO and f
LFIrrelevant, only be subjected to the impact of aided Doppler amount, the output of frequency discriminator is exactly the margin of error in the aided Doppler value.Just as shown in FIG., the output quantity of frequency discriminator can be filtered out by prefilter, is increased to simultaneously on the aided Doppler value, and this is in order to produce a kind of Doppler measurement value relevant to pseudorange rates, and therefore, aided Doppler amount error is less.Only have the aided Doppler quantitative change to get more accurate, just be conducive to improve the tracking to signal.
The CPFLL loop filter always is not reset, only ought satisfy above-mentioned loop filter reset condition and just can be performed, for example, each Navigation Filter measure upgrade after, and just can be reset when PLI<0.9.If PLI<0.9, at each some update time of measuring, loop filter can be reset, but measures between the update cycle at twice, and loop filter can not reset, and this is locked as far as possible in order to guarantee tracking loop, avoids losing lock.Therefore, between twice measuring period, the tracking loop of CPFLL is still CaPLL, is measuring the update cycle then, and the carrier wave ring is VFLL.When the carrier wave ring was VFLL, the output quantity of frequency discriminator was exactly the aided Doppler measurement error value; But within twice measuring period, obtaining the auxiliary error measuring value of Doppler need to draw by following analytical calculation.
Can find Doppler measurement value f from Fig. 7
dmBe to draw from CaPLL and frequency discriminator, specifically taking from value in CaPLL or frequency discriminator is to be determined by switch, if Doppler's output valve from frequency discriminator, calculating formula is:
In formula,
It is the auxiliary error amount of Doppler.According to shown in Figure 7, if loop filter Doppler output quantity is f
LF, its expression formula is:
f
LF=f
LF,DAE+f
LF,Con (2.5)
F in formula
LF, DAEF
LFThe auxiliary compensation of error part of Doppler, f
LF, ConBe the extra doppler values of adjusting phase place, here Doppler's noise section ignored.In order to simplify calculating, remove the discrete time in variable expression.The Doppler shift measurement value that draws CaPLL is:
Wherein, deduct Doppler's instrumental value f
da, can draw from (2.6) formula
The frequency discriminator output valve is the Doppler error value, and the doppler values of input deducts output valve, and the frequency discriminator output valve is:
f
D=-f
LF,Con (2.8)
Because doppler values accurately is f
da+ f
LF, DAE, Doppler's output valve of CaPLL is f
da+ f
LF, DAE+ f
LF, Con, so the Doppler error value is-f
LF, ConConvolution (2.7) and formula (2.8) substitution formula
Draw:
The left side in formula is to calculate the auxiliary error amount of Doppler, can find out from formula (2.4) and formula (2.6) and formula (2.9), through type (2.4) Doppler measurement calculated value equals Doppler's instrumental value and adds that Doppler assists error amount, and the Doppler measurement value of CaPLL equals the extra doppler values that Doppler's instrumental value adds error amount and is used for regulation and control.If it is very large to be used for the extra doppler values of regulation and control, for example under the weak signal state of moment, if phase loop is in out-of-lock condition, the Doppler measurement value of CaPLL can be larger than the error of formula (2.4) so, therefore, the Doppler measurement value that draws of through type (2.4) calculating formula can be improved this error amount.If loop is because of the signal losing lock, the input of loop may have much noise under weak signal, and the output of Discr. also will incorporate much noise, and the purpose of filtration Discr. output is exactly these noises of filtering, recovers tracking performance.
On the contrary, if the phase loop locking is used for the extra doppler values of regulation and control just close to zero.Therefore, the value that the Doppler measurement value of CaPLL and equation (2.4) calculate equates, but it is narrower to work as noise bandwidth, and in formula (2.4), the Doppler measurement value of CaPLL has a small amount of thermonoise, as shown in Figure 7.Just because of this, phase loop is locking in a single day, and Doppler measurement is all to take from CaPLL.
For the advantage of the Doppler measurement that keeps frequency discriminator, Doppler measurement output will be switched selection according to corresponding conditions, as PLI 〉=T=0.9, and f
dmSwitch to CaPLL, otherwise f
dmSwitch to frequency discriminator.
(2) code tracking loop VFLL
In the hypercompact coupling of GPS/MIMU VDCaP method, that code tracking loop adopts is VDLL, and it designs as shown in Figure 8, in figure, and z
-1The unit delay of expression z conversion.As can be seen from Figure 8, in VDLL, the NCO of each channel is affected by code tracking loop phase place and doppler values only, and these two values are to calculate to get from hypercompact coupled system, rather than the output of Discr..Being used for phase place and the doppler values of control code ring NCO can calculate by system of equations (2.10).
