![]()

This repository implements Field Oriented Control (FOC) for stock hoverboards. Compared to the commutation method, this new FOC control method offers superior performance featuring:
- reduced noise and vibrations
- smooth torque output and improved motor efficiency. Thus, lower energy consumption
- field weakening to increase maximum speed range
- Wiki: please check the wiki pages for Getting Started and for Troubleshooting
- Hardware
- FOC Firmware
- Example Variants
- Projects and Links
- Contributions
The hoverboards with mainboards also come with 2 sideboards(not splitboards), check the following wiki about this firmware
 |
 |
 |
 |
 |
 |

The original Hardware supports two 4-pin cables that originally were connected to the two sideboards. They break out GND, 12/15V and USART2&3 of the Hoverboard mainboard. Both USART2&3 support UART, PWM, PPM, and iBUS input. Additionally, the USART2 can be used as 12bit ADC, while USART3 can be used for I2C. Note that while USART3 (right sideboard cable) is 5V tolerant, USART2 (left sideboard cable) is not 5V tolerant.
Typically, the mainboard brain is an STM32F103RCT6, however some mainboards feature a GD32F103RCT6 which is also supported by this firmware.
For the reverse-engineered schematics of the mainboard, see 20150722_hoverboard_sch.pdf
In this firmware 3 control types are available, it can be set in config.h file via CTRL_TYP_SEL parameter:
- Commutation (COM_CTRL)
- Sinusoidal (SIN_CTRL)
- Field Oriented Control (FOC_CTRL) with the following 3 control modes that can be set in config.h file with parameter CTRL_MOD_REQ:
- VOLTAGE MODE(VLT_MODE): in this mode the controller applies a constant Voltage to the motors. Recommended for robotics applications or applications where a fast motor response is required.
- SPEED MODE(SPD_MODE): in this mode a closed-loop controller realizes the input speed RPM target by rejecting any of the disturbance (resistive load) applied to the motor. Recommended for robotics applications or constant speed applications.
- TORQUE MODE(TRQ_MODE): in this mode the input torque target is realized. This mode enables motor "freewheeling" when the torque target is
0. Recommended for most applications with a sitting human driver.
| Control method | Complexity | Efficiency | Smoothness | Field Weakening | Freewheeling | Standstill hold |
|---|---|---|---|---|---|---|
| Commutation | - | - | ++ | n.a. | n.a. | + |
| Sinusoidal | + | ++ | ++ | +++ | n.a. | + |
| FOC VOLTAGE | ++ | +++ | ++ | ++ | n.a. | +(2) |
| FOC SPEED | +++ | +++ | + | ++ | n.a. | +++ |
| FOC TORQUE | +++ | +++ | +++ | ++ | +++(1) | n.a(2) |
(1) By enabling ELECTRIC_BRAKE_ENABLE in config.h, the freewheeling amount can be adjusted using the ELECTRIC_BRAKE_MAX parameter.
(2) The standstill hold functionality can be forced by enabling STANDSTILL_HOLD_ENABLE in config.h.
In all FOC control modes, the controller features maximum motor speed and maximum motor current protection. This brings great advantages to fulfil the needs of many robotic applications while maintaining safe operation.
- By default the Field weakening is disabled. You can enable it in config.h file by setting the FIELD_WEAK_ENA = 1
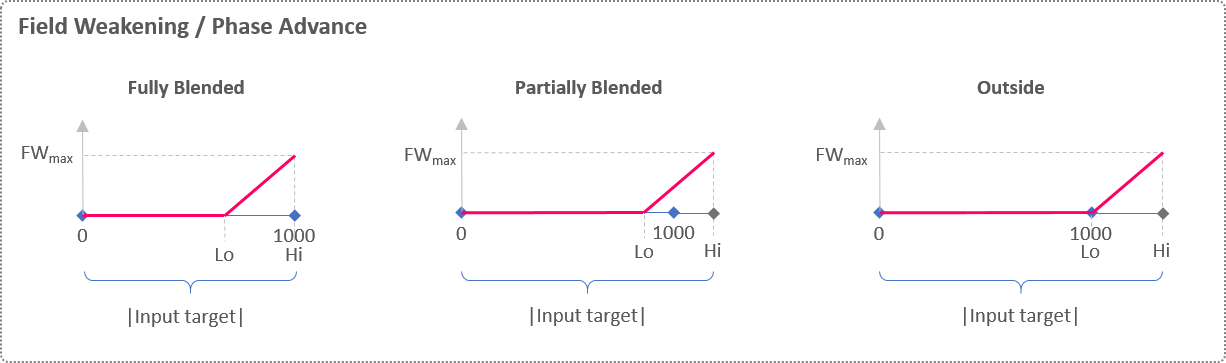
- The Field Weakening is a linear interpolation from 0 to FIELD_WEAK_MAX or PHASE_ADV_MAX (depeding if FOC or SIN is selected, respectively)
- The Field Weakening starts engaging at FIELD_WEAK_LO and reaches the maximum value at FIELD_WEAK_HI
- The figure below shows different possible calibrations for Field Weakening / Phase Advance

