Pytorch implementation of paper "RANSAC-Flow: generic two-stage image alignment" (ECCV 2020)
[PDF] [Project page] [Demo] [Youtube demo]

If our project is helpful for your research, please consider citing :
@inproceedings{shen2020ransac,
title={RANSAC-Flow: generic two-stage image alignment},
author={Shen, Xi and Darmon, Fran{\c{c}}oise and Efros, Alexei A and Aubry, Mathieu},
booktitle={16th European Conference on Computer Vision}
year={2020}
}
Since some functions have different behaviors in different Pytorch version, we recommand to install EXACT version indicated in the Dependencies if you want to reproduce our results in the paper. For more details, please refer to this issue.
- 1. Visual Results
- 2. Installation
- 3. Quick Start
- 4. Train
- 5. Evaluation
- 6. Acknowledgement
- 7. Changelog
1.1. Aligning Artworks (More results can be found in our project page)
| Input | Our Fine Alignment | ||
|---|---|---|---|
| Animation | Avg | Animation | Avg |
 |
 |
 |
 |
 |
 |
 |
 |
1.2. 3D recontruction (More results can be found in our project page)
| Source | Target | 3D Reconstruction |
|---|---|---|
 |
 |
 |
| Source | Target | Texture Transfer |
|---|---|---|
Other results (such as: aligning duplicated artworks, optical flow, localization etc.) can be seen in our paper.
Our model can be learnt in a single GPU GeForce GTX 1080Ti (12G).
Install Pytorch adapted to your CUDA version :
Other dependencies (tqdm, visdom, pandas, kornia, opencv-python) :
bash requirement.shQuick download :
cd model/pretrained
bash download_model.shFor more details of the pre-trained models, see here
Download the results of ArtMiner :
cd data/
bash Brueghel_detail.sh # Brueghel detail dataset (208M) : visual results, aligning groups of detailsDownload our training data here (~9G). It includes the validation and test data as well.
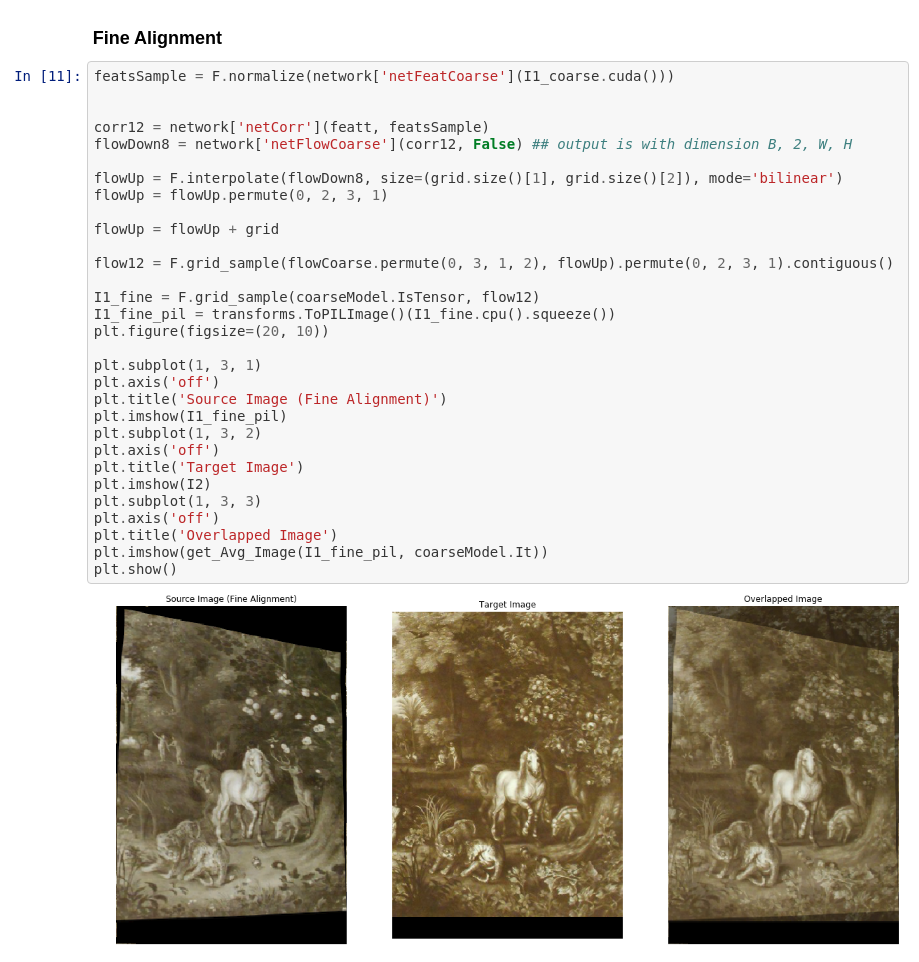
A quick start guide of how to use our code is available in demo.ipynb
To run the training, we need pairs that are coarsely aligned. We provide a notebook to show how to generate the training pairs. Note that, we also provide our training pairs in here.
The training data need to be downloaded from here and saved into ./data. The file structure is :
./RANSAC-Flow/data/MegaDepth
├── MegaDepth_Train/
├── MegaDepth_Train_Org/
├── Val/
└── Test/
As mentioned in the paper, the model trained on MegaDepth contains the following 3 different stages of training:
- Stage 1 : we only trained the reconstruction loss. You can find the hyper-parameters in train/stage1.sh. You can run the training of this stage by :
cd train/
bash stage1.sh- Stage 2 : in this stage, we train jointly: reconstruction loss + cycle consistency of the flow. We started from the model trained in the stage 1. The hyper-parameters are in train/stage2.sh. You need to change the argument --resumePth to your model path. Once it is done, run:
cd train/
bash stage2.sh- Stage 3 : finally, we trained all the three losses together: reconstruction loss + cycle consistency of the flow + matchability loss. We started from the model trained in the stage 2. The hyper-parameters are in train/stage3.sh. You need to change the argument --resumePth to your model path. Once it is done, run:
cd train/
bash stage3.shIf you want to conduct fine-tuning on your own dataset. It is recommended to start from our MegaDepth trained model. You can see all the arguments of training by :
cd train/
python train.py --helpIf you don't need to predict the matchability, you can set the weight of the matchability loss to 0 (--eta 0 in the train.py), and set your path of images (--trainImgDir). Please refer to train/stage2.sh for other arguments.
In case of predicting matchability, you need to tune the weight of the matchability loss (argument --eta in the train.py) depending on the dataset.
The evaluation of different tasks can be seen in the following files:
We appreciate helps from :
-
Jiahui Zhang pointed a bug for YFCC evaluation, see here for the udpate
-
Part of code is borrowed from our previous projects: ArtMiner and Watermark
-
Remove useless parts + rename some functions / parameters to make it compatible with papers + more comments
-
Fix bug in YFCC evaluation, see here. results in the paper have been updated as well.
-
Make a comparison to recent work GLU-Net, results are updated in the paper.
-
Add csv file containing annotated coorespondences for RobotCar, see here for more details.