In formula, V is satellite velocity vector, v
uBe the user velocity vector, arrive the sighting distance unit vector of satellite, f but k is the user
TSignal transmission frequencies, for L
1Signal, f
T=1575.42MHz, t
pThe receiver clock deviation, ε
dNoise error, under be designated as ion, tro, the mp item is respectively ionosphere, troposphere, multipath effect equal error.In equation, noise can be left in the basket, and can calculate the carrier doppler frequency displacement by equation, calculates code ring Doppler shift divided by 1540.
In code ring NCO, the code phase that obtains is used for controlling the output of NCO, the code Doppler shift amount that calculates is used for feeding back to NCO.The output of code tracking loop is:
In formula, ρ
mThe pseudo-range measurements of code tracking loop, ρ
NCOThe pseudorange output quantity of NCO,
It is the pseudorange error output quantity of Discr..ρ=c τ, wherein τ is the associated code phase place, c is the light velocity.In practice, usually can think ρ
NCO≈ ρ
E, ρ
EIt is the pseudorange that calculates.
(3) GPS weak signal tracking power
Cause weak signal environment under more according to veil, count respectively the loose lock threshold that vector tracking and scalar are followed the tracks of, as shown in Figure 9, as can be seen from the figure, the carrier-to-noise ratio that follow the tracks of to receive signal when scalar is during lower than 23dB-Hz, the easy losing lock of track loop, and vector tracking will hang down 0.5dB-Hz, is that the carrier-to-noise ratio vector tracking in 0.1 moment is followed the tracks of low 0.5dB-Hz than scalar at the losing lock probability.Experimental result shows, the VDCPF vector tracking is followed the tracks of than chapter 3 DPLL scalar lower loose lock threshold.
Three, follow the tracks of changing method
Vector tracking ring VDCPF has reduced the tracking thresholding, has higher estimated accuracy, and under the GPS weak signal, has than scalar and follow the tracks of better performance.But vector tracking also has its shortcoming, and the NCO of vector tracking ring is the navigation calculation Accuracy that is subjected to the hypercompact coupled system of GPS/MIMU.If gps signal interrupts, the navigation calculation precision can't guarantee semaphore lock, and loop filter resets and the Doppler of CPFLL assists and will end, and the vector tracking ring just can not play a role.The DPLL that follows the tracks of based on scalar is not subjected to system's navigation calculation Accuracy, in the short interruption situation, still can keep loop tracks by of short duration MIMU high precision is auxiliary.Therefore this follows the tracks of for vector tracking and scalar and merges switching possibility is provided.
Based on above-mentioned VDLL and DLL, and the switching standards between CPFLL and CPLL, its changing method block diagram is as shown in 10.The design of this changing method is in order to improve tracking performance in GPS interruption situation, because when satellites in view during lower than 4, GPS/MIMU navigation calculation error will increase, so that can't guarantee semaphore lock under the vector tracking method, therefore switch to scalar and follow the tracks of the maintenance tracking, this handover scheme has improved the performance of GPS/MIMU.
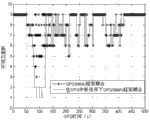
In order to verify the performance of hypercompact coupling changing method, still adopt the vehicle simulation orbit, because changing method is in GPS interruption situation, realize the tracking of look-at-me, therefore adopt under veil more area, a little less than its gps signal, satellites in view is unstable, part GPS easily occurs and interrupts and cause satellites in view low 4 and can't realize the location.In the analogue simulation process, GPS is set to 40s break period, keep PRN08 and 28 satellites during interruption and be used for navigation calculating, be arranged on 80s break period to 120s, during this period of time, the satellites in view that is used for navigation calculation is relatively low under normal circumstances, mostly at about 3-4, specifically sees Figure 11.Make handoff factor between 0 and 1, when handoff factor is 1, adopt the vector tracking method, when GPS interrupts making handoff factor be 0, adopt the scalar tracking, concrete switching figure as shown in figure 12.
As can be seen from Figure 12, when the part gps satellite signal interrupted, carrier tracking loop switched to CPLL at the t=80s place by CPFLL, and code tracking loop switches to DLL at t=88s by VDLL.After GPS interrupt to recover, in order to strengthen the reliability of switching, when satisfying when switching back vector tracking ring condition from the scalar tracking loop, 1 second of switching delay, this is in order to prevent that frequency is switched when the critical value, and therefore when t=121s, CPLL and DLL switch back CPFLL and VDLL simultaneously.
Figure 13 and Figure 14 are that handover scheme is applied to velocity error and the attitude error in the hypercompact coupled system of GPS/MIMU, as can be seen from the figure, under GPS weak signal scene, its location keeps degree of precision, when the GPS transient signals is interrupted, although wanting of the non-interruption situation of error ratio is large, with respect to generally, overall performance has greatly improved.