- All the calibratable motor parameters can be found in the 'BLDC_controller_data.c'. I provided you with an already calibrated controller, but if you feel like fine tuning it feel free to do so
- The parameters are represented in Fixed-point data type for a more efficient code execution
- For calibrating the fixed-point parameters use the Fixed-Point Viewer tool
- The controller parameters are given in this table
To explore the controller without a Matlab/Simulink installation click on the link below:
https://eferu.github.io/bldc-motor-control-FOC/
- VARIANT_ADC: The motors are controlled by two potentiometers connected to the Left sensor cable (long wired)
- VARIANT_USART: The motors are controlled via serial protocol (e.g. on USART3 right sensor cable, the short wired cable). The commands can be sent from an Arduino. Check out the hoverserial.ino as an example sketch.
- VARIANT_NUNCHUK: Wii Nunchuk offers one hand control for throttle, braking and steering. This was one of the first input device used for electric armchairs or bottle crates.
- VARIANT_PPM: RC remote control with PPM Sum signal.
- VARIANT_PWM: RC remote control with PWM signal.
- VARIANT_IBUS: RC remote control with Flysky iBUS protocol connected to the Left sensor cable.
- VARIANT_HOVERCAR: The motors are controlled by two pedals brake and throttle. Reverse is engaged by double tapping on the brake pedal at standstill. See HOVERCAR wiki.
- VARIANT_HOVERBOARD: The mainboard reads the two sideboards data. The sideboards need to be flashed with the hacked version. The balancing controller is not yet implemented.
- VARIANT_TRANSPOTTER: This is for transpotter build, which is a hoverboard based transportation system. For more details on how to build it check here and here.
- VARIANT_SKATEBOARD: This is for skateboard build, controlled using an RC remote with PWM signal connected to the right sensor cable.
Of course the firmware can be further customized for other needs or projects.
- Original firmware: https://github.com/lucysrausch/hoverboard-firmware-hack
- Candas Hoverboard Web Serial Control: https://github.com/Candas1/Hoverboard-Web-Serial-Control
- RoboDurden's online compiler: https://pionierland.de/hoverhack/
- Hoverboard hack for AT32F403RCT6 mainboards: https://github.com/cloidnerux/hoverboard-firmware-hack
- Hoverboard hack for split mainboards: https://github.com/flo199213/Hoverboard-Firmware-Hack-Gen2
- Hoverboard hack from BiPropellant: https://github.com/bipropellant
- Hoverboard breakout boards: https://github.com/Jana-Marie/hoverboard-breakout
- Bobbycar https://github.com/larsmm/hoverboard-firmware-hack-FOC-bbcar
- Wheel chair: https://github.com/Lahorde/steer_speed_ctrl
- TranspOtterNG: https://github.com/Jan--Henrik/transpOtterNG
- Hoverboard driver for ROS: https://github.com/alex-makarov/hoverboard-driver
- Ongoing OneWheel project: https://forum.esk8.news/t/yet-another-hoverboard-to-onewheel-project/60979/14
- ST Community: Custom FOC motor control
- Telegram Community: If you are an enthusiast join our Hooover Telegram Group

Every contribution to this repository is highly appreciated! Feel free to create pull requests to improve this firmware as ultimately you are going to help everyone.
If you want to donate to keep this firmware updated, please use the link below:

{kind=